Универсальное роботизированное транспортное средство
Номер полезной модели: 1271
Опубликовано: 15.06.2015
Авторы: Байжанов Бектур Сембиулы, Крымусь Евгений Георгиевич, Мендакулов Жасулан Корабаевич, Хачикян Владислав Саркисович, Кальменов Тынысбек Шарипович
Формула / Реферат
Универсальное роботизированное транспортное средство
Полезная модель относится к робототехнике, в частности к системам, предназначенным для дистанционного перемещения предметов и грузов, сбора данных и может быть использовано в работах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения и уничтожения взрывоопасных устройств, доставки в заданный район специального оборудования, а также при проведении взры вотех н и ч ее к и х работ- и антитеррористических операций, при охране объектов и т.д.
Технический результат заключается в создании универсального роботизированного транспортного средства, способного определять свои текущие координаты, как в помещении, так и на открытой местности, а так же перемещать в заданную точку предметы и грузы посредством манипулятора.
I(редложено универсальное роботизированное транспортное средство, содержащее устройство для перемещения мобильного робота, устройство для обнаружения наличия препятствия на пути мобильного робота, устройство для определения местоположения мобильного робота, приемопередатчик, управляющий компьютер для обработки данных о сигнале с приемопередатчика и передачи управляющей команды па мобильный робот и телекамеру наблюдения, манипулятор, имеющий максимальную доступность к предметам, модуль GPS и модуль компаса для определения местоположения РТС, модуль контроллера для управления работой РТС, кроме того, в качестве устройства для перемещения мобильного робота использован колесный движитель 6x6, в качестве устройства для обнаружения наличия препятствия на пути РТС применен модуль ультразвукового измерителя, а в качестве пульта дистанционного управления использован ноутбук, при этом все узды роботизированного транспортного средства (РТС) выполнены в модульном варианте.
Текст
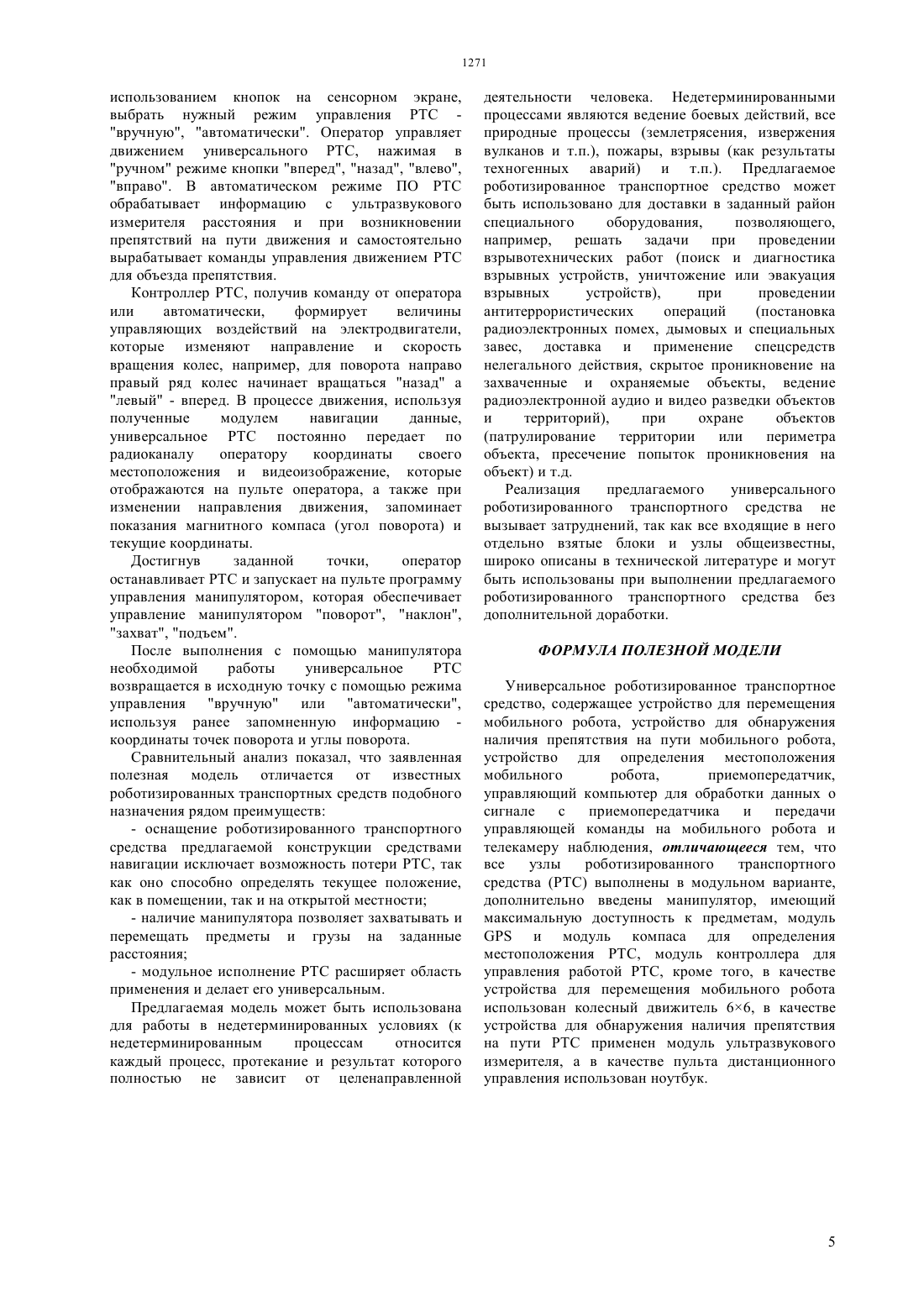
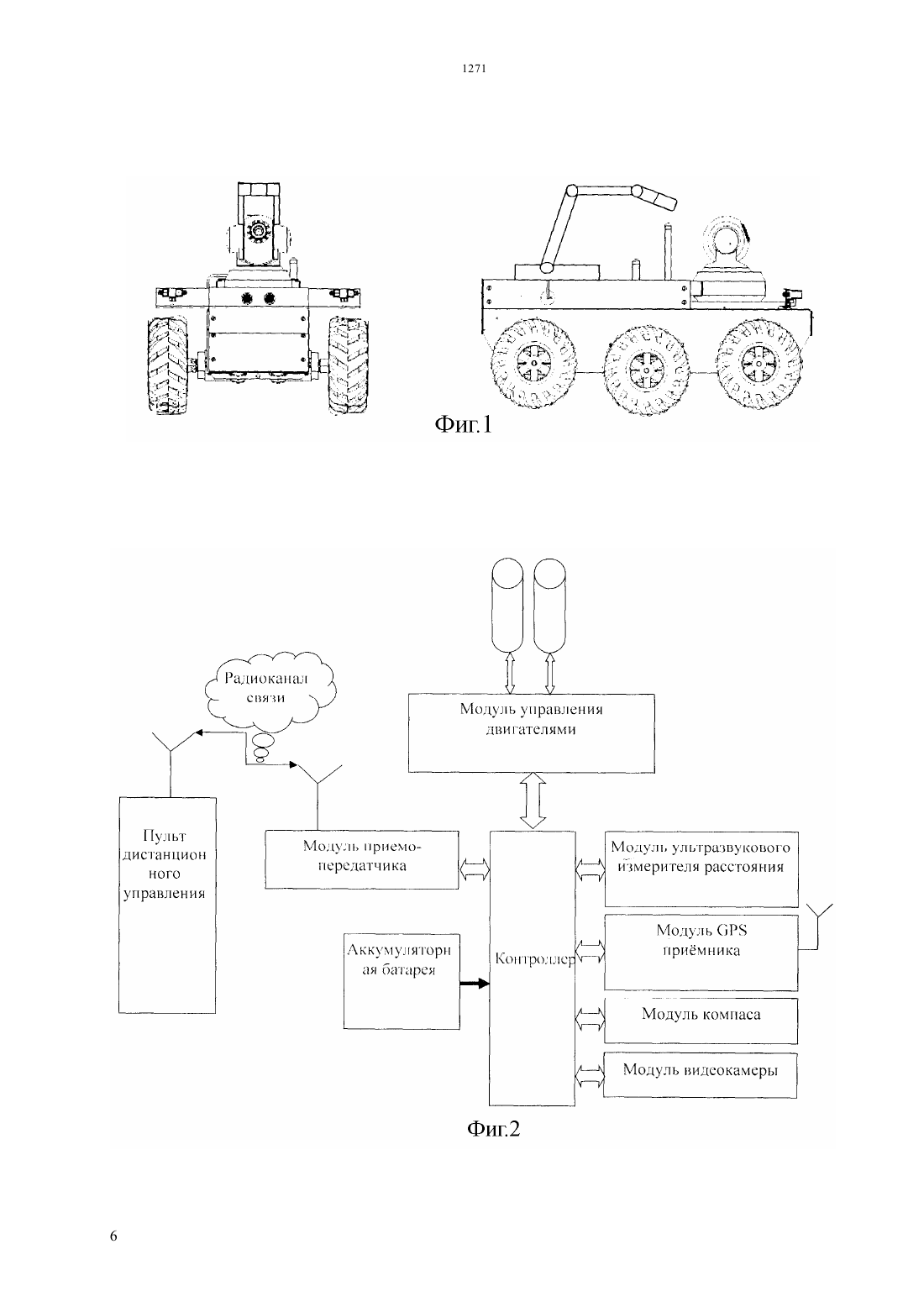
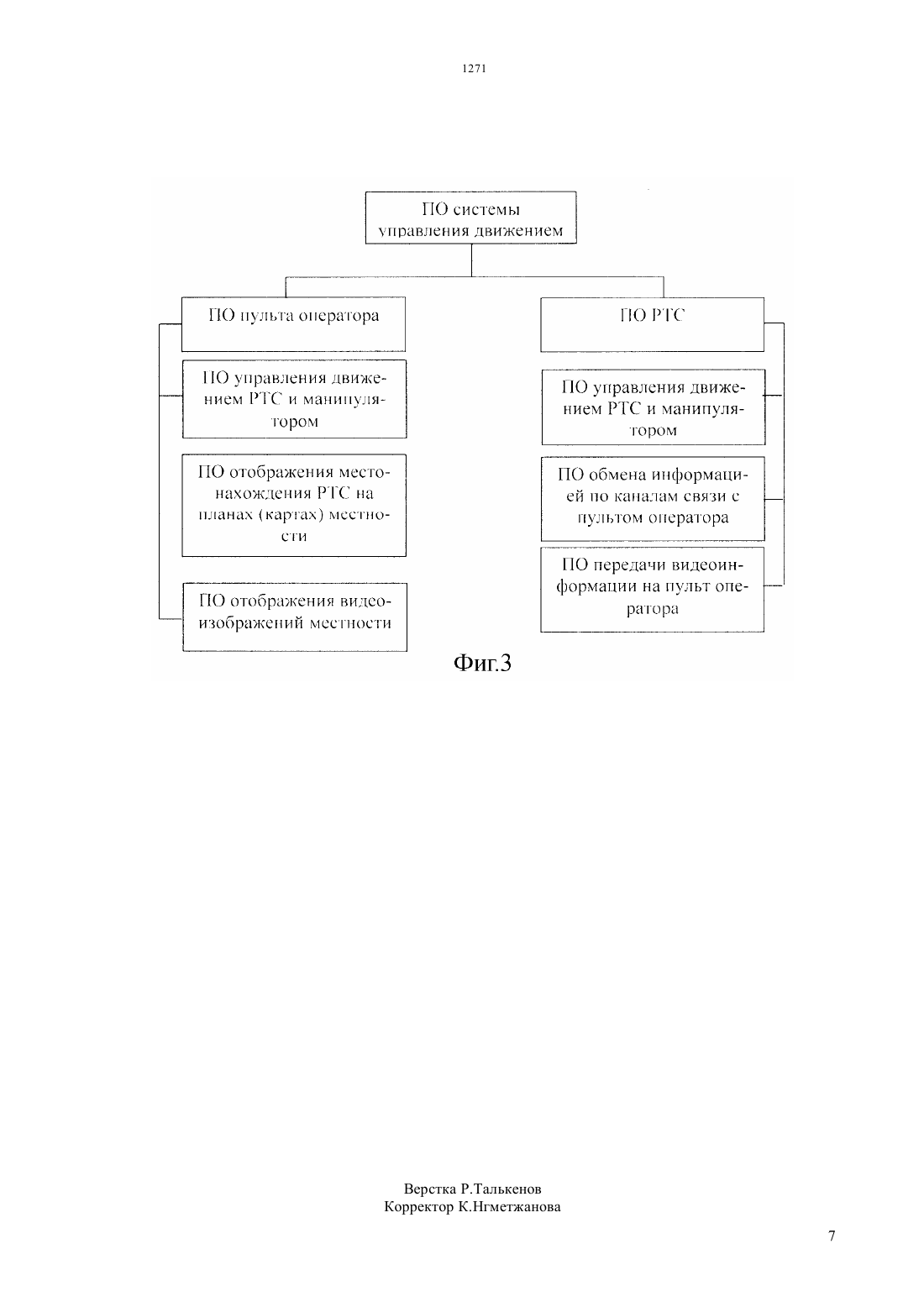
(51) 25 5/00 (2006.01) 25 9/00 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ Технический результат заключается в создании универсального роботизированного транспортного средства, способного определять свои текущие координаты, как в помещении, так и на открытой местности, а так же перемещать в заданную точку предметы и грузы посредством манипулятора. Предложено универсальное роботизированное транспортное средство, содержащее устройство для перемещения мобильного робота, устройство для обнаружения наличия препятствия на пути мобильного робота, устройство для определения местоположения мобильного робота,приемопередатчик, управляющий компьютер для обработки данных о сигнале с приемопередатчика и передачи управляющей команды на мобильный робот и телекамеру наблюдения, манипулятор,имеющий максимальную доступность к предметам,модульи модуль компаса для определения местоположения РТС, модуль контроллера для управления работой Т, кроме того, в качестве устройства для перемещения мобильного робота использован колесный движитель 66, в качестве устройства для обнаружения наличия препятствия на пути РТС применен модуль ультразвукового измерителя, а в качестве пульта дистанционного управления использован ноутбук, при этом все узлы роботизированного транспортного средства (РТС) выполнены в модульном варианте.(72) Хачикян Владислав Саркисович Мендакулов Жасулан Корабаевич Крымусь Евгений Георгиевич Байжанов Бектур Сембиулы Кальменов Тынысбек Шарипович(73) Республиканское государственное предприятие на праве хозяйственного ведения Институт математики и математического моделирования Комитета науки Министерства образования и науки Республики Казахстан(54) УНИВЕРСАЛЬНОЕ РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО(57) Полезная модель относится к робототехнике, в частности к системам, предназначенным для дистанционного перемещения предметов и грузов,сбора данных и может быть использовано в работах,предназначенных для ликвидации чрезвычайных ситуаций,например,для обнаружения и уничтожения взрывоопасных устройств, доставки в заданный район специального оборудования, а также при проведении взрывотехнических работ и антитеррористических операций, при охране объектов и т.д. Полезная модель относится к робототехнике, в частности к системам, предназначенным для дистанционного перемещения предметов и грузов,сбора данных, и может быть использована, в том числе при работах,предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения и уничтожения взрывоопасных устройств, доставки в заданный район специального оборудования,а также при проведении взрывотехнических работ и антитеррористических операций, при охране объектов и т.д. Из уровня техники известен мобильный робот(Патент , 2339501, кл. 25 5/00, 25 9/00,2008). Мобильный робот выполнен в виде транспортного средства и шарнирно соединенного с ним манипулятора, состоящего из первого звена,шарнирно соединенного с первым звеном второго звена, шарнирно соединенного со вторым звеном конечного третьего звена. Приводы звеньев установлены неподвижно относительно транспортного средства. Посредством передач с гибкими тяговыми органами второе и конечное звенья соединены с ведомыми дисками предохранительных муфт, ведущими дисками которых являются выходные колеса приводов второго и конечного звеньев. Выходные колеса приводов второго и конечного третьего звеньев установлены на одной общей неподвижной оси с возможностью вращения относительно этой оси,ведомые диски предохранительных муфт выполнены за одно целое с ведущими звеньями передач, имеющих гибкие тяговые органы, и также установлены на той же оси с возможностью вращения относительно общей оси. Недостаток известного мобильного робота заключается в том, что он не имеет камеры наблюдения,средств связи для передачи полученных данных с камеры наблюдения иприемника для навигации. Известен также мобильный робот (Патент 2487007, кл. 25 5/00, 2013), содержащий платформу, установленную на транспортном средстве, устройство для обнаружения препятствия,систему управления с блоком управления движением транспортного средства и устройством для обнаружения препятствия и соединенную с ними, манипулятор, шарнирно установленный на платформе и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев, на конечном из которых размещено устройство для обнаружения препятствия, имеющее подвижный щуп с наконечником и позиционночувствительный датчик. Блок управления движением транспортного средства подключен к блоку питания, связанному с последовательно соединенными микроконтроллером,шестым усилителем и электроприводом,входы микроконтроллера соединены с выходами датчиков текущего положения, скорости, углового и линейного перемещений, выполненных в виде энкодеров, зубчатки которых установлены на каждом колесе транспортного средств. Этот робот способен перемещаться по произвольным 2 траекториям, с высокой точностью обнаруживать препятствия, производить управляемые с четко контролируемыми параметрами подъезды и отъезды от препятствия. Однако он, как и вышеописанный мобильный робот, не имеет видеокамеры, необходимой для обзора местности, средств связи для передачи полученных данных с камеры наблюдения иприемника для навигации. Известный мобильный робот (Патент ,2210492, кл. 25 5/00, 25 9/00, 2003) содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствия и управляющую ими, устройство для определения текущего местоположения мобильного робота,соединенное с управляющей частью, и источник питания. Устройство для определения текущего местоположения мобильного робота содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке и первую видеоплату,обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Источник питания соединен с управляющей частью и аккумулирует электроэнергию и питает устройство для перемещения мобильного робота, устройство для обнаружения препятствия,устройство для определения местоположения и управляющую часть. Устройство для обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию,вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка, и вторую видеоплату для обработки видеоданных, полученных второй телекамерой. Этот робот также способен перемещаться по произвольным траекториям, с высокой точностью обнаруживать препятствия,производить управляемые подъезды и отъезды от препятствия. Однако этот мобильный робот может использоваться только в помещениях, так как определение местоположения робота происходит с помощью региональной корреляции порога видеоданных,полученных первой обзорной телекамерой. Наиболее близкой к заявляемой полезной модели по совокупности признаков является система с мобильным роботом,выполненная с использованием высокочастотного модуля (Патент, 2210491, кл. 25 5/00, 25 9/00, 2003). Система содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия на пути мобильного робота, устройство для определения местоположения мобильного робота, устройство связи, содержащее ВЧ-модуль, для передачи и приема сигнала для управления устройством для перемещения мобильного робота, устройством для обнаружения препятствий и устройством для определения местоположения, и управляющий компьютер для обработки данных о сигнале с первого приемопередатчика и передачи управляющей команды на мобильный робот, причем управляющий компьютер содержит средства связи для связывания компьютера с Интернет. Управляющий компьютер содержит второй приемопередатчик, содержащий ВЧ-модуль, для передачи сигнала на первый приемопередатчик мобильного робота и приема сигнала с этого приемопередатчика, видеоплату для обработки видеоданных, полученных при помощи первого приемопередатчика от устройства обнаружения препятствия и устройства определения местоположения. Кроме того, мобильный робот дополнительно содержит обзорную телекамеру наблюдения. Система предназначена для перемещения и сбора данных. К недостаткам ближайшего аналога относится то, что он, так же как и вышеуказанный мобильный робот, может использоваться только в помещениях,что ограничивает область его применения, кроме того, он не имеет манипулятора. Анализ основных технических характеристик известных мобильных роботов показывает, что всем им присущи следующие ограничения как правило,они не универсальны, т.е. предназначены для совершения определенного вида работы,отсутствует либо обзорная видеокамера, либо средства навигации, либо манипулятор. Задачей, на решение которой направлена настоящая полезная модель, является создание универсального роботизированного транспортного средства (РТС), которое могло бы преодолеть указанные выше недостатки существующих аналогов,обеспечить получение текущих координат, как в помещении, так и на открытой местности, способного перемещать предметы посредством манипулятора. Технический результат заключается в создании универсального роботизированного транспортного средства, способного определять свои текущие координаты, как в помещении, так и на открытой местности, а также перемещать в заданную точку предметы и грузы посредством манипулятора. Указанный технический результат в достигается тем, что в систему, включающую устройство для перемещения мобильного робота, устройство для обнаружения наличия препятствия на пути мобильного робота, устройство для определения местоположения мобильного робота, устройство связи, управляющий компьютер для обработки данных о сигнале с приемопередатчика и передачи управляющей команды на мобильный робот и обзорную телекамеру наблюдения, согласно предлагаемой полезной модели для перемещения предметов роботизированное транспортное средство дополнительно оснащено манипулятором, имеющим максимальную доступность к предметам, а для определения местоположения РТС введены модульи модуль компаса. Кроме того, в отличие от известного устройства для достижения указанного технического результата,все узлы универсального роботизированного транспортного средства (Т) выполнены в модульном варианте, что позволяет быстро переоснащать его для выполнения тех или иных задач. Технический результат достигается тем, что для управления работой предлагаемого универсального роботизированного транспортного средства введен модуль контроллера, а в качестве пульта дистанционного управления использован ноутбук. Технический результат достигается также тем,что в качестве устройства для перемещения универсального РТС использован колесный движитель 66, а в качестве устройства для обнаружения наличия препятствия на пути РТС применен модуль ультразвукового измерителя. Сущность полезной модели поясняется чертежами, где на фиг.1 приведен внешний вид универсального Т,на фиг.2 схема функционирования и связи между модулями РТС. На фиг.3 представлена структура ПО универсального роботизированного транспортного средства. Универсальное роботизированное транспортное средство включает (фиг.1) платформу на колесном ходу, оснащенную модулем программируемого логическою контроллера (фиг.2), модулем приемопередатчика по радиоканалу модулем интерфейса модулем управления двигателями модулем ультразвукового измерителя модулем приемника модулем компаса, видеосистемой,манипулятор и пульт дистанционного управления ноутбук. Платформа на колесном ходу выполнена с возможностью преодоления препятствий подъем до 30 ров - до 0,25 м и стенка - до 0,1 м. Питание колесного движителя обеспечивает аккумулятор. Модуль программируемого логического контроллераобеспечивает выполнение программ решения задач, обработку команд поступающих с пульта оператора, формирование команд управления движением РТС. В качестве модуля контроллера может быть использован,например, А 000063 или другой контроллер с аналогичными техническими характеристиками. Модуль приемо-передатчика по радиоканалу обеспечивает взаимодействие пульта оператора и РТС по радиоканалу и передачу на пульт управления видеоизображений местности, где он находится и координат своего местоположения. В качестве модуля приемо-передатчика может быть применен, например, ТЕ 0030 АРС 802 или какой-либо другой с аналогичными техническими характеристиками. Модуль интерфейсаобеспечивает взаимодействие пульта оператора и РТС по проводному каналу и передачу на пульт управления видеоизображений местности, где он находится, и координат своего местоположения. В качестве модуля интерфейса может быть использован,например, А 0000723, 3 либо другой с аналогичными техническими характеристиками. Модуль управления двигателями предназначен для выполнения команд (вперед, назад, влево,вправо, стоп), формируемых в контроллере по управлению двигателями постоянного тока,приводящими в движение РТС. Может быть использован, например, А 0000793 или другой с аналогичными техническими характеристиками. Модуль ультразвукового измерителя расстояния,обеспечивает обнаружение препятствий,возникающих на пути движения РТС. В качестве модуля может быть применен, например, 0001 37 или какой-либо другой с аналогичными техническими характеристиками. Модуль -примника предназначен для определения текущих координат местоположения РТС. В качестве модуля -примника может быть использован, например, 0044, или другой, обеспечивающий близкие технические характеристики. Модуль компаса обеспечивает определение ускорений, наклонов, углов поворотов Т. В качестве модуля может быть применен, например,-10703 303 либо какой-нибудь другой с подходящими техническими характеристиками. Модуль видеосистемы обеспечивает видеонаблюдение окружающей местности. Может быть использована видеокамера -10061 или другая с близкими техническими характеристиками. Манипулятор предназначен для перемещения различных предметов и грузов на заданные расстояния. В качестве пульта дистанционного управления можно применить любой ноутбук, который обеспечит формирование оператором команд управления движением и передачу их по радио/проводным каналам связи на РТС,отображение местоположения РТС и видеоизображений местности передаваемых с РТС по радио/проводным каналам связи. Программное обеспечение (ПО) системы управления движением универсального РТС (фиг.3) состоит из ПО пульта оператора и ПО РТС. Программное обеспечение пульта оператора базируется на операционной системе 7 и состоит из- ПО управления движением РТС- ПО отображения местонахождения РТС на планах (картах) местности- ПО отображения видеоизображений местности. ПО управления движением РТС предназначено для автоматизированного выполнения следующих основных функций формирование команд управления,соответствующих нажатию оператором кнопок на ПКи обеспечивающих движение РТС в заданном направлении автоматическое формирование команд управления движением РТС по заранее проложенному на цифровой карте маршруту движения к заданной точке автоматическое формирование команд управления движением РТС для возврата в исходную точку- передача команд управления по каналам связи(радио, проводной) на РТС и контроль их выполнения. ПО отображения местонахождения РТС на планах (картах) местности предназначено для выполнения следующих основных функций- создания и ведения базы цифровой картографической информации- получения по каналам связи координат местоположения РТС, определяемых с помощью приемникаустановленного на РТС- отображения местонахождения РТС на фоне карты выводимой на монитор ПК. ПО отображения видеоизображений местности предназначено для выполнения следующих основных функций- вывод на монитор ПК видеокадров,передаваемых по каналам связи с РТС- хранение, при необходимости полученных видеокадров в архиве- просмотр архивных видеокадров. ПО робототехнического транспортного средства состоит из- ПО управления движением РТС- ПО обмена информацией но каналам связи с пультом оператора- ПО передачи видеоинформации на пульт оператора. ПО управления движением РТС предназначено для выполнения следующих основных функций- реализация команд формируемых в пульте оператора- формирование и реализация команд управления при отсутствии связи с пультом оператора на основании информации поступающей с датчиков модуль ультразвукового измерителя расстояния,модуль компаса формирование и реализация команд управления, при отсутствии связи с пультом оператора для автоматического возврата в исходную точку на основании автономно запомненных данных для пройденного маршрута (время до точки поворота, курсовые данные, скорость и пр.). Предлагаемая полезная модель работает следующим образом. На РТС (фиг.2) включается электропитание,автоматически на контроллере запускаются программы (фиг.3) Управление движением РТС и манипулятором, Обмена информацией но каналам связи, Передачи видеоинформации на пульт оператора, РТС при этом находится неподвижно, в режиме ожидания команды с пульта оператора. Используя оснащенный радиомодемом ноутбук с установленным на нем соответствующим программным обеспечением оператор запускает программу Управление движением РТС и манипулятором. Программа позволят оператору, с использованием кнопок на сенсорном экране,выбрать нужный режим управления РТС вручную, автоматически. Оператор управляет движением универсального РТС, нажимая в ручном режиме кнопки вперед, назад, влево,вправо. В автоматическом режиме ПО РТС обрабатывает информацию с ультразвукового измерителя расстояния и при возникновении препятствий на пути движения и самостоятельно вырабатывает команды управления движением РТС для объезда препятствия. Контроллер РТС, получив команду от оператора или автоматически,формирует величины управляющих воздействий на электродвигатели,которые изменяют направление и скорость вращения колес, например, для поворота направо правый ряд колес начинает вращаться назад а левый - вперед. В процессе движения, используя полученные модулем навигации данные,универсальное РТС постоянно передает по радиоканалу оператору координаты своего местоположения и видеоизображение, которые отображаются на пульте оператора, а также при изменении направления движения, запоминает показания магнитного компаса (угол поворота) и текущие координаты. Достигнув заданной точки,оператор останавливает РТС и запускает на пульте программу управления манипулятором, которая обеспечивает управление манипулятором поворот, наклон,захват, подъем. После выполнения с помощью манипулятора необходимой работы универсальное РТС возвращается в исходную точку с помощью режима управления вручную или автоматически,используя ранее запомненную информацию координаты точек поворота и углы поворота. Сравнительный анализ показал, что заявленная полезная модель отличается от известных роботизированных транспортных средств подобного назначения рядом преимуществ- оснащение роботизированного транспортного средства предлагаемой конструкции средствами навигации исключает возможность потери РТС, так как оно способно определять текущее положение,как в помещении, так и на открытой местности- наличие манипулятора позволяет захватывать и перемещать предметы и грузы на заданные расстояния- модульное исполнение РТС расширяет область применения и делает его универсальным. Предлагаемая модель может быть использована для работы в недетерминированных условиях (к недетерминированным процессам относится каждый процесс, протекание и результат которого полностью не зависит от целенаправленной деятельности человека. Недетерминированными процессами являются ведение боевых действий, все природные процессы (землетрясения, извержения вулканов и т.п.), пожары, взрывы (как результаты техногенных аварий) и т.п.). Предлагаемое роботизированное транспортное средство может быть использовано для доставки в заданный район специального оборудования,позволяющего,например, решать задачи при проведении взрывотехнических работ (поиск и диагностика взрывных устройств, уничтожение или эвакуация взрывных устройств),при проведении антитеррористических операций(постановка радиоэлектронных помех, дымовых и специальных завес, доставка и применение спецсредств нелегального действия, скрытое проникновение на захваченные и охраняемые объекты, ведение радиоэлектронной аудио и видео разведки объектов и территорий),при охране объектов(патрулирование территории или периметра объекта, пресечение попыток проникновения на объект) и т.д. Реализация предлагаемого универсального роботизированного транспортного средства не вызывает затруднений, так как все входящие в него отдельно взятые блоки и узлы общеизвестны,широко описаны в технической литературе и могут быть использованы при выполнении предлагаемого роботизированного транспортного средства без дополнительной доработки. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ Универсальное роботизированное транспортное средство, содержащее устройство для перемещения мобильного робота, устройство для обнаружения наличия препятствия на пути мобильного робота,устройство для определения местоположения мобильного робота,приемопередатчик,управляющий компьютер для обработки данных о сигнале с приемопередатчика и передачи управляющей команды на мобильного робота и телекамеру наблюдения, отличающееся тем, что все узлы роботизированного транспортного средства (РТС) выполнены в модульном варианте,дополнительно введены манипулятор, имеющий максимальную доступность к предметам, модульи модуль компаса для определения местоположения РТС, модуль контроллера для управления работой РТС, кроме того, в качестве устройства для перемещения мобильного робота использован колесный движитель 66, в качестве устройства для обнаружения наличия препятствия на пути РТС применен модуль ультразвукового измерителя, а в качестве пульта дистанционного управления использован ноутбук.
МПК / Метки
Метки: средство, универсальное, роботизированное, транспортное
Код ссылки
<a href="https://kz.patents.su/7-u1271-universalnoe-robotizirovannoe-transportnoe-sredstvo.html" rel="bookmark" title="База патентов Казахстана">Универсальное роботизированное транспортное средство</a>
Транспортное средство со сменным движителем
Номер полезной модели: 1
Опубликовано: 15.03.1994
Автор: Габдуллин Зейнулла Габдрахимович
МПК: B62D 55/04
Метки: сменным, движителем, транспортное, средство
Формула / Реферат:
Полезная модель относится ксельскохозяйственному машиностроению, вчастности, к транспортным средствам с колеснымили гусеничным ходом. Для упрощенияпреобразования транспортного средства сколесного хода на гусеничный и наоборот втранспортном средстве со сменным движителем,включающее кабину, раму с лонжеронами, передний изадний мосты, конечные передачи, колеса и силовуюсвязь, силовая связь, соединяющая ведущие колесамежду собой, содержит переходные...
Пассажирское транспортное средство
Номер предварительного патента: 1058
Опубликовано: 15.09.1994
Автор: Федотов Александр Платонович
МПК: B60N 5/00
Метки: пассажирское, транспортное, средство
Формула / Реферат:
Изобретение относится к пассажирскому транспорту, например, автобусам, троллейбусам, трамваям. Известна конструкция транспортного средства, в котором контроль оплаты осуществляется у входной двери водителем. Конструкция не исключает попадания пассажиров, без оплаты, через выходную, неконтролируемую дверь. Необходимо исключить возможность прохода пассажиров в салон через выходные двери. Технический результат, получаемый от осуществления...
Транспортное средство с погрузочно-разгрузочным устройством
Номер патента: 2788
Опубликовано: 15.12.1995
Автор: Сопов Юрий Васильевич
МПК: B60P 1/44
Метки: погрузочно-разгрузочным, средство, транспортное, устройством
Формула / Реферат:
Изобретение относится к погрузочно-разгрузочным механизмам на автотранспорте.Транспортное средство с погрузочно-разгрузочным устройством содержит самоходное шасси с кузовом, на задней части которого смонтирована с возможностью поворота в вертикальной продольной плоскости вокруг горизонтальной оси погрузочная площадка, поднос и опорная пластина, а также устанавливаемой на борт транспортного средства струбциной, к которой шарнирно прикреплена...
Транспортное средство со сменным движителем
Номер инновационного патента: 22165
Опубликовано: 15.01.2010
Авторы: Абишев Кайратолла Кайрулинович, Бекенов Тасыбек Нусупбекович, Муканов Руслан Батырбекович
МПК: B62D 55/04
Метки: средство, сменным, транспортное, движителем
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, в частности, к транспортным средствам с колесным и гусеничным ходом.Цель изобретения - регулирование положения центра давления транспортного средства.Транспортное средство со сменным движителем, включающее раму, передний и задний мосты, конечные передачи, колеса, две гусеничные тележки, содержащие каждая резиноармированную гусеницу с ведущим колесом, диаметр которого больше диаметра...
Транспортное средство с автономным ходом
Номер полезной модели: 738
Опубликовано: 15.12.2011
Авторы: Ширяев Виталий Васильевич, Парамзин Василий Порфирьевич, Дьяченко Дмитрий Владимирович, Дьяченко Владимир Григорьевич
МПК: B60L 11/12
Метки: средство, транспортное, автономным, ходом
Формула / Реферат:
Полезная модель относится к транспортным средствам с комбинированными энергоустановками, в частности к маневровым тепловозам с автономным ходом.Техническим результатом полезной модели - является повышение эффективности при эксплуатации и расширение арсенала средств назначения.Это достигается тем, что в предлагаемом транспортном средстве с автономным ходом, включающем тяговый электродвигатель, включенный с возможностью соединения питающей цепью...
Предыдущий патент: Рециркулятор воздуха
Следующий патент: Защитная наклейка
Случайный патент: Способ идентификации лимфоцитов