Параллельный манипулятор платформенного типа SHOLKOR 2
Номер предварительного патента: 18893
Опубликовано: 15.11.2007
Авторы: Байтурганова Винера Канапияевна, Шоланов Корганбай Сагнаевич
Формула / Реферат
Изобретение относится к робототехнике и мехатронике. Преимущественная область использования, там где требуется управление в пространстве ориентацией и перемещением объектов при больших несущих массах, например, в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, для столов многофункциональных станков в машиностроении.
В данном изобретении в конструкции манипулятора параллельного платформенного типа соединительная кинематическая цепь с платформой соединены сферическими соединениями с пальцем, устраняющие лишние подвижности и позволяющие улучшить динамические свойства параллельного манипулятора.
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор, sholkor, параллельный, платформенного, типа
Код ссылки
<a href="https://kz.patents.su/0-pp18893-parallelnyjj-manipulyator-platformennogo-tipa-sholkor-2.html" rel="bookmark" title="База патентов Казахстана">Параллельный манипулятор платформенного типа SHOLKOR 2</a>
Параллельный манипулятор платформенного типа SHOLKOR
Номер предварительного патента: 17442
Опубликовано: 15.06.2006
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: платформенного, sholkor, параллельный, манипулятор, типа
Формула / Реферат:
Изобретение относится к робототехнике и мехатронике. Преимущественной областью применения является использование в качестве платформы для солнечных батарей космических аппаратов, радиолокационных устройств, телескопов, столов многофункциональных станков в машиностроении.В манипуляторе SHOLKOR предложено новое взаимное расположение узловых точек верхней и нижней платформ и 6 соединительных кинематических цепей. Кинематические...
Цифровой частотный манипулятор
Номер патента: 6324
Опубликовано: 16.09.2002
Автор: Попов Анатолий Евгеньевич
МПК: H04L 27/12
Метки: частотный, манипулятор, цифровой
Формула / Реферат:
Изобретение относится к радиотехнике и может быть использовано в системах передачи дискретной информации для формирования частотно-манипулированных сигналов с непрерывной фазой.Технический результат изобретения состоит в том, что предложенное устройство обеспечивает получение непрерывного по фазе, приближенного к синусоидальному ЧМ-сигнала и привязку его фазы к фронтам информационного сигнала, что повышает точность преобразования, улучшает...
Манипулятор
Номер предварительного патента: 18892
Опубликовано: 15.11.2007
Авторы: Журсенбаев Балахазы Ибрайович, Бекетов Галымжан Шакирович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспорт-ному машиностроению. Манипулятор может использоваться с различными видами рабочего навесного оборудования в различных отраслях хозяйства, может быть применен в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков штабеллеров для валки, пакетирования и погрузки деревьев, с копающим и погрузочным ковшом экскватора - для погрузки сыпучих и навалочных грузов на железнодорожные платформы,...
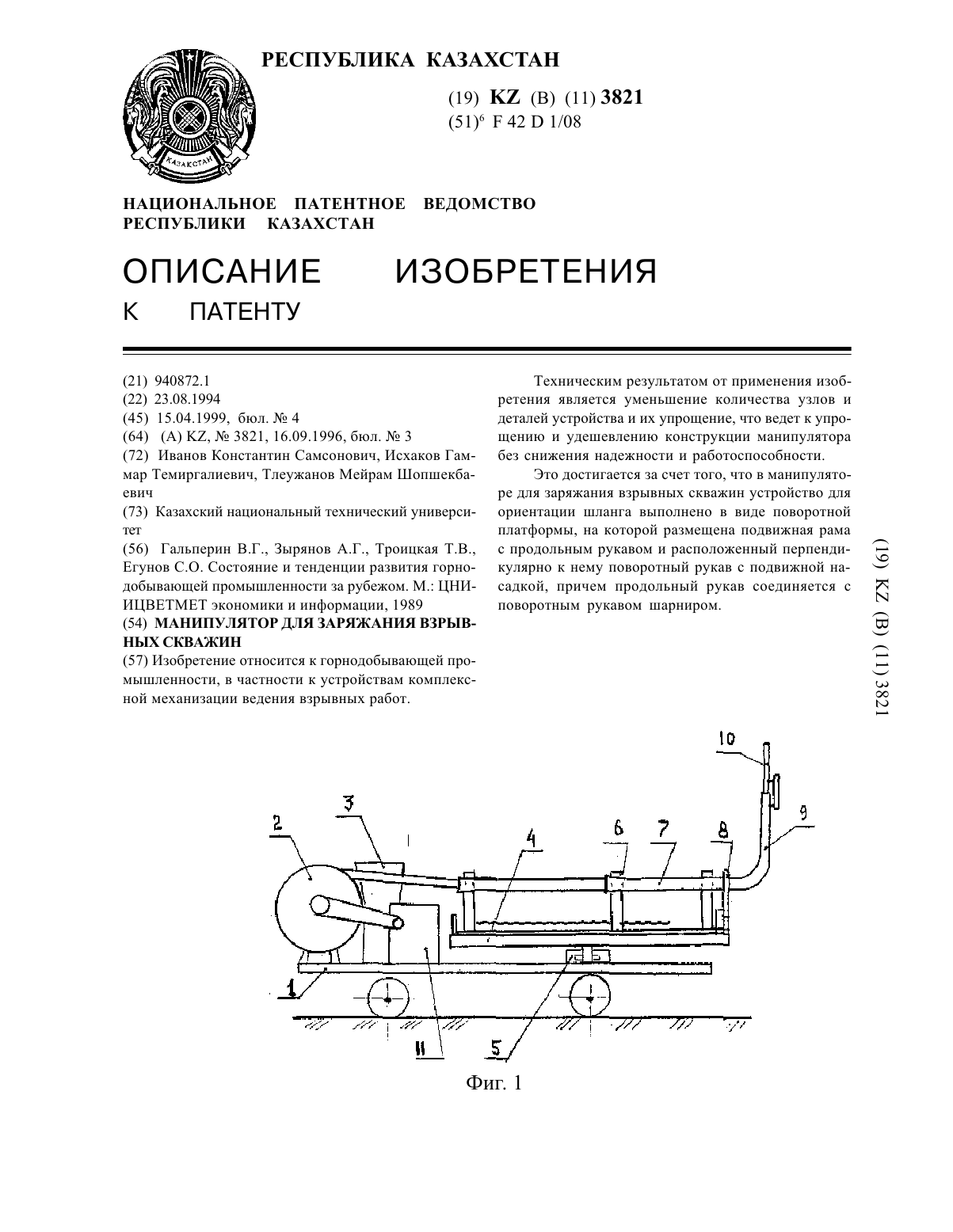
Манипулятор для заряжания взрывных скважин
Номер патента: 3821
Опубликовано: 15.04.1999
Авторы: Исхаков Гаммар Темиргалиевич, Тлеужанов Мейрам Шопшекбаевич, Иванов Константин Самсонович
МПК: F42D 1/08
Метки: манипулятор, заряжания, скважин, взрывных
Формула / Реферат:
Изобретение относится к горнодобывающей промышленности, в частности, к устройству комплексной механизации ведения взрывных работ.Техническим результатом от применения изобретения является уменьшение количества узлов и деталей устройства и их упрощение. Это ведет к упрощению и удешевлению конструкции манипулятора без снижения надежности и работоспособности.Технический результат достигается за счет того, что в манипуляторе для заряжания взрывных...
Манипулятор
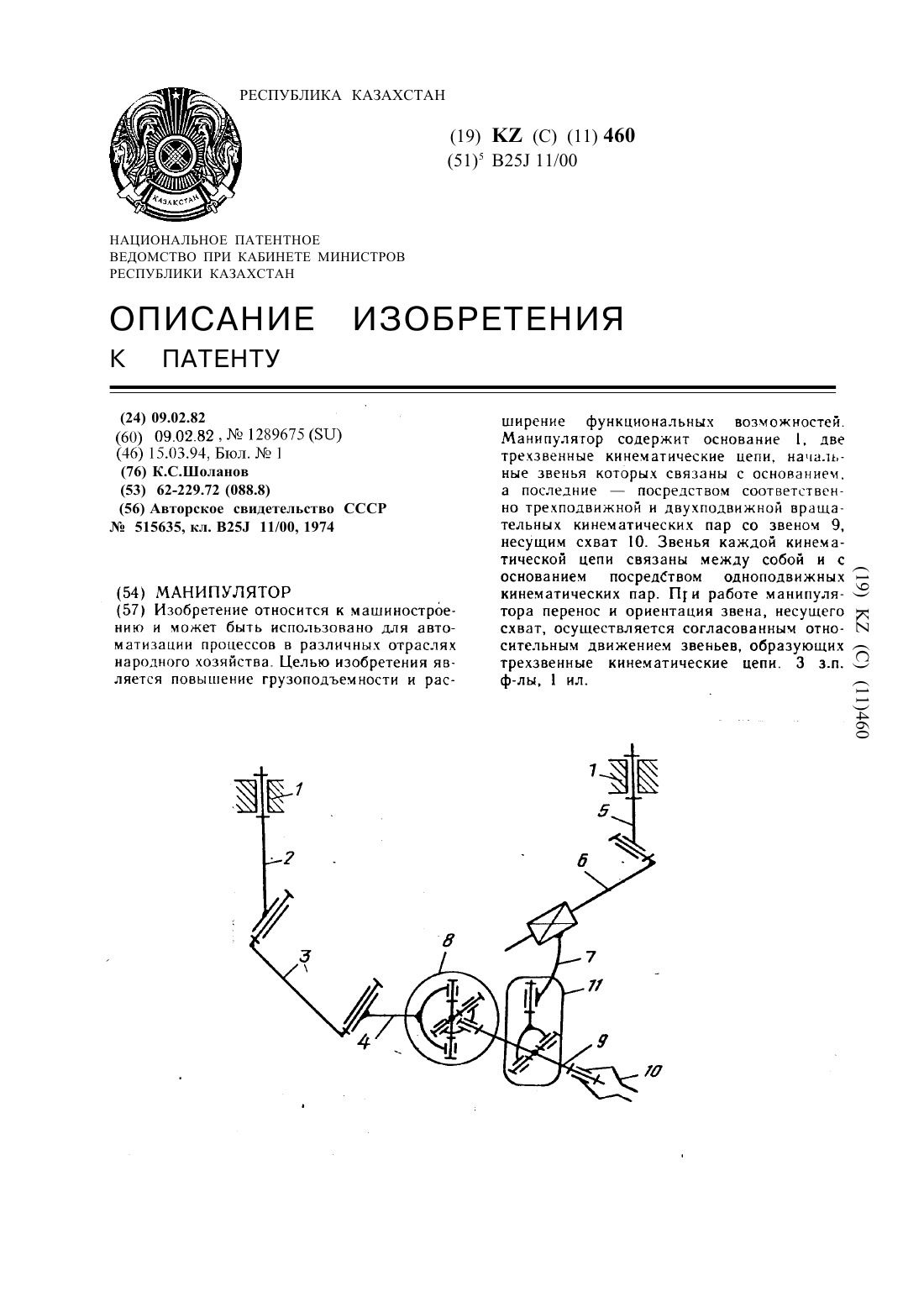
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Предыдущий патент: Стабилизированные препараты бривудина для местного применения
Следующий патент: Набор режущих предметов для карвинга