Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 9429
Опубликовано: 15.09.2000
Авторы: Жумашева Жадыра Токановна, Байгунчеков Жумадил Жанабаевич, Гилл Радж, Уайт Антони, Байгунчеков Нурлан Жумадилович, Чанмугам Раймунд
Формула / Реферат
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных и погрузочно-разгрузочных работ.
Техническим результатом изобретения является уменьшение массы манипулятора, увеличение его надежности и срока службы, упрощение системы управления за счет функционального разделения работы приводов.
Это достигается тем, что в исполнительном механизме параллельного манипулятора, содержащем треугольную стойку с тремя шарнирами, платформу с шарнирами, причем шарниры стойки соединены с шарнирами платформы, и ведущие звенья с приводами, платформа выполнена в виде четырехугольника с тремя шарнирными вершинами и четвертой вершиной, являющейся рабочей точкой, соединения между платформой и стойкой выполнены в виде трех двухзвенных пространственных кинематических цепей, причем два звена первой пространственной кинематической цепи соединены между собой и с вершиной платформы шарнирами, создающими вращательные пары, а звенья второй и третьей пространственных кинематических цепей соединены между собой и с вершинами платформы сферическими шарнирами.
МПК / Метки
МПК: B25J 9/04, G05G 11/00
Метки: манипулятора, механизм, параллельного, исполнительный
Код ссылки
<a href="https://kz.patents.su/0-pp9429-ispolnitelnyjj-mehanizm-parallelnogo-manipulyatora.html" rel="bookmark" title="База патентов Казахстана">Исполнительный механизм параллельного манипулятора</a>
Исполнительный механизм декартова манипулятора
Номер предварительного патента: 9089
Опубликовано: 15.06.2000
Автор: Ибраев Саят Мурат-улы
Метки: механизм, исполнительный, манипулятора, декартова
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является повышение надежности и КПД работы исполнительного механизма декартова манипулятора.Это достигается тем, что в известной конструкции, содержащей стойку, первое и второе ведущие звенья, первое, второе, третье и четвертое шарнирно сочлененные ведомые рычажные звенья, из...
Пространственный исполнительный механизм робота
Номер предварительного патента: 9242
Опубликовано: 14.07.2000
Авторы: Канлыбаева Марфуга Оразалыевна, Балахметов Болат Кажахметович, Канлыбаев Оразалы
МПК: B25J 9/00
Метки: робота, механизм, исполнительный, пространственный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного исполнительного механизма робота, расположенного во взаимно перпендикулярных плоскостях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений одновременную работу с тремя объектами в трехмерном...
Манипулятор шестикоординатного стола
Номер предварительного патента: 3430
Опубликовано: 10.06.1996
Авторы: Шоланов Корганбай Сагниевич, Округин Валерий Григорьевич
МПК: B25J 11/00
Метки: манипулятор, шестикоординатного, стола
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в лазерной технологии, станкостроении для обработки сложной конфигурации, а также в робототехнике.Технический результат, достигаемый изобретением - повышение грузоподъемности и снижение энергоемкости.Для этого в манипуляторе шестикоординатного стола, составленного из основания и параллельно соединенных двух незамкнутых кинематических цепей, последние от основания звенья которых...
Манипулятор
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
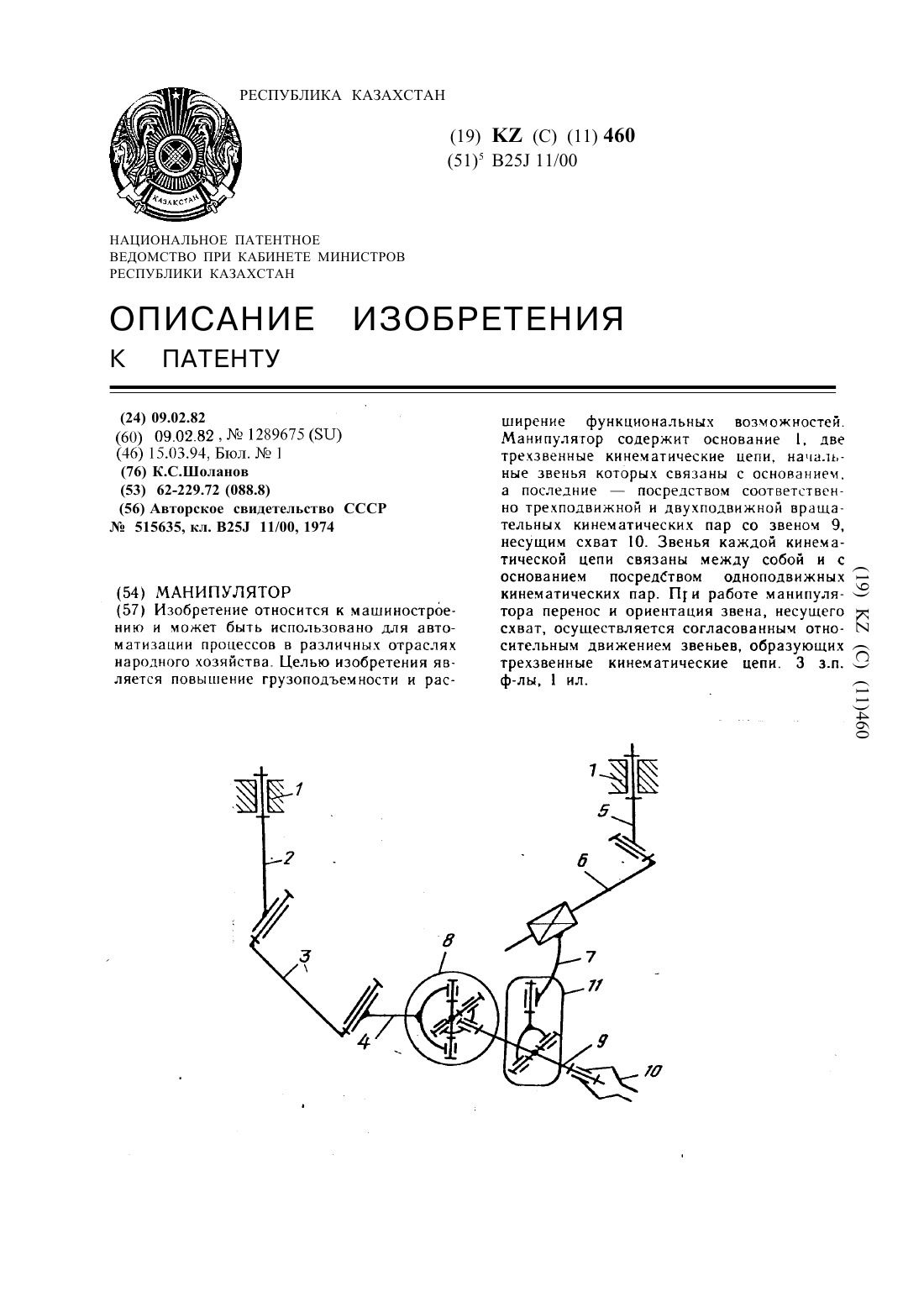
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Способ управления рабочим органом манипулятора для термической обработки твердых горных пород и устройство для его осуществления
Номер предварительного патента: 6765
Опубликовано: 15.12.1998
Авторы: Поветкин Виталий Васильевич, Алтынов Жархын Лесович, Джиенкулов Сергазы Ахметович
МПК: B28D 1/30
Метки: горных, термической, рабочим, пород, органом, устройство, управления, манипулятора, обработки, твердых, способ, осуществления
Формула / Реферат:
Изобретения относятся к камнеобрабатывающей промышленности и предназначены для пространственной обработки поверхностей каменных изделий автоматизированным способом.Техническим результатом изобретений является саморегулирование манипулятора.Это достигается тем, что в способе управления рабочим органом, включающем сканирование поверхности, предназначенной к обработке, сравнение полученной информации, характеризующей уровень поверхности, с...
Предыдущий патент: Камнеотделительная машина
Следующий патент: Водка “Елшiлiк”
Случайный патент: Способ получения силикомарганца с барием