B25J 11/00 — Манипуляторы, не отнесенные к другим рубрикам
Манипулятор SHOLKORS платформенного робота
Номер полезной модели: 1115
Опубликовано: 16.06.2014
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор, робота, sholkors, платформенного
Формула / Реферат:
Полезная модель может применяться в машиностроении, приборостроении, в транспортном машиностроении. Преимущественная область применения там, где требуется управление точной ориентацией и перемещением объектов в пространстве при больших несущих массах, а также - в качестве опор.В конструкцию манипулятора, в котором одна платформа относительно другой имеет шесть управляемых степеней свободы, введены новые конструктивные элементы в виде трехзвенных...
Шарнирный манипулятор шестикоординатного стола
Номер предварительного патента: 19415
Опубликовано: 15.05.2008
Авторы: Шоланов Корганбай Сагнаевич, Кочетков Андрей Анатольевич
МПК: B25J 11/00
Метки: шарнирный, манипулятор, шестикоординатного, стола
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки деталей сложной конфигурации, а также в робототехнике.Для увеличение объема зоны обслуживания и улучшения качественных показателей шарнирный манипулятор шестикоординатного стола, составленный из основания и двух незамкнутых двухподвижных кинематических цепей расположенных в параллельных плоскостях, соединен соединительным звеном....
Одноконтурный параллельный манипулятор
Номер предварительного патента: 19265
Опубликовано: 15.04.2008
Авторы: Сбатаев Еркебулан Мадениетович, Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: одноконтурный, параллельный, манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки деталей сложной конфигурации, а также в робототехнике.Для увеличения объема зоны обслуживания и улучшения качественных показателей в одноконтурном параллельном манипуляторе, составленном из основания и двух незамкнутых двухподвижных кинематических цепей расположен-ных в параллельных плоскостях, последние от основания звенья...
Параллельный манипулятор платформенного типа SHOLKOR 2
Номер предварительного патента: 18893
Опубликовано: 15.11.2007
Авторы: Байтурганова Винера Канапияевна, Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: типа, платформенного, sholkor, параллельный, манипулятор
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественная область использования, там где требуется управление в пространстве ориентацией и перемещением объектов при больших несущих массах, например, в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, для столов многофункциональных станков в машиностроении.В данном изобретении в конструкции манипулятора параллельного платформенного...
Параллельный манипулятор платформенного типа SHOLKOR
Номер предварительного патента: 17442
Опубликовано: 15.06.2006
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: типа, манипулятор, параллельный, платформенного, sholkor
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественной областью применения является использование в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, столов многофункциональных станков в машиностроении.В манипуляторе SHOLKOR предложено новое взаимное расположение узловых точек верхней и нижней платформ и 6 соединительных кинематических цепей. Кинематические...
Манипулятор шестикоординатного стола
Номер предварительного патента: 3430
Опубликовано: 10.06.1996
Авторы: Округин Валерий Григорьевич, Шоланов Корганбай Сагниевич
МПК: B25J 11/00
Метки: шестикоординатного, стола, манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки сложной конфигурации, а также в робототехнике.Технический результат, достигаемый изобретением - повышение грузоподъемности и снижение энергоемкости.Для этого в манипуляторе шестикоординатного стола, составленного из основания и параллельно соединенных двух незамкнутых кинематических цепей, последние от основания звенья которых...
Манипулятор
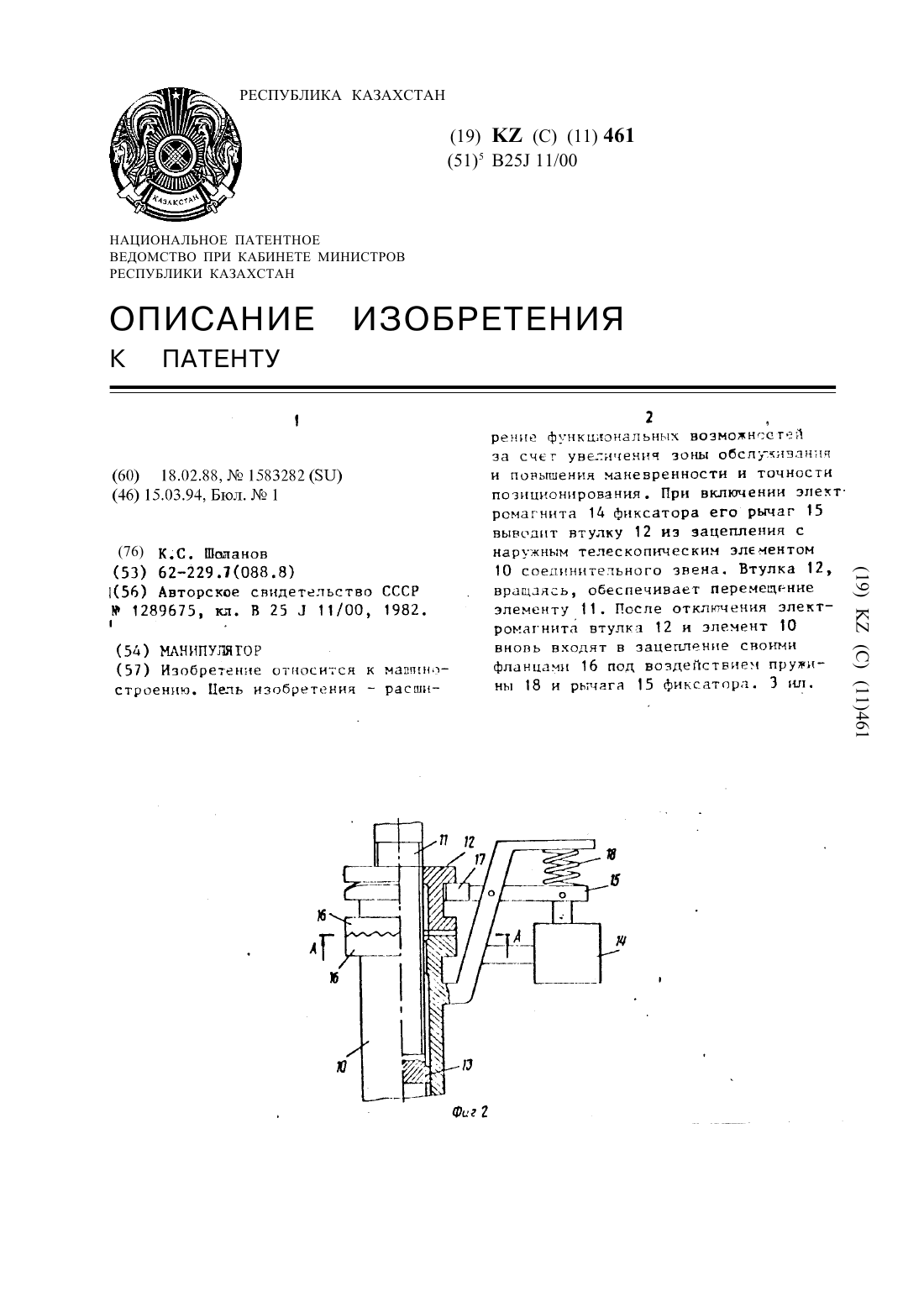
Номер патента: 461
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к машиностроению. Цель изобретения - расширение функциональных возможности за счет увеличения зоны обслуживания и повышения маневренности и точности позиционирования. При включении электромагнита 14 фиксатора его рычаг 15 выводит втулку 12 из зацепления с наружным телескопическим элементом 10 соединительного звена. Втулка 12, вращаясь, обеспечивает перемещение элементу 11. После отключения электромагнита втулка 12 и элемент...
Манипулятор
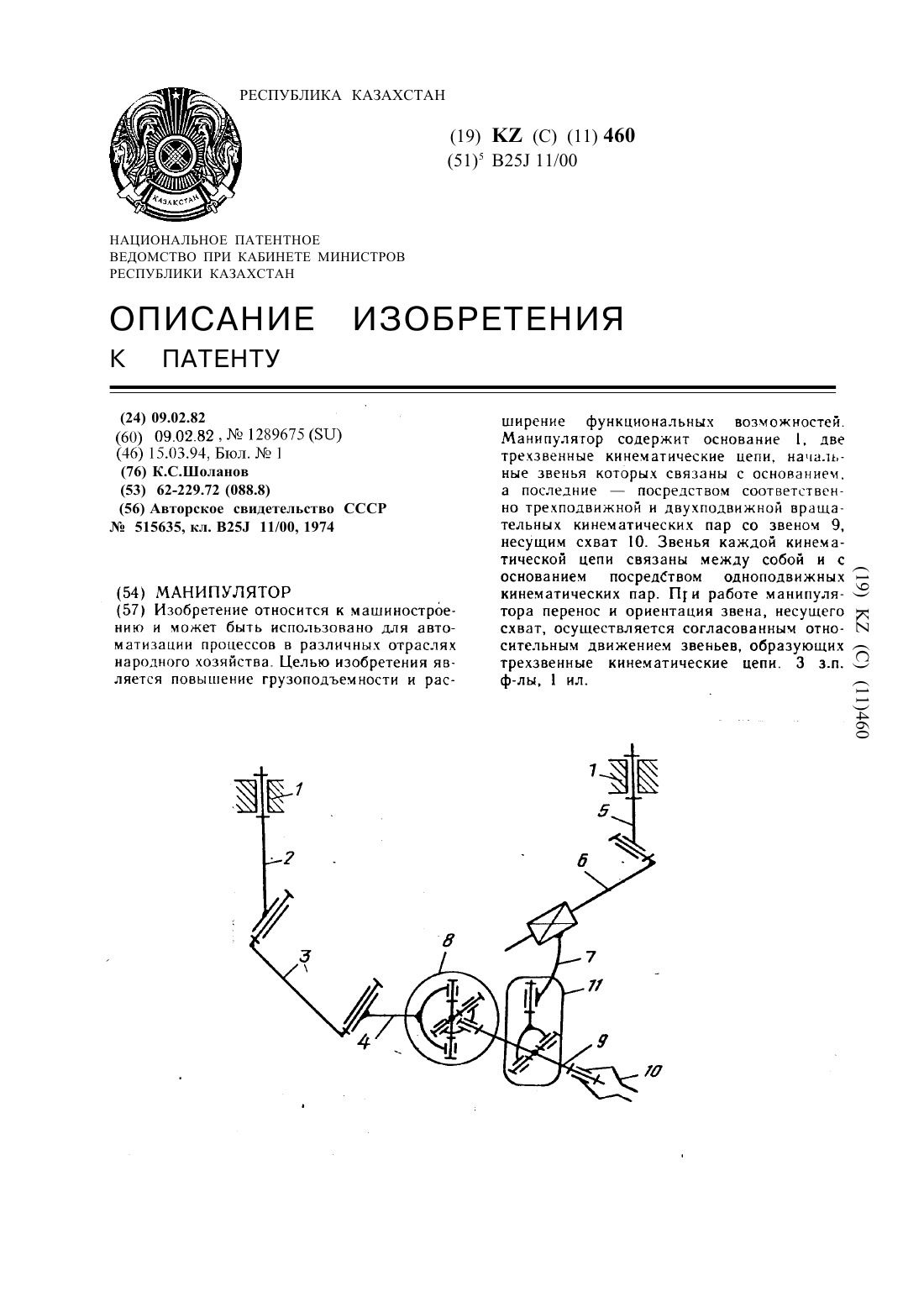
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...