Мобильный робототехнический комплекс с управлением на основе искусственного интеллекта
Номер инновационного патента: 28438
Опубликовано: 15.05.2014
Авторы: Атанов Сабыржан Кубейсинович, Ибраева Айгерим Кайруллаевна
Формула / Реферат
МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С УПРАВЛЕНИЕМ НА ОСНОВЕ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
Изобретение относится к области робототехники, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. По меньшей мере, один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. Мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце, снабжен блоком управления с искусственным интеллектом для реализации функций автономного управления.
Сущность изобретения заключается в том, что мобильный роботехнический комплекс имеет независимую интеллектуальную систему, обеспечивающая эффективного функционирования системы навигации, систем энергообеспечения и системы приема-передачи данных в условиях отсутствия связи с интегрированным постом дистанционного управления.
Текст
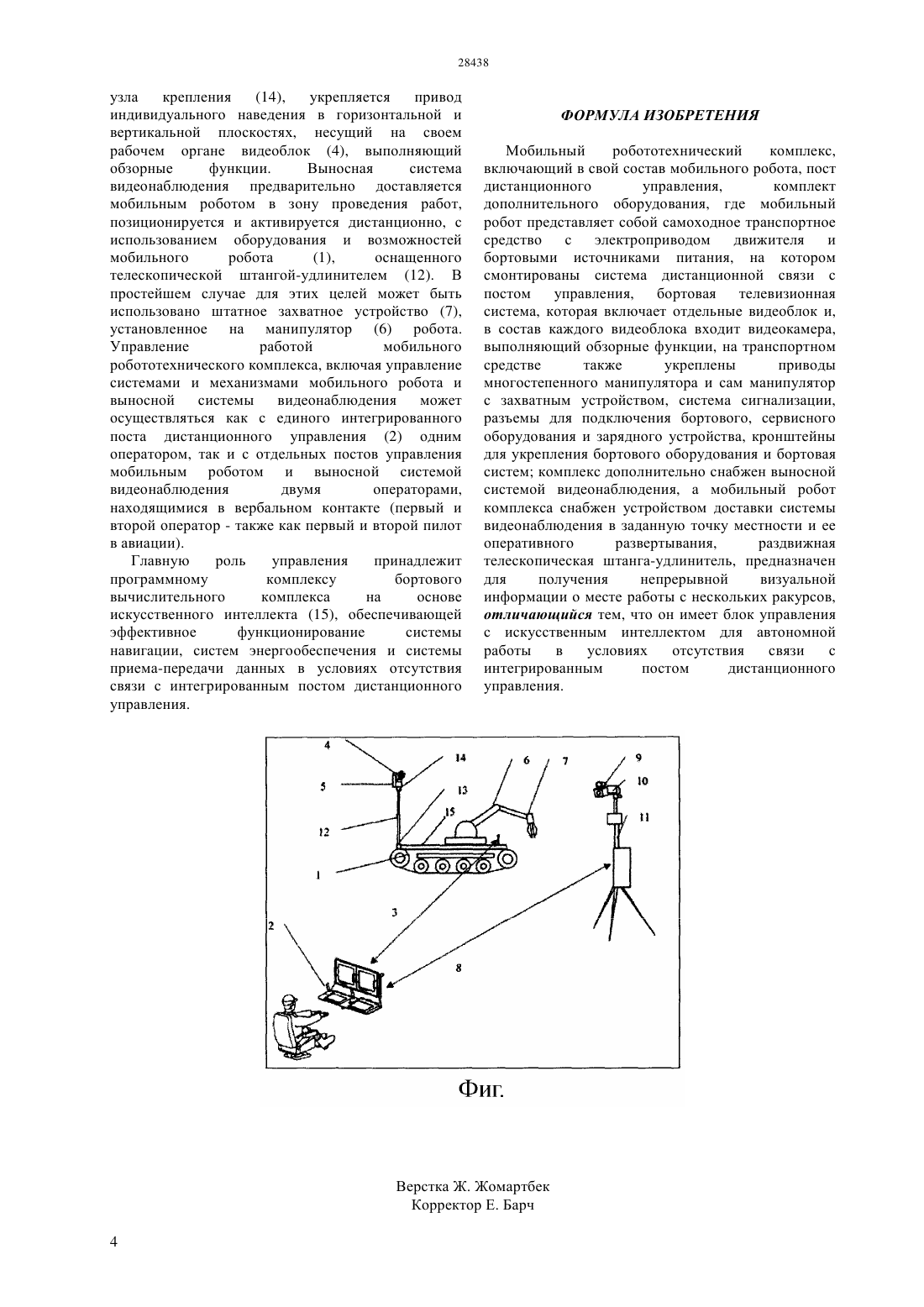
(51) 25 9/00 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ вертикальной плоскостях. Мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце, снабжен блоком управления с искусственным интеллектом для реализации функций автономного управления. Сущность изобретения заключается в том, что мобильный роботехнический комплекс имеет независимую интеллектуальную систему,обеспечивающая эффективного функционирования системы навигации, систем энергообеспечения и системы приема-передачи данных в условиях отсутствия связи с интегрированным постом дистанционного управления.(76) Атанов Сабыржан Кубейсинович Ибраева Айгерим Кайруллаевна(54) МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С УПРАВЛЕНИЕМ НА ОСНОВЕ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА(57) Изобретение относится к области робототехники, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему,которая включает отдельные видеоблоки. По меньшей мере, один из видеоблоков, выполняющий обзорные функции,расположен на рабочем органе привода индивидуального наведения в горизонтальной и Изобретение относится к области робототехники,а именно к робототехническим комплексам,предназначенным для дистанционной работы в труднодоступных для присутствия человека местах. Известен мобильный робототехнический комплекс -4, производство фирмы(ФРГ), предназначенный для работы с опасными объектами на предприятиях атомной энергетики и химической промышленности. Данный комплекс применяется также в составе комплекса 600 при выполнении работ с неразорвавшимися боеприпасами. Комплекс включает в свой состав самоходный робот, базовый пост управления роботом и комплект дополнительного оборудования. Самоходный робот комплекса -4 имеет корпус коробчатого типа, гусеничную ходовую часть с подрессоренными опорными катками, манипулятор, телекамеры переднего и заднего обзора. Манипулятор робота обладает 6 степенями свободы с возможностью вращения в горизонтальной плоскости на 360. Захватное устройство снабжено датчиком силы, который позволяет оператору контролировать усилие сжатия захватного устройства. Манипулятор может двигаться в вертикальной плоскости вверх на 100 и вниз на 80 относительно корпуса. Робот управляется по кабелю или по радио с центрального поста управления. В качестве дополнительного оборудования робот -4 может быть оснащен телекамерами с переменным фокусным расстоянием, дальномером и микрофоном для передачи речевых команд и другими специальными приспособлениями (Батанов А.Ф., Грицин С.Н.,Муркин С.В. Технология применения дистанционно управляемых мобильных комплексов, в журнале Специальная техника 3 за 2000 г., также эта статья имеется на интернет ресурсе/////2/2 Как следует из указанного источника, со ссылкой на опыт Чернобыля, для уверенного управления мобильным роботом комплекса -4 в ряде случаев появлялась необходимость получения непрерывной визуальной информации о месте работы с нескольких ракурсов, т.к. для непрерывного контроля местоположения перемещающегося робота в помещении и удобства работы оператора только телекамер, установленных на самом роботе,было недостаточно. В условиях операции,описанной в статье, внешнее видеонаблюдение было организовано с помощью подручных модулей из укрытия оператора. Таким образом, хотя комплекс -4 обладает сравнительно большими возможностями гибкого конфигурирования состава и структуры, однако ни одна из возможных стандартных конфигураций не дает возможности наблюдать со стороны за действиями,осуществляемыми посредством манипулятора, а также осуществлять координацию действий операторов при работе в зоне операции двух и более мобильных роботов или же координацию при работе одного робота на нескольких объектах,расположенных на расстоянии прямой видимости один от другого. 2 Наиболее близким к изобретению,по совокупности существенных признаков является мобильный робототехнический комплекс по патенту 2364500 от 31.10.2007. - прототип изобретения,включающий в свой состав мобильного робота,пост дистанционного управления,комплект дополнительного оборудования, где мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом управления,бортовая телевизионная система, которая включает отдельные видеоблоки, в состав каждого видеоблока входит видеокамера, выполняющий обзорные функции, на транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством,система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая систем комплекс дополнительно снабжен выносной системой видеонаблюдения, а мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания,раздвижная телескопическая штанга-удлинитель, предназначен для получения непрерывной визуальной информации о месте работы с нескольких ракурсов,увеличения эффективности использования и срок службы мобильного. При всех несомненных достоинствах мобильного робототехнического комплекса, он не предусматривает автономного функционирования в зонах с высоким уровнем электромагнитных помех или в случае нарушения работы аппаратуры связи с постом управления и что не позволит мобильному робототехническому комплексу выполнить поставленные перед ним задачи. От всех этих недостатков свободен мобильный робототехнической комплекс с управлением на основе искусственного интеллекта,что обеспечивает функционирования робота в зонах с высоким уровнем электромагнитных помех или в случае нарушения работы аппаратуры связи с постом управления. Сущность изобретения заключается в том, что мобильный робототехнический комплекс,включающий в свой состав мобильного робота, пост дистанционного 2 управления,комплект дополнительного оборудования, где мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом управления, бортовая телевизионная система, которая включает отдельные видеоблоки, в состав каждого видеоблока входит видеокамера,выполняющий обзорные функции, на транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством, система сигнализации, 28438 разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая систем комплекс дополнительно снабжен выносной системой видеонаблюдения, а мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания,раздвижная телескопическая штанга-удлинитель, предназначен для получения непрерывной визуальной информации о месте работы с нескольких ракурсов и снабжен блоком управления с искусственным интеллектом для реализации функций автономного управления. Технический результат применения настоящего изобретения является возможность мобильному робототехническому комплексу автономно принимать решения по управлению в условиях неполной или противоречивой информации, а также в случае нарушения работы аппаратуры связи с постом дистанционного управления. Сведения,подтверждающие возможность осуществления изобретения. Мобильный робототехнический комплекс включает в свой состав мобильный робот (1),интегрированный пост дистанционного управления(2), систему двусторонней связи (не показана) между постом (2) и роботом (1), обеспечивающую канал связи (3) и комплект дополнительного оборудования. В базовый комплект дополнительного оборудования входят различные устройства и механизмы, которыми оснащается робот, применительно к конкретной оперативной задаче. В этот комплект входят транспортная прицепная тележка, автомобильный эвакуатор,комплект губок схвата различной конфигурации,кронштейны-держатели разрушителей взрывоопасных предметов и другие элементы (не показаны). Собственно мобильный робот (1) представляет собой самоходное телеуправляемое транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной двусторонней связи с постом управления (2) и бортовая телевизионная система. Бортовая телевизионная система включает в себя отдельные видеоблоки,расположенные на звеньях манипулятора и на корпусе транспортного средства,в состав каждого видеоблока, в свою очередь,входит видеокамера, заключенная в защитный кожух с источниками подсветки. Один из видеоблоков (4), выполняющий обзорные функции,располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях (5). На транспортном средстве также укреплены приводы многостепенного манипулятора (не показаны) и сам манипулятор (6) с захватным устройством (7),система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами(не показаны). Отличительной особенностью комплекса является то, что он дополнительно укомплектован выносной системой видеонаблюдения с собственной системой связи и управления, обеспечивающей канал (8) связи и управления выносной системы видеонаблюдения и интегрированного поста дистанционного управления (2). Мобильный робот (1) комплекса снабжен также устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания. В качестве указанного устройства может быть использовано штатное захватное устройство (7), установленное на манипулятор (6) робота или иное устройство. Выносная система видеонаблюдения представляет собой видеоблок(9),укрепленный на двухстепенном приводе наведения (10), который, в свою очередь, располагается на штативе (11). На этом же штативе смонтирована система связи с базовым удаленным постом управления выносной системы, в качестве которого может быть использован или пост, интегрированный в общий пост (2) дистанционного управления мобильным робототехническим комплексом, или, как вариант,отдельный пост управления выносной системой видеонаблюдения (не показан). Кроме того, в комплект дополнительного оборудования мобильного робототехнического комплекса входит раздвижная телескопическая штанга-удлинитель(12), снабженная на одном конце узлом (13) вертикального крепления ее в кормовой части транспортного средства мобильного робота и на другом конце снабженная узлом (14) крепления привода (5) индивидуального наведения в горизонтальной и вертикальной плоскостях. Узлы крепления(14) выполнены унифицированными с узлами крепления других монтируемых на мобильный робот устройств (в частности видеоблоков) по типу ласточкин хвост с фиксацией винтами-барашками, что обеспечивает удобство монтажа. Телескопическая штанга-удлинитель(12) выполнена с возможностью изменения и фиксации ее длины. Мобильный робототехнический комплекс функционирует следующим образом. Для решения оперативной задачи,предусматривающей повышенную точность позиционирования самого мобильного робота,повышенную точность дистанционных манипуляций с удаленными предметами, во всех других случаях, когда необходимо получение непрерывной визуальной информации о месте работы с нескольких ракурсов,когда необходимо обеспечить улучшенный обзор окружающего мобильный робот пространства, - в этих случаях, мобильный робототехнический комплекс оснащается выносной системой видеонаблюдения и телескопической штангойудлинителем(12). Телескопическая штангаудлинитель (12) нижней своей частью укрепляется в кормовой части корпуса мобильного робота с помощью узла крепления (13). На верхней части телескопической штанги-удлинителя, с помощью 3(14),укрепляется привод индивидуального наведения в горизонтальной и вертикальной плоскостях, несущий на своем рабочем органе видеоблок (4), выполняющий обзорные функции. Выносная система видеонаблюдения предварительно доставляется мобильным роботом в зону проведения работ,позиционируется и активируется дистанционно, с использованием оборудования и возможностей мобильного робота(1),оснащенного телескопической штангой-удлинителем (12). В простейшем случае для этих целей может быть использовано штатное захватное устройство (7),установленное на манипулятор (6) робота. Управление работой мобильного робототехнического комплекса, включая управление системами и механизмами мобильного робота и выносной системы видеонаблюдения может осуществляться как с единого интегрированного поста дистанционного управления (2) одним оператором, так и с отдельных постов управления мобильным роботом и выносной системой видеонаблюдения двумя операторами,находящимися в вербальном контакте (первый и второй оператор - также как первый и второй пилот в авиации). Главную роль управления принадлежит программному комплексу бортового вычислительного комплекса на основе искусственного интеллекта (15), обеспечивающей эффективное функционирование системы навигации, систем энергообеспечения и системы приема-передачи данных в условиях отсутствия связи с интегрированным постом дистанционного управления. ФОРМУЛА ИЗОБРЕТЕНИЯ Мобильный робототехнический комплекс,включающий в свой состав мобильного робота, пост дистанционного управления,комплект дополнительного оборудования, где мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом управления, бортовая телевизионная система, которая включает отдельные видеоблок и,в состав каждого видеоблока входит видеокамера,выполняющий обзорные функции, на транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством, система сигнализации,разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая систем комплекс дополнительно снабжен выносной системой видеонаблюдения, а мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания,раздвижная телескопическая штанга-удлинитель, предназначен для получения непрерывной визуальной информации о месте работы с нескольких ракурсов,отличающийся тем, что он имеет блок управления с искусственным интеллектом для автономной работы в условиях отсутствия связи с интегрированным постом дистанционного управления.
МПК / Метки
МПК: B25J 9/00
Метки: мобильный, управлением, основе, робототехнический, интеллекта, комплекс, искусственного
Код ссылки
<a href="https://kz.patents.su/4-ip28438-mobilnyjj-robototehnicheskijj-kompleks-s-upravleniem-na-osnove-iskusstvennogo-intellekta.html" rel="bookmark" title="База патентов Казахстана">Мобильный робототехнический комплекс с управлением на основе искусственного интеллекта</a>
Мобильный медицинский лечебно – диагностический комплекс
Номер инновационного патента: 24636
Опубликовано: 15.09.2011
Авторы: Назарбаева Дарига Нурсултановна, Джайнакбаев Нурлан Темирбекович
Метки: мобильный, лечебно, диагностический, медицинский, комплекс
Формула / Реферат:
Изобретение относится к мобильным техническим средствам, предназначенным для использования в качестве консультационно-диагностических и лечебных центров, доставляемых в отдаленные и труднодоступные районы, а также в районы чрезвычайных ситуаций и эпидемических заболеваний. Расширение функциональных возможностей комплекса, обеспечение стерильных условий при оказании медицинских услуг достигается тем, что у мобильного медицинского лечебно-...
Мобильный сервисный комплекс
Номер инновационного патента: 21454
Опубликовано: 15.07.2009
Авторы: Бабченко Лев Андреевич, Кошик Александр Петрович
МПК: B60P 3/14
Метки: сервисный, мобильный, комплекс
Формула / Реферат:
Мобильный сервисный комплекс относится к ремонтно-технологическим средствам ремонтно-обслуживающих структур сервиса техники, в частности, к области ремонта и технического обслуживания сельскохозяйственных машин, тракторов и комбайнов в полевых условиях крупных сельхозформирований, включая машинно-технологические станции, платформу, контейнеры и в грани платформы или в одну из них встроены силовые валы с муфтами, а так же каждый контейнер имеет...
Мобильный гемодиализный комплекс
Номер инновационного патента: 27717
Опубликовано: 18.12.2013
Авторы: Назарбаева Дарига Нурсултановна, Джайнакбаев Нурлан Темирбекович
МПК: A61M 1/38, B60P 3/00, A61M 1/34...
Метки: комплекс, гемодиализный, мобильный
Формула / Реферат:
Изобретение относится к средствам для оказания экстренной помощи пациентам, живущим в отдаленных районах, где отсутствуют стационарные медицинские учреждения и медицинские пункты.Технический результат - исключение вибрации аппарата и повышение надежности - достигается тем, что у мобильного гемодиализного комплекса, содержащего по меньшей мере один аппарат для гемодиализа, установленный на базе автомобиля или автоприцепа с кузовом, включающий...
Мобильный пожарный комплекс
Номер полезной модели: 975
Опубликовано: 15.07.2013
Авторы: Боровский Алексей Юрьевич, Гаипов Бахитжан, Бояркин Сергей Иванович, Шипугин Сергей Николаевич, Абдусалямов Нурлан Нурбекович, Камалиев Ильдар Халилулович
МПК: A62C 27/00
Метки: пожарный, комплекс, мобильный
Формула / Реферат:
Мобильный пожарный комплекс относится к противопожарной технике и используется для локализации и (или) ликвидации пожаров в местностях, удаленных от пожарных частей. Технический результат от использования полезной модели - повышение эффективности пожарных работ, эксплуатационной надежности комплекса и сохранности противопожарного оборудования, расширение функциональных возможностей. Технический результат достигается за счет того, что комплекс...
Мобильный учебный демонстрационный комплекс
Номер полезной модели: 990
Опубликовано: 15.08.2013
Авторы: Рычагов Дмитрий Владимирович, Зеликман Борис Львович, Гапанович Валентин Александрович, Власов Владимир Васильевич, Ройзнер Александр Григорьевич, Певзнер Михаил Афанасьевич, Попов Юрий Иванович, Донской Александр Львович, Шихер Ян Герцович, Ярковский Федор Викторович
МПК: G09B 9/05
Метки: мобильный, учебный, демонстрационный, комплекс
Формула / Реферат:
Полезная модель относится к средствам обучения персонала на железнодорожном транспорте, а также к средствам для проведения рекламных, лекционных и культурно-массовых мероприятий. Заявленный мобильный учебный демонстрационный комплекс выполнен в виде железнодорожного вагона и может быть использован в составе передвижного выставочно-лекционного комплекса ОАО «РЖД».Заявлен мобильный учебный демонстрационный комплекс, содержащий транспортное...
Предыдущий патент: Неплавящийся электрод
Следующий патент: Способ модификации и упрочнения поверхностей деревянных конструкций
Случайный патент: Устройство для изготовления колбасных изделий без оболочки