Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Измамбетов Мырзабай Базарбаевич, Слуцкий Леонид Иосифович, Джамалов Нутпулла Камалович, Джолдасбеков Умирбек Арисланович
Формула / Реферат
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно одним концом с гайкой соответствующего привода, а другим - с рабочим органом. Оси шарниров, связывающих рычажные звенья с рабочим органом, совмещены и одно из этих звеньев снабжено упорами, предназначенными для ограничения его перемещения относительно гайки соответствующего этому звену привода на упорах размещены конечные выключатели.
Текст
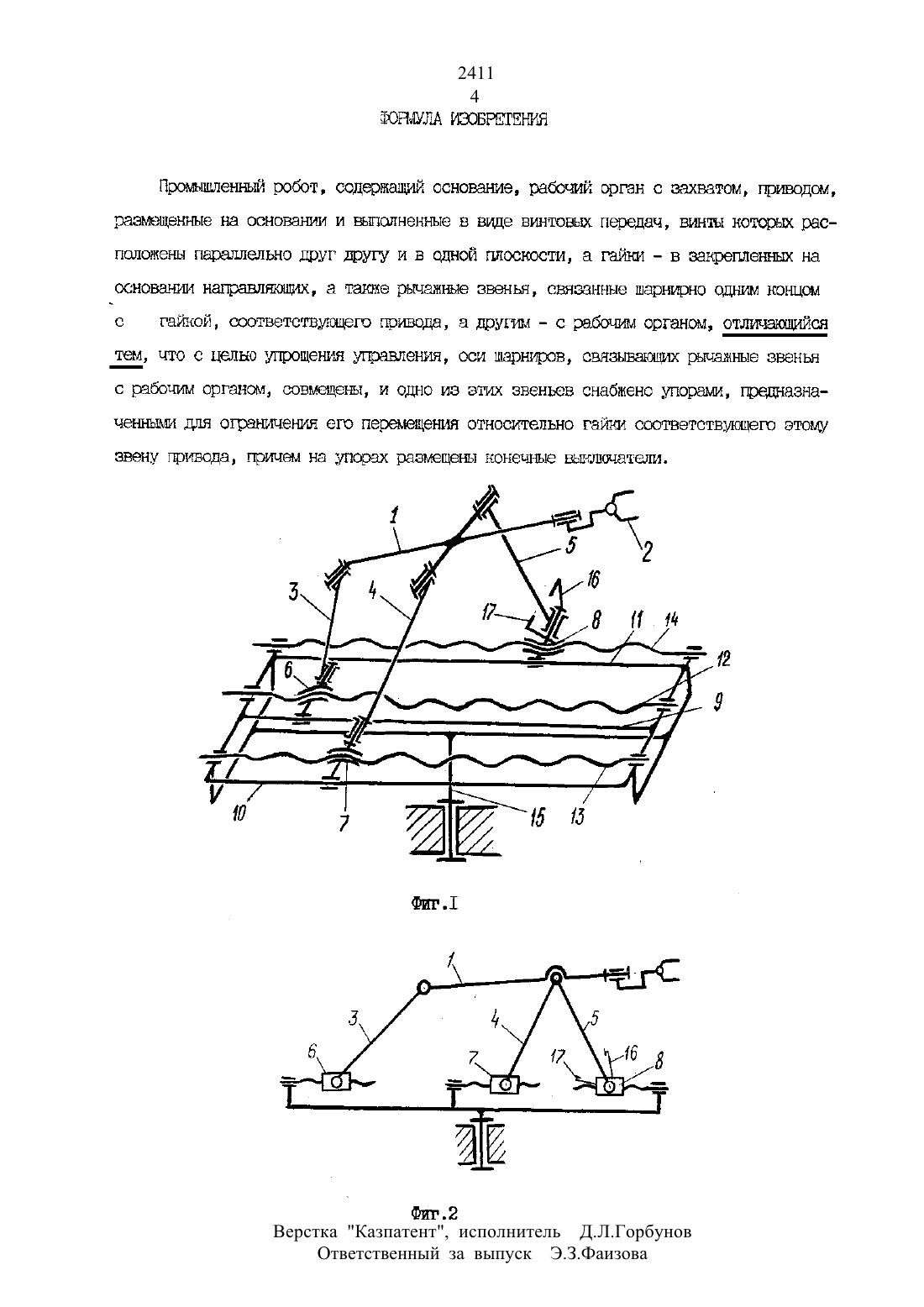
НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО ПРИ КАБИНЕТЕ МИНИСТРОВ РЕСПУБЛИКИ КАЗАХСТАН(73) Казахский государственный Нацио нальный университет ИМ. АлЬ-Фараби(57) Изобретение относится н области машиностроения, а именно - н грош/вахтовым роботам. Цель изобретения упрощеъше штравлешт ктрошшпенньви роботом.Промышленный робот содержит основание, рабочий орган с захватом. гриводы, размещавшие на основании и вьшопнешше в виде вхштовьос передач, вшпъ которых распадом жены парадшелтьно друг другу и в охи-кой гшосиости, а гейши в заъфепленньш на основании наггравдшощих, а также рычашнъде звенья, свяэанньте шарнирно одним концом о гайкой соответствуъонцего привода, а другим с рабочим органом. Оси шарниров, связываншвих рычажные звенья с рабочим органом, совмещены и одно из этих звеньев снабжено упорами, прешаазначештьш для ограничения ею перемещения относительно гайкиСООТВЕТСТВУЮЩЕГО ЭТОМУ ЗВБЪШ ГЮРГБОЦЗ на УПОСВХ резь/ведены ФОНЭЧНЫЭ БЬПШТРШЭТЗПИ.изобретение относится к машиностроении) а именно к проьшлшенньтл роботам и монет быть использовано для автолатизахш русл-пах, вспомогательных, причалили, погоди сочно-разгрузочное работ.известен протащивший робот, содержании основание, рабочий орган с захватом,установлении с возможностью вращения вокруг оси, посланы/полярной основание, приводы извенья. Приводы размещены на основании и выполнены в вице винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а таили размещены в эаъсэепленньлс на основании исповедании. Рабочий орган выполнен в вице ступенчатого везла с тайнами и основами дегазации, глрьшелч гнилое рьшаланое звено яларнирно соашлнено охи-кии конном с состветствьлсцей гаглкой привода, а шути - с гайкой коленчатого вала, а захват нтшеълатчлчесхсл связан с одной из щек этого/Авторсксе свидетельство СССР 3-29 1281401, ил. 825 9/00, 1985 г./.Недостатком известного устройства является НЭШМЕС особых пояснении исполнительного механиэла робота, в котороъи киснет произойти его аншлага/давние. При охи/анаши вил длинах всех рьлааэлньш звеньев, а талоне в тех случагок, когда они распслсглеъаьт паршшельно относительно доугншуга, появляется дополнительная неьтравэтнееаш степень неделимости механизма. В положениях, близких к названного, элесткость механизме уменьшается, что снижает точность псагшонгрсвеълан робота. Бароне того, глспслнительньлй глетнивтл робота представляет группу Ассура третьего класса, гит которых рснгение и обратной задач линетлаттъви является более слоэлньтм по сравнение с решением этил задач дляАосура второго лотосов. Это усложняет,система отравлении робота, так и процесс его обучения.Полнонвгьнетсн упрощение утгравленхлв ГЮОМЬШЬЧСНЬМ роботом.Поставленная. цель достигается тон, что в проникновением роботе, содсрнашелт основание, рабочий орган с воспетом, присвоил, ранг-дощатые на. основании и вьтопненнъле в вице винтовых передач, винты тесоторьш ретспслонеъпдч параллельно друг другу и в одной плоскости,гейши - в закрепленных на основании награждении,также ръщаичньчс авеньн, связанные шорнирно одъшм концом с гейшей соответствьлощего припасла, а Другим - с работали органом, согласно изобретении, оси шарниров, отстававших рь ангинеЗВСЗНЬН СОВГВНШ, ООВФЮЩЕЭЪЫ, И ОДНО ИЗ ЭТИХ ЭБЕЭНЬОБ СПЧНСЭРЕО ШТСЮЗЬМ, ГЮЕЩ-с2411 3 назначенными для отрешение его переглеицения относительно гайки соответствующего этому свеж-ш приводе, гричем не упорах РЗЗМЭЩНЫ нонеъпзьте вьншшвтели.Не Еиг. 1 представлена нинетлетъщеснеп схеме промьпнленного робота.Робот содержит рабочий орган 1, выполненной в вице ступенчатого вела, причем не егозакреплен зажат 2. Рьшенъппе звенья З, 4, 5 оденем вещами шершлрно соединены с идейному рабочее органе 1, е друплми соответствуъоихинтт гайками е, Р,8, которые ЭЗЭББЦЕЪЕЫ в неправщьчюпшх 9, 10, 11 и установлены не вшатех 12, 13, 14. Оси шарниров, сввзьхвиопнос рьпаиьвле звенья 4 и 5 с работаем органом 1, расположены однойНаправлнюпие 10, 11 закреплены на поворотном основании 15. звенодачи звено 4/ снебиень упорами 1-5, 17, на которых размещены концевые ньютонатели /не иг. не повзззньи. Соответствудшше Привет-тыс двигатели не сиг. не понезньт.Робот работает сцеплении обрезов .При вргщении талантов 12, 13, 14 гейш б, Р, 8 перец/чешется по нР,10, 11. При этом звенья З, 4, б, шернирно связанные с тайнами б, 7, 8, повореьлтвеютш не веденные углы и при этом перелетают работай орган 1 с зажатомв требуемую тонну зоны обалдевшие/в.Упоры 16 и 1 ограньваивезот угловое перемещение звене 5 относительно гейши В таким обраеоьа, чтобы оси звеньев 4,не находились в одной плоскости. при подходе звеньев 4 и 5 н вертикальном положение концевой вьвьтэчетсщь ижора 16 останавливает ширение привода годны/т 7 в прелом и ветвление приводе гати 8 в обратном непревленшж та шт 2 направлении твиста гзен показаны стрелнгзхиил При подходе звенюв 4 ин горизонтальному пояснение вьвнночетель упоре 1 останавливает движение приводе гайки Е в обратном и двшнение привода гейни 8 в прямом непршенътвэа. Телом оооезоли, звенья 4 и 5 образуют равносторонний июугольншт и тем севшим нсншоиеютон погхвление особых попоэненьъй гнехаьнлзгие, По сравнению с прототипом управление ггредлегеетьвч прокатывают-поэм роботом значительно упрощается в нонструнпии роботе используются только группы несшее второгоЕШЭССЗ, ЧТО ПОЗВСЩЯВТ ЩЮОСТИТЬ ПРОЦЕСС сорашровегтглп УПЦЭВЛРПШЛШ СИГНЕЭЪЛОБ.Проввшленшй робот, содержащий основание, рабочий орган с захватом, приводом,раэьющетгьте на основании и вьшопнетвте в вице винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки в эаъереппенхаьш на основании направляет, а также рычажные звенья, связанные щарннрно одшам концом с гайкой, соответствугацего прьтвода, а другим - с рабочим органом, отличающийся, что с ценно упрощения управления, оси шарниров, связькваших рьманъпэде звенья с рабочим органом, совмещены, и одно на этих звеньев снабжено упорами, предназначенными для ограничения его перемеэцения относительно гейши соответствующего этому8395-11. ППИВОДЗ, ГТЮИЧЕЗМ на ЫПОРЭХ ЗЭЗЪЮЩВЪЪТ НОНЗЧНЫЭ ВЬЩШ-1 Е 1 ТЗЛИ.Верстка Казпатент, Исполнитель Д.Л.Г 0 рбуН 0 в Ответственный за выпуск Э.3.ФаИз 0 ва
МПК / Метки
МПК: B25J 9/00
Метки: робот, промышленный
Код ссылки
<a href="https://kz.patents.su/4-2411-promyshlennyjj-robot.html" rel="bookmark" title="База патентов Казахстана">Промышленный робот</a>
Вибрационная машина
Номер патента: 1796
Опубликовано: 15.03.1995
Автор: Иванов Константин Самсонович
МПК: B06B 1/12
Метки: вибрационная, машина
Формула / Реферат:
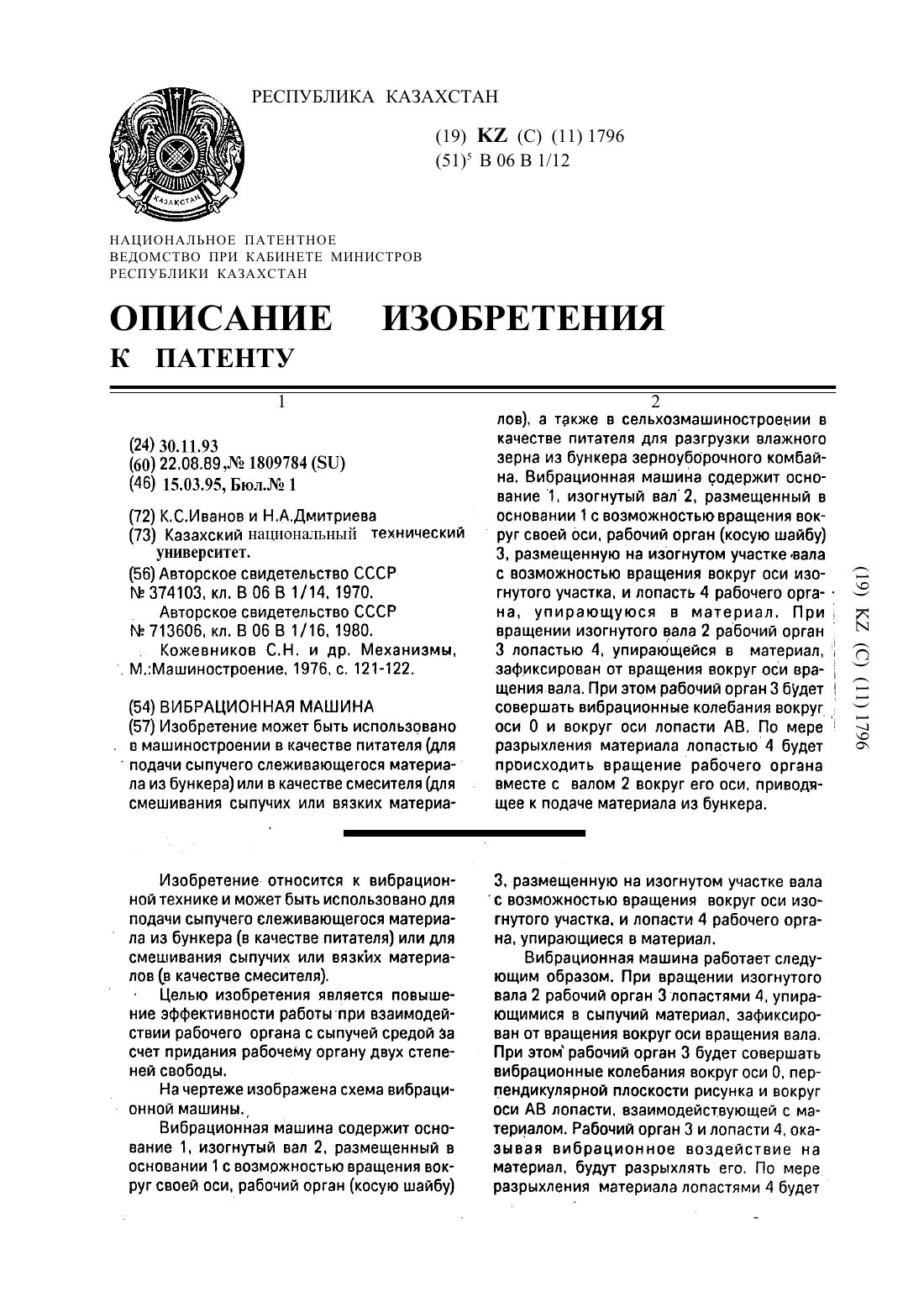
Изобретение может быть использовано в машиностроении в качестве питателя (для подачи сыпучего слеживающегося материала из бункера) или в качестве смесителя (для смешивания сыпучих или вязких материалов), а также в сельхозмашиностроении в качестве питателя для разгрузки влажного зерна из бункера зерноуборочного комбайна. Вибрационная машина содержит основание 1. изогнутый вал 2, размещенный в основании 1 с возможностью вращения вокруг своей оси,...
Манипулятор
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
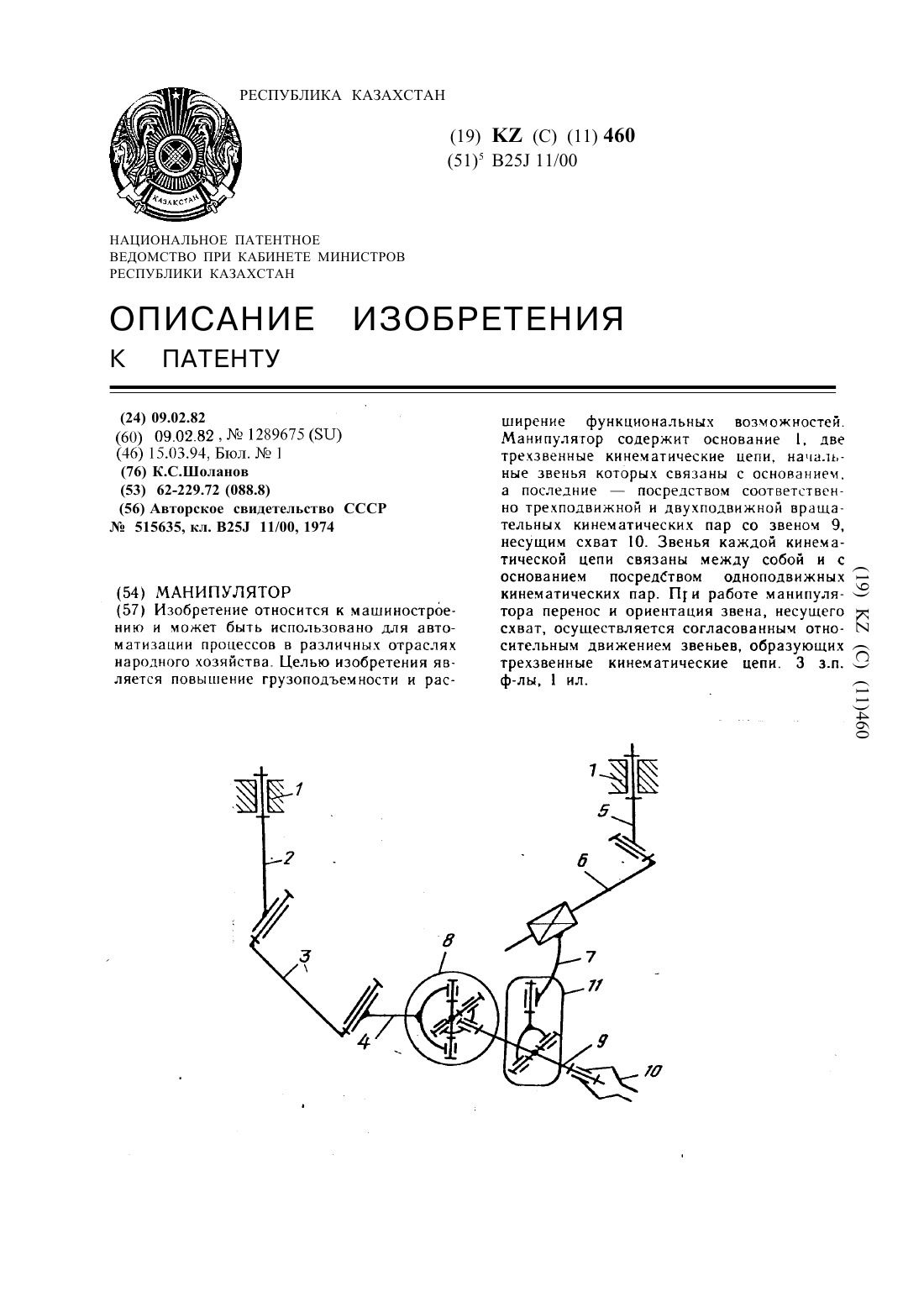
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Пресс поршневой гидравлический для формования керамического кирпича и камней
Номер предварительного патента: 1056
Опубликовано: 15.09.1994
Авторы: Беляев Виктор Николаевич, Стрелков Станислав Иванович, Несмиянов Вячеслав Петрович
МПК: B28B 3/26
Метки: пресс, поршневой, камней, кирпича, гидравлический, керамического, формования
Формула / Реферат:
Изобретение относится к области машиностроения промышленности строительных материалов и может быть использовано для формования кирпича и прочих керамических изделий экструзионным способом. Для уменьшения энергозатрат, повышения осевого давления прессования, исключения свилеобразного дефекта, более полной функциональности, снижения формовочной влажности глиняной массы , возможности жесткого формования глиняного бруса и пластического формования...
Устройство для регулирования разрежения
Номер предварительного патента: 1735
Опубликовано: 15.03.1995
Авторы: Спитченко Виктор Семенович, Ниетбаев Марат Абенович, Второв Александр Степанович, Нысанбеков Омир Аметбекович, Калкабеков Курбан Калкабекович, Шабалин Владимир Иванович, Еляков Сергей Иванович, Жакеев Айдар Айтмухамедович, Григоренко Александр Иванович, Тельбаев Сали Адильевич, Куттыбаев Коныс Куттыбаевич
МПК: F23L 11/00
Метки: устройство, разрежения, регулирования
Формула / Реферат:
Устройство для регулирования разрежения в системе, состоящей из источника выделения газов, соединительного газохода и сборного газохода, включающее датчик разрежения, регулятор, исполнительный механизм и рабочий орган, отличающееся тем, что рабочий орган выполнен в виде окна в соединительном газоходе, перекрываемого подвижной задвижкой, расположенной с внешней стороны соединительного газохода.
Кодовый замок
Номер патента: 187
Опубликовано: 20.12.1993
Автор: Джумабаев Асембек Рыскадырович
МПК: E05B 37/12
Формула / Реферат:
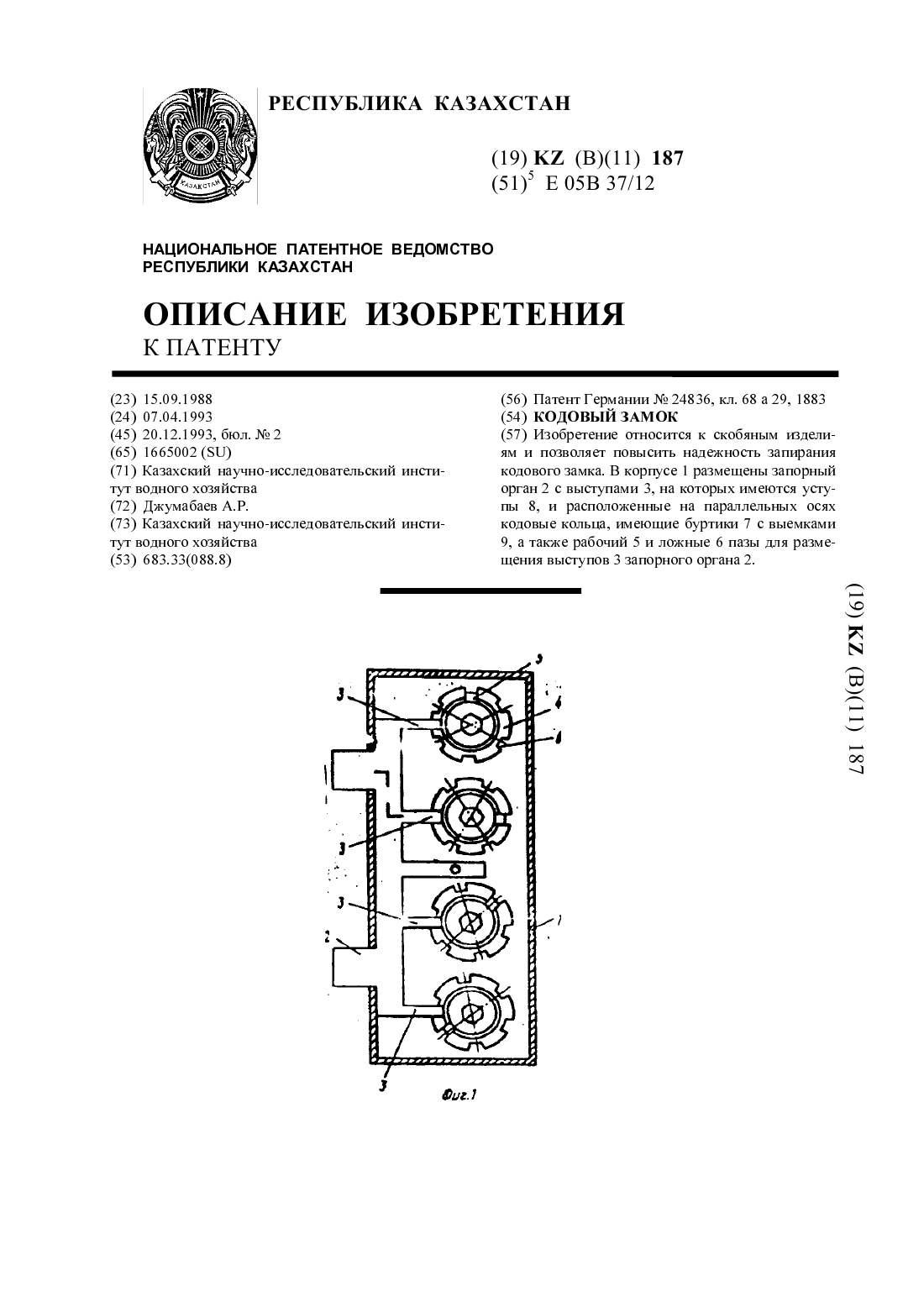
Изобретение относится к скобяным изделиям и позволяет повысить надежность запирания кодового замка. В корпусе 1 размещены запорный орган 2 с выступами 3, на которых имеются уступы 8, и расположенные на параллельных осях кодовые кольца, имеющие буртики 7 с выемками 9, а также рабочий 5 и ложные 6 пазы для размещения выступов 3 запорного органа 2.
Предыдущий патент: Устройство для установки сухарей
Следующий патент: Машинка для стрижки овец
Случайный патент: Способ диагностики воспалительных и регенерационных процессов слизистой матки после искусственного прерывания беременности