Робот телеприсутствия
Формула / Реферат
Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия.
Техническим результатом является повышение скорости манипуляции, высокая скорость передвижения, износостойкость компонентов робота.
Это достигается тем, что робот телеприсутствия, включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей секционные панели, при этом нижняя секционная панель снабжена колесным приводом и источником питания, центральная секционная панель снабжена подъемным механизмом и манипулятором, снабженным сервоприводами и оснащенным механизмом захвата, а верхняя секционная панель снабжена экраном, динамиками, микрофоном и камерой.
Текст
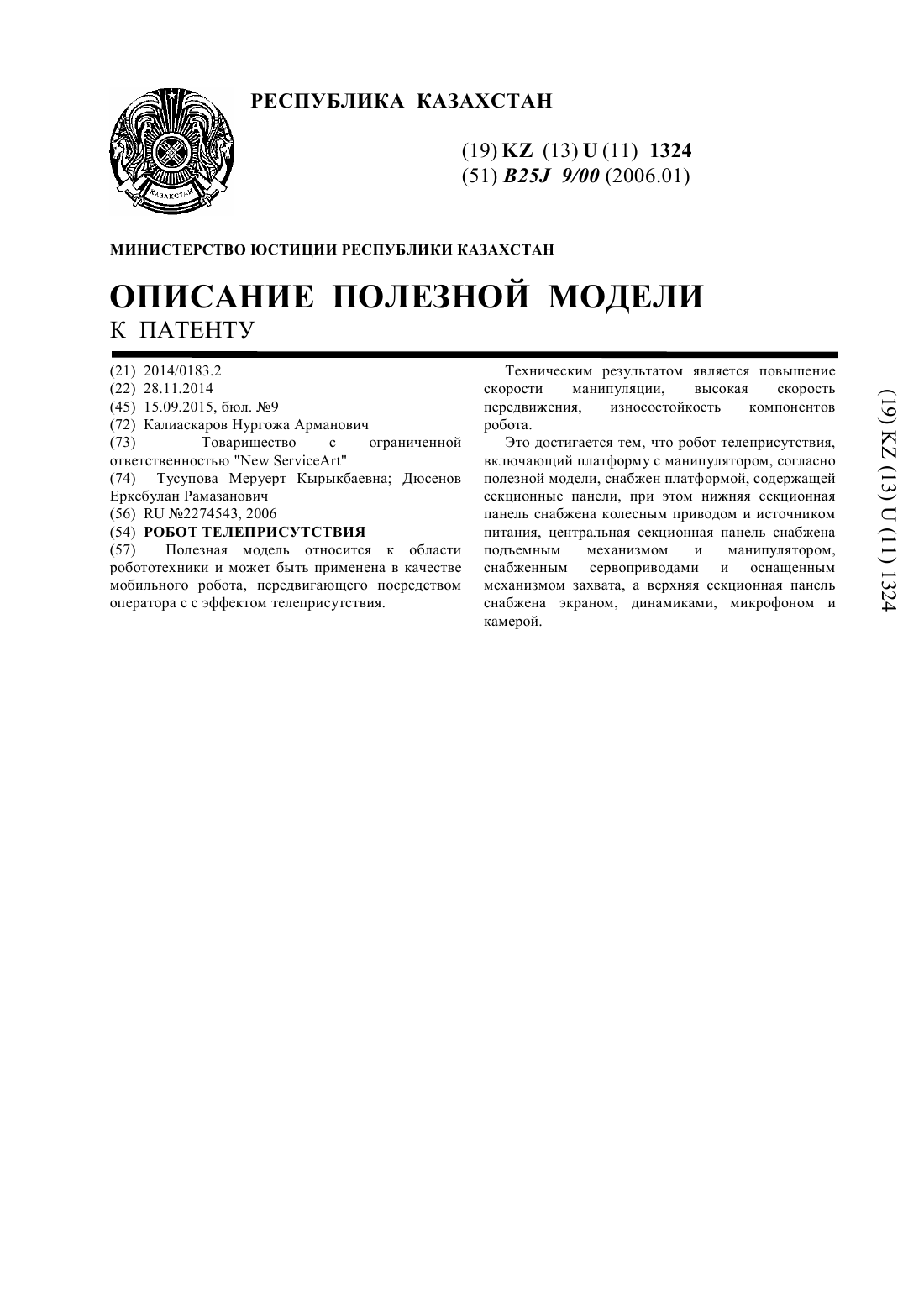
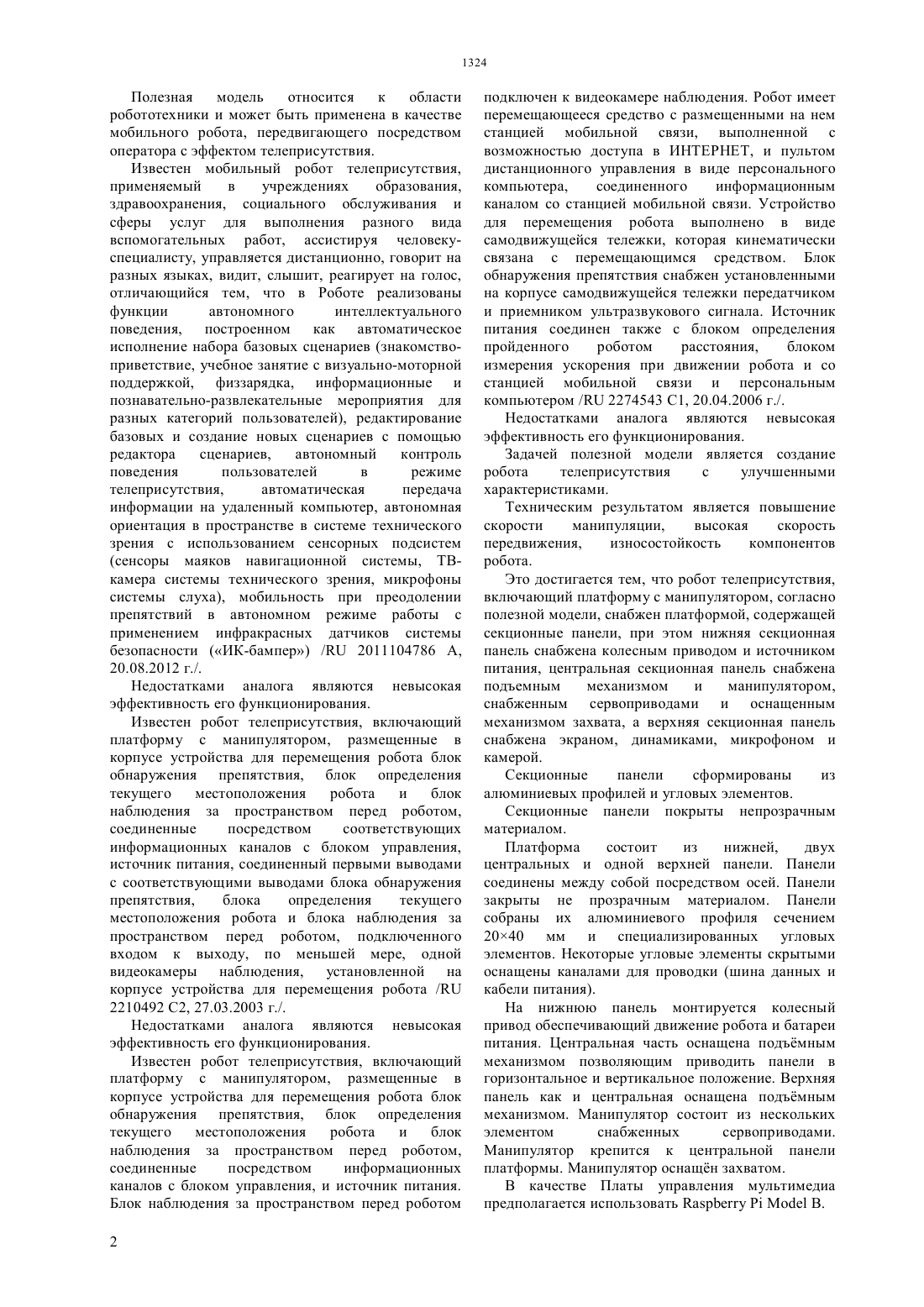
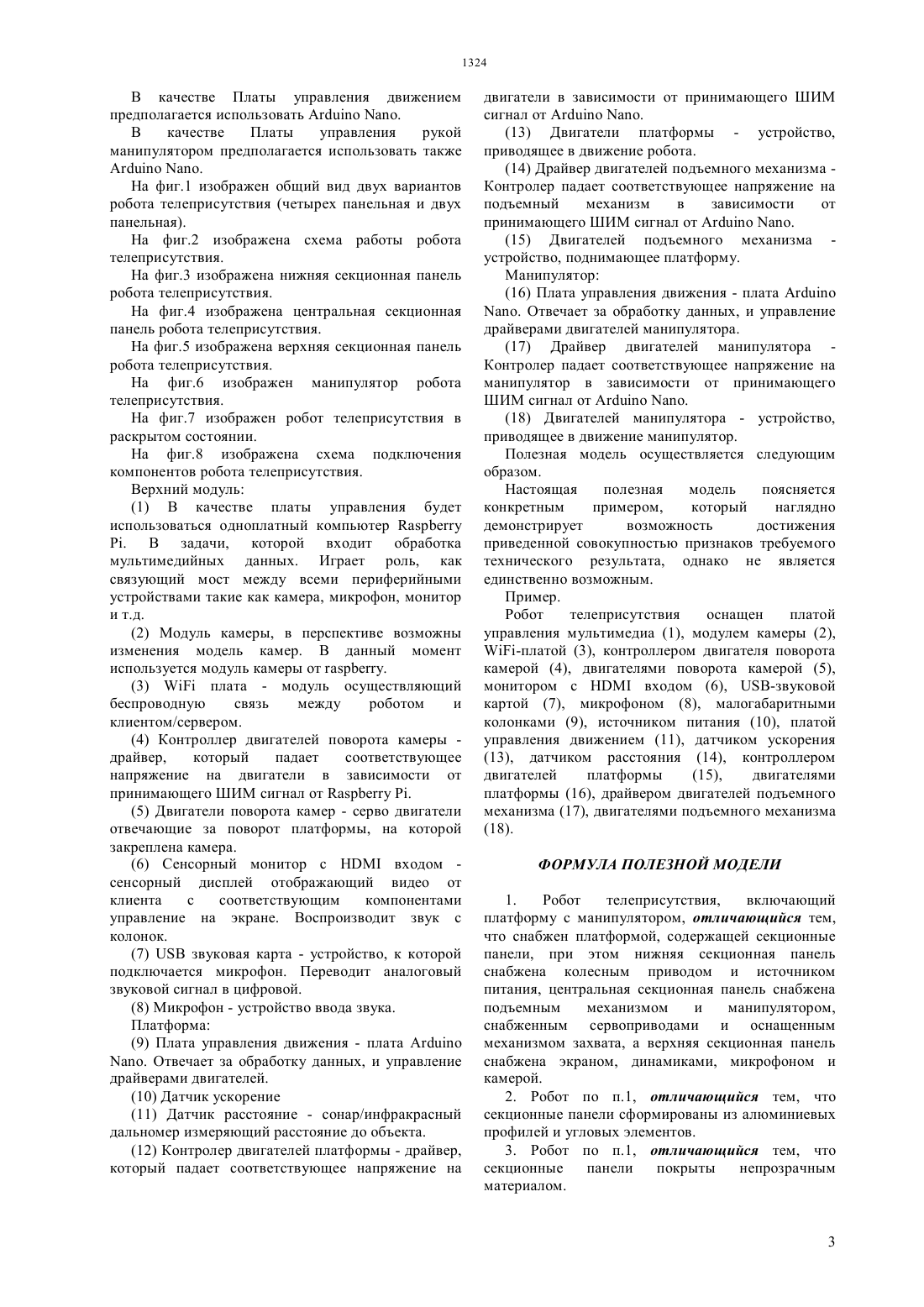
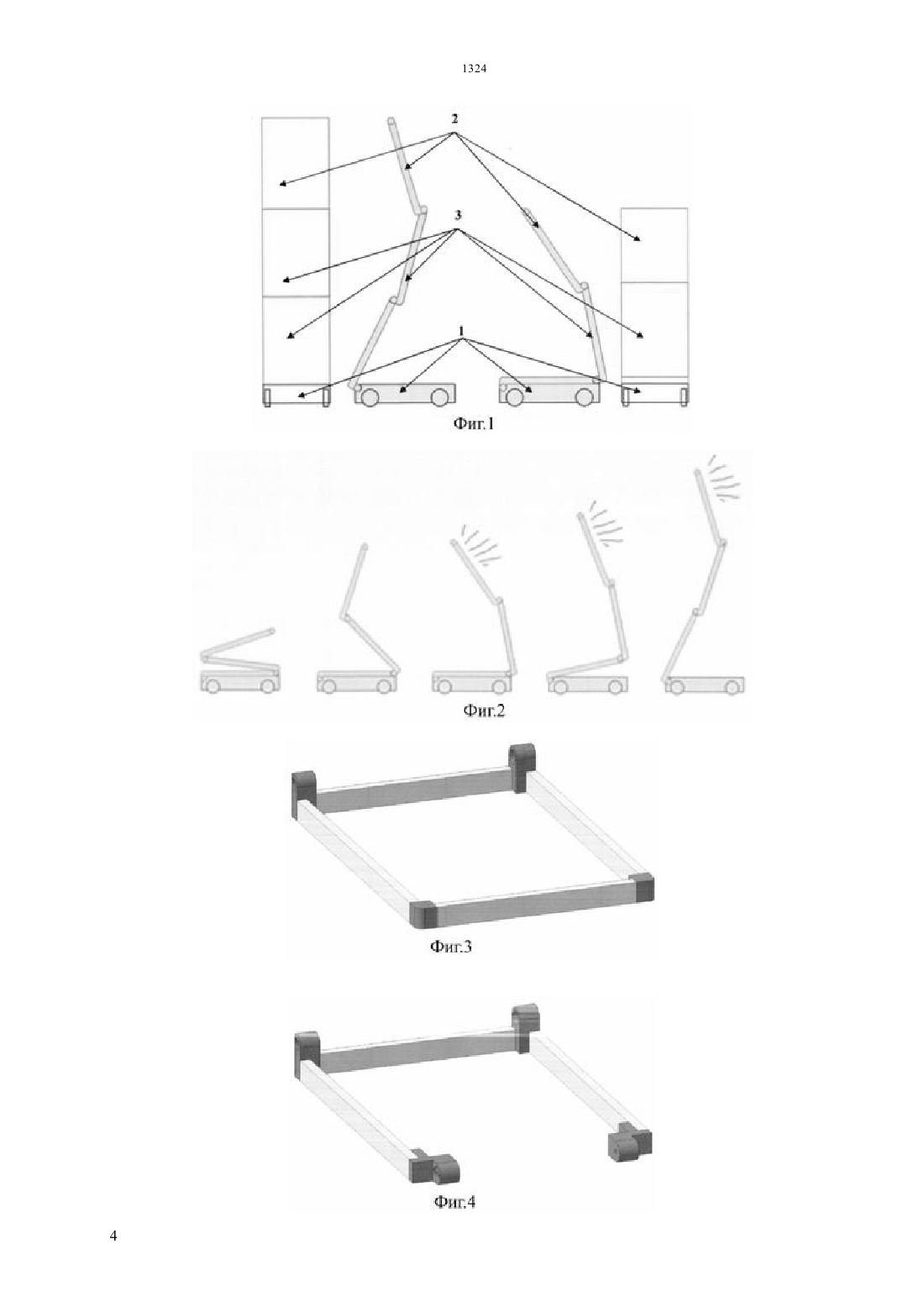
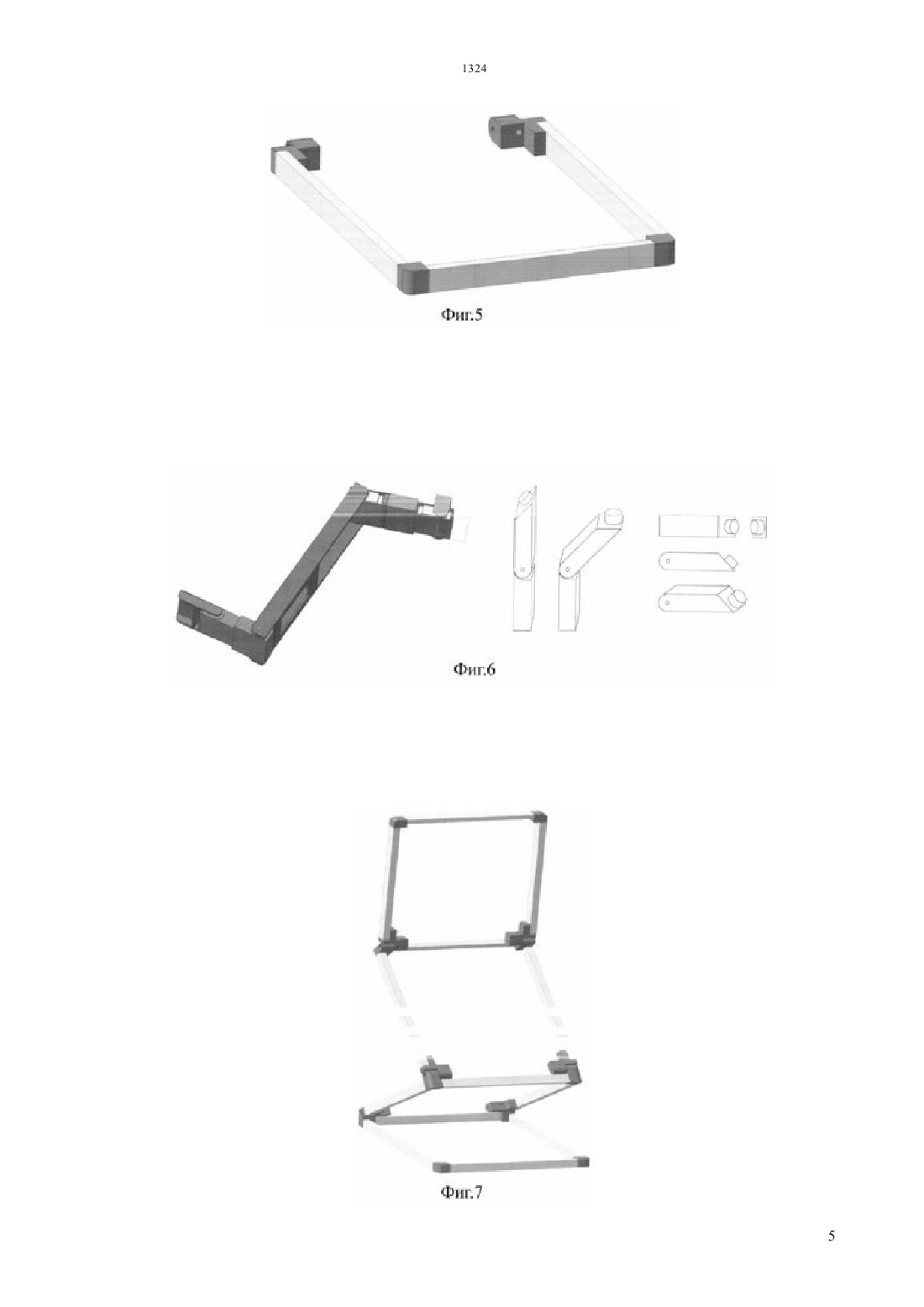
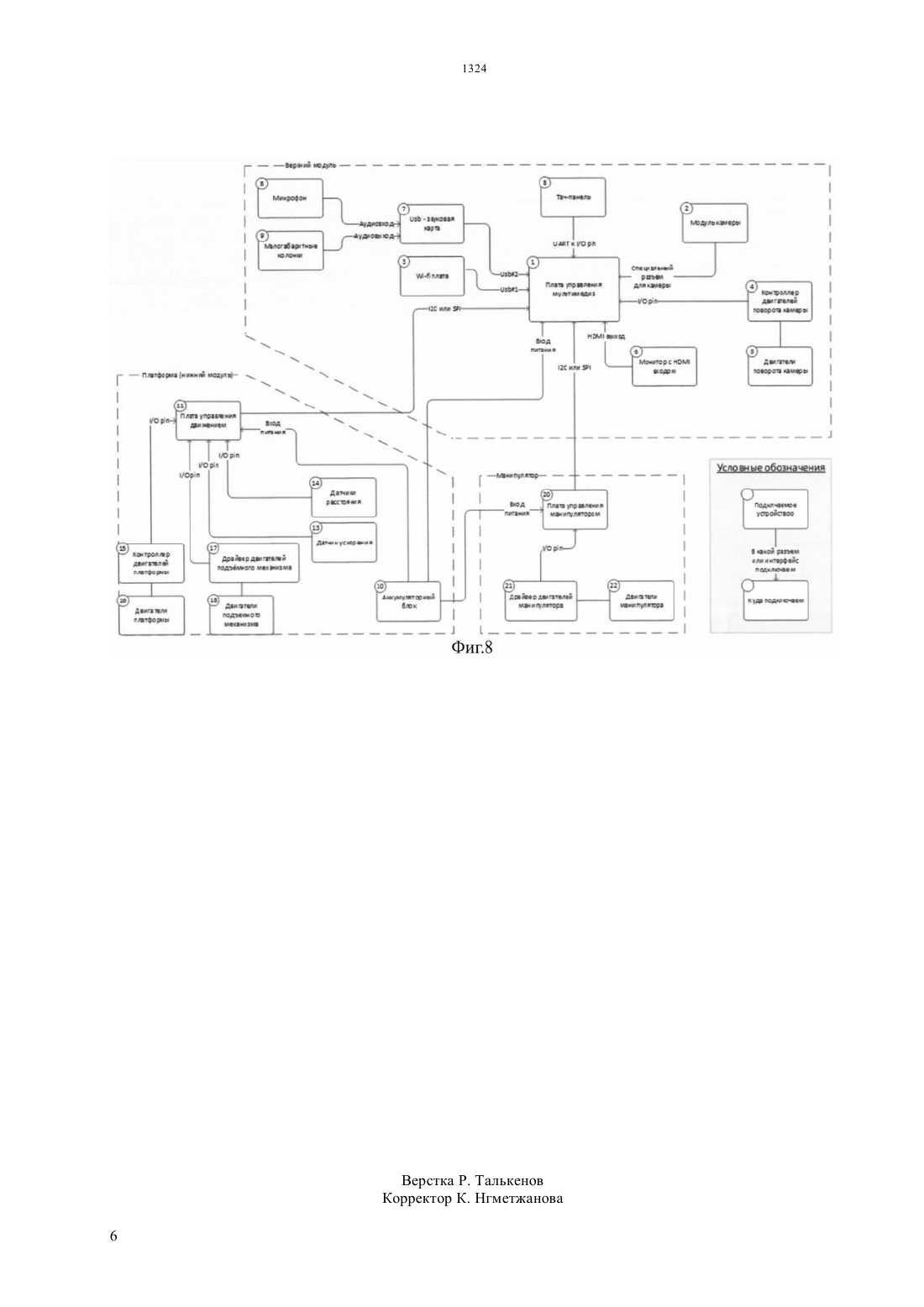
МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ Техническим результатом является повышение скорости манипуляции,высокая скорость передвижения,износостойкость компонентов робота. Это достигается тем, что робот телеприсутствия,включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей секционные панели, при этом нижняя секционная панель снабжена колесным приводом и источником питания, центральная секционная панель снабжена подъемным механизмом и манипулятором,снабженным сервоприводами и оснащенным механизмом захвата, а верхняя секционная панель снабжена экраном, динамиками, микрофоном и камерой.(74) Тусупова Меруерт Кырыкбаевна Дюсенов Еркебулан Рамазанович(57) Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия. Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с эффектом телеприсутствия. Известен мобильный робот телеприсутствия,применяемый в учреждениях образования,здравоохранения, социального обслуживания и сферы услуг для выполнения разного вида вспомогательных работ, ассистируя человекуспециалисту, управляется дистанционно, говорит на разных языках, видит, слышит, реагирует на голос,отличающийся тем, что в Роботе реализованы функции автономного интеллектуального поведения, построенном как автоматическое исполнение набора базовых сценариев (знакомствоприветствие, учебное занятие с визуально-моторной поддержкой, физзарядка, информационные и познавательно-развлекательные мероприятия для разных категорий пользователей), редактирование базовых и создание новых сценариев с помощью редактора сценариев,автономный контроль поведения пользователей в режиме телеприсутствия,автоматическая передача информации на удаленный компьютер, автономная ориентация в пространстве в системе технического зрения с использованием сенсорных подсистем(сенсоры маяков навигационной системы, ТВкамера системы технического зрения, микрофоны системы слуха), мобильность при преодолении препятствий в автономном режиме работы с применением инфракрасных датчиков системы безопасности (ИК-бампер) / 2011104786 А,20.08.2012 г./. Недостатками аналога являются невысокая эффективность его функционирования. Известен робот телеприсутствия, включающий платформу с манипулятором, размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом,соединенные посредством соответствующих информационных каналов с блоком управления,источник питания, соединенный первыми выводами с соответствующими выводами блока обнаружения препятствия,блока определения текущего местоположения робота и блока наблюдения за пространством перед роботом, подключенного входом к выходу, по меньшей мере, одной видеокамеры наблюдения, установленной на корпусе устройства для перемещения робота / 2210492 С 2, 27.03.2003 г./. Недостатками аналога являются невысокая эффективность его функционирования. Известен робот телеприсутствия, включающий платформу с манипулятором, размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом,соединенные посредством информационных каналов с блоком управления, и источник питания. Блок наблюдения за пространством перед роботом 2 подключен к видеокамере наблюдения. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в ИНТЕРНЕТ, и пультом дистанционного управления в виде персонального компьютера,соединенного информационным каналом со станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством. Блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки передатчиком и приемником ультразвукового сигнала. Источник питания соединен также с блоком определения пройденного роботом расстояния,блоком измерения ускорения при движении робота и со станцией мобильной связи и персональным компьютером / 2274543 С 1, 20.04.2006 г./. Недостатками аналога являются невысокая эффективность его функционирования. Задачей полезной модели является создание робота телеприсутствия с улучшенными характеристиками. Техническим результатом является повышение скорости манипуляции,высокая скорость передвижения,износостойкость компонентов робота. Это достигается тем, что робот телеприсутствия,включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей секционные панели, при этом нижняя секционная панель снабжена колесным приводом и источником питания, центральная секционная панель снабжена подъемным механизмом и манипулятором,снабженным сервоприводами и оснащенным механизмом захвата, а верхняя секционная панель снабжена экраном, динамиками, микрофоном и камерой. Секционные панели сформированы из алюминиевых профилей и угловых элементов. Секционные панели покрыты непрозрачным материалом. Платформа состоит из нижней,двух центральных и одной верхней панели. Панели соединены между собой посредством осей. Панели закрыты не прозрачным материалом. Панели собраны их алюминиевого профиля сечением 2040 мм и специализированных угловых элементов. Некоторые угловые элементы скрытыми оснащены каналами для проводки (шина данных и кабели питания). На нижнюю панель монтируется колесный привод обеспечивающий движение робота и батареи питания. Центральная часть оснащена подъмным механизмом позволяющим приводить панели в горизонтальное и вертикальное положение. Верхняя панель как и центральная оснащена подъмным механизмом. Манипулятор состоит из нескольких элементом снабженных сервоприводами. Манипулятор крепится к центральной панели платформы. Манипулятор оснащн захватом. В качестве Платы управления мультимедиа предполагается использоватьВ. В качестве Платы управления движением предполагается использовать. В качестве Платы управления рукой манипулятором предполагается использовать также. На фиг.1 изображен общий вид двух вариантов робота телеприсутствия (четырех панельная и двух панельная). На фиг.2 изображена схема работы робота телеприсутствия. На фиг.3 изображена нижняя секционная панель робота телеприсутствия. На фиг.4 изображена центральная секционная панель робота телеприсутствия. На фиг.5 изображена верхняя секционная панель робота телеприсутствия. На фиг.6 изображен манипулятор робота телеприсутствия. На фиг.7 изображен робот телеприсутствия в раскрытом состоянии. На фиг.8 изображена схема подключения компонентов робота телеприсутствия. Верхний модуль(1) В качестве платы управления будет использоваться одноплатный компьютер. В задачи, которой входит обработка мультимедийных данных. Играет роль, как связующий мост между всеми периферийными устройствами такие как камера, микрофон, монитор и т.д.(2) Модуль камеры, в перспективе возможны изменения модель камер. В данный момент используется модуль камеры от .(3)плата - модуль осуществляющий беспроводную связь между роботом и клиентом/сервером.(4) Контроллер двигателей поворота камеры драйвер,который падает соответствующее напряжение на двигатели в зависимости от принимающего ШИМ сигнал от.(5) Двигатели поворота камер - серво двигатели отвечающие за поворот платформы, на которой закреплена камера.(6) Сенсорный монитор свходом сенсорный дисплей отображающий видео от клиента с соответствующим компонентами управление на экране. Воспроизводит звук с колонок.(7)звуковая карта - устройство, к которой подключается микрофон. Переводит аналоговый звуковой сигнал в цифровой.(9) Плата управления движения - плата. Отвечает за обработку данных, и управление драйверами двигателей.(11) Датчик расстояние - сонар/инфракрасный дальномер измеряющий расстояние до объекта.(12) Контролер двигателей платформы - драйвер,который падает соответствующее напряжение на двигатели в зависимости от принимающего ШИМ сигнал от.(14) Драйвер двигателей подъемного механизма Контролер падает соответствующее напряжение на подъемный механизм в зависимости от принимающего ШИМ сигнал от.(15) Двигателей подъемного механизма устройство, поднимающее платформу. Манипулятор(16) Плата управления движения - плата. Отвечает за обработку данных, и управление драйверами двигателей манипулятора.(17) Драйвер двигателей манипулятора Контролер падает соответствующее напряжение на манипулятор в зависимости от принимающего ШИМ сигнал от.(18) Двигателей манипулятора - устройство,приводящее в движение манипулятор. Полезная модель осуществляется следующим образом. Настоящая полезная модель поясняется конкретным примером,который наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата, однако не является единственно возможным. Пример. Робот телеприсутствия оснащен платой управления мультимедиа (1), модулем камеры (2),-платой (3), контроллером двигателя поворота камерой (4), двигателями поворота камерой (5),монитором свходом (6), -звуковой картой (7), микрофоном (8), малогабаритными колонками (9), источником питания (10), платой управления движением (11), датчиком ускорения(15),двигателями платформы (16), драйвером двигателей подъемного механизма (17), двигателями подъемного механизма(18). ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Робот телеприсутствия,включающий платформу с манипулятором, отличающийся тем,что снабжен платформой, содержащей секционные панели, при этом нижняя секционная панель снабжена колесным приводом и источником питания, центральная секционная панель снабжена подъемным механизмом и манипулятором,снабженным сервоприводами и оснащенным механизмом захвата, а верхняя секционная панель снабжена экраном, динамиками, микрофоном и камерой. 2. Робот по п.1, отличающийся тем, что секционные панели сформированы из алюминиевых профилей и угловых элементов. 3. Робот по п.1, отличающийся тем, что секционные панели покрыты непрозрачным материалом.
МПК / Метки
МПК: B25J 9/00
Метки: робот, телеприсутствия
Код ссылки
<a href="https://kz.patents.su/6-u1324-robot-teleprisutstviya.html" rel="bookmark" title="База патентов Казахстана">Робот телеприсутствия</a>
Игрушка робот-клоун
Номер полезной модели: 918
Опубликовано: 15.03.2013
Авторы: Сейдалиева Алия Пернекуловна, Сейдалы Султанали Садатович, Сейдалиев Садат Камалович
МПК: A63H 3/00
Метки: игрушка, робот-клоун
Формула / Реферат:
Игрушка робот-клоунПолезная модель относится к индустрии детских товаров, а именно, к производству игровой продукции, оказывающей позитивное влияние на развитие ребёнка и обладающей звуковым, танцевальным, двигательным эффектами, оформленные в визуально яркой, привлекательной форме, как комбинация робота и мягкой игрушки-куклы, с воспитательной целью и для развлечения.Технический результат: создание комбинации робота и мягкой игрушки-куклы,...
Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Слуцкий Леонид Иосифович, Измамбетов Мырзабай Базарбаевич, Джамалов Нутпулла Камалович, Джолдасбеков Умирбек Арисланович
МПК: B25J 9/00
Метки: робот, промышленный
Формула / Реферат:
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно...
Устройство для автоматического управления механизированной крепью
Номер предварительного патента: 3639
Опубликовано: 16.09.1996
Авторы: Ермеков Толеухан Ермекович, Тир Икар Дмитриевич, Лагай Вениамин Алексеевич, Мамонтов Яков Яковлевич, Апиев Бакыт Молдабекович
МПК: E21D 23/14
Метки: автоматического, механизированной, устройство, управления, крепью
Формула / Реферат:
Изобретение относится к автоматизации и роботизации угледобывающих механизированных комплексов и внедряется на шахтах со сложными горногеологическими условиями угледобычи. Устройство имеет повышенную надежность и точность управления и содержит центральный пульт управления, секционные электроблоки с автономными источниками питания. Секционный блок снабжен приемником адреса секции и команд управления, передатчиком адреса секции, декодером,...
Комбинированный пульт дистанционного управления телевизором и радиотелефоном
Номер предварительного патента: 8360
Опубликовано: 15.12.1999
Авторы: Новосельский Игорь Аркадьевич, Васильев Иван Вениаминович, Вагин Сергей Петрович, Батырбеков Эрлан Гадлетович, Пол Степанофф
МПК: H04M 11/00, H04N 5/44
Метки: дистанционного, телевизором, управления, пульт, радиотелефоном, комбинированный
Формула / Реферат:
Устройство относится к радиотехнике и может быть использовано для дистанционного управления бытовой радиоэлектронной аппаратурой, в частности телевизионными приемниками, а также для ведения телефонных переговоров. Расширение функциональных возможностей устройства достигается тем, что комбинированный пульт дистанционного управления телевизором и радиотелефоном содержит блок дистанционного управления телевизором, управляющую панель, кнопочные...
Панель распределительная ЩО70 секционная со шкафом автоматического включения резерва (АВР)
Номер полезной модели: 289
Опубликовано: 15.05.2007
Авторы: Рязанцев Олег Владимирович, Водопьянов Павел Сергеевич
МПК: H02B 1/015
Метки: авр, шкафом, включения, панель, автоматического, секционная, резерва, що70, распределительная
Формула / Реферат:
Полезная модель относится к распределительным панелям и предназначена для комплектования щитов для приема и распределения электрической энергии.Задачей полезной модели является разработка распределительной секционной панели со шкафом АВР, имеющей упрощенную конструкцию, повышенную надежность, обеспечивающую уменьшение габаритных размеров щитов в целом.Панель распределительная ЩО70 секционная со шкафом автоматического включения резерва (АВР)...
Предыдущий патент: Система круглосуточной реализации товаров
Следующий патент: Нетканый текстильный материал
Случайный патент: Теплонасосная установка для сушки зерна