Манипулятор SHOLKORS платформенного робота
Формула / Реферат
Полезная модель может применяться в машиностроении, приборостроении, в транспортном машиностроении. Преимущественная область применения там, где требуется управление точной ориентацией и перемещением объектов в пространстве при больших несущих массах, а также - в качестве опор.
В конструкцию манипулятора, в котором одна платформа относительно другой имеет шесть управляемых степеней свободы, введены новые конструктивные элементы в виде трехзвенных и четырехзвенных сферичесих соединении. Применение этих конструктивных элементов позволяет реализовать функциональные возможности манипулятора, а именно, чтобы: перемещения, выполняемые с помощью приводов, были независимы друг от друга; каждому движению привода соответствовала определённая конфигурация манипулятора; каждой конфигурации манипулятора однозначно соответствовала определённая совокупность обобщённых координат (перемещений выполняемых приводами). Приводы могут иметь различные исполнения.
На примере реальных конструкций многозвенных сферических соединений и манипулятора, потверждены их функциональные возможности.
МАНИПУЛЯТОР SHOLKORS ПЛАТФОРМЕННОГО РОБОТА
МПК / Метки
МПК: B25J 11/00
Метки: sholkors, манипулятор, платформенного, робота
Код ссылки
<a href="https://kz.patents.su/0-u1115-manipulyator-sholkors-platformennogo-robota.html" rel="bookmark" title="База патентов Казахстана">Манипулятор SHOLKORS платформенного робота</a>
Параллельный манипулятор платформенного типа SHOLKOR
Номер предварительного патента: 17442
Опубликовано: 15.06.2006
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: sholkor, платформенного, типа, манипулятор, параллельный
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественной областью применения является использование в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, столов многофункциональных станков в машиностроении.В манипуляторе SHOLKOR предложено новое взаимное расположение узловых точек верхней и нижней платформ и 6 соединительных кинематических цепей. Кинематические...
Параллельный манипулятор платформенного типа SHOLKOR 2
Номер предварительного патента: 18893
Опубликовано: 15.11.2007
Авторы: Байтурганова Винера Канапияевна, Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: платформенного, типа, манипулятор, sholkor, параллельный
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественная область использования, там где требуется управление в пространстве ориентацией и перемещением объектов при больших несущих массах, например, в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, для столов многофункциональных станков в машиностроении.В данном изобретении в конструкции манипулятора параллельного платформенного...
Манипулятор
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
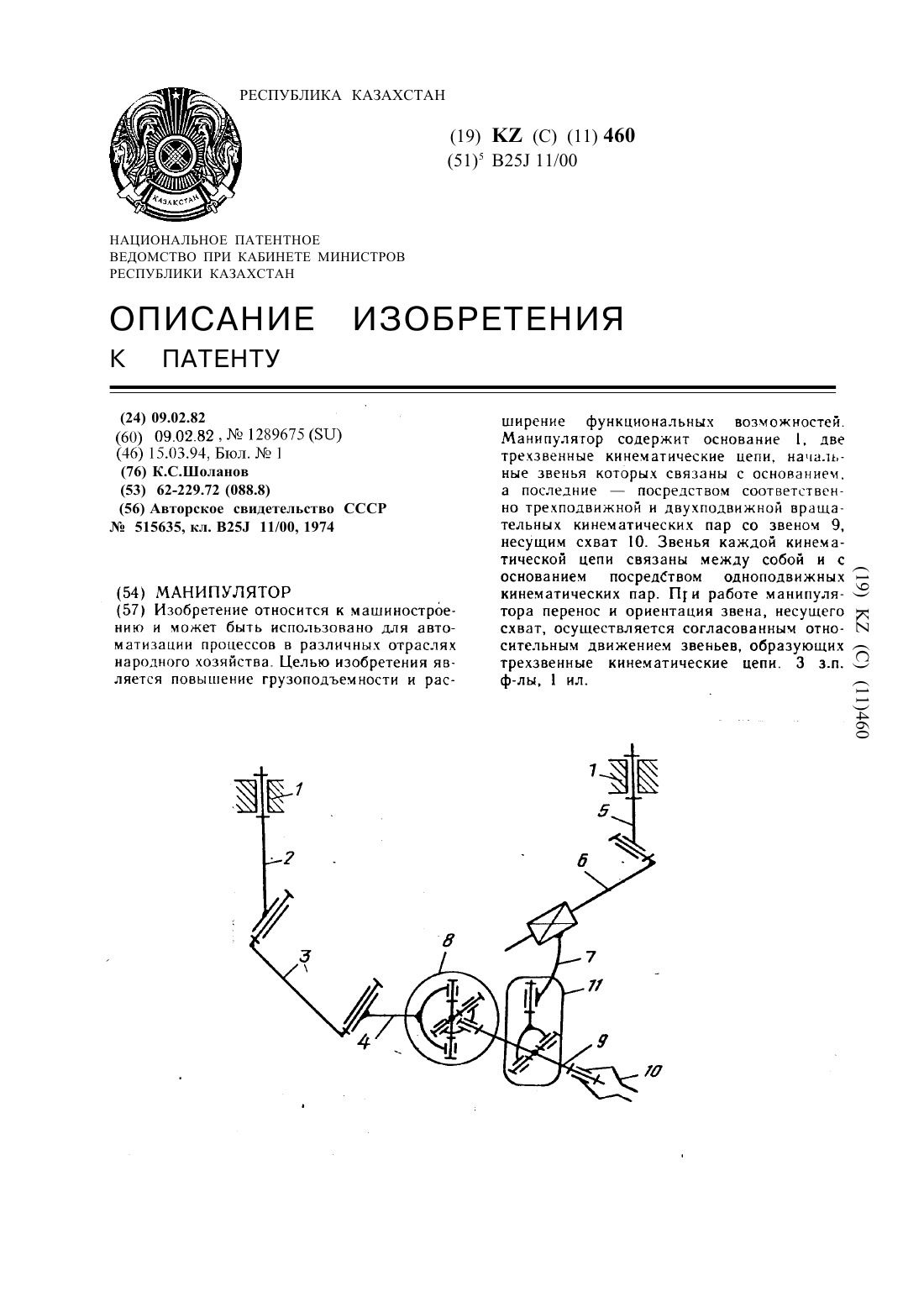
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Система управления приводом робота
Номер предварительного патента: 5616
Опубликовано: 15.12.1997
Авторы: Молдабеков Мейрбек Молдабекович, Кусаинов Бухар Кажикенович, Джолдасбеков Умирбек Арисланович
МПК: G05B 11/01
Метки: робота, приводом, система, управления
Формула / Реферат:
Изобретение относится к автоматическому управлению и может быть использовано при создании систем автоматического управления приводами роботов-манипуляторов.Стабилизация динамических характеристик системы управления приводом с переменной нагрузкой достигается тем, что предлагаемая система управления приводом робота содержит наблюдающее устройство идентификации непрограммируемых изменений момента инерции нагрузки, обусловленных изменениями...
Манипулятор
Номер предварительного патента: 18892
Опубликовано: 15.11.2007
Авторы: Бекетов Галымжан Шакирович, Журсенбаев Балахазы Ибрайович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспорт-ному машиностроению. Манипулятор может использоваться с различными видами рабочего навесного оборудования в различных отраслях хозяйства, может быть применен в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков штабеллеров для валки, пакетирования и погрузки деревьев, с копающим и погрузочным ковшом экскватора - для погрузки сыпучих и навалочных грузов на железнодорожные платформы,...
Предыдущий патент: Способ и устройство для сигнализации распределения кадров передачи соседних сот
Следующий патент: Генератор хаотических колебаний с регулируемой перемежающейся структурой
Случайный патент: Способ стимуляции функционального состояния мозга человека