Исполнительный механизм параллельного манипулятора типа трипод
Номер инновационного патента: 30337
Опубликовано: 15.09.2015
Авторы: Сартаев Куанышбек Заурбекович, Мырзагельдиева Жанат Муратбековна, Нурахметов Бауржан Кумаргалиевич

Формула / Реферат
Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ.
Техническим результатом изобретения является функциональное разделение работы приводов за счет выполнения поступательного, как отдельно, так и одновременно, движения его ведущих звеньев, позволяющего уменьшить массу и габариты манипулятора, а также упростить систему его управления.
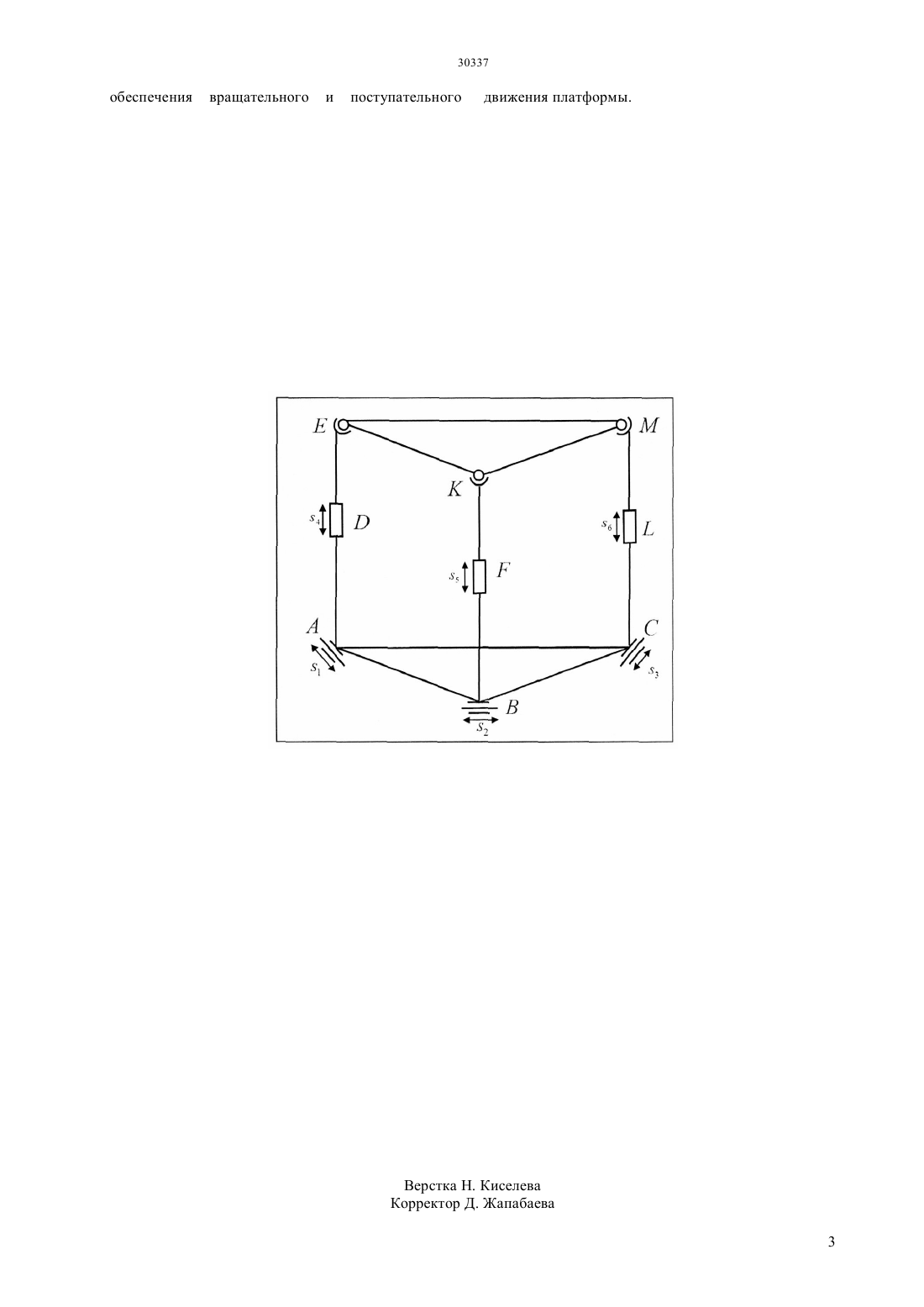
Это достигается тем, что в исполнительном механизме параллельного манипулятора типа трипод, содержащем стойку с шарнирами, платформу с шарнирами и гидравлические приводы, отличающийся тем, что стойка и платформа выполнены в виде треугольников, соединения между стойкой и платформой выполнены в виде трех двухзвенных пространственных кинематических цепей, которые соединены с вершинами стойки и между собой цилиндрическими, поступательными и сферическими шарнирами, а каждый шарнир ведущих звеньев соединен с приводами для обеспечения вращательного и поступательного движения платформы.
Текст
(51) 25 9/04 (2006.01) 25 9/06 (2006.01) 25 9/10 (2006.01) 05 11/00 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ счет выполнения поступательного, как отдельно, так и одновременно, движения его ведущих звеньев,позволяющего уменьшить массу и габариты манипулятора, а также упростить систему его управления. Это достигается тем, что в исполнительном механизме параллельного манипулятора типа трипод, содержащем стойку с шарнирами,платформу с шарнирами и гидравлические приводы,отличающийся тем, что стойка и платформа выполнены в виде треугольников, соединения между стойкой и платформой выполнены в виде трех двухзвенных пространственных кинематических цепей, которые соединены с вершинами стойки и между собой цилиндрическими,поступательными и сферическими шарнирами, а каждый шарнир ведущих звеньев соединен с приводами для обеспечения вращательного и поступательного движения платформы.(72) Нурахметов Бауржан Кумаргалиевич Сартаев Куанышбек Заурбекович Мырзагельдиева Жанат Муратбековна(73) Акционерное общество Алматинский технологический университет(54) ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНОГО МАНИПУЛЯТОРА ТИПА ТРИПОД(57) Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ. Техническим результатом изобретения является функциональное разделение работы приводов за Изобретение относится к машиностроению и может быть использовано для автоматизации ручных, монтажных, погрузочно-разгрузочных работ. Известен исполнительный механизм параллельного манипулятора,содержащий шестиугольную стойку с шестью сферическими шарнирами, шестиугольную платформу с шестью сферическими шарнирами, причем сферические шарниры стойки соединены со сферическими шарнирами платформы гидравлическими приводами, 1994, т. 821, фиг.1). Недостатком известного механизма параллельного манипулятора является наличие шести гидравлических приводов, обеспечивающих только вращательные движения шести ведущих звеньев, а шестиконтурное выполнение платформы и стойки с шестью кинематическими цепями увеличивает массу и габариты манипулятора, кроме того, отсутствует функциональное разделение работы приводов, тем самым усложняется система управления его работой. Задачей изобретения является разработка механизма,обеспечивающего функциональное разделение работы приводов за счет выполнения вращательного и поступательного движения его ведущих звеньев, позволяющего уменьшить массу и габариты манипулятора, а также упростить систему его управления. Технический результат изобретения достигается тем, что в известном исполнительном механизме параллельного манипулятора, содержащем стойку с шарнирами,платформу с шарнирами и гидравлические приводы, согласно изобретению,стойка и платформа выполнены в виде треугольников, соединения между стойкой и платформой выполнены в виде трех двухзвенных пространственных кинематических цепей, которые соединены с вершинами стойки и между собой цилиндрическими,поступательными и сферическими шарнирами, а каждый шарнир ведущих звеньев стойки соединен с двумя приводами для обеспечения вращательного и поступательного движения платформы. Сущность предлагаемого изобретения поясняется чертежом,где изображена кинематическая схема исполнительного механизма параллельного манипулятора типа трипод в произвольном положении платформы. Исполнительный механизм параллельного манипулятора типа трипод содержит стойку 1 и платформу 2, выполненные в виде треугольников и соединенные между собой тремя двухзвенными пространственными кинематическими цепями 3, 4, 5, 6 , 7, 8 , звенья которых соединены между собой, с вершинами платформы 2 и с вершинами стойки 1 цилиндрическими шарнирами , поступательными шарнирами(ведущими),т.к. вращаются и движутся поступательно от трех приводов (на чертеже не показаны) с заданными параметрами 1, 2, 3 поступательного перемещения. Поступательные шарнирыявляются входными (ведущими) и движутся поступательно от трех приводов (на чертеже не показаны) с заданными параметрами 4,5, 6 поступательного перемещения. Шесть приводов работают независимо друг от друга, три из которых обеспечивают поступательные движения цилиндрических шарниров , три других обеспечивают поступательные перемещения поступательных шарниров . Осуществление поступательного движения шарнировипередается через пространственные кинематические цепи на свободное движение платформы 2 в абсолютной системе координат . Такое выполнение механизма параллельного манипулятора обеспечивает функциональное разделение работы приводов за счет выполнения поступательного движения его ведущих звеньев. Выполнение стойки и платформы в виде треугольников позволяют уменьшить массу и габариты манипулятора, все это позволяет упростить систему его управления. Исполнительный механизм параллельного манипулятора типа трипод работает следующим образом Движение от приводовипри заданных поступательных параметрах 1, 2, 3, 4, 5, 6 через цилиндрическиеи поступательные шарниры через звенья пространственных кинематических цепей 3, 4 , 5, 6 , 7, 8, передается на платформу 2, которая свободно перемещается в пространстве. При изменении только величин поступательных параметров 1, 2, 3 или 4, 5, 6 или при их одновременном изменении их величин соответственно изменяется и движение платформы 2. Предлагаемая конструкция исполнительного механизма параллельного манипулятора типа трипод позволяет обеспечить функциональное разделение работы приводов за счет выполнения поступательного движения ведущих звеньев упростить систему управления манипулятора,уменьшить массу и габариты манипулятора. ФОРМУЛА ИЗОБРЕТЕНИЯ Исполнительный механизм параллельного манипулятора типа трипод, содержащий стойку с шарнирами,платформу с шарнирами и гидравлические приводы, отличающийся тем, что стойка и платформа выполнены в виде треугольников, соединения между стойкой и платформой выполнены в виде трех двухзвенных пространственных кинематических цепей, которые соединены с вершинами стойки и между собой цилиндрическими,поступательными и сферическими шарнирами, а каждый шарнир ведущих звеньев соединен с приводами для
МПК / Метки
МПК: B25J 9/06, B25J 9/04, G05G 11/00, B25J 9/10
Метки: исполнительный, типа, параллельного, трипод, механизм, манипулятора
Код ссылки
<a href="https://kz.patents.su/3-ip30337-ispolnitelnyjj-mehanizm-parallelnogo-manipulyatora-tipa-tripod.html" rel="bookmark" title="База патентов Казахстана">Исполнительный механизм параллельного манипулятора типа трипод</a>
Предыдущий патент: Внутренний люнет
Следующий патент: Композиция для изготовления древесностружечных плит
Случайный патент: Водоудерживающее вещество для цементирующих композиций и содержащая его цементирующая композиция