Исполнительный механизм робота с двумя схватами
Номер инновационного патента: 29601
Опубликовано: 16.03.2015
Авторы: Байгунчеков Жумадил Жанабаевич, Байгунчеков Нурлан Жумадилович, Измамбетов Мырзабай Базарбаевич
Формула / Реферат
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов (деталей) между различными стадиями их обработки при конвейерной организации производства.
Техническим результатом является значительное упрощение управления исполнительным механизмом робота при координации движения двух схватов.
Исполнительный механизм робота, содержащий стойку, два основных и один дополнительный кривошипы, шарнирно связанные с тремя шатунами, два из которых снабжены схватами и приводной двигатели, установленный в шарнире второго ведущего кривошипа, причем один из ведущих и дополнительный кривошипы выполнены в виде базисных звеньев (треугольных жестких контуров) и свободными вершинами шарнирно соединены между собой дополнительным бинарным звеном.
Текст
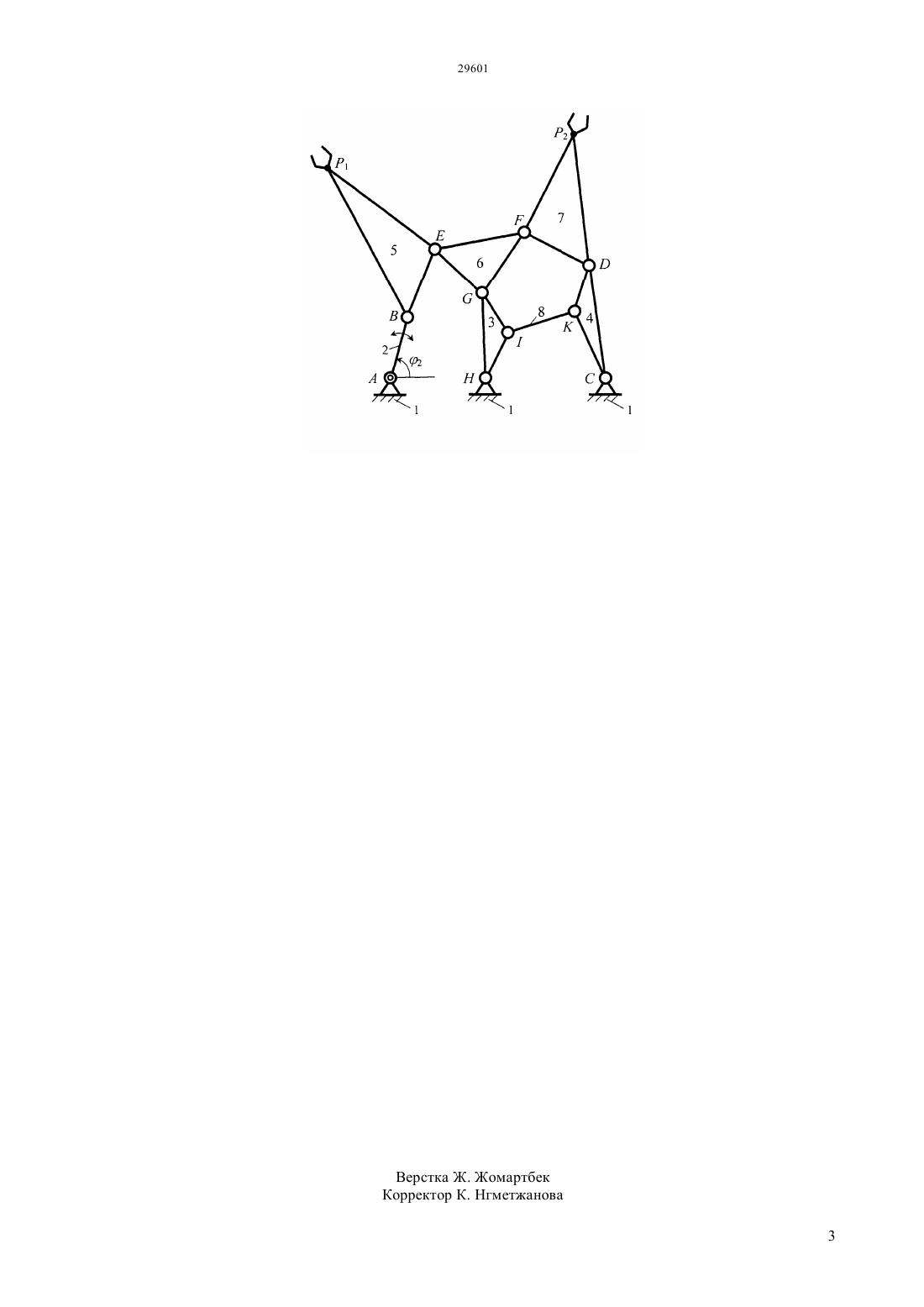
МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ обработки при конвейерной организации производства. Техническим результатом является значительное упрощение управления исполнительным механизмом робота при координации движения двух схватов. Исполнительный механизм робота, содержащий стойку, два основных и один дополнительный кривошипы, шарнирно связанные с тремя шатунами, два из которых снабжены схватами и приводной двигатели, установленный в шарнире второго ведущего кривошипа, причем один из ведущих и дополнительный кривошипы выполнены в виде базисных звеньев (треугольных жестких контуров) и свободными вершинами шарнирно соединены между собой дополнительным бинарным звеном.(72) Байгунчеков Жумадил Жанабаевич Измамбетов Мырзабай Базарбаевич Байгунчеков Нурлан Жумадилович(73) Акционерное общество КазахстанскоБританский технический университет(54) ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА С ДВУМЯ СХВАТАМИ(57) Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов(деталей) между различными стадиями их Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных работ, а также как средство для одновременного продвижения двух объектов(деталей) между различными стадиями их обработки при конвейерной организации производства. Известен исполнительный механизм робота,содержащий основание (стойку), два кривошипа,шарнирно связанных с приводными двигателями,расположенных на стойке, и шатунами, один из которых снабжен схватом. Указанные кривошипы и шатуны образуют замкнутый пятизвенный механизм, к которому присоединен двузвенник,состоящий из шатуна, снабженного схватом и кривошипа, шарнирно соединенного с основанием(А.с. СССР 1722806,кл. В 25 9/00,опубл.30.03.1992, Бюл.12). Недостаток известного исполнительного механизма робота заключается в том, что для большей универсальности в решении задач позиционирования его конструкция выполнена как механизм 2-го класса (по классификации Ассура) с двумя степенями свободы. При этом наличие двух активных приводов, если учитывать однотипность траекторий и цикличность движения захватов манипулятора во многих технологических процессах, не всегда оправдано, к тому же усложняет управление исполнительным механизмом. Задачей предлагаемого изобретения является разработка конструкции одноподвижного исполнительного механизма робота 5-го класса по Ассуру для одновременной координации движения двух его схватов. Техническим результатом является значительное упрощение управления исполнительным механизмом манипулятора при координации движения двух схватов. Технический результат достигается тем, что в известном исполнительном механизме робота,состоящем из основания, двух основных и одного дополнительного кривошипов, шарнирно связанных с основанием и соответственно с двумя основными и одним дополнительным шатунами, которые шарнирно связаны между собой, двух двигателей,установленных в шарнирах,связывающих основание соответственно с первым и вторым основными кривошипами,двух схватов,установленных соответственно на первом основном и дополнительном шатунах, согласно изобретению,второй и дополнительный кривошипы выполнены в виде базисных звеньев (треугольных жестких контуров) и свободными вершинами шарнирно соединены между собой дополнительным бинарным звеном, а двигатель, установленный в шарнире, 2 связывающем основание со вторым основным кривошипом, отключен и находится в нейтральном состоянии. Сущность предлагаемого изобретения поясняется чертежом (Фиг.1), где изображена кинематическая схема исполнительного механизма робота в произвольном положении рабочих точек Р 1, Р 2. Исполнительный механизм содержит стойку 1,шарнирно связанные с ней рычаги 2-4, причем рычаг 2 является ведущим и вращается от привода(на чертеже не показан) относительно шарнира А, а рычаги 3 и 4 выполнены в виде жестких треугольных контуров и шарнирно соединены между собой дополнительным бинарным звеном 8. Рычаги 2-4 шарнирно соединены с шатунами 5-7,соответственно, которые шарнирно связаны между собой. Шатуны 5-7 могут быть выполнены в виде треугольных базисных звеньев, при этом несмежные шатуны 5 и 7 снабжены захватами Р 1 и Р 2. Таким образом стойка 1 и ведущий рычаг 2 шарнирами Н,С и В соединены с шестизвенной кинематической цепью, выполненной в виде группы Ассуракласса, состоящей из 3, 8, 4, 7, 6 и 5. Исполнительный механизм робота работает следующим образом. Ведущий рычаг 2 совершает вращение от привода относительно шарнира А. Движение ведущего рычага однозначно передается по шарнирно соединенным звеньям 5, 6, 7, 4, 8 и 3,образующим группу Ассуракласса, обеспечивая воспроизведение требуемых движений схватов Р 1 и Р 2 по двум взаимокоординированным траекториям. Предлагаемый исполнительный механизм робота с двумя схватами позволяет координировать движения двух объектов манипулирования с использованием только одного активного привода за счет использования в его конструкции шестизвенной группы Ассуракласса. При этом в сравнении с прототипом значительно упрощается система управления роботом. ФОРМУЛА ИЗОБРЕТЕНИЯ Исполнительный механизм робота, содержащий стойку, приводные двигатели, два основных и один дополнительный кривошипы, шарнирно связанные с тремя шатунами, два из которых снабжены схватами, отличающийся тем, что один из ведущих и дополнительный кривошипы выполнены в виде базисных звеньев (треугольных жестких контуров) и свободными вершинами шарнирно соединены между собой дополнительным бинарным звеном, а манипуляция схватами осуществляется от одного двигателя, установленного в шарнире второго ведущего кривошипа.
МПК / Метки
МПК: B25J 9/00
Метки: исполнительный, двумя, робота, схватами, механизм
Код ссылки
<a href="https://kz.patents.su/3-ip29601-ispolnitelnyjj-mehanizm-robota-s-dvumya-shvatami.html" rel="bookmark" title="База патентов Казахстана">Исполнительный механизм робота с двумя схватами</a>
Пространственный регулируемый исполнительный механизм робота
Номер патента: 12175
Опубликовано: 15.03.2006
Автор: Канлыбаев Оразалы
МПК: B25J 9/00
Метки: робота, механизм, регулируемый, пространственный, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного регулируемого исполнительного механизма робота, расположенного на взаимно перпендикулярных осях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений, позицирование объектами различных конфигураций и...
Пространственный исполнительный механизм робота
Номер предварительного патента: 9242
Опубликовано: 14.07.2000
Авторы: Балахметов Болат Кажахметович, Канлыбаев Оразалы, Канлыбаева Марфуга Оразалыевна
МПК: B25J 9/00
Метки: робота, исполнительный, механизм, пространственный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов для автоматизации сборочных, штамповочных, транспортных и других работ. Создание пространственного исполнительного механизма робота, расположенного во взаимно перпендикулярных плоскостях трехмерного пространства, обеспечивает одинаковыми приводами вращательных движений одновременную работу с тремя объектами в трехмерном...
Исполнительный механизм параллельного манипулятора
Номер предварительного патента: 11956
Опубликовано: 16.09.2002
Авторы: Сейтбеков Айдар Лесбекович, Барри Хулл, Нурахметов Бауржан Кумаргалиевич, Мир Насири Назим, Байгунчеков Жумадил Жанабаевич, Жумашева Жадыра Токановна, Садыков Женис Абжанович, Байдлаева Гульбахыт Кенесовна, Дайжонг Су, Байгунчеков Нурлан Жумадилович
МПК: B25J 9/10, B25J 9/06, B25J 9/04...
Метки: исполнительный, параллельного, механизм, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.Техническим результатом изобретения является расширение функциональных возможностей работы манипулятора.Исполнительный механизм параллельного манипулятора содержит треугольную стойку с тремя шарнирами, платформу с шарнирами, соединенными связями с шарнирами стойки, причем, один из шарниров платформы и один из...
Исполнительный механизм манипулятора
Номер предварительного патента: 12080
Опубликовано: 15.10.2002
Авторы: Барри Хулл, Жумашева Жадыра Токановна, Мир Насири Назим, Садыков Женис Абжанович, Сейтбеков Айдар Лесбекович, Байгунчеков Жумадил Жанабаевич, Нурахметов Бауржан Кумаргалиевич, Байдлаева Гульбахыт Кенесовна, Дайжонг Су, Байгунчеков Нурлан Жумадилович
МПК: B25J 3/00
Метки: манипулятора, механизм, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных и монтажных работ.Технический результат изобретения - обеспечение синхронного движения двух рабочих точек от одного привода.Исполнительный механизм манипулятора содержит стойку, семь звеньев, шесть из которых соединены по три звена и между собой вращательными шарнирами в две кинематические цепи с рабочими точками в третьих звеньях, выполненных в виде...
Исполнительный механизм манипулятора
Номер предварительного патента: 9980
Опубликовано: 15.03.2001
Авторы: Антони Уайт, Радж Гилл, Абдрашев Саттар Жусупович, Садыков Женис Абжанович, Нурахметов Бауржан Кумаргалиевич, Жумашева Жадыра Токановна, Байгунчеков Нурлан Жумадилович, Байгунчеков Жумадил Жанабаевич
МПК: B25J 9/00
Метки: механизм, манипулятора, исполнительный
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных монтажных работ.Техническим результатом является обеспечение координации движения двух рабочих точек манипулятора, повышение его грузоподъемности и точности позиционирования. Исполнительный механизм манипулятора, содержащий стойку, три звена, соединенные между собой вращательными шарнирами в кинематическую цепь с рабочей точкой в третьем звене, начало...
Предыдущий патент: Способ обогащения полиметаллической медно-свинцовой-цинковой руды
Следующий патент: Исполнительный механизм робота с двумя схватами
Случайный патент: Комбинированная сеялка