Манипулятор
Номер патента: 459
Опубликовано: 15.03.1994
Авторы: Акимкулова Куралай Еркембаевна, Джолдасбеков Умирбек Арисланович, Байгунчеков Жумадил Жанабаевич, Рахматуллаев Абдижалел Шайманович, Журсенбаев Балагазы Ибраевич
Формула / Реферат
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков-штабелеров, а также с различными видами другого рабочего навесного оборудования и позволяет расширить зону обслуживания. Цель изобретения - расширение зоны обслуживания. Манипулятор, установленный на подвижном шасси, содержит поворотную раму, стойку, закрепленную на ней стрелу, на конце которой установлен многозвенный шарнирный механизм перемещения исполнительной рукояти, приводы перемещения стволы и рукояти, выполненные в виде телескопических гидроприводов, дополнительный телескопический гидропривод перемещения исполнительной рукояти, установленный на одном ив рычагов многозвенного шарнирного механизма и связанный с рычагом и со стойкой многозвенный шарнирный механизм шарнирно закреплен на конце стрелы и выполнен в виде механизма Чебышева. На одной из тяг многозвенного шарнирного механизма выполнена проушина, а исполнительная рукоять выполнена в виде составного звена, состоящего из двух шарнирно соединенных звеньев, одно из этих звеньев содержит проушину, шарнирно соединенную с указанной тягой, а другое - шарнирно соединено о другой тягой, а также кинематически связано с проушиной первой тяги.
Текст
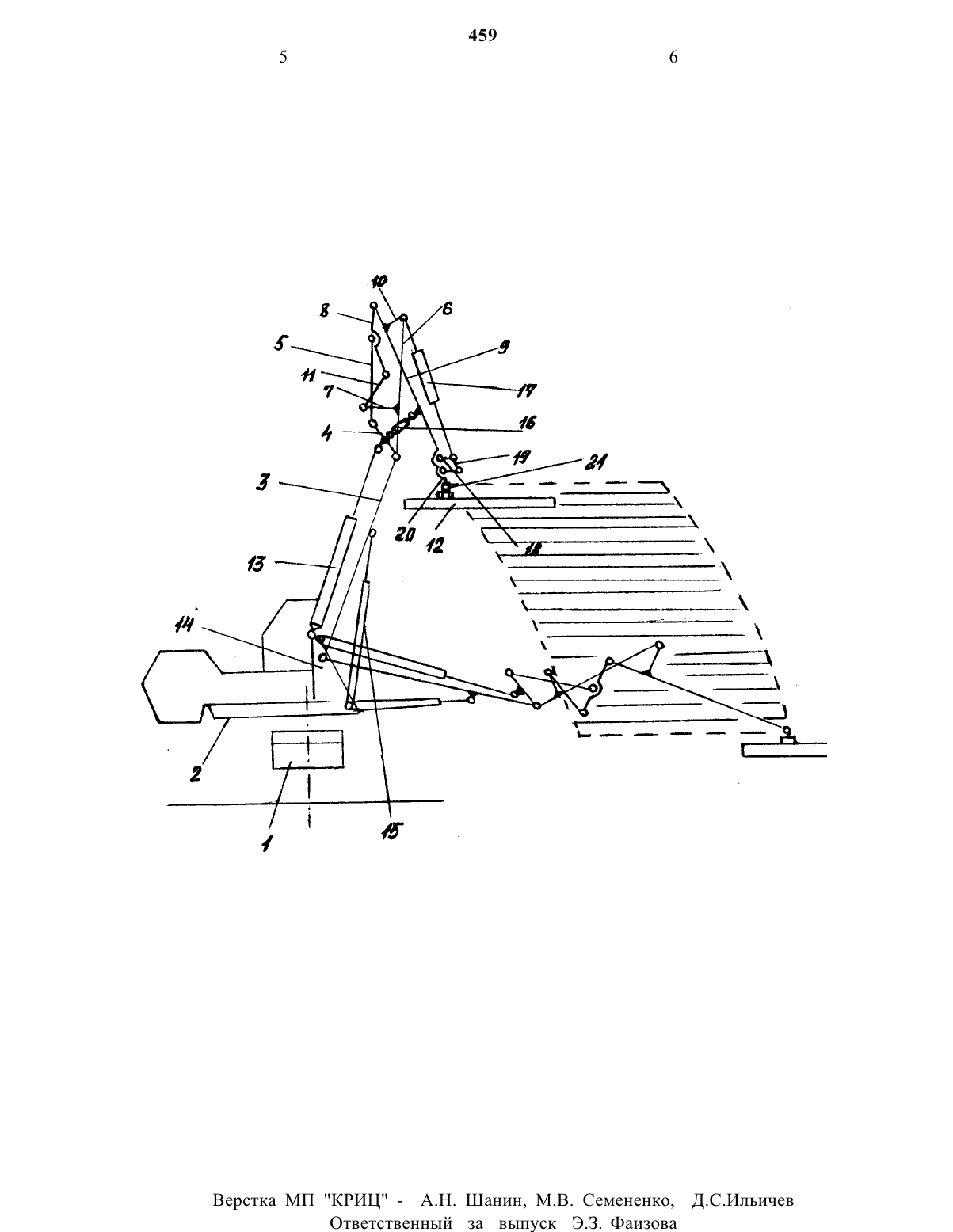
НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО ПРИ КАБИНЕТЕ МИНИСТРОВ РЕСПУБЛИКИ КАЗАХСТАН(56) Авторское свидетельство СССР Мг 1104015,кл. В 25 5/00, 1982 г.(57) Изобретение относится к подъемнотранспортному машиностроению и может быть использовано в составе рабочего оборудования валочно-пакетирующих машин или погрузчиковштабелеров, а также с различными видами другого рабочего навесного оборудования и позволяет расширить зону обслуживания. Цель изобретения - расширение зоны обслуживания. Манипулятор, установленный на подвижномшасси, содержит поворотную раму, стойку,закрепленную на ней стрелу, на конце которой установлен многозвенный Шарнирный механизм перемещения исполнительной рукояти, приводы перемещения стволы и рукояти, выполненные в виде телескопических гидроприводов, дополнительный телескопический гидропривод перемещения исполнительной рукояти, установленный на одном ив рычагов многозвенного шарнирного механизма и связанный с рычагом и со стойкой многозвенный шарнирнь 1 й механизм шарнирно закреплен на конце стрелы и выполнен в виде механизма Чебышева. На одной из тяг многозвенного шарнирного механизма выполнена проушина, а исполнительная рукоять выполнена в виде составного звена, состоящего из двух шарнирно соединенных звеньев, одно из этих звеньев содержит проушину, шарнирно соединенную с указанной тягой, а другое шарнирно соединено о другой тягой, а также кинематически связано с проушиной первой тяги.Изобретение относится к подъемнотранспортному машиностроению. Оно используется с различными видами рабочего навесного оборудования в различных отраслях народного хозяйства и может быть применено в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков-штабелеров - для валки,пакетирования и погрузки деревьев, с копающим и погрузочным ковшом экскаватора - для погрузки сыпучих и навалочных грузов на железнодорожные платформы, полувагоны, автомобильный транспорт, для разработки связных грузов, с рабочей площадкой - для производства строительных и монтажных работ.Целью изобретения является расширение зоны обслуживания.На чертеже изображена кинематическая схема манипулятора.Манипулятор состоит из подвижного шасси 1 иустановленной на нем поворотной рамы 2,сочлененной со стрелкой 3. На конце стрелы шарнирно укреплен рычаг 4, на котором с помощью двух тяг 5 и 6, причем тяга 6 содержит проушину 7,установлена исполнительная рукоять, выполненная в виде составного звена, состоящего из двух шарнирно соединенных звеньев 8 и 9, причем звено 9 содержит проушину 10, шарнирно соединенную с поворотной тягой 6, а звено 8 шарнирно соединено с поворотной тягой 5 и посредством дополнительного звена 11 с проушиной 7 поворотной тяги 6. Рабочий орган 12 крепится в точке звена 9, совершающей прямолинейное перемещение. С помощью телескопического гидропривода 13 перемещения исполнительной рукояти рычаг 4 связан со стойкой 14. Управление стрелой 3 и рукоятью осуществляется гидроцилиндрами 15 и 16. Дополнительный гидроцилиндр 16 укреплен на рычаге 4. Поворотрабочего органа 12 в вертикальной плоскости осуществляется Механизмом, состоящим из гидроцилиндра 17, рычага 18, Шарнирно укрепленного на звене 9 рукояти, и тяги 10,свободным концом связанной с корпусом рабочего органа 12 или с рычагом подвижного упора 20,который взаимодействует с упором 21,установленным на рабочем органе 12.В предлагаемой конструкции манипулятора точка крепления рабочего органа 12 движется строго по прямолинейной траектории при соблюдении следующих соотношений длин звеньев если принять за единицу длины длину поворотной тяги 5, то длина другой поворотной тяги 6 будет равна 1,64, а длина ее проушины 7 равна 0,27,длина рычага 4 равна 0,47, длина звена 8 исполнительной рукояти равна 1,64, а длина звена 9 последней и его проушины соответственно 2,27 и 0,27, и, наконец, длина дополнительного звена 11 равна 0,82.Манипулятор работает следующим образом. В зависимости от характера выполняемой работ устанавливают подвижное шасси 1 в положении,при котором удобно выполнять требуемые операции (погрузочно-разгрузочнь 1 е , валочнопакетирующие, строительно-монтажные).Путем разворота поворотной рамы 2 совмещают плоскость действия рабочего оборудования с требуемой зоной обслуживания. Манипуляциями стрелы 3 устанавливают рабочий орган 12 на уровне выполняемых операций, например, захвата бревен,спиливания деревьев, зачерпывания пачки бревен или сыпучего материала. Управляя телескопическим приводом 13, устанавливают необходимый угол наклона плоскости траектории перемещения рабочего органа 12.Например, для выполнения погрузочноразгрузочных операций устанавливают преимущественно горизонтальное перемещение челюстного захвата, а когда необходимо сгребать материал, хранящийся в откосах, с помощью погрузочного ковша или вилочного захвата устанавливают наклонную плоскость траектории,параллельную плоскости откоса. Далее поворотом исполнительной составной рукояти перемещают рабочий орган к месту выполнения операций 4захвата бревна, спиливания дерева, зачерпывания насыпного материала из штабеля и т.д. Рабочую площадку строительного подъемника перемещают к месту посадки монтажника и загрузки инструментов и материалов.После захвата или зачерпывания груза, спиливания дерева или посадки монтажника в рабочую площадку манипуляциями стрелы 3 И составнойрукояти, разворотом поворотной рамы 2 осуществляют подачу груза к месту разгрузки, а рабочей площадки - в зону производстваБлагодаря выполнению на поворотной тяге 6 проушины 7, а рукояти - в виде составного звена 8,9, причем звено 9 содержит проушину 10,шарнирно соединенную с поворотной тягой 6, а другое звено 8 шарнирно соединено с поворотной тягой 5 и посредством дополнительного звена 11 с проушиной 7 поворотной тяги 6, зона обслуживания увеличивается в 2 раза.Манипулятор, установленный на подвижном шасси, содержащий поворотную раму, стойку,закрепленную на ней стрелу, на конце которой установлен многозвенный Шарнирный механизм перемещения исполнительном рукояти, приводы перемещения стрелы и рукояти, выполненные в виде телескопических гидроприводов,дополнительный телескопический гидропривод перемещения исполнительной рукояти,установленный на одном из рычагов многозвенного шарнирного механизма и связанный с рычагом и со стойкой, причем многозвенный Шарнирный механизм Шарнирно закреплен на конце стрелы И выполнен в виде механизма Чебышева,отличающийся тем, что, с целью расширения зоны обслуживания, на одном из тяг многозвенного шарнирного механизма выполнена проушина, а исполнительная рукоять выполнена в виде составного звена, состоящего из двух шарнирно соединенных звеньев, причем одно из этих звеньев содержит проушину, шарнирно соединенную с указанной тягой, а другое - Шарнирно соединено с другой тягой, а также кинематически связано с проушиной первой тяги.Верстка МП КРИЦ - А.Н. Шанин, М.В. Семененко, Д.С.ИлЬИчев Ответственный за выпуск Э.З. Фаизова
МПК / Метки
МПК: B25J 5/00
Метки: манипулятор
Код ссылки
<a href="https://kz.patents.su/3-459-manipulyator.html" rel="bookmark" title="База патентов Казахстана">Манипулятор</a>
Манипулятор
Номер патента: 50
Опубликовано: 10.12.1993
Автор: Фролов Дмитрий Михайлович
МПК: B25J 18/06, B25J 1/00
Метки: манипулятор
Формула / Реферат:
Использование: в манипуляторах, имеющих многозвенную структуру и предназначенных для работы в труднодоступных местах. Имеется распорочный элемент тяг, выполненный в виде основания с цилиндрическим бортиком, в котором выполнены радиальные отверстия под тяги. Первый приводной узел выполнен в виде кольца, установленного коаксиально основанию распорочного элемента с возможностью вращения в горизонтальной плоскости, а второй приводной узел - в виде...
Стенд для сборки и разборки узлов
Номер патента: 458
Опубликовано: 15.03.1994
Авторы: Нечунаев Сергей Владимирович, Трибус Валентин Яковлевич
МПК: B23P 19/02
Метки: разборки, узлов, стенд, сборки
Формула / Реферат:
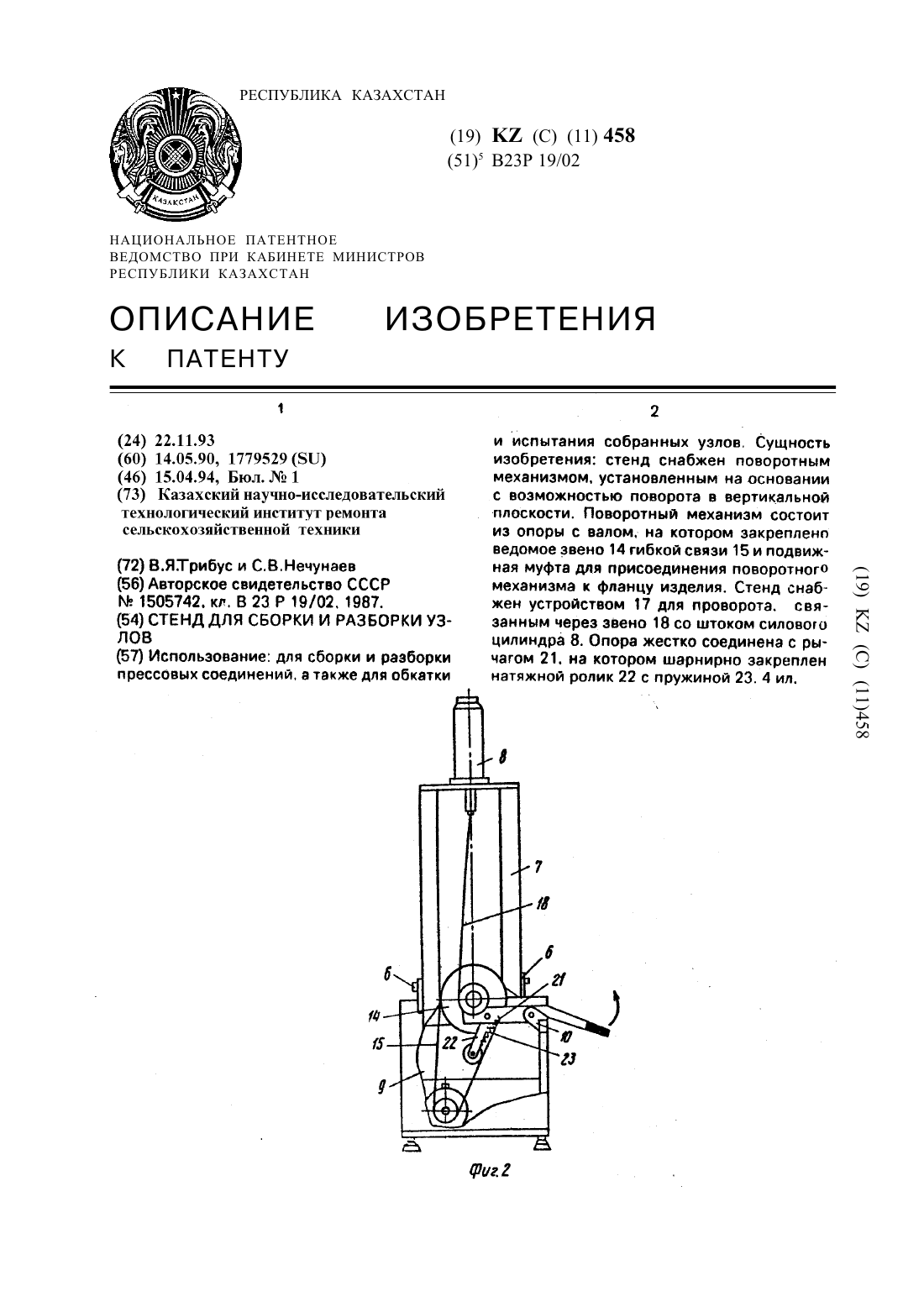
Использование: для сборки и разборки прессовых соединений, а также для обкатки и испытания собранных узлов. Сущность изобретения: стенд снабжен поворотным механизмом, установленным на основании с возможностью поворота в вертикальной плоскости. Поворотный механизм состоит из опоры с валом, на котором закреплено ведомое звено 14 гибкой связи 15 и подвижная муфта для присоединения поворотного механизма к фланцу изделия. Стенд снабжен устройством 17...
Механизм перемещения и фиксации рельсового элемента на подрельсовом основании
Номер патента: 78
Опубликовано: 10.12.1993
Авторы: Валов Владимир Васильевич, Хаустова Прасковья Игнатьевна, Глейзер Геннадий Ефимович
Метки: основании, механизм, подрельсовом, рельсового, элемента, перемещения, фиксации
Формула / Реферат:
Изобретение относится к устройствам железнодорожного пути и предназначено для использования в стрелочных переводах с подвижными рельсовыми элементами, Механизм перемещения и фиксации рельсового элемента на подрельсовом основании содержит привод, тягу привода, тягу рельсового элемента, пластину с фигурным пазом, размещенную в нем подвижную ось соединения тяг. Фигурный паз выполнен Z-образным, продольная ось симметрии его средней части расположена...
Механизм для навешивания орудий
Номер патента: 24
Опубликовано: 10.12.1993
Авторы: Сучков Вениамин Тимофеевич, Филин Сергей Антонович, Буряков Александр Семенович, Уфиркин Николай Александрович, Болендер Вальтер Эдуардович, Акчурин Асхат Харисович, Ниязгулов Хайбулла Хуббулович, Грибановский Анатолий Павлович, Яненко Андрей Андреевич, Бутенко Михаил Сергеевич, Розенфельд Хаим Хаимович, Валов Николай Рафаилович
МПК: A01B 63/10
Метки: навешивания, механизм, орудий
Формула / Реферат:
Изобретение относится к сельскому хозяйству, в частности к передним навесным механизмам тракторов. Цель изобретения - упрощение конструкции. Механизм для навешивания орудий содержит толкающую рамку 1 с ограничителем 7 свободного хода регулируемой тяги 4. Шарнир крепления тяги 4 к орудию 3 расположен выше его центра тяжести. При переводе в транспортное положение при срабатывании регулируемой тяги 4 на втягивание сначала приподнимается перед...
Устройство для съема окислов с поверхности расплава в изложнице
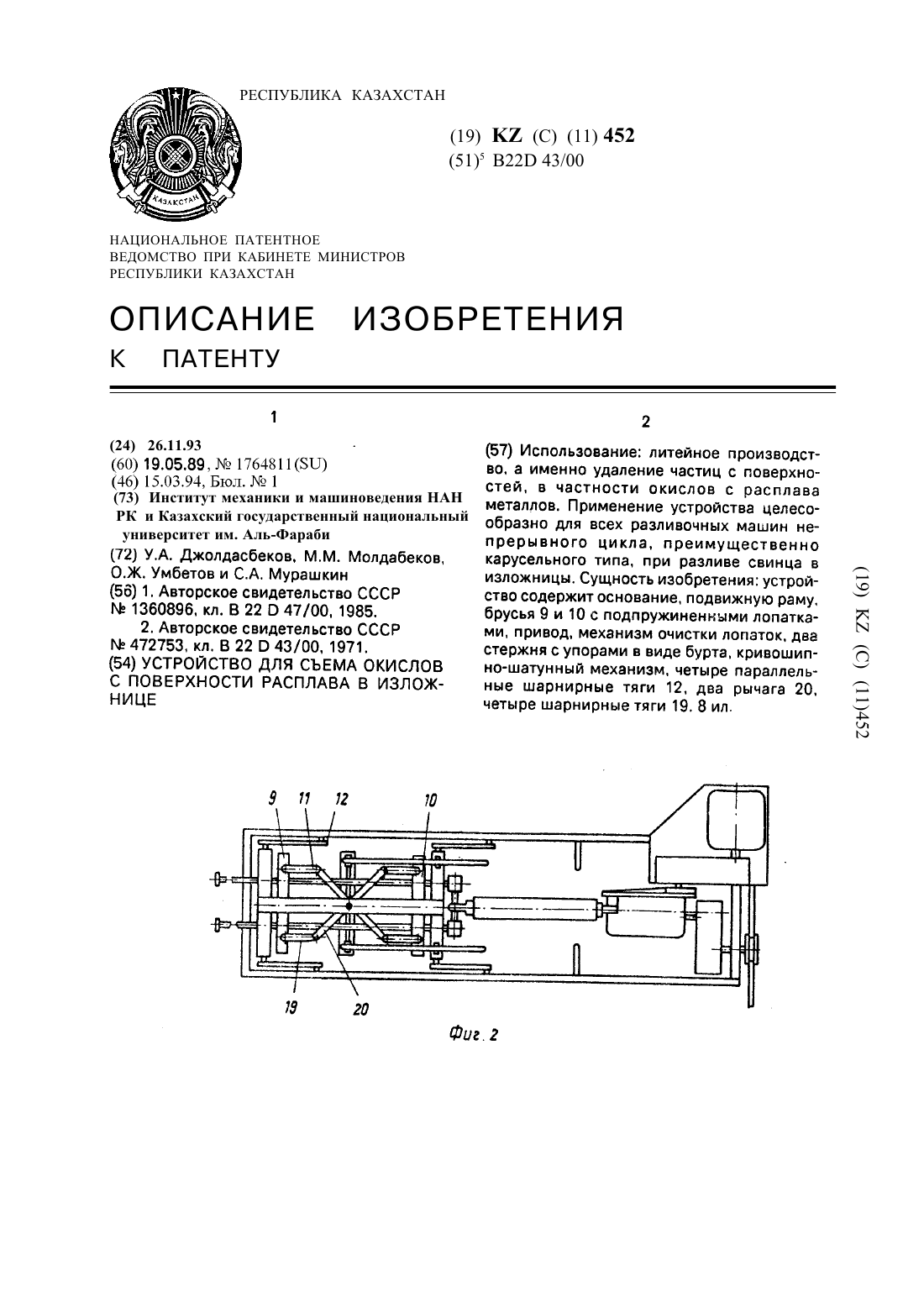
Номер патента: 452
Опубликовано: 15.03.1994
Авторы: Джолдасбеков Умирбек Арсланович, Мурушкин Сергей Александрович, Умбетов Оразбек Жупарбекович, Молдабеков Мейрбек Молдабекович
МПК: B22D 43/00
Метки: изложнице, съема, устройство, расплава, поверхности, окислов
Формула / Реферат:
Использование: литейное производство. а именно удаление частиц с поверхностей, в частности окислов с расплава металлов. Применение устройства целесообразно для всех разливочных машин непрерывного цикла, преимущественно карусельного типа, при разливе свинца в изложницы. Сущность изобретения: устройство содержит основание, подвижную раму, брусья 9 и 10 с подпружиненными лопатками, привод, механизм очистки лопаток, два стержня с упорами в виде...
Предыдущий патент: Стенд для сборки и разборки узлов
Следующий патент: Манипулятор
Случайный патент: Сборно-разборное сооружение