Многозвенное сферическое соединение (варианты)
Формула / Реферат
Изобретение относится к области машиностроения, приборостроения и может быть использовано в качестве опор и соединений нескольких тел, которые могут совершать независимые угловые перемещения относительно одной неподвижной точки.
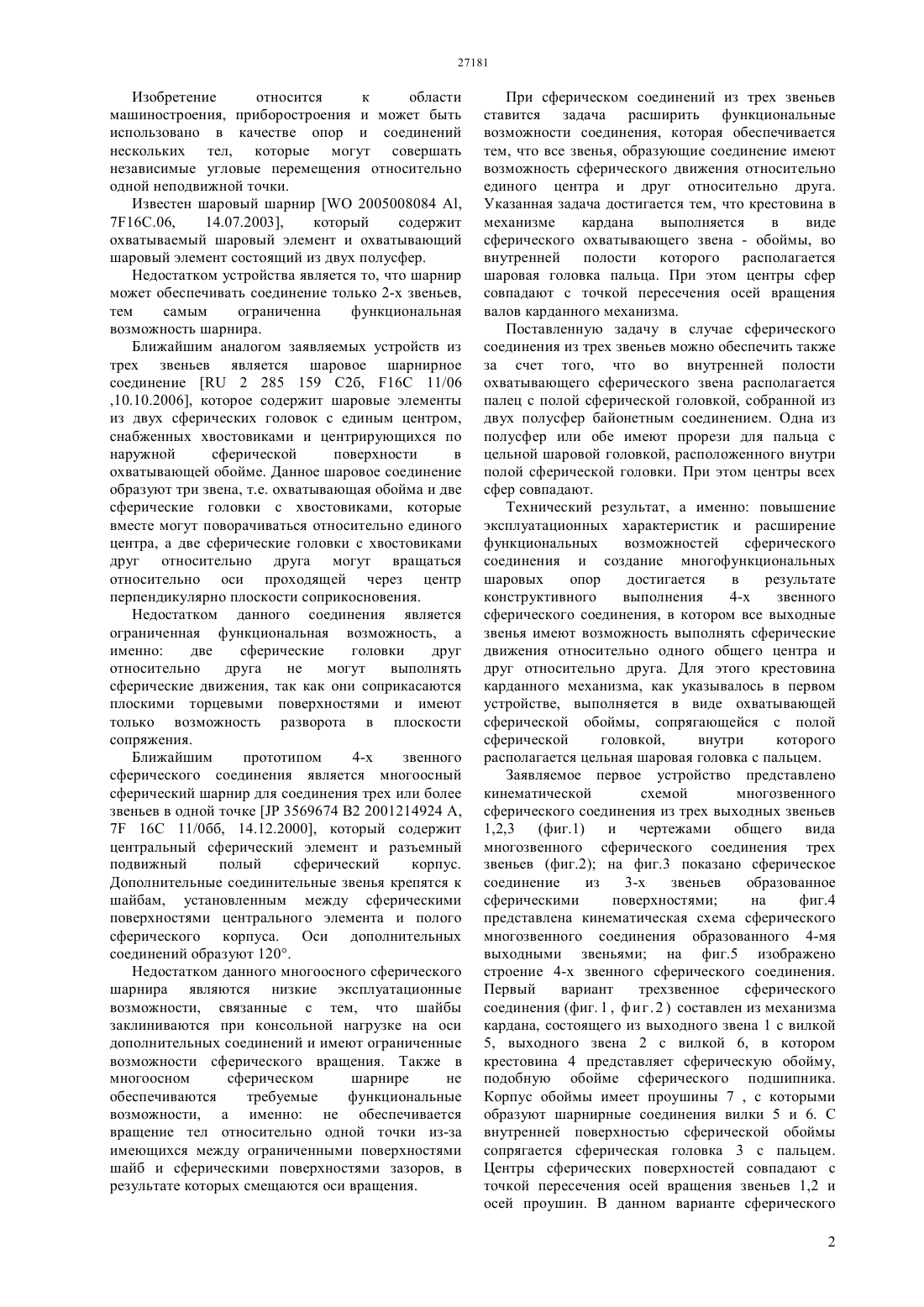
Первый вариант сферического соединения представляет соединение 3 выходных звеньев, объединяющих карданный механизм и шаровую пару, в котором крестовина в механизме кардана выполняется в виде сферического охватывающего звена - обоймы, во внутренней полости которого располагается шаровая головка пальца.
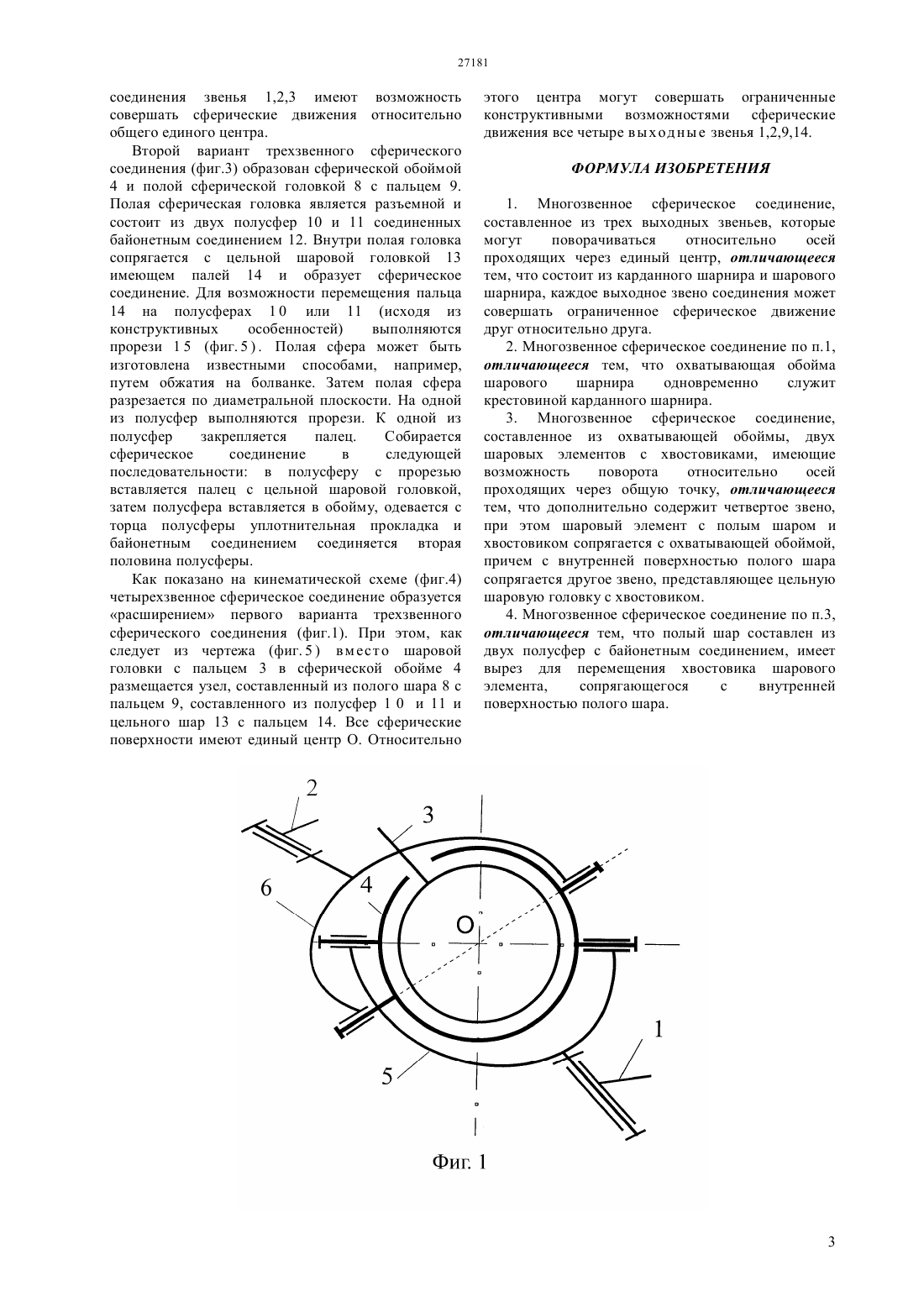
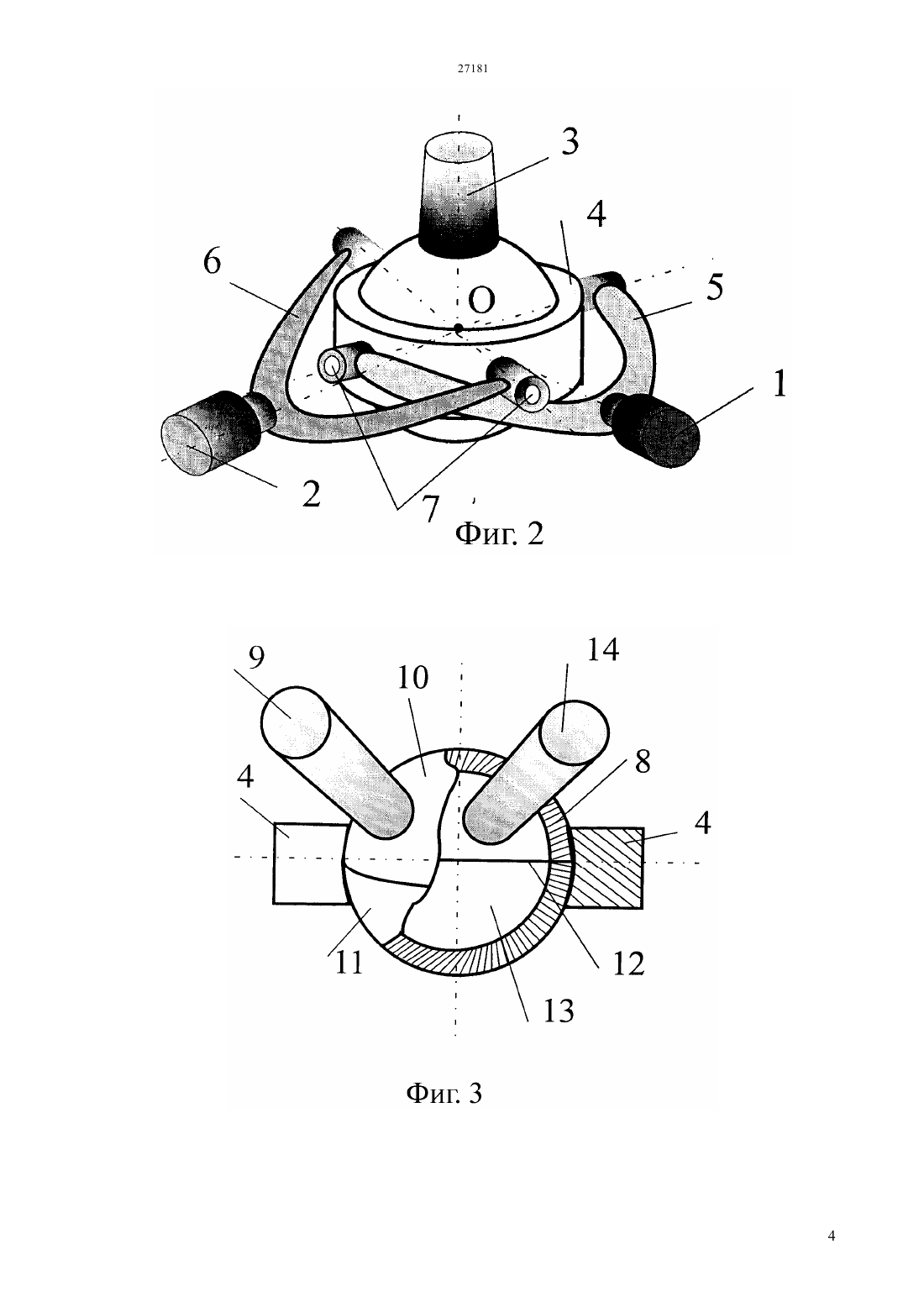
Второй вариант сферического соединения также представляет соединение 3 звеньев, состоящее из сферической обоймы и двух сферических головок, одна из которых имеет полую сферическую головку, во внутренней полости, которого располагается шаровый палец с цельной головкой.
Третий вариант сферического соединения составлен из 4 звеньев, в котором крестовина карданного механизма, выполняется в виде охватывающей сферической обоймы, сопрягающейся с полой сферической головкой, внутри которого располагается цельная шаровая головка с пальцем. Технический результат заключается в увеличении функциональных возможностей сферического соединения за счет того, что 3 или 4 звена могут совершать сферические движения независимо друг от друга относительно единого центра.
Текст
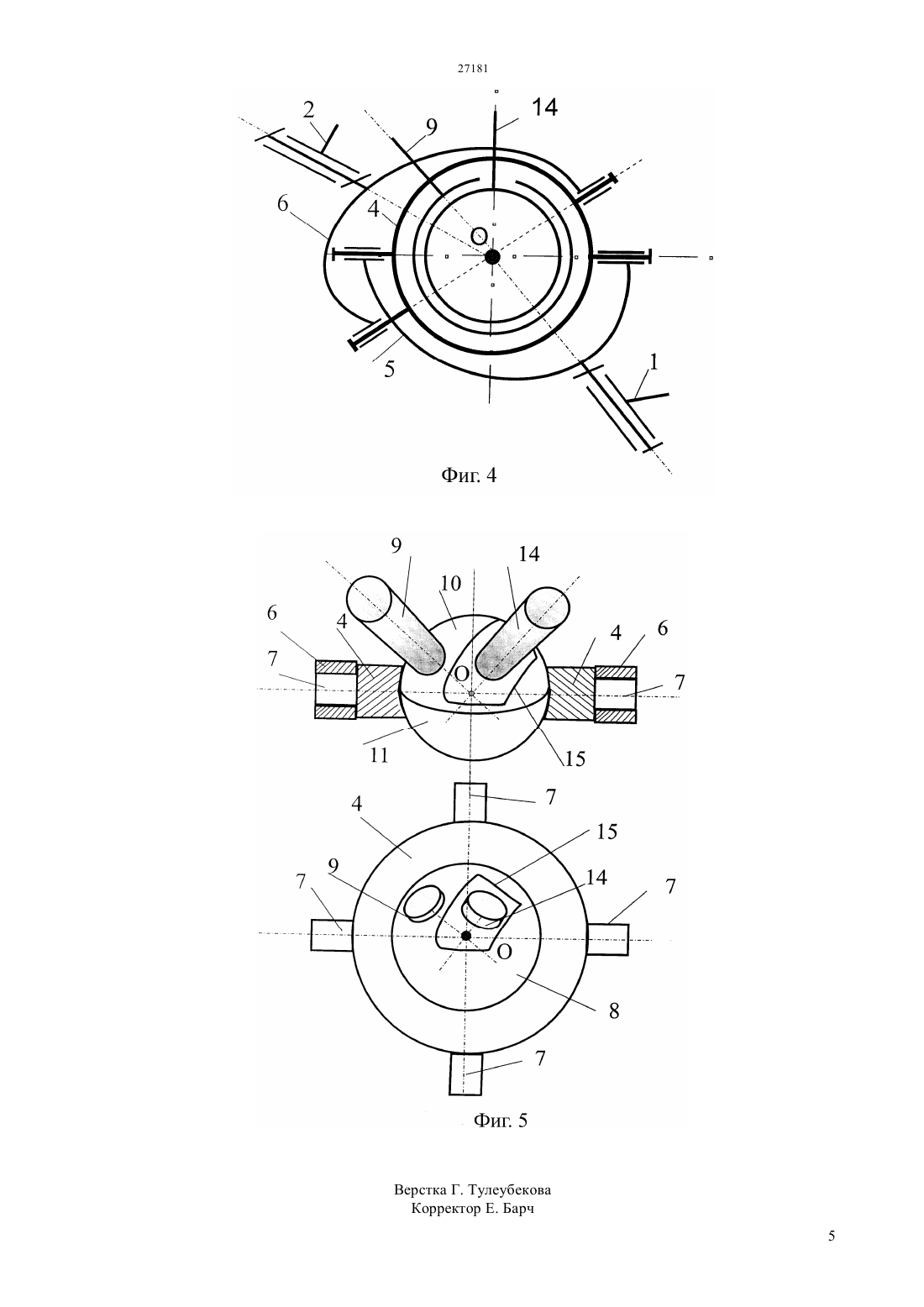
(51) 16 1/00 (2006.01) 16 11/00 (2006.01) 16 3/24 (2006.01) 25 17/00 (2006.01) 25 1/00(2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ выполняется в виде сферического охватывающего звена - обоймы, во внутренней полости которого располагается шаровая головка пальца. Второй вариант сферического соединения также представляет соединение 3 звеньев, состоящее из сферической обоймы и двух сферических головок,одна из которых имеет полую сферическую головку,во внутренней полости, которого располагается шаровый палец с цельной головкой. Третий вариант сферического соединения составлен из 4 звеньев, в котором крестовина карданного механизма, выполняется в виде охватывающей сферической обоймы,сопрягающейся с полой сферической головкой,внутри которого располагается цельная шаровая головка с пальцем. Технический результат заключается в увеличении функциональных возможностей сферического соединения за счет того, что 3 или 4 звена могут совершать сферические движения независимо друг от друга относительно единого центра.(73) Республиканское государственное предприятие на праве хозяйственного ведения Казахский национальный технический университет им. К.И. Сатпаева Министерства образования и науки Республики Казахстан(54) МНОГОЗВЕННОЕ СФЕРИЧЕСКОЕ СОЕДИНЕНИЕ (ВАРИАНТЫ)(57) Изобретение относится к области машиностроения, приборостроения и может быть использовано в качестве опор и соединений нескольких тел, которые могут совершать независимые угловые перемещения относительно одной неподвижной точки. Первый вариант сферического соединения представляет соединение 3 выходных звеньев,объединяющих карданный механизм и шаровую пару, в котором крестовина в механизме кардана Изобретение относится к области машиностроения, приборостроения и может быть использовано в качестве опор и соединений нескольких тел, которые могут совершать независимые угловые перемещения относительно одной неподвижной точки. Известен шаровый шарнир 2005008084 ,716.06,14.07.2003,который содержит охватываемый шаровый элемент и охватывающий шаровый элемент состоящий из двух полусфер. Недостатком устройства является то, что шарнир может обеспечивать соединение только 2-х звеньев,тем самым ограниченна функциональная возможность шарнира. Ближайшим аналогом заявляемых устройств из трех звеньев является шаровое шарнирное соединение 2 285 159 С 2 б, 16 11/06,10.10.2006, которое содержит шаровые элементы из двух сферических головок с единым центром,снабженных хвостовиками и центрирующихся по наружной сферической поверхности в охватывающей обойме. Данное шаровое соединение образуют три звена, т.е. охватывающая обойма и две сферические головки с хвостовиками, которые вместе могут поворачиваться относительно единого центра, а две сферические головки с хвостовиками друг относительно друга могут вращаться относительно оси проходящей через центр перпендикулярно плоскости соприкосновения. Недостатком данного соединения является ограниченная функциональная возможность, а именно две сферические головки друг относительно друга не могут выполнять сферические движения, так как они соприкасаются плоскими торцевыми поверхностями и имеют только возможность разворота в плоскости сопряжения. Ближайшим прототипом 4-х звенного сферического соединения является многоосный сферический шарнир для соединения трех или более звеньев в одной точке Р 3569674 В 2 2001214924 ,7 16 С 11/0 бб, 14.12.2000, который содержит центральный сферический элемент и разъемный подвижный полый сферический корпус. Дополнительные соединительные звенья крепятся к шайбам, установленным между сферическими поверхностями центрального элемента и полого сферического корпуса. Оси дополнительных соединений образуют 120. Недостатком данного многоосного сферического шарнира являются низкие эксплуатационные возможности, связанные с тем, что шайбы заклиниваются при консольной нагрузке на оси дополнительных соединений и имеют ограниченные возможности сферического вращения. Также в многоосном сферическом шарнире не обеспечиваются требуемые функциональные возможности, а именно не обеспечивается вращение тел относительно одной точки из-за имеющихся между ограниченными поверхностями шайб и сферическими поверхностями зазоров, в результате которых смещаются оси вращения. При сферическом соединений из трех звеньев ставится задача расширить функциональные возможности соединения, которая обеспечивается тем, что все звенья, образующие соединение имеют возможность сферического движения относительно единого центра и друг относительно друга. Указанная задача достигается тем, что крестовина в механизме кардана выполняется в виде сферического охватывающего звена - обоймы, во внутренней полости которого располагается шаровая головка пальца. При этом центры сфер совпадают с точкой пересечения осей вращения валов карданного механизма. Поставленную задачу в случае сферического соединения из трех звеньев можно обеспечить также за счет того, что во внутренней полости охватывающего сферического звена располагается палец с полой сферической головкой, собранной из двух полусфер байонетным соединением. Одна из полусфер или обе имеют прорези для пальца с цельной шаровой головкой, расположенного внутри полой сферической головки. При этом центры всех сфер совпадают. Технический результат, а именно повышение эксплуатационных характеристик и расширение функциональных возможностей сферического соединения и создание многофункциональных шаровых опор достигается в результате конструктивного выполнения 4-х звенного сферического соединения, в котором все выходные звенья имеют возможность выполнять сферические движения относительно одного общего центра и друг относительно друга. Для этого крестовина карданного механизма, как указывалось в первом устройстве, выполняется в виде охватывающей сферической обоймы, сопрягающейся с полой сферической головкой,внутри которого располагается цельная шаровая головка с пальцем. Заявляемое первое устройство представлено кинематической схемой многозвенного сферического соединения из трех выходных звеньев 1,2,3 (фиг.1) и чертежами общего вида многозвенного сферического соединения трех звеньев (фиг.2) на фиг.3 показано сферическое соединение из 3-х звеньев образованное сферическими поверхностями на фиг.4 представлена кинематическая схема сферического многозвенного соединения образованного 4-мя выходными звеньями на фиг.5 изображено строение 4-х звенного сферического соединения. Первый вариант трехзвенное сферического соединения (фиг. 1 , фиг. 2 ) составлен из механизма кардана, состоящего из выходного звена 1 с вилкой 5, выходного звена 2 с вилкой 6, в котором крестовина 4 представляет сферическую обойму,подобную обойме сферического подшипника. Корпус обоймы имеет проушины 7 , с которыми образуют шарнирные соединения вилки 5 и 6. С внутренней поверхностью сферической обоймы сопрягается сферическая головка 3 с пальцем. Центры сферических поверхностей совпадают с точкой пересечения осей вращения звеньев 1,2 и осей проушин. В данном варианте сферического 2 соединения звенья 1,2,3 имеют возможность совершать сферические движения относительно общего единого центра. Второй вариант трехзвенного сферического соединения (фиг.3) образован сферической обоймой 4 и полой сферической головкой 8 с пальцем 9. Полая сферическая головка является разъемной и состоит из двух полусфер 10 и 11 соединенных байонетным соединением 12. Внутри полая головка сопрягается с цельной шаровой головкой 13 имеющем палей 14 и образует сферическое соединение. Для возможности перемещения пальца 14 на полусферах 1 0 или 11 (исходя из конструктивных особенностей) выполняются прорези 1 5 (фиг. 5 ) . Полая сфера может быть изготовлена известными способами, например,путем обжатия на болванке. Затем полая сфера разрезается по диаметральной плоскости. На одной из полусфер выполняются прорези. К одной из полусфер закрепляется палец. Собирается сферическое соединение в следующей последовательности в полусферу с прорезью вставляется палец с цельной шаровой головкой,затем полусфера вставляется в обойму, одевается с торца полусферы уплотнительная прокладка и байонетным соединением соединяется вторая половина полусферы. Как показано на кинематической схеме (фиг.4) четырехзвенное сферическое соединение образуется расширением первого варианта трехзвенного сферического соединения (фиг.1). При этом, как следует из чертежа (фиг. 5 ) вм ест о шаровой головки с пальцем 3 в сферической обойме 4 размещается узел, составленный из полого шара 8 с пальцем 9, составленного из полусфер 1 0 и 11 и цельного шар 13 с пальцем 14. Все сферические поверхности имеют единый центр О. Относительно этого центра могут совершать ограниченные конструктивными возможностями сферические движения все четыре выход ны е звенья 1,2,9,14. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Многозвенное сферическое соединение,составленное из трех выходных звеньев, которые могут поворачиваться относительно осей проходящих через единый центр, отличающееся тем, что состоит из карданного шарнира и шарового шарнира, каждое выходное звено соединения может совершать ограниченное сферическое движение друг относительно друга. 2. Многозвенное сферическое соединение по п.1,отличающееся тем, что охватывающая обойма шарового шарнира одновременно служит крестовиной карданного шарнира. 3. Многозвенное сферическое соединение,составленное из охватывающей обоймы, двух шаровых элементов с хвостовиками, имеющие возможность поворота относительно осей проходящих через общую точку, отличающееся тем, что дополнительно содержит четвертое звено,при этом шаровый элемент с полым шаром и хвостовиком сопрягается с охватывающей обоймой,причем с внутренней поверхностью полого шара сопрягается другое звено, представляющее цельную шаровую головку с хвостовиком. 4. Многозвенное сферическое соединение по п.3,отличающееся тем, что полый шар составлен из двух полусфер с байонетным соединением, имеет вырез для перемещения хвостовика шарового элемента,сопрягающегося с внутренней поверхностью полого шара.
МПК / Метки
МПК: B25J 17/00, B25J 1/00, F16C 1/00, F16C 11/00, F16D 3/24
Метки: сферическое, соединение, многозвенное, варианты
Код ссылки
<a href="https://kz.patents.su/5-ip27181-mnogozvennoe-sfericheskoe-soedinenie-varianty.html" rel="bookmark" title="База патентов Казахстана">Многозвенное сферическое соединение (варианты)</a>
Рельсовое стыковое соединение
Номер патента: 945
Опубликовано: 15.06.1994
Автор: Касылкасов Женыс Мадыкенович
МПК: E01B 11/24
Метки: рельсовое, соединение, стыковое
Формула / Реферат:
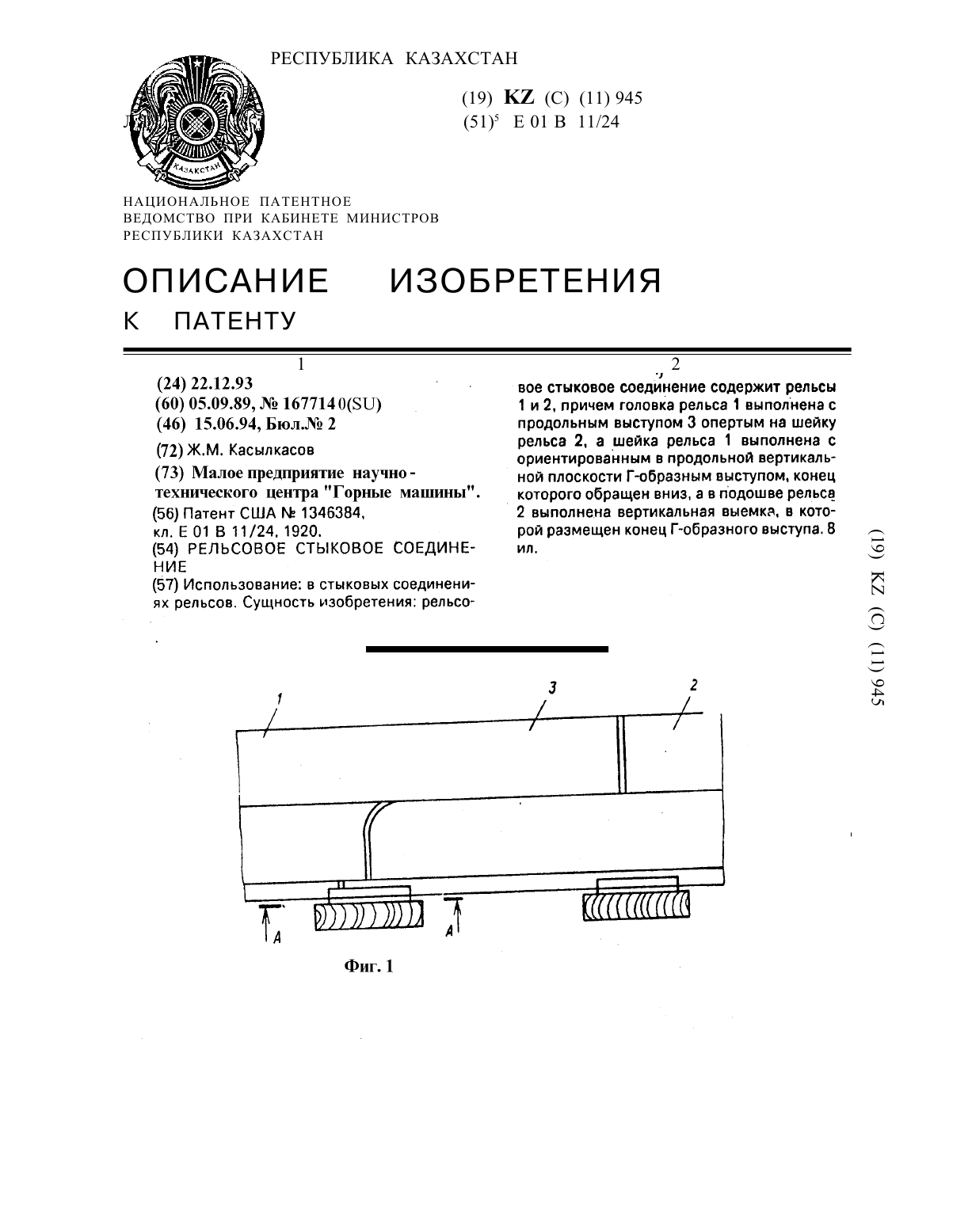
Использование: в стыковых соединениях рельсов. Сущность изобретения; рельсовое стыковое соединение содержит рельсы 1 и 2, причем головка рельса 1 выполнена с продольным выступом 3 опертым иа шейку рельса 2, а шейка рельса 1 выполнена с ориентированным в продольной вертикальной плоскости Г-образным выступом, конец которого обращен вниз, а в подошве рельса 2 выполнена вертикальная выемка, в которой размещен конец Г-образного выступа.
Гетероциклическое соединение бензолсульфонамида, способ его получения (варианты), терапевтическая композиция и лекарственное средство, содержащее указанное соединение
Номер предварительного патента: 12939
Опубликовано: 15.04.2003
Авторы: БОНДУ Мишель, ДОДЕЙ Пьер, БАРТ Мартин
МПК: C07D 401/14, A61K 31/47, C07D 401/12...
Метки: бензолсульфонамида, получения, указанное, гетероциклическое, лекарственное, содержащее, соединение, средство, варианты, способ, терапевтическая, композиция
Формула / Реферат:
Изобретение относится к соединениям,выбранным из группы, состоящей из (i) соединенийформулы (I), где Гет1 представляет собойазотсодержащий гетероцикл с 5 вершинами - вчастности, имидазол, пиразол или триазол; Гет2представляет собой азотсодержащий гетероцикл с4, 5 или 6 вершинами, выбранный из гетероцикловформул (II), где R1 и R2 определены, какуказано в описании; и (ii) их солей, получаемыхдобавлением кислоты. Изобретение относитсятакже к...
Рельсовое стыковое соединение (варианты)
Номер предварительного патента: 8013
Опубликовано: 15.09.1999
Автор: Хасанов Николай Сабитович
МПК: E01B 11/12
Метки: стыковое, варианты, соединение, рельсовое
Формула / Реферат:
Изобретение относится к рельсовым путям, в частности, к рельсовым стыковым соединениям.Повышение надежности, снижение износа железнодорожного пути и колес транспортного средства, устранение динамических ударов и повышение бесшумности железной дороги достигается тем, что в первом варианте рельсового стыкового соединения, содержащего стыковые накладки для охвата соединяемых рельсов с обеих сторон, в верхних и нижних концах накладок выполнены...
Интегральное стыковое соединение для соединения двух труб
Номер патента: 8089
Опубликовано: 15.10.1999
Автор: Серджио ЧЕРРУТИ
МПК: F16L 15/04
Метки: двух, соединения, труб, стыковое, соединение, интегральное
Формула / Реферат:
Интегральное соединение для соединения двух труб, у которого от кольцевой кромки внешней трубы идет внутренний раструб уменьшающегося поперечного сечения, взаимодействующий с натягом с соответствующим внешним обратным раструбом, выполненным на концевой части внутренней трубы возле нависающего заднего буртика последней, чтобы образовать другое непроницаемое полностью металлическое уплотнение с натягом дополнительно к другому непроницаемому...
Днк (варианты), полипептид (варианты), слитый полипептид, рекомбинантная днк, конструкт рекомбинантной днк, клетка, способ отбора соединений и соединение, композиция для применения в сельском хозяйстве, композиция для применения в фармации, способ получения белка, пептида или полипептида
Номер патента: 8415
Опубликовано: 15.05.2002
Авторы: ГРИНЛЕНД, Эндрю, Джеймс, МАРТИНЕЗ, Альберто, ДЖЕПСОН, Ян
МПК: C07K 14/72, A61K 38/16, C07K 14/435...
Метки: способ, полипептид, хозяйстве, полипептида, фармации, клетка, конструкт, получения, рекомбинантная, соединений, соединение, варианты, композиция, днк, рекомбинантной, пептида, отбора, сельском, слитый, белка, применения
Формула / Реферат:
Изобретение относится к стероидному рецепторному белку насекомого, который способен действовать в качестве гена-переключателя, чувствительного к химическому индуктору, запускающему внешний контроль данного гена.
Предыдущий патент: Уплотнение штока поршня двигателя внутреннего сгорания
Следующий патент: Складывающийся защитный кожух Копылова
Случайный патент: Способ декольматации фильтров и призабойной зоны скважин (варианты)