B25J — Манипуляторы; камеры, оборудованные манипуляторами
Передвижной робот, содержащий манипулятор

Номер патента: 31391
Опубликовано: 29.07.2016
Авторы: БУРАУ, Лоран, СТЭ, Бруно
МПК: B25J 5/00, B62D 57/024
Метки: робот, манипулятор, содержащий, передвижной
Текст:
... устройства, или дальномер. 13. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор(1040 2040) оборудован радиоантенной. 14. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он оснащен колесами (1010, 1020 2010, 2020) или гусеницами. 15. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он приспособлен для работы в условиях военных действий вне...
Дистанционно управляемый мобильный многофункциональный манипулятор
Номер полезной модели: 1402
Опубликовано: 15.03.2016
Авторы: Ахметова Гулжан Жумабеккызы, Антонцев Александр Витальевич, Кальменов Тынысбек Шарипович, Байжанов Бектур Сембиулы, Хачикян Владислав Саркисович, Мендакулов Жасулан Корабаевич
МПК: B25J 5/00
Метки: манипулятор, многофункциональный, управляемый, мобильный, дистанционно
Формула / Реферат:
Дистанционно управляемый мобильный многофункциональный манипуляторПолезная модель относится к робототехнике, в частности к манипуляторам для подъема и транспортировки грузов и может быть использована в работах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения, перемещения и уничтожения взрывоопасных устройств.Технический результат заключается в создании дистанционно управляемого мобильного многофункционального...
Робот телеприсутствия
Номер полезной модели: 1324
Опубликовано: 15.09.2015
Автор: Калиаскаров Нургожа Арманович
МПК: B25J 9/00
Метки: телеприсутствия, робот
Формула / Реферат:
Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия.Техническим результатом является повышение скорости манипуляции, высокая скорость передвижения, износостойкость компонентов робота.Это достигается тем, что робот телеприсутствия, включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей...
Исполнительный механизм параллельного манипулятора типа трипод
Номер инновационного патента: 30337
Опубликовано: 15.09.2015
Авторы: Мырзагельдиева Жанат Муратбековна, Сартаев Куанышбек Заурбекович, Нурахметов Бауржан Кумаргалиевич
МПК: B25J 9/04, B25J 9/10, B25J 9/06...
Метки: исполнительный, механизм, манипулятора, типа, трипод, параллельного
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является функциональное разделение работы приводов за счет выполнения поступательного, как отдельно, так и одновременно, движения его ведущих звеньев, позволяющего уменьшить массу и габариты манипулятора, а также упростить систему его управления.Это достигается тем, что в...
Универсальное роботизированное транспортное средство
Номер полезной модели: 1271
Опубликовано: 15.06.2015
Авторы: Байжанов Бектур Сембиулы, Мендакулов Жасулан Корабаевич, Кальменов Тынысбек Шарипович, Крымусь Евгений Георгиевич, Хачикян Владислав Саркисович
Метки: роботизированное, универсальное, средство, транспортное
Формула / Реферат:
Универсальное роботизированное транспортное средствоПолезная модель относится к робототехнике, в частности к системам, предназначенным для дистанционного перемещения предметов и грузов, сбора данных и может быть использовано в работах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения и уничтожения взрывоопасных устройств, доставки в заданный район специального оборудования, а также при проведении взры вотех н и ч...
Испольнительный механизм робота с двумя схватами
Номер инновационного патента: 29603
Опубликовано: 16.03.2015
Авторы: Байгунчеков Нурлан Жумадилович, Измамбетов Мырзабай Базарбаевич, Байгунчеков Жумадил Жанабаевич
МПК: B25J 9/00
Метки: исполнительный, механизм, схватами, робота, двумя
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является расширение зоны обслуживания и технологической возможности выбора траекторий при координации движения двух захватов манипулятора.Исполнительный механизм...
Исполнительный механизм робота с двумя схватами
Номер инновационного патента: 29602
Опубликовано: 16.03.2015
Авторы: Нурлаев Жаркынбек Анарбекович, Байгунчеков Нурлан Жумадилович, Байгунчеков Жумадил Жанабаевич, Торгаев Рымбек Агимбаевич, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робота, исполнительный, схватами, двумя, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является расширение технологической возможности выбора траекторий при координации движения двух схватов робота.Исполнительный механизм робота, содержащий стойку,...
Исполнительный механизм робота с двумя схватами
Номер инновационного патента: 29601
Опубликовано: 16.03.2015
Авторы: Байгунчеков Нурлан Жумадилович, Байгунчеков Жумадил Жанабаевич, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: двумя, механизм, робота, схватами, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является значительное упрощение управления исполнительным механизмом робота при координации движения двух схватов.Исполнительный механизм робота, содержащий...
Манипулятор SHOLKORS платформенного робота
Номер полезной модели: 1115
Опубликовано: 16.06.2014
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: робота, манипулятор, платформенного, sholkors
Формула / Реферат:
Полезная модель может применяться в машиностроении, приборостроении, в транспортном машиностроении. Преимущественная область применения там, где требуется управление точной ориентацией и перемещением объектов в пространстве при больших несущих массах, а также - в качестве опор.В конструкцию манипулятора, в котором одна платформа относительно другой имеет шесть управляемых степеней свободы, введены новые конструктивные элементы в виде трехзвенных...
Мобильный робототехнический комплекс с управлением на основе искусственного интеллекта
Номер инновационного патента: 28438
Опубликовано: 15.05.2014
Авторы: Ибраева Айгерим Кайруллаевна, Атанов Сабыржан Кубейсинович
МПК: B25J 9/00
Метки: робототехнический, управлением, искусственного, основе, комплекс, мобильный, интеллекта
Формула / Реферат:
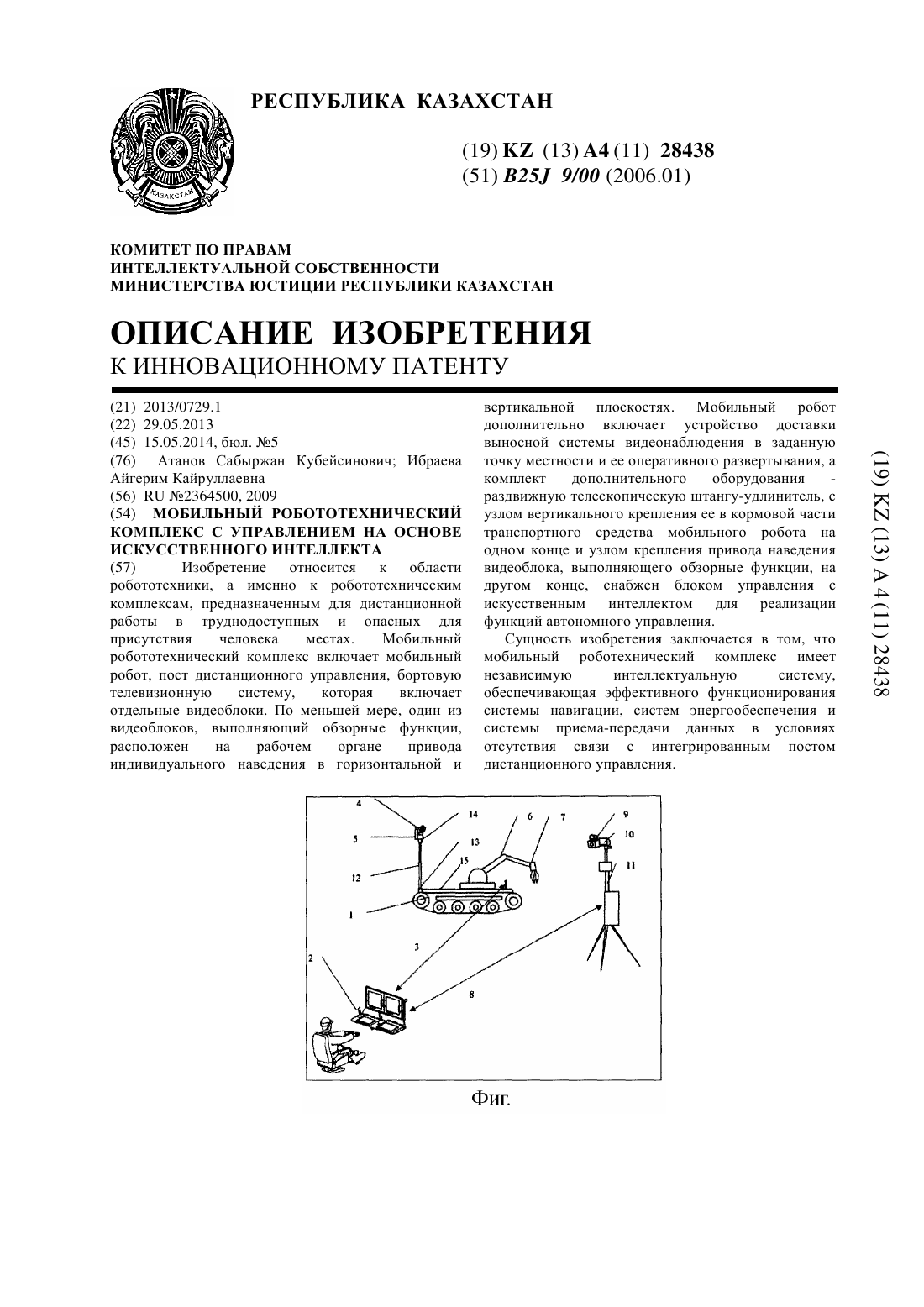
МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С УПРАВЛЕНИЕМ НА ОСНОВЕ ИСКУССТВЕННОГО ИНТЕЛЛЕКТАИзобретение относится к области робототехники, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. По...
Многозвенное сферическое соединение (варианты)
Номер инновационного патента: 27181
Опубликовано: 15.07.2013
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 17/00, B25J 1/00, F16C 1/00...
Метки: соединение, варианты, сферическое, многозвенное
Формула / Реферат:
Изобретение относится к области машиностроения, приборостроения и может быть использовано в качестве опор и соединений нескольких тел, которые могут совершать независимые угловые перемещения относительно одной неподвижной точки.Первый вариант сферического соединения представляет соединение 3 выходных звеньев, объединяющих карданный механизм и шаровую пару, в котором крестовина в механизме кардана выполняется в виде сферического охватывающего...
Клещевой захват
Номер инновационного патента: 25060
Опубликовано: 15.12.2011
Авторы: Сулейманов Ушум Саидалиевич, Дейнеко Павел Павлович, Сулейманов Адам Ушумович, Дейнеко Павел Федорович
МПК: B66C 1/58, B25J 15/08
Формула / Реферат:
Изобретение относится к грузоподъемным устройствам и может быть использовано при строительстве дорог и наземных сооружений, в частности, для уплотнения поверхностного слоя грунта ударным способом. Задачей, на решение которой направлено данное изобретение, является создание такого клещевого захвата, который может быть использован без применения ручного труда при захвате и освобождении поднимаемого груза, включая его освобождение в поднятом...
Клещевой захват
Номер инновационного патента: 23751
Опубликовано: 15.03.2011
Авторы: Поветкин Виталий Васильевич, Байымбетов Рустем, Турдалиев Ауезхан Турдалиевич, Амир Бахыт Тилеулесулы, Алтынов Жархын Лесович
МПК: B25J 1/06
Формула / Реферат:
Изобретение предназначено для использования в области подъемно-транспортного машиностроения, в частности для захвата, транспортировки и кантования штучных грузов.Расширение технологических возможностей захвата, путем закрепления клещевого захвата к пневмоцилиндру и установления автоматического фиксатора положения захватных губок клещевого захвата. Также установка к захватным губкам вращательную пару с электроприводом позволит кантовать штучный...
Автооператор
Номер инновационного патента: 22498
Опубликовано: 17.05.2010
Автор: Дейнеко Павел Федорович
МПК: B23Q 7/00, B23Q 7/04, B23Q 7/05...
Метки: автооператор
Формула / Реферат:
Изобретение относится к машиностроению, а именно к механизмам, обеспечивающим загрузку ориентированных изделий в зону обработки или на место установки. Задачей, на решение которой направлено данное изобретение, является создание более простого механизма для захвата предмета, перемещения вниз и освобождения. Технический результат, получаемый от использования изобретения - упрощение конструкции и новая функция, заключающаяся в возможности опускать...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 20724
Опубликовано: 16.02.2009
Авторы: Чеккарелли Марко, Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович, Нурахметов Бауржан Кумаргалиевич
МПК: B25J 9/10, B25J 9/04, B25J 9/06...
Метки: механизм, исполнительный, параллельного, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является функциональное разделение работы приводов, позволяющее уменьшить массу манипулятора, увеличить срок службы и надежность его работы, упростить систему его управления.Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем шестиугольную...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 20725
Опубликовано: 16.02.2009
Авторы: Мырзагельдиева Жанат Муратбековна, Байгунчеков Жумадил Жанабаевич, Чеккарелли Марко, Нурахметов Бауржан Кумаргалиевич
МПК: B25J 9/06, B25J 9/04, B25J 9/10...
Метки: параллельного, манипулятора, исполнительный, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является функциональное разделение работы приводов за счет выполнения вращательного и поступательного, как отдельно, так и одновременно, движения его ведущих звеньев, что позволяет уменьшить массу и габариты манипулятора, а также упростить систему его управления.Это достигается...
Шарнирный манипулятор шестикоординатного стола
Номер предварительного патента: 19415
Опубликовано: 15.05.2008
Авторы: Шоланов Корганбай Сагнаевич, Кочетков Андрей Анатольевич
МПК: B25J 11/00
Метки: шестикоординатного, манипулятор, шарнирный, стола
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки деталей сложной конфигурации, а также в робототехнике.Для увеличение объема зоны обслуживания и улучшения качественных показателей шарнирный манипулятор шестикоординатного стола, составленный из основания и двух незамкнутых двухподвижных кинематических цепей расположенных в параллельных плоскостях, соединен соединительным звеном....
Одноконтурный параллельный манипулятор
Номер предварительного патента: 19265
Опубликовано: 15.04.2008
Авторы: Сбатаев Еркебулан Мадениетович, Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор, параллельный, одноконтурный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки деталей сложной конфигурации, а также в робототехнике.Для увеличения объема зоны обслуживания и улучшения качественных показателей в одноконтурном параллельном манипуляторе, составленном из основания и двух незамкнутых двухподвижных кинематических цепей расположен-ных в параллельных плоскостях, последние от основания звенья...
Параллельный манипулятор платформенного типа SHOLKOR 2
Номер предварительного патента: 18893
Опубликовано: 15.11.2007
Авторы: Байтурганова Винера Канапияевна, Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: типа, параллельный, sholkor, платформенного, манипулятор
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественная область использования, там где требуется управление в пространстве ориентацией и перемещением объектов при больших несущих массах, например, в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, для столов многофункциональных станков в машиностроении.В данном изобретении в конструкции манипулятора параллельного платформенного...
Манипулятор
Номер предварительного патента: 18892
Опубликовано: 15.11.2007
Авторы: Бекетов Галымжан Шакирович, Журсенбаев Балахазы Ибрайович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспорт-ному машиностроению. Манипулятор может использоваться с различными видами рабочего навесного оборудования в различных отраслях хозяйства, может быть применен в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков штабеллеров для валки, пакетирования и погрузки деревьев, с копающим и погрузочным ковшом экскватора - для погрузки сыпучих и навалочных грузов на железнодорожные платформы,...
Клещевой захват
Номер предварительного патента: 18323
Опубликовано: 15.03.2007
Автор: Жумаев Жолдыбай
Формула / Реферат:
Изобретение предназначено для использования в области подъемной техники, в частности для захвата и транспортировки штучных грузов. Клещевой захват; содержащий правый и левый рычаги, скрепленные по середине шарниром, к концам рычагов с помощью шарниров прикреплены тяговые рычаги, соединенные вместе центральным шарниром, за который крепится несущий канат, захватные губки, отличающийся тем, что к шарнирам крепления тяговых рычагов шарнирно...
Параллельный манипулятор платформенного типа SHOLKOR
Номер предварительного патента: 17442
Опубликовано: 15.06.2006
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: платформенного, манипулятор, параллельный, sholkor, типа
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественной областью применения является использование в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, столов многофункциональных станков в машиностроении.В манипуляторе SHOLKOR предложено новое взаимное расположение узловых точек верхней и нижней платформ и 6 соединительных кинематических цепей. Кинематические...
Пространственный регулируемый исполнительный механизм робота
Номер патента: 12175
Опубликовано: 15.03.2006
Автор: Канлыбаев Оразалы
МПК: B25J 9/00
Метки: исполнительный, механизм, регулируемый, пространственный, робота
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного регулируемого исполнительного механизма робота, расположенного на взаимно перпендикулярных осях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений, позицирование объектами различных конфигураций и...
Измерительная головка для робота
Номер предварительного патента: 14092
Опубликовано: 15.03.2004
Авторы: Нургали Омар Жаннатулы, Кадыров Жаннат Нургалиевич, Кадырова Бахыт Балташевна, Кадырова Зауре Жаннатовна, Кадыров Ильяс Жаннатович, Кадыров Байсал Жаннатович, Кадырова Мадина Жаннатовна
МПК: B25J 19/00
Метки: головка, робота, измерительная
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в промышленных роботах, преимущественно транспортного типа, предназначенного для вырезания контуров в плоских заготовках рабочим лучом лазерной головки, а также для промышленных роботов сварочного и сборочного типов. Технический результат при использовании предлагаемого изобретения заключается в повышении точности позиционирования, уменьшении габаритов и энергоемкости...
Исполнительный механизм манипулятора
Номер предварительного патента: 12080
Опубликовано: 15.10.2002
Авторы: Дайжонг Су, Байдлаева Гульбахыт Кенесовна, Садыков Женис Абжанович, Барри Хулл, Нурахметов Бауржан Кумаргалиевич, Сейтбеков Айдар Лесбекович, Мир Насири Назим, Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович, Жумашева Жадыра Токановна
МПК: B25J 3/00
Метки: механизм, исполнительный, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных и монтажных работ.Технический результат изобретения - обеспечение синхронного движения двух рабочих точек от одного привода.Исполнительный механизм манипулятора содержит стойку, семь звеньев, шесть из которых соединены по три звена и между собой вращательными шарнирами в две кинематические цепи с рабочими точками в третьих звеньях, выполненных в виде...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 11955
Опубликовано: 16.09.2002
Авторы: Нурахметов Бауржан Кумаргалиевич, Байгунчеков Нурлан Жумадилович, Дюсеков Абдибек Коптлеуович, Байдлаева Гульбахыт Кенесовна, Садыков Женис Абжанович, Жумашева Жадыра Токановна, Сейтбеков Айдар Лесбекович, Байгунчеков Жумадил Жанабаевич
МПК: B25J 9/10, B25J 9/06, B25J 9/04...
Метки: механизм, исполнительный, манипулятора, параллельного
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является расширение функциональных возможностей работы манипулятора.Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем треугольную стойку с тремя шарнирами, платформу с шарнирами, из которых первый, второй и третий соединены с шарнирами...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 11956
Опубликовано: 16.09.2002
Авторы: Дайжонг Су, Байгунчеков Жумадил Жанабаевич, Байдлаева Гульбахыт Кенесовна, Нурахметов Бауржан Кумаргалиевич, Барри Хулл, Мир Насири Назим, Садыков Женис Абжанович, Байгунчеков Нурлан Жумадилович, Сейтбеков Айдар Лесбекович, Жумашева Жадыра Токановна
МПК: B25J 9/04, B25J 9/10, B25J 9/06...
Метки: параллельного, исполнительный, механизм, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является расширение функциональных возможностей работы манипулятора.Исполнительный механизм параллельного манипулятора содержит треугольную стойку с тремя шарнирами, платформу с шарнирами, соединенными связями с шарнирами стойки, причем, один из шарниров платформы и один из...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 11298
Опубликовано: 15.03.2002
Авторы: Садыков Женис Абжанович, Нурахметов Бауржан Кумаргалиевич, Байгунчеков Нурлан Жумадилович, Байдлаева Гульбахыт Кенесовна, Жумашева Жадыра Токановна, Байгунчеков Жумадил Жанабаевич, Сейтбеков Айдар Лесбекович
МПК: B25J 9/04, B25J 9/10, B25J 9/06...
Метки: исполнительный, механизм, манипулятора, параллельного
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ. Техническим результатом изобретения является функциональное разделение работы приводов, позволяющее уменьшить массу манипулятора, увеличить срок его службы и надежность его работы, упростить систему его управления.Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем...
Исполнительный механизм манипулятора
Номер предварительного патента: 9980
Опубликовано: 15.03.2001
Авторы: Радж Гилл, Байгунчеков Жумадил Жанабаевич, Садыков Женис Абжанович, Антони Уайт, Байгунчеков Нурлан Жумадилович, Нурахметов Бауржан Кумаргалиевич, Жумашева Жадыра Токановна, Абдрашев Саттар Жусупович
МПК: B25J 9/00
Метки: механизм, исполнительный, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных монтажных работ.Техническим результатом является обеспечение координации движения двух рабочих точек манипулятора, повышение его грузоподъемности и точности позиционирования. Исполнительный механизм манипулятора, содержащий стойку, три звена, соединенные между собой вращательными шарнирами в кинематическую цепь с рабочей точкой в третьем звене, начало...
Захватная головка манипулятора
Номер предварительного патента: 9900
Опубликовано: 15.02.2001
Авторы: Ким Федор Иванович, Орымбаев Галымжан Уалханович, Инкаров Болат Гарипович
МПК: B25J 15/00
Метки: захватная, головка, манипулятора
Формула / Реферат:
Изобретение относится к кожевенно-меховой отрасли легкой промышленности, в частности, к устройствам для поштучного захвата сырья и полуфабрикатов из штабеля, кипы, настила, и может быть использовано в робототехнических устройствах.Повышение надежности захвата и расширение технологических возможностей устройства достигается тем, что захватная головка манипулятора, содержащая корпус, шток с приводом линейного перемещения, механический схват с...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 9429
Опубликовано: 15.09.2000
Авторы: Байгунчеков Жумадил Жанабаевич, Чанмугам Раймунд, Байгунчеков Нурлан Жумадилович, Гилл Радж, Жумашева Жадыра Токановна, Уайт Антони
МПК: G05G 11/00, B25J 9/04
Метки: параллельного, манипулятора, механизм, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных и погрузочно-разгрузочных работ.Техническим результатом изобретения является уменьшение массы манипулятора, увеличение его надежности и срока службы, упрощение системы управления за счет функционального разделения работы приводов.Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем треугольную стойку с тремя...
Пространственный исполнительный механизм робота
Номер предварительного патента: 9242
Опубликовано: 14.07.2000
Авторы: Канлыбаева Марфуга Оразалыевна, Балахметов Болат Кажахметович, Канлыбаев Оразалы
МПК: B25J 9/00
Метки: механизм, робота, пространственный, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного исполнительного механизма робота, расположенного во взаимно перпендикулярных плоскостях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений одновременную работу с тремя объектами в трехмерном...
Исполнительный механизм декартова манипулятора
Номер предварительного патента: 9089
Опубликовано: 15.06.2000
Автор: Ибраев Саят Мурат-улы
Метки: механизм, декартова, исполнительный, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является повышение надежности и КПД работы исполнительного механизма декартова манипулятора.Это достигается тем, что в известной конструкции, содержащей стойку, первое и второе ведущие звенья, первое, второе, третье и четвертое шарнирно сочлененные ведомые рычажные звенья, из...
Соединительный модуль руки промышленного робота
Номер предварительного патента: 6484
Опубликовано: 14.08.1998
Автор: Кайнарбеков Асемхан
МПК: B25J 18/00
Метки: робота, соединительный, модуль, промышленного, руки
Формула / Реферат:
Соединительный модуль промышленного робота относится к области машиностроения и может быть использован для промышленных роботов-манипуляторов с большой грузоподъемностью.Повышение жесткости конструкции достигается тем, что соединительный модуль руки промышленного робота содержит поворотное устройство из двух подвижных элементов, фланцы для его крепления к схвату и к последнему звену руки, первый подвижный элемент выполнен в виде первого...
Захват манипулятора
Номер предварительного патента: 5241
Опубликовано: 15.10.1997
Авторы: Байгунчеков Жумадил Жанабаевич, Джолдасбеков Скандарбек Умирбекович, Журсенбаев Балагазы Ибраевич
МПК: B25J 15/04
Метки: манипулятора, захват
Формула / Реферат:
Изобретение относится к машиностроению, а именно к роботам и манипуляторам.Технический результат - расширение зоны захвата и уменьшение нагрузок в соединениях.Захват содержит стойку, коромысло, образующие со звеньями и со стойкой первый параллелограмм, который сферически соединен с одной стороны посредством дополнительного рычага со звеном с проушиной, которая сферически соединена с ползуном, с другой стороны коромысло сферически соединено с...
Манипулятор шестикоординатного стола
Номер предварительного патента: 3430
Опубликовано: 10.06.1996
Авторы: Округин Валерий Григорьевич, Шоланов Корганбай Сагниевич
МПК: B25J 11/00
Метки: шестикоординатного, стола, манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки сложной конфигурации, а также в робототехнике.Технический результат, достигаемый изобретением - повышение грузоподъемности и снижение энергоемкости.Для этого в манипуляторе шестикоординатного стола, составленного из основания и параллельно соединенных двух незамкнутых кинематических цепей, последние от основания звенья которых...
Устройство для автоматического управления роботом-манипулятором
Номер предварительного патента: 2967
Опубликовано: 15.03.1996
Авторы: Джолдасбеков Умирбек Арисланович, Кусаинов Бухар Кажикенович, Молдабеков Мейирбек Молдабекович
МПК: B25J 9/00
Метки: устройство, автоматического, роботом-манипулятором, управления
Формула / Реферат:
Предлагаемое устройство для автоматического управления роботом-манипулятором обеспечивает оптимизацию быстродействия и демпфирования его исполнительной системы управления при любых полезных нагрузках и любых радиусах переноса полезного груза. Для этого привод вращения звена манипулятора содержит регулятор положения, регулятор обратной связи по скорости, элемент сравнения, блок вычисления момента инерции вращающихся частей. Автоматическое...
Захват для перемещения предмета из расплава в газообразную среду .
Номер патента: 2962
Опубликовано: 15.12.1995
Автор: Доминик Лимузэн FR
МПК: G21C 19/105, B25J 15/08
Метки: предмета, расплава, газообразную, среду, перемещения, захват
Формула / Реферат:
Захват для перемещения предмета из расплава в газообразную среду, содержит трубчатый корпус, связаный со средством перемещения предмета, и ползун, установленный, с возможностью перемещения в аксиальном направлении внутри трубчатого корпуса, а также средства захватывания предмета, выполненные с возможностью радиального перемещения между положениями захватывания и высвобождения предмета за счет их взаимодействия с ползуном. Трубчатый корпус...
Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Джамалов Нутпулла Камалович, Слуцкий Леонид Иосифович, Джолдасбеков Умирбек Арисланович, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робот, промышленный
Формула / Реферат:
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно...
Схват позиционирующий
Номер патента: 2080
Опубликовано: 15.06.1995
Автор: Зайцев Сергей Викторович
МПК: B25J 15/00
Метки: позиционирующий, схват
Формула / Реферат:
Изобретение относится к манипуляторам, к схватам позиционирующим. Схват позиционирующий содержит корпус с гидроплунжерами, на которых закреплены зажимные рычаги с губками, и систему управления. Схват снабжен регулируемым упором, смонтированным на корпусе с возможностью взаимодействия с одним из зажимных рычагов, в корпусе выполнены осевые проточки, в которых с возможностью плоскопараллельного перемещения расположены плунжеры, выполненные...