B25J 9/00 — Манипуляторы с программным управлением
Робот телеприсутствия
Номер полезной модели: 1324
Опубликовано: 15.09.2015
Автор: Калиаскаров Нургожа Арманович
МПК: B25J 9/00
Метки: телеприсутствия, робот
Формула / Реферат:
Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия.Техническим результатом является повышение скорости манипуляции, высокая скорость передвижения, износостойкость компонентов робота.Это достигается тем, что робот телеприсутствия, включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей...
Универсальное роботизированное транспортное средство
Номер полезной модели: 1271
Опубликовано: 15.06.2015
Авторы: Кальменов Тынысбек Шарипович, Хачикян Владислав Саркисович, Байжанов Бектур Сембиулы, Мендакулов Жасулан Корабаевич, Крымусь Евгений Георгиевич
Метки: роботизированное, универсальное, транспортное, средство
Формула / Реферат:
Универсальное роботизированное транспортное средствоПолезная модель относится к робототехнике, в частности к системам, предназначенным для дистанционного перемещения предметов и грузов, сбора данных и может быть использовано в работах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения и уничтожения взрывоопасных устройств, доставки в заданный район специального оборудования, а также при проведении взры вотех н и ч...
Испольнительный механизм робота с двумя схватами
Номер инновационного патента: 29603
Опубликовано: 16.03.2015
Авторы: Измамбетов Мырзабай Базарбаевич, Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович
МПК: B25J 9/00
Метки: робота, двумя, схватами, исполнительный, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является расширение зоны обслуживания и технологической возможности выбора траекторий при координации движения двух захватов манипулятора.Исполнительный механизм...
Исполнительный механизм робота с двумя схватами
Номер инновационного патента: 29602
Опубликовано: 16.03.2015
Авторы: Нурлаев Жаркынбек Анарбекович, Байгунчеков Жумадил Жанабаевич, Торгаев Рымбек Агимбаевич, Байгунчеков Нурлан Жумадилович, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робота, схватами, механизм, двумя, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является расширение технологической возможности выбора траекторий при координации движения двух схватов робота.Исполнительный механизм робота, содержащий стойку,...
Исполнительный механизм робота с двумя схватами
Номер инновационного патента: 29601
Опубликовано: 16.03.2015
Авторы: Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робота, схватами, исполнительный, двумя, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.Техническим результатом является значительное упрощение управления исполнительным механизмом робота при координации движения двух схватов.Исполнительный механизм робота, содержащий...
Мобильный робототехнический комплекс с управлением на основе искусственного интеллекта
Номер инновационного патента: 28438
Опубликовано: 15.05.2014
Авторы: Атанов Сабыржан Кубейсинович, Ибраева Айгерим Кайруллаевна
МПК: B25J 9/00
Метки: комплекс, робототехнический, интеллекта, искусственного, управлением, основе, мобильный
Формула / Реферат:
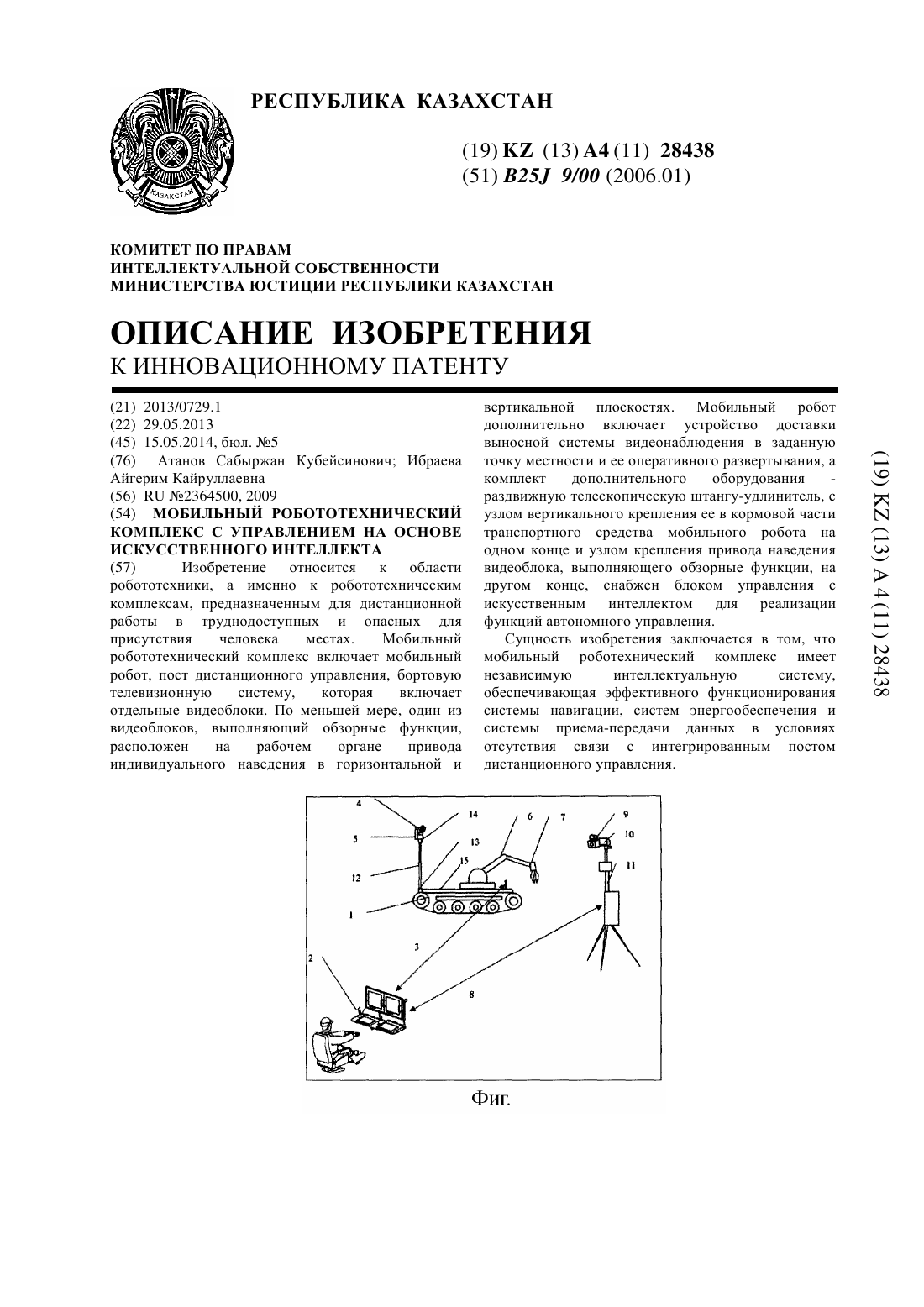
МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С УПРАВЛЕНИЕМ НА ОСНОВЕ ИСКУССТВЕННОГО ИНТЕЛЛЕКТАИзобретение относится к области робототехники, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. По...
Пространственный регулируемый исполнительный механизм робота
Номер патента: 12175
Опубликовано: 15.03.2006
Автор: Канлыбаев Оразалы
МПК: B25J 9/00
Метки: робота, регулируемый, механизм, пространственный, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного регулируемого исполнительного механизма робота, расположенного на взаимно перпендикулярных осях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений, позицирование объектами различных конфигураций и...
Исполнительный механизм манипулятора
Номер предварительного патента: 9980
Опубликовано: 15.03.2001
Авторы: Радж Гилл, Абдрашев Саттар Жусупович, Жумашева Жадыра Токановна, Садыков Женис Абжанович, Байгунчеков Жумадил Жанабаевич, Нурахметов Бауржан Кумаргалиевич, Антони Уайт, Байгунчеков Нурлан Жумадилович
МПК: B25J 9/00
Метки: манипулятора, исполнительный, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных монтажных работ.Техническим результатом является обеспечение координации движения двух рабочих точек манипулятора, повышение его грузоподъемности и точности позиционирования. Исполнительный механизм манипулятора, содержащий стойку, три звена, соединенные между собой вращательными шарнирами в кинематическую цепь с рабочей точкой в третьем звене, начало...
Пространственный исполнительный механизм робота
Номер предварительного патента: 9242
Опубликовано: 14.07.2000
Авторы: Балахметов Болат Кажахметович, Канлыбаев Оразалы, Канлыбаева Марфуга Оразалыевна
МПК: B25J 9/00
Метки: робота, исполнительный, пространственный, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного исполнительного механизма робота, расположенного во взаимно перпендикулярных плоскостях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений одновременную работу с тремя объектами в трехмерном...
Исполнительный механизм декартова манипулятора
Номер предварительного патента: 9089
Опубликовано: 15.06.2000
Автор: Ибраев Саят Мурат-улы
Метки: исполнительный, декартова, манипулятора, механизм
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является повышение надежности и КПД работы исполнительного механизма декартова манипулятора.Это достигается тем, что в известной конструкции, содержащей стойку, первое и второе ведущие звенья, первое, второе, третье и четвертое шарнирно сочлененные ведомые рычажные звенья, из...
Устройство для автоматического управления роботом-манипулятором
Номер предварительного патента: 2967
Опубликовано: 15.03.1996
Авторы: Кусаинов Бухар Кажикенович, Молдабеков Мейирбек Молдабекович, Джолдасбеков Умирбек Арисланович
МПК: B25J 9/00
Метки: роботом-манипулятором, устройство, автоматического, управления
Формула / Реферат:
Предлагаемое устройство для автоматического управления роботом-манипулятором обеспечивает оптимизацию быстродействия и демпфирования его исполнительной системы управления при любых полезных нагрузках и любых радиусах переноса полезного груза. Для этого привод вращения звена манипулятора содержит регулятор положения, регулятор обратной связи по скорости, элемент сравнения, блок вычисления момента инерции вращающихся частей. Автоматическое...
Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Джолдасбеков Умирбек Арисланович, Слуцкий Леонид Иосифович, Джамалов Нутпулла Камалович, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робот, промышленный
Формула / Реферат:
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно...