Манипулятор
Формула / Реферат
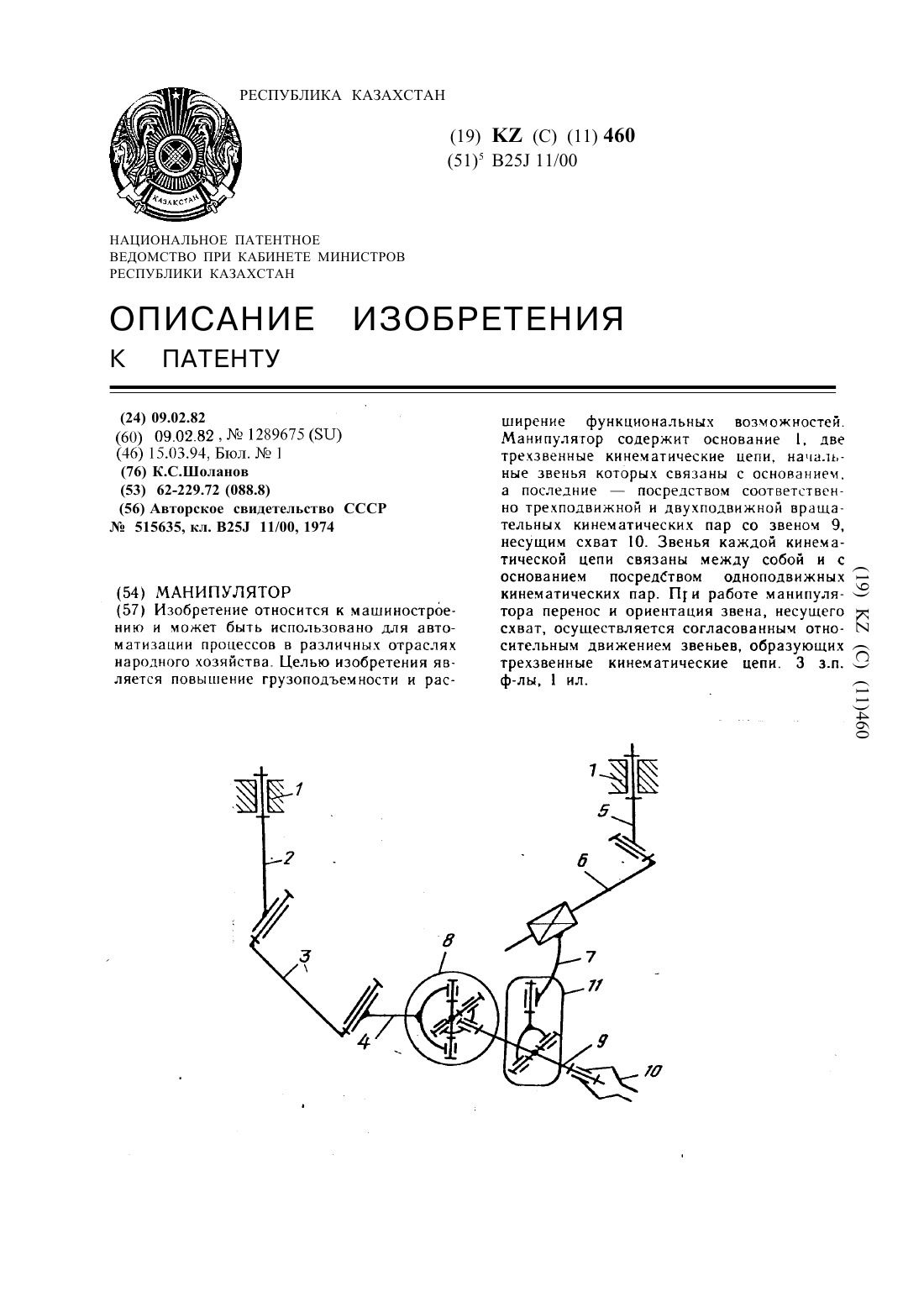
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических пар со звеном 9, несущим схват 10. Звенья каждой кинематической цепи связаны между собой и с основанием посредством одноподвижных кинематических пар. При работе манипулятора перенос и ориентация звена, несущего схват, осуществляется согласованным относительным движением звеньев, образующих трехзвенные кинематические цепи.
Текст
НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО ПРИ КАБИНЕТЕ МИНИСТРОВ РЕСПУБЛИКИ КАЗАХСТАН(60) О 9.02.823 Г 91289675(5 П) Манипулятор содержит основание 1, две(46)15-03-94 БЮЛ- 5591 трехзвеиные кинематические цепи, началь(76) К-С-ШОЛаНОВ ные звенья которых связаны с основанием,(53) 62-229.72 (088.8) а последние посредством соответствен(56) Авторское свидетельство СССР но трехподвижной и двухподвижной вращаЛе 515635, кл. В 25.1 11/00,1974 тельных кинематических пар со звеном 9, несущим схват 10. Звенья каждой кинематической цепи связаны между собой и с основанием посредством одноподвижных(54) МАНИПУЛЯТОР кинематических пар. Пуи работе манипуля(57) Изобретение относится к машинострое тора перенос и ориентация звена, несущего ник) и может быть использовано для авто- схват, осуществляется согласованным отноматизации процессов в различных отраслях сительным движением звеньев, образующих народного хозяйства. Целью изобретения яв- трехзвенные кинематические цепи. 3 з.п.ЛЯВТСЯ ПОВЫШЕНИЕ ГРУЗОПОДЪЕМНОСТН И рЗС- ф-ЛЫ, 1 ИЛ.Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. .На чертеже представлена пространственная структурная схема манипулятора.Манипулятор содержит основание 1 и механизм перемещения схвата, выполненный в виде двух незамкнутых трехподвижных кинематических цепей, образуемых соответственно звеньями 2-4 и 5-7. Звенья каждой кинематической цепи связаны между собой и с основанием посредством одноподвижных кинематических пар. Последнее от основания 1 звено 4 одной из кинематических цепей посредством трехподвижной враШагсльной кинематической пары 8 связано со звеном 9, несущим схват Ю. Последнее от осъюиания 1 звено 7 другой кинематической цепи связано со звеном 9 посредством двухподвижной вращательной пары Н.Точки пересечения осей вращения трехподвижной 8 и двухподвижной Н вращательных пар расположены на оси роции схвата 10, причем ось ротации схвата 10 совпадает с одной из осей вращения трехподвижной вращательной кинематическойдвухподвижной вращательной кинематической пары Н. При работе манипулятора перенос и несущего схват 10,осуществляетстт согласованными относительными движениями звеньев 24 и 57. Необходнмость в согласовании движения вызвано наличием связи последних от основания звеньев 4 и 7 двух кинематических цепей между собой посредством звена 9 и кинематических пар 8 и Н. Ориентация схва 460ТЗ ПРОИЗВОДИТСЯ ИЛИ ОДНОВрЕМЕННЫМ ДВИжением ЗВЕНЬЕ ДВУХ КИНЕМЗТНЧЕСКНХ ЦЕПЕЙС ВЫПОЛНЕННЕМ УСЛОВИЯ ПОСТОЯНСТВЗ РЗССТОЯния между точками пересечения осей вращения трехподвижной 8 и двухподвижной Н вращательных кинематических пар, или последовательным движением звеньев каждой из кинематических цепей при заторможенном состоянии звеньев другой цепи.. Манипулятор. содержащий основание,связанный с ним пространственный механизм перемещения схвата и звено, несущее схват, шарнирно связанное в двух точках с последними о основания звеньями механизма перемещении схвата. отличающийсяТЕМ, ЧТО. С ЦЕЛЬЮ ПОВЫШЕНИЯ ГРУЗОПОДЬЭМ НОС ти и расширсчття функциональных возможностей. механизм перемещения схват выполнен в виде двух незамкнутых кинематических цепен, . последние от основанияЗВЕНЬЯ КОТОРЫХ обладают ТРЕМЯ СТЕПСНЯЧНсвободы и связаны со звеном, несущим схват посредством трехподвижной и двухподвижной вращательных кинематических пар.2. Манипулятор по п. , отличающийся тем, что каждая из двух кинематических цепей выполнена трехзвенной с одт оподвнжиымн кинематическнмн парами.3. Манипулятор по п. 1, отличающийся тем, что точки пересечения осей вращениятрехподвнжной и двухподвижной вращатель ных кинематических пар соответственно расположены на оси ротации схвата.4. тианипулятор по п. 3, отличающийся тем, что ось ротации схвата совпадает с одной из осей вращения трехподвижной врацтательной кинематической пары и перпендикулярна осям вращения двухподвижной вращательной кинематической пары.
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор
Код ссылки
<a href="https://kz.patents.su/2-460-manipulyator.html" rel="bookmark" title="База патентов Казахстана">Манипулятор</a>
Манипулятор
Номер патента: 459
Опубликовано: 15.03.1994
Авторы: Байгунчеков Жумадил Жанабаевич, Акимкулова Куралай Еркембаевна, Рахматуллаев Абдижалел Шайманович, Журсенбаев Балагазы Ибраевич, Джолдасбеков Умирбек Арисланович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков-штабелеров, а также с различными видами другого рабочего навесного оборудования и позволяет расширить зону обслуживания. Цель изобретения - расширение зоны обслуживания. Манипулятор, установленный на подвижном шасси, содержит поворотную раму, стойку, закрепленную на ней стрелу, на...
Манипулятор
Номер патента: 50
Опубликовано: 10.12.1993
Автор: Фролов Дмитрий Михайлович
МПК: B25J 18/06, B25J 1/00
Метки: манипулятор
Формула / Реферат:
Использование: в манипуляторах, имеющих многозвенную структуру и предназначенных для работы в труднодоступных местах. Имеется распорочный элемент тяг, выполненный в виде основания с цилиндрическим бортиком, в котором выполнены радиальные отверстия под тяги. Первый приводной узел выполнен в виде кольца, установленного коаксиально основанию распорочного элемента с возможностью вращения в горизонтальной плоскости, а второй приводной узел - в виде...
Устройство для измерения отклонений от соосности осей отверстий коренных подшипников блоков цилиндров двигателей внутреннего сгорания
Номер предварительного патента: 21
Опубликовано: 10.12.1993
Автор: Синельников Борис Иосифович
МПК: G01B 5/25
Метки: сгорания, отверстий, соосности, блоков, двигателей, подшипников, коренных, осей, внутреннего, измерения, устройство, цилиндров, отклонений
Формула / Реферат:
Изобретение относится кизмерительной технике. Изобретение позволяетконтролировать отклонения осей отверстийкоренных подшипников различных типоразмеровблоков цилиндров двигателей при помощиспециального устройства. Устройство содержиткорпус в виде прямоугольника со сквознымипазами, рядом с которыми укреплены на шарнирахотсчетные узлы с измерительными наконечниками,проходящими через сквозные пазы до контакта спроверяемой поверхностью, базовые...
Предыдущий патент: Манипулятор
Следующий патент: Манипулятор
Случайный патент: Платформа для сбора и транспортировки плодов