Передвижной робот, содержащий манипулятор

Текст
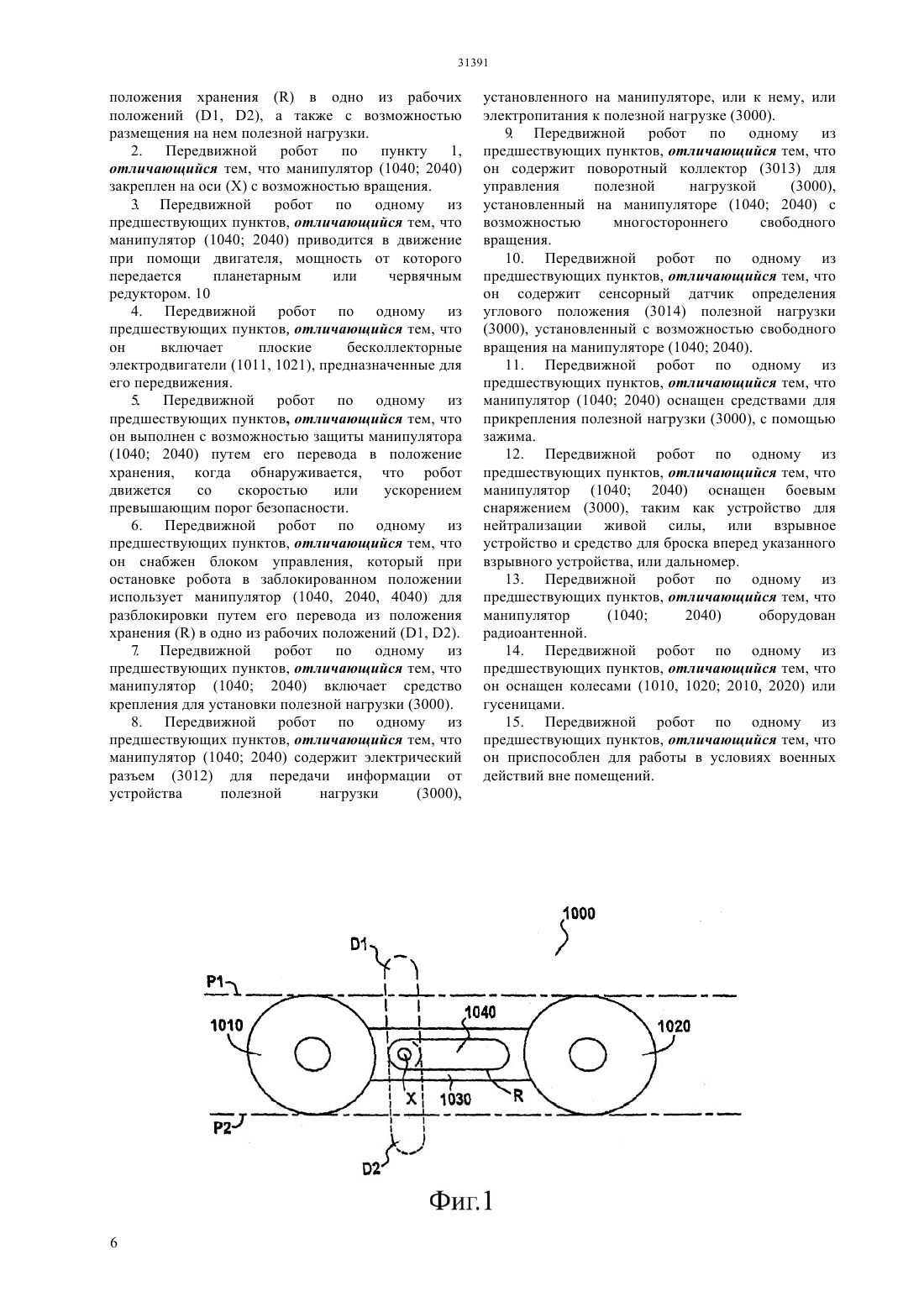
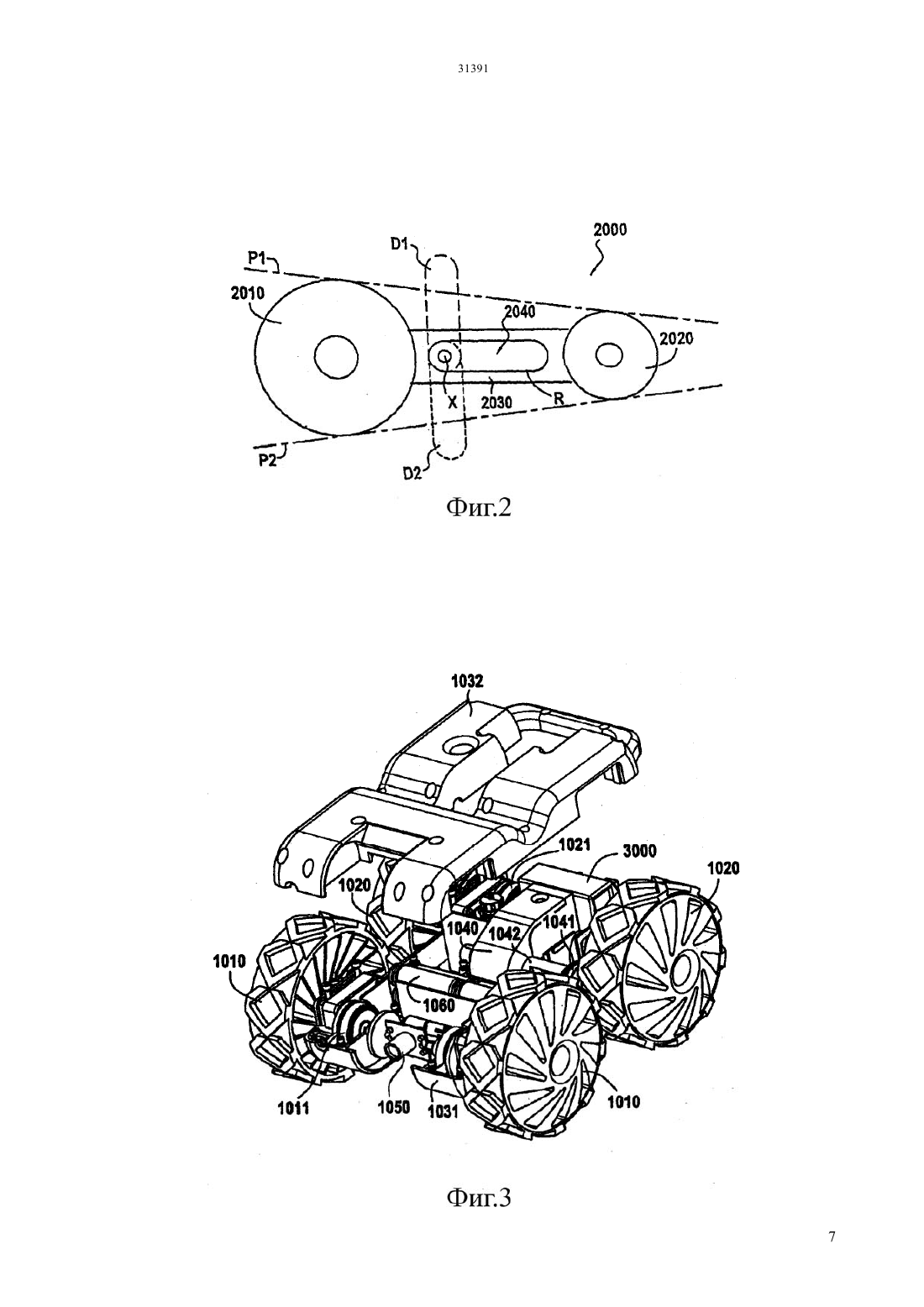
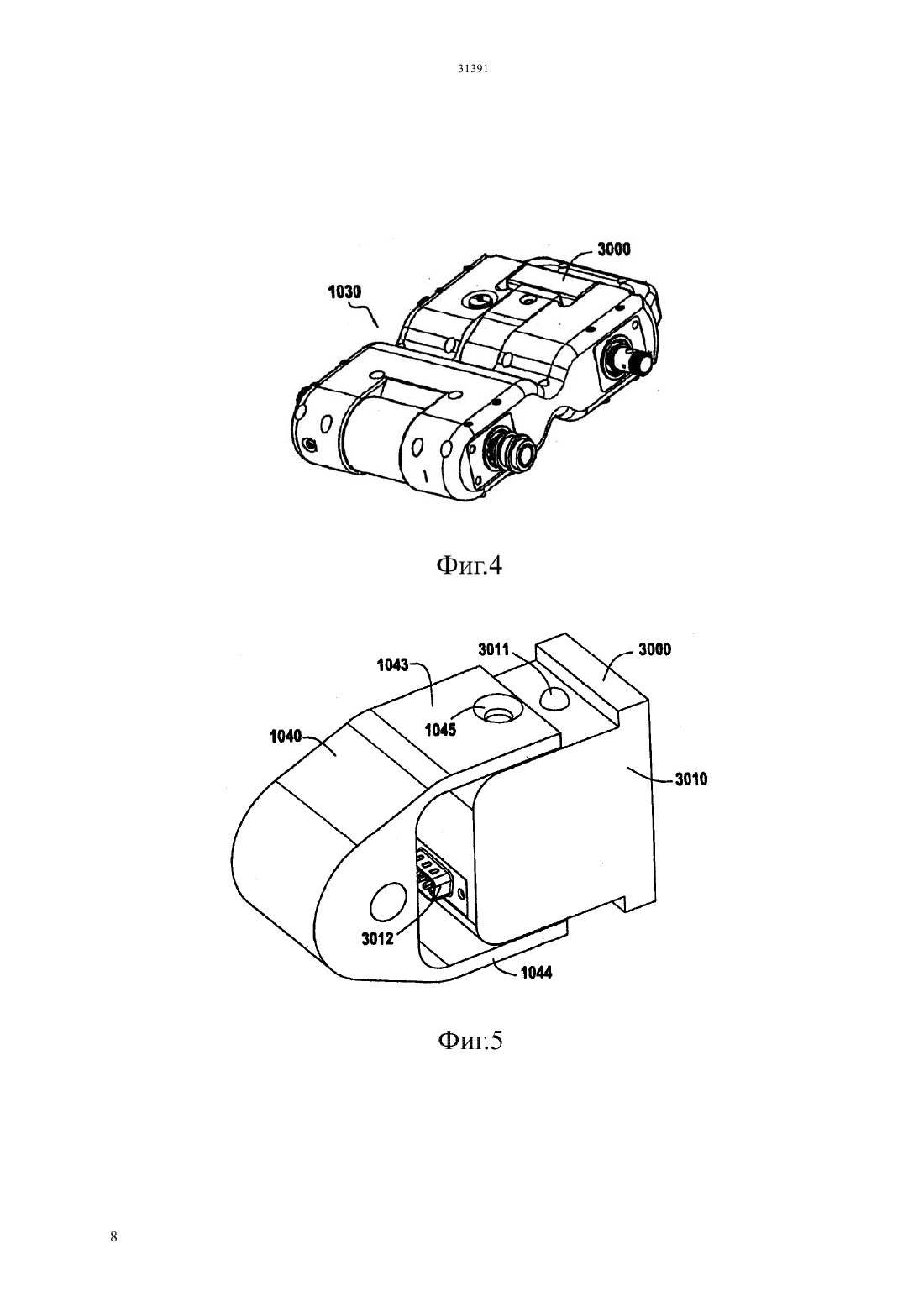
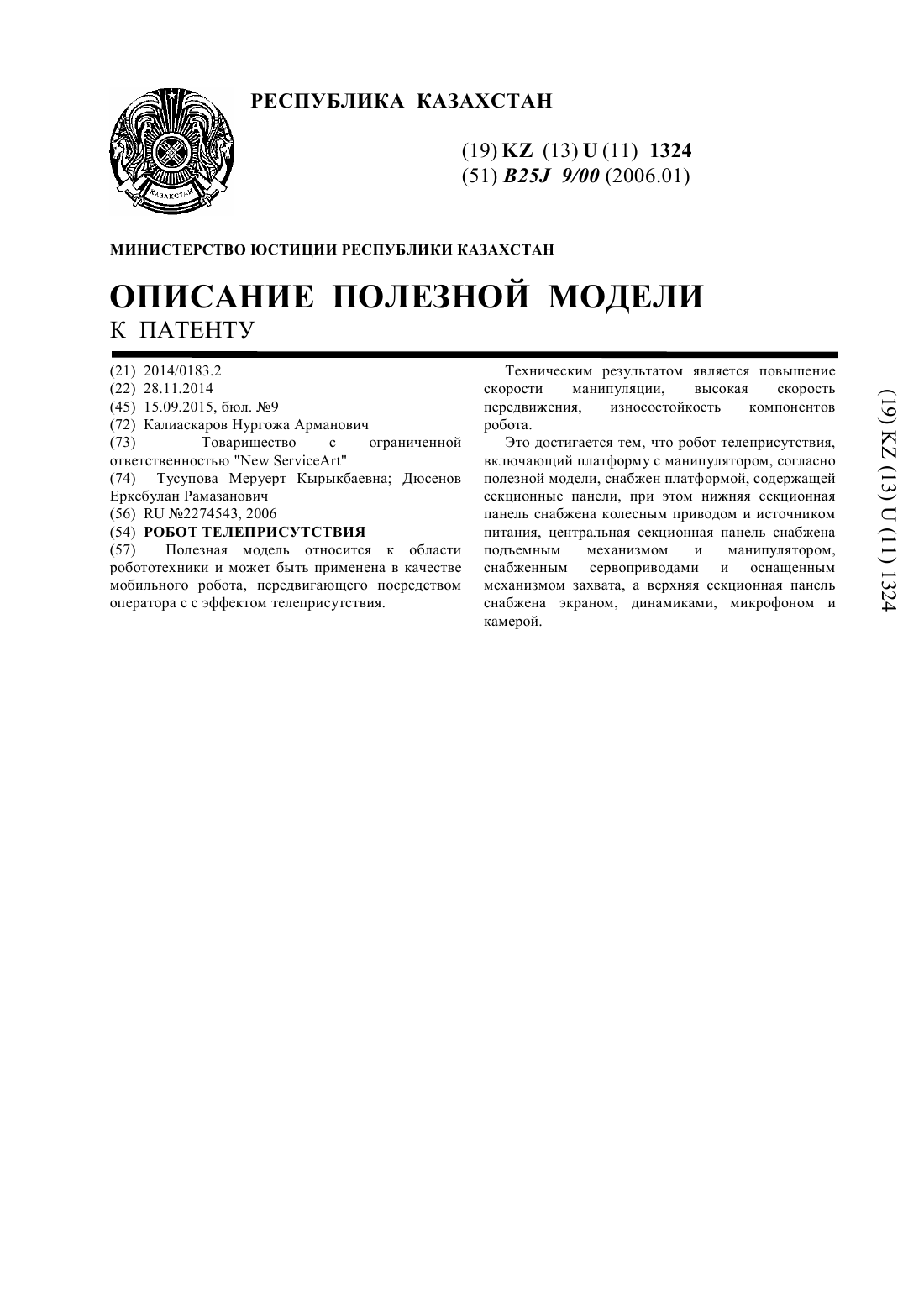
(51) 25 5/00 (2006.01) 62 57/024 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(1000), включающему средства передвижения (1010,1020) которые позволяют ему передвигаться параллельно первой плоскости движения (Р 1) или,альтернативно, параллельно второй плоскости движения (Р 2), а также корпус (1030), объем которого ограничен пространством между двумя плоскостями движения (1 Р 2). Изобретение характеризуется тем, что робот включает манипулятор (1040), установленный в корпусе и принимающий либо положение хранения , в котором он расположен между двумя плоскостями движения, либо первое рабочее положение (1), в котором он выступает через первую плоскость движения (Р 1), либо второе рабочее положение(2), в котором он выступает через вторую плоскость движения (Р 2).(74) Шабалина Галина Ивановна Шабалин Владимир Иванович Тусупова Меруерт Кырыкбаевна Локтева Юлия Михайловна Область техники, к которой относится изобретение - известный уровень техники Данное изобретение относится к передвижным роботам для профессионального использования, и более конкретно, для использования в военных целях или для применения в гражданской обороне. Такие роботы передвигаются за счет использования колес или гусениц и оснащены различными устройствами, среди которых камеры и детекторы, установленные на корпусе, занимающем часть пространства между колесами или гусеницами. Они перемещаются на расстоянии от человека-оператора, зачастую в неблагоприятных условиях окружающей среды, и управляются по радио. Они могут быть предназначены традиционно для обнаружения и обезвреживания мин, но также, в более общем смысле, для проверки внутренних или внешних объектов,таких как внутренние помещения или улицы в районе боевых действий. Известен роботкомпании , который перемещается при помощи гусениц и который может быть оснащен в боевой обстановке шарнирно установленным манипулятором для обнаружения взрывного устройства с целью его обезвреживания. Такой робот, несмотря на то, что он миниатюризирован, достаточно тяжел и с трудом может переноситься человеком в руках или в сумке. Также известен роботкомпании, который также может быть оснащен шарнирным манипулятором для обнаружения взрывного устройства с целью его обезвреживания. Он перемещается со скоростью, которая также ограничена и не соответствует требованиям ситуаций, возникающих в условиях боевых действий. Робот характеризуется низким дорожным просветом. Робот под названием , представлен компанией . Он может забрасываться оператором вручную. Этот робот - плоский и содержит гусеницы или колеса, позволяющие ему передвигаться на одной стороне или же в перевернутом состоянии. Его корпус полностью заключен между обеими плоскостями передвижения. Изображение, получаемое от установленной на нем камеры, ограничено стороной направления, в которое движется робот. Данный робот, в частности, в его модификации с колесами,не содержит средств для его выхода из ситуации, в которой он блокирован камнями или иными препятствиями. Раскрытие сущности изобретения преимущества, возникающие при его использовании Для обеспечения безопасности персонала,задействованного в зонах повышенной опасности,целесообразно создавать роботы, способные выполнять наиболее опасные задачи. Таким образом, целесообразно, чтобы робот мог нейтрализовать неприятеля, быстро напав на него после сближения, например, в условиях боевых действий в городских условиях. В частности, в данной области применения важно, чтобы робот был легковесным для того,2 чтобы он мог запускаться оператором вручную, и чтобы затем мог быстро передвигаться,непосредственно после того, как он будет запущен,а также, чтобы он мог продолжать движение без внезапных остановок после столкновения с любым препятствием, таким как бордюрный камень,булыжник или стена. Таким образом, целесообразно иметь роботы,способные участвовать в ближнем бою. Однако,такие роботы могут также применяться в условиях гражданской жизни, а именно, для слежения за порядком в местах заключения или для оказания содействия в поддержании порядка в условиях массовых общественных волнений. Для решения этих задач объектом данного изобретения является передвижной робот,включающий средства передвижения, которые позволяют ему передвигаться параллельно первой плоскости движения или,альтернативно,параллельно второй плоскости движения, а также корпус, объем которого ограничен пространством между двумя плоскостями движения,характеризующийся тем, что он также включает манипулятор, установленный в корпусе и принимающий либо положение хранения, в которой он расположен между двумя плоскостями движения,либо первое рабочее положение, в котором он выступает через первую плоскость движения, либо второе рабочее положение, в котором он выступает через вторую плоскость движения. Этот робот является переносным и имеет возможность переворачиваться, потому что он может передвигаться параллельно одной плоскости движения или другой плоскости движения. Помимо этого, можно благодаря наличию манипулятора быстро выходить из ситуации, в которой путь отхода был бы прегражден камнями или иными препятствиями, расположенными на земле. Таким образом, данное устройство является простым в использовании и скоростным, следовательно,эффективным в боевых условиях, к примеру, для перехвата неприятеля. Манипулятор может также служить для переноса полезной нагрузки, такой как измерительный прибор или взрывное устройство или устройство для нейтрализации живой силы. Полезная нагрузка защищается таким образом, чтобы привести в соответствие функцию манипулятора по освобождению от полезной нагрузки и функцию обеспечения защиты полезной нагрузки. В различных примерах осуществления изобретения,этот робот предпочтительно характеризуется следующим образом. Прежде всего, манипулятор может быть закреплен на оси с возможностью вращения вокруг нее. Исполнение изобретения отличается простотой,поскольку простое соединение позволяет использовать широкий диапазон полезной нагрузки. Может быть использован большой по размеру манипулятор,расположенный в сложенном положении в объеме корпуса, который может быть выдвинут за пределы любой из плоскостей движения, с основной частью манипулятора,выступающей наружу. Манипулятор может перемещаться при помощи двигателя, мощность от которого передается к нему планетарным или червячным редуктором. Червячный редуктор предпочтителен в случае, когда манипулятор должен переносить тяжлый груз, а планетарный редуктор используется если манипулятор должен возвращаться в сложенное положение вручную оператором. Кроме того, робот включает, в своем воплощении функцию для защиты манипулятора. Эта функция позволяет управлять перемещением манипулятора в положение хранения, когда обнаруживается, что робот движется со скоростью или ускорением,превышающим порог безопасности. В соответствии с изобретением манипулятор включает средства крепления для установки полезной нагрузки. Манипулятор может также включать поверхность соединения для крепления полезной нагрузки,образованного двумя параллельными плоскостями,направленными лицевыми сторонами друг к другу. Манипулятор может включать в определенных конфигурациях оборудования электрический разъем для передачи информации от полезной нагрузки,устанавливаемой на манипуляторе, или к ней, или для подачи электропитания к полезной нагрузке. Робот может также включать поворотный коллектор для управления полезной нагрузкой,установленный на манипуляторе с возможностью многостороннего свободного вращения. Кроме того,он может включать сенсорный датчик определения углового положения полезной нагрузки, имеющий возможность свободного вращения, установленный на манипуляторе. Манипулятор может быть оснащен средствами для прикрепления полезной нагрузки с помощью зажима. Робот может также включать боевое снаряжение,которое уже прикреплено к манипулятору. Таким образом, в данном случае, манипулятор оснащен боевым снаряжением, а именно, устройством для нейтрализации живой силы, или взрывным устройством и средством для броска вперед указанного взрывного устройства, или дальномером. Робот может иметь блок управления, который при остановке робота в заблокированном положении использует манипулятор для своего разблокирования путем его перевода из положения хранения в одно из рабочих положений. В определенных областях применения,манипулятор может также включать радиоантенну. Предпочтительно, робот оснащен плоскими бесколлекторными электродвигателями для обеспечения его передвижения, что позволяет сэкономить пространство в корпусе робота для того,чтобы разместить манипулятор в сложенном положении хранения. Эти электродвигатели позволяют роботу перемещаться на очень высокой скорости. Передвижной робот в специальном исполнении в частности, предназначен для военных операций вне помещений. В связи с этим он характеризуется, к примеру,водонепроницаемой конструкцией,использованием материалов, устойчивых к плесени,а также устойчивых к солнечной радиации и огню,таких как полиуретан для изготовления его корпуса. Таким образом, робот может использоваться на поле боевых действий на открытом воздухе, и может проявлять высокую устойчивость и сопротивляемость сложным условиям, которым он может подвергаться. Робот оснащен колесами, более легкими, чем гусеницы, однако при этом он может преодолевать возможное блокирование препятствиями при помощи своего манипулятора. Таким образом, он может передвигаться очень быстро в любых обстоятельствах и действовать быстро в затруднительных ситуациях, в которых оператор желает использовать его. Краткое описание рисунков Данное изобретение далее будет описано со ссылкой на следующие прилагаемые фигуры чертежей. На Фиг.1 показан схематический вид в разрезе устройства по изобретению. На Фиг.2 показан схематический вид в разрезе альтернативного варианта осуществления устройства, приведенного на Фиг.1. На Фиг.3 показан вид в перспективе детально представленного устройства по изобретению, на котором робот приведен с крышкой в открытом положении. На Фиг.4 показан вид корпуса робота,изображенного на Фиг.3, с крышкой в закрытом положении. На Фиг.5 показан узел крепления полезной нагрузки к манипулятору робота, изображенного на Фиг.3 и 4. На Фиг.6 показан тот же узел с прикрепленной полезной нагрузкой. На Фиг.7 и 8 показана внутренняя часть полезной нагрузки, установленной на манипуляторе робота в частном случае осуществления изобретения. На Фиг.9 показан робот с манипулятором в рабочем 5 положении, оснащенном дальномером. На Фиг.10 показан схематический вид в разрезе еще одного варианта осуществления изобретения. Подробное описание На Фиг.1, робот 1000 показан схематично на виде в разрезе. Робот 1000 включает два коаксиальных передних колеса 1010 и два коаксиальных задних колес 1020, с осью вращения,параллельной оси передних колес 1010. Задние колеса 1020 имеют тот же диаметр, что и передние колеса 1010. Робот 1000 также включает корпус 1030,имеющий толщину, меньшую, чем диаметр колес, и размещенный в прямоугольном пространстве,определяемом размещением колес. Колеса прикреплены к данному корпусу 1030, и робот 1000 имеет, в целом, плоскость симметрии, проходящую сквозь оси колес. Колеса определяют две плоскости,на которых робот может размещаться и передвигаться плоскость Р 1 и плоскость Р 2,3 которые при этом параллельны, поскольку передние и задние колеса имеют один и тот же диаметр. Таким образом, робот имеет стороны, имеющие идентичные функции с точки зрения передвижения,которое определяют две плоскости движения Р 1 и Р 2. Робот 1000 оснащен манипулятором 1040,который может быть соединен с возможностью вращения относительно оси , расположенной параллельно и в одной плоскости с осями колес. Манипулятор 1040 может принимать, минимум, три положения. Первое положение представляет собой положение хранения , в которой манипулятор размещен внутри объема корпуса, или же, как минимум, размещен без выхода за пределы одной из плоскостей Р 1 или Р 2. Таким образом, робот 1000 может передвигаться безразлично какой стороной вверх, когда манипулятор 1040 находится в положении хранения, при этом манипулятор 1040 размещен между обеими плоскостями движения. Другие два положения являются рабочими положениями, именуемыми 1 и 2, в которых манипулятор выступает через любую одну из плоскостей Р 1 или Р 2. При этом рабочее положение создается путем поворота на 90 от положения хранения, однако, поворот на меньший угол может быть достаточным для достижения положения,позволяющего манипулятору выдвинуться через любую одну из плоскостей и получить возможность применения. Манипулятор 1040 обеспечивает, в частности,выполнение двух функций он может переносить полезную нагрузку, которая будет описана подробно далее по тексту, и также может использоваться роботом для выхода из блокированного положения,в котором путь для него на земле прегражден камнями или иными препятствиями, за счет перемещения из положения хранения в рабочее положение в сторону плоскости Р 1 или Р 2, на которую робот опирается, когда его движение заблокировано. На Фиг.2, показано схематическое изображение альтернативного варианта робота, изображенного на Фиг.1. Передние и задние колеса имеют различный диаметр, а плоскости движения Р 1 и Р 2 не параллельны друг другу. Что касается Фиг.1, а также Фиг.2, можно отметить, что робот может в принципе иметь переднюю часть и заднюю часть, которые различны и предусматривают некоторое преимущество при движении вперд, однако, поскольку робот способен передвигаться как в прямом, так и в обратном направлении, нет оснований указывать на какоелибо различие в данном устройстве между передней частью и задней частью. На Фиг.3, робот 1000 показан с корпусом 1030 в открытом положении, при разделения двух половин 1031 и 1032 крышки. Данная крышка, к примеру,изготовлена из полиуретана, однако, также могут использоваться и другие материалы, такие как акрилонитрил, бутадиен, стирол, в зависимости от окончательного выбора конструкции. Корпус опирается на четыре колеса 1010 и 1020,каждое из которых приводится во вращение плоским бесколлекторным электродвигателем 1011 и 1021. Эти электродвигатели не зависят друг от друга и получают питание от аккумуляторов(не показан), получающим команды по радио. Колеса не управляемы, однако, регулирование скорости вращения левых и правых колес позволяет поворачивать робот в одну или в другую сторону. Они могут позволять роботу двигаться на высоких скоростях, например, до 20 км/ч. Робот оснащен камерой 1050, расположенной между передними колесами на корпусе 1030. Камера 1050 является многонаправленной камерой. Робот может быть оснащен четырьмя камерами,некоторые из которых могут обеспечивать наблюдение в ночных условиях с высоким разрешением. Робот 1000 включает манипулятор 1040, как было упомянуто выше, который находится в сложенном положении на Фиг.3. Этот манипулятор 1040 установлен с возможностью поворота и приводится в действие двигателем 1041,воздействующим через планетарный или червячный редуктор 1042. В областях применения, в которых манипулятор предназначен для переноски тяжелых грузов, к примеру, порядка десяти килограммов взрывчатого вещества,предпочтительно использование червячного редуктора. В областях применения, в которых оператор должен будет складывать манипулятор вручную, будет использоваться планетарный редуктор. Здесь манипулятор изображен с полезной нагрузкой в форме прямоугольного параллелепипеда 3000. Она имеет корпус,соответствующий форме полости в объеме корпуса,определяемой крышкой 1031, 1032, при этом больший размер полезной нагрузки 3000 расположен параллельно осям колес. На Фиг.4 изображен корпус 1030 робота в закрытом положении, без колес. Виден манипулятор 1040, а также полезная нагрузка 3000, которая расположена на его конце. Данный манипулятор находится в сложенном положении хранения. На Фиг.5 представлен элемент манипулятора 1040 и основание 3010 полезной нагрузки 3000. Данный элемент манипулятора имеет общую форму зажима, с двумя зажимными элементами 1043 и 1044. В каждом из этих двух элементов просверлено отверстие 1045, в который входит шарообразный элемент 3011 для фиксации полезной нагрузки,которая вставляется и удерживается действием зажима. При этом не исключаются другие способы фиксации. На Фиг.6 изображено размещение полезной нагрузки в зажиме на манипуляторе 1040. В частности, можно видеть, что из нижней части отверстия 1045 выступает шарообразный элемент 3011. Внешняя форма основания полезной нагрузки соответствует внутренней форме зажима манипулятора. При этом можно отметить, что поверхность соединения между манипулятором и основанием полезной нагрузки состоит из двух параллельных поверхностей, а именно, из двух внутренних поверхностей зажимных элементов 1043 и 1044. Можно было бы принять другую геометрию,в частности,сцепление при помощи цилиндрического крепежного вкладыша или конической направляющей поверхности. Кроме того,вместо применения зажима,можно использовать другие крепления, например с помощью винтовых соединений. На Фиг.7 показана внутренняя часть основания полезной нагрузки 3000 и его взаимодействие с манипулятором 1040. Полезная нагрузка,представленная на Фиг.7 представляет собой лазерный дальномер, который установлен с возможностью свободного непрерывного вращения,и который во время эксплуатации не должен прекращать вращение и повторно запускаться в обратном направлении. Как можно видеть на Фиг.5,на конце основания 3010 расположен электрический штекер 3012, который может подсоединяться при присоединении полезной нагрузки к манипулятору в соответствующем разъеме. Это электрическое соединение не только позволяет подавать электричество к устройствам полезной нагрузки, но также передавать им команды и получать в ответ информацию, в том числе вырабатываемую этими устройствами. Помимо этого, основание полезной нагрузки включает вращающийся коллектор 3013 для управления дальномером, установленным на манипуляторе с возможностью свободного вращения. Основание также включает сенсорный датчик 3014 для определения углового положения дальномера, который может поворачиваться оператором. Кроме того, предусмотрен двигатель 3015 для поворота полезной нагрузки вокруг оси,параллельной направлению манипулятора. Указанные элементы также видны на Фиг.8. В определенных областях применения,манипулятор 1040 может также включать радиоантенну 1046, в частности, радиоантенну ближнего или дальнего действия. Она видна на Фиг.7 и находится на наружной поверхности одного из двух зажимных элементов манипулятора. Манипулятор может быть оснащен любыми типами снаряжения, при его размещении на основании 3010, изображенном на Фиг.5 и 6. В частности, он может быть оснащен устройством для нейтрализации живой силы, таким как стрелковое оружие, генератор световых вспышек, генератор дыма или электрошокер. Боевым снаряжением может также быть взрывное устройство,оснащенное средством для броска вперед на некоторое расстояние. На Фиг.9 изображен дальномер 3001, который закреплен на конце манипулятора 1040, с помощью основания 3010. Дальномер установлен со свободным вращением для непрерывного многооборотного вращения по отношению к основанию. На этой фигуре показано рабочее положение манипулятора 1040. Вместо дальномера можно также установить камеру. Кроме того, робот имеет автоматическую функцию для защиты манипулятора, управляя его втягиванием в положение хранения, когда обнаруживается, что робот движется со скоростью или ускорением выше порога безопасности. Робот может также иметь блок управления,который при остановке робота в заблокированном положении использует манипулятор для разблокировки путем изменения его положения от положения храненияк одному из рабочих положений 1 или 2. На Фиг.10 показано альтернативное выполнение манипулятора робота. При этом манипулятор,обозначенный 4040, находится по отношению корпуса 1030 робота перпендикулярно плоскости,определяемой колесами. Он имеет свой больший размер, меньшим чем расстояние между обеими плоскостями движения Р 1 и Р 2. В сложенном положении, он не выступает за пределы плоскости Р 1 или плоскости Р 2. В рабочем положении он выдвигается через первую или вторую из этих плоскостей. Робот может использовать манипулятор для своего выхода из заблокированного положения,в которой путь ему прегражден препятствиями. Робот может быть оснащен двумя гусеницами или оснащен колесами, в частности, тремя,четырьмя или шестью колесами. Корпус робота может включать оболочку, изготовленную из полиуретана или акрилонитрила, бутадиена,стирола, при этом предпочтительно использовать полиуретан из-за его прочностных характеристик. Шины колес также предпочтительно изготавливаются из полиуретана. Конструкция выполняется в водонепроницаемом и огнестойком исполнении. Данное изобретение описано со ссылками на чертежи, на которых изображены конкретные примеры воплощения, однако, оно распространяется на все альтернативные варианты в объеме притязаний формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Передвижной робот (1000 2000), включающий средства передвижения (1010, 1020 2010, 2020) которые позволяют ему передвигаться параллельно первой плоскости движения(Р 1) или,альтернативно, параллельно второй плоскости движения (Р 2), а также корпус (1030 2030), объем которого ограничен пространством между двумя плоскостями движения(1,2),причем передвижной робот включает манипулятор (1040 2040), установленный в корпусе и принимающий либо положение хранения , в котором он расположен между двумя плоскостями движения,либо первое рабочее положение (1), в котором он выступает через первую плоскость движения (Р 1),либо второе рабочее положение (2), в котором он выступает через вторую плоскость движения (Р 2) отличающийся тем, что манипулятор выполнен с возможностью освобождения робота из положения,в котором он заблокирован, путем перевода из 5 положения храненияв одно из рабочих положений (1, 2), а также с возможностью размещения на нем полезной нагрузки. 2. Передвижной робот по пункту 1,отличающийся тем, что манипулятор (1040 2040) закреплен на осис возможностью вращения. 3. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор (1040 2040) приводится в движение при помощи двигателя, мощность от которого передается планетарным или червячным редуктором. 10 4. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он включает плоские бесколлекторные электродвигатели (1011, 1021), предназначенные для его передвижения. 5 Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он выполнен с возможностью защиты манипулятора(1040 2040) путем его перевода в положение хранения, когда обнаруживается, что робот движется со скоростью или ускорением превышающим порог безопасности. 6. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он снабжен блоком управления, который при остановке робота в заблокированном положении использует манипулятор (1040, 2040, 4040) для разблокировки путем его перевода из положения храненияв одно из рабочих положений (1, 2). 7. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор (1040 2040) включает средство крепления для установки полезной нагрузки (3000). 8. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор (1040 2040) содержит электрический разъем (3012) для передачи информации от устройства полезной нагрузки установленного на манипуляторе, или к нему, или электропитания к полезной нагрузке (3000). 9. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он содержит поворотный коллектор (3013) для управления полезной нагрузкой(3000),установленный на манипуляторе (1040 2040) с возможностью многостороннего свободного вращения. 10. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он содержит сенсорный датчик определения углового положения (3014) полезной нагрузки(3000), установленный с возможностью свободного вращения на манипуляторе (1040 2040). 11. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор (1040 2040) оснащен средствами для прикрепления полезной нагрузки (3000), с помощью зажима. 12. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор (1040 2040) оснащен боевым снаряжением (3000), таким как устройство для нейтрализации живой силы, или взрывное устройство и средство для броска вперед указанного взрывного устройства, или дальномер. 13. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор(1040 2040) оборудован радиоантенной. 14. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он оснащен колесами (1010, 1020 2010, 2020) или гусеницами. 15. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он приспособлен для работы в условиях военных действий вне помещений.
МПК / Метки
МПК: B25J 5/00, B62D 57/024
Метки: передвижной, содержащий, манипулятор, робот
Код ссылки
<a href="https://kz.patents.su/11-31391-peredvizhnojj-robot-soderzhashhijj-manipulyator.html" rel="bookmark" title="База патентов Казахстана">Передвижной робот, содержащий манипулятор</a>
Робот телеприсутствия
Номер полезной модели: 1324
Опубликовано: 15.09.2015
Автор: Калиаскаров Нургожа Арманович
МПК: B25J 9/00
Метки: телеприсутствия, робот
Формула / Реферат:
Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия.Техническим результатом является повышение скорости манипуляции, высокая скорость передвижения, износостойкость компонентов робота.Это достигается тем, что робот телеприсутствия, включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей...
Манипулятор
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
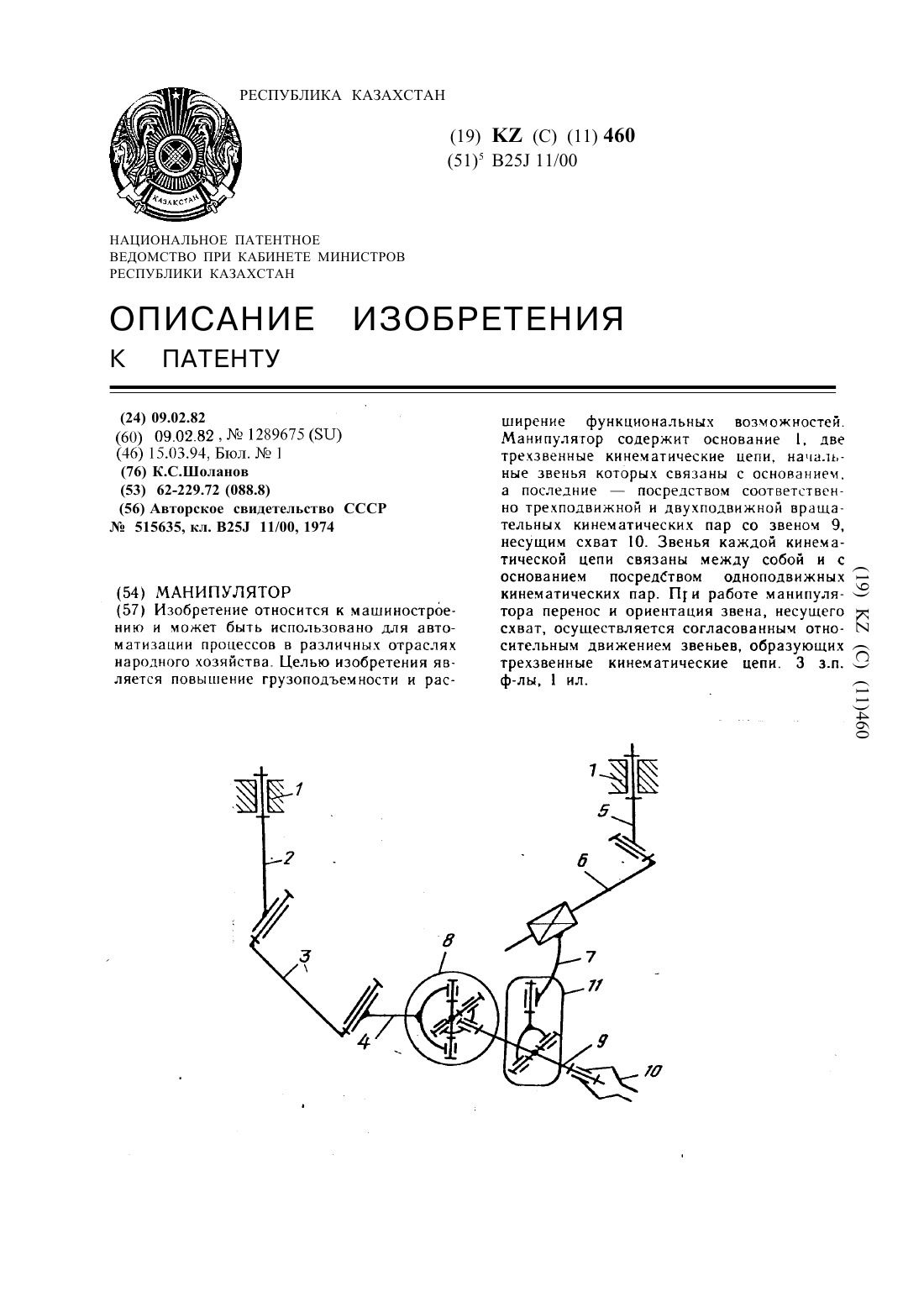
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Джамалов Нутпулла Камалович, Слуцкий Леонид Иосифович, Джолдасбеков Умирбек Арисланович, Измамбетов Мырзабай Базарбаевич
МПК: B25J 9/00
Метки: робот, промышленный
Формула / Реферат:
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно...
Составной передвижной путепровод
Номер инновационного патента: 25321
Опубликовано: 20.12.2011
Авторы: Лигай Аркадий Борисович, Амрашев Султанбек Балташевич, Королев Дмитрий Евгеньевич, Кадыров Адиль Суратович, Мулдагалиев Зура Абуович, Кондратьев Михаил Александрович
МПК: E01D 22/00, E01D 4/00, E01D 1/00...
Метки: путепровод, передвижной, составной
Формула / Реферат:
Изобретение относится к дорожному строительству и может быть использовано при строительстве транспортных развязок, преимущественно городских, пропускная способность которых достигла или превысила расчетную интенсивность движения транспорта, а также во время образования транспортных заторов. Задача изобретения - обеспечение независимого движения транспортных средств на разных уровнях во время образования транспортных заторов.Поставленная задача...
Путевой манипулятор “YURASUS”
Номер патента: 31276
Опубликовано: 15.06.2016
Автор: Сусанов Юрий Асланович
МПК: E01B 29/05
Метки: манипулятор, yurasus, путевой
Формула / Реферат:
Путевой манипулятор «YURASUS» предназначен для обновления изношенных железнодорожных рельсов. Путевой манипулятор состоит из длинномерной рамной конструкции на колесных парах, перемещаемый локомотивом по железнодорожным путям, имеет пару тоннельных направляющих, через которые проталкиваются рельсы, при движении конструкции, с перемещением левого рельса направо, а правого рельса налево, в результате чего контактная поверхность рельсов с ребордой...
Предыдущий патент: Способ производства бесшовных труб
Следующий патент: Емкость с адгезивной этикеткой с областью, свободной от адгезива
Случайный патент: Кровельный щит для наклонных крыш