Параллельный манипулятор платформенного типа SHOLKOR
Формула / Реферат
Изобретение относится к робототехнике и мехатронике. Преимущественной областью применения является использование в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, столов многофункциональных станков в машиностроении.
В манипуляторе SHOLKOR предложено новое взаимное расположение узловых точек верхней и нижней платформ и 6 соединительных кинематических цепей. Кинематические цепи соединяются в трех узловых точках на каждой платформе, образуя в первом узле соединение одной кинематической цепи с платформой, во втором узле - соединение двух кинематических цепей с платформой и в третьем узле - соединение трех кинематических цепей с платформой. Такое взаимное расположение узловых точек и соединительных кинематических цепей позволяет синтезировать любое пространственное движение в виде суммы простейших движений, что упрощает задачи управления и повышает функциональные возможности манипулятора.
МПК / Метки
МПК: B25J 11/00
Метки: sholkor, манипулятор, типа, параллельный, платформенного
Код ссылки
<a href="https://kz.patents.su/0-pp17442-parallelnyjj-manipulyator-platformennogo-tipa-sholkor.html" rel="bookmark" title="База патентов Казахстана">Параллельный манипулятор платформенного типа SHOLKOR</a>
Манипулятор шестикоординатного стола
Номер предварительного патента: 3430
Опубликовано: 10.06.1996
Авторы: Шоланов Корганбай Сагниевич, Округин Валерий Григорьевич
МПК: B25J 11/00
Метки: стола, манипулятор, шестикоординатного
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки сложной конфигурации, а также в робототехнике.Технический результат, достигаемый изобретением - повышение грузоподъемности и снижение энергоемкости.Для этого в манипуляторе шестикоординатного стола, составленного из основания и параллельно соединенных двух незамкнутых кинематических цепей, последние от основания звенья которых...
Манипулятор
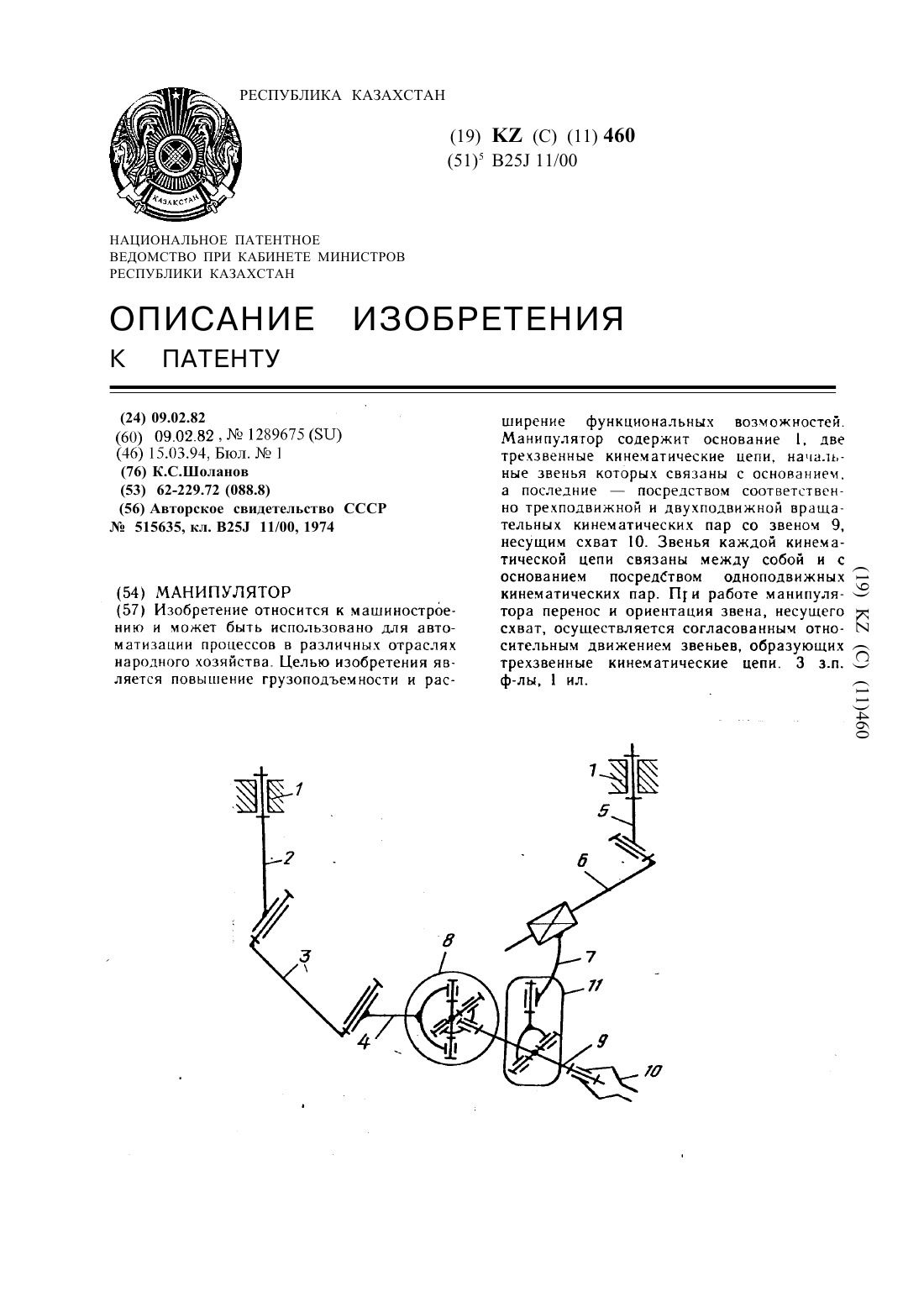
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 9429
Опубликовано: 15.09.2000
Авторы: Жумашева Жадыра Токановна, Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович, Гилл Радж, Уайт Антони, Чанмугам Раймунд
МПК: G05G 11/00, B25J 9/04
Метки: исполнительный, параллельного, механизм, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных и погрузочно-разгрузочных работ.Техническим результатом изобретения является уменьшение массы манипулятора, увеличение его надежности и срока службы, упрощение системы управления за счет функционального разделения работы приводов.Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем треугольную стойку с тремя...
Исполнительный механизм манипулятора
Номер предварительного патента: 12080
Опубликовано: 15.10.2002
Авторы: Дайжонг Су, Жумашева Жадыра Токановна, Байдлаева Гульбахыт Кенесовна, Барри Хулл, Мир Насири Назим, Байгунчеков Нурлан Жумадилович, Байгунчеков Жумадил Жанабаевич, Сейтбеков Айдар Лесбекович, Садыков Женис Абжанович, Нурахметов Бауржан Кумаргалиевич
МПК: B25J 3/00
Метки: механизм, исполнительный, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных и монтажных работ.Технический результат изобретения - обеспечение синхронного движения двух рабочих точек от одного привода.Исполнительный механизм манипулятора содержит стойку, семь звеньев, шесть из которых соединены по три звена и между собой вращательными шарнирами в две кинематические цепи с рабочими точками в третьих звеньях, выполненных в виде...
Шарнирно-рычажный поднастраивающийся механизм
Номер предварительного патента: 4052
Опубликовано: 16.12.1996
Автор: Аскаров Ерлан Сейткасымович
МПК: F16H 21/00, F16H 21/04
Метки: механизм, шарнирно-рычажный, поднастраивающийся
Формула / Реферат:
Изобретение относится к шарнирно-рычажным преобразователям непрерывного вращательного движения в колебательное и в частности найдет применение в механизмах автоматических устройств.Для повышения динамической устойчивости и уменьшения износа шарнирно-рычажный поднастраивающийся механизм, состоящий из стойки, кривошипа, шатуна, присоединенных к свободному концу шатуна двух двухповодковых кинематических групп, каждая из которых состоит из двух...
Предыдущий патент: Способ изготовления оболочковых форм из песчано-смоляной смеси
Следующий патент: Способ прямого легирования стали
Случайный патент: Способ прогнозирования рецидива злокачественных опухолей век