Дистанционно управляемый мобильный многофункциональный манипулятор
Номер полезной модели: 1402
Опубликовано: 15.03.2016
Авторы: Хачикян Владислав Саркисович, Байжанов Бектур Сембиулы, Мендакулов Жасулан Корабаевич, Кальменов Тынысбек Шарипович, Ахметова Гулжан Жумабеккызы, Антонцев Александр Витальевич
Формула / Реферат
Дистанционно управляемый мобильный многофункциональный манипулятор
Полезная модель относится к робототехнике, в частности к манипуляторам для подъема и транспортировки грузов и может быть использована в работах, предназначенных для ликвидации чрезвычайных ситуаций, например, для обнаружения, перемещения и уничтожения взрывоопасных устройств.
Технический результат заключается в создании дистанционно управляемого мобильного многофункционального манипулятора, управляемого по кабельной линии (до 100 м) или по радиоканалам, способного к захвату, удержанию на платформе и перемещению грузов, в том числе с повышенной опасностью, а также расширение функциональных возможностей устройства, обеспечивающее одновременное представление оператору визуальной информации о положении взрывоопасного устройства и текущем положении управляемого манипулятора.
Предложен дистанционно управляемый мобильный многофункциональный манипулятор, включающий дистанционно управляемый мобильный многофункциональный манипулятор, размещенный на подвижном аппарате, содержащий поворотное основание с возможностью поворота вокруг оси, оснащенный активным радиальным двупалым охватом, соединенным с пультом оператора посредством информационной кабельной линии связи, в которую введен силовой кабель, дополнительно оснащенный модулем приемопередатчика, а также модулями видеокамеры, инфракрасного и ультразвукового измерителей расстояний, при этом подвижный аппарат может быть выполнен, как на гусеничном, так и на колесном ходу. Все узлы предлагаемого манипулятора изготовлены по модульному принципу.
Текст
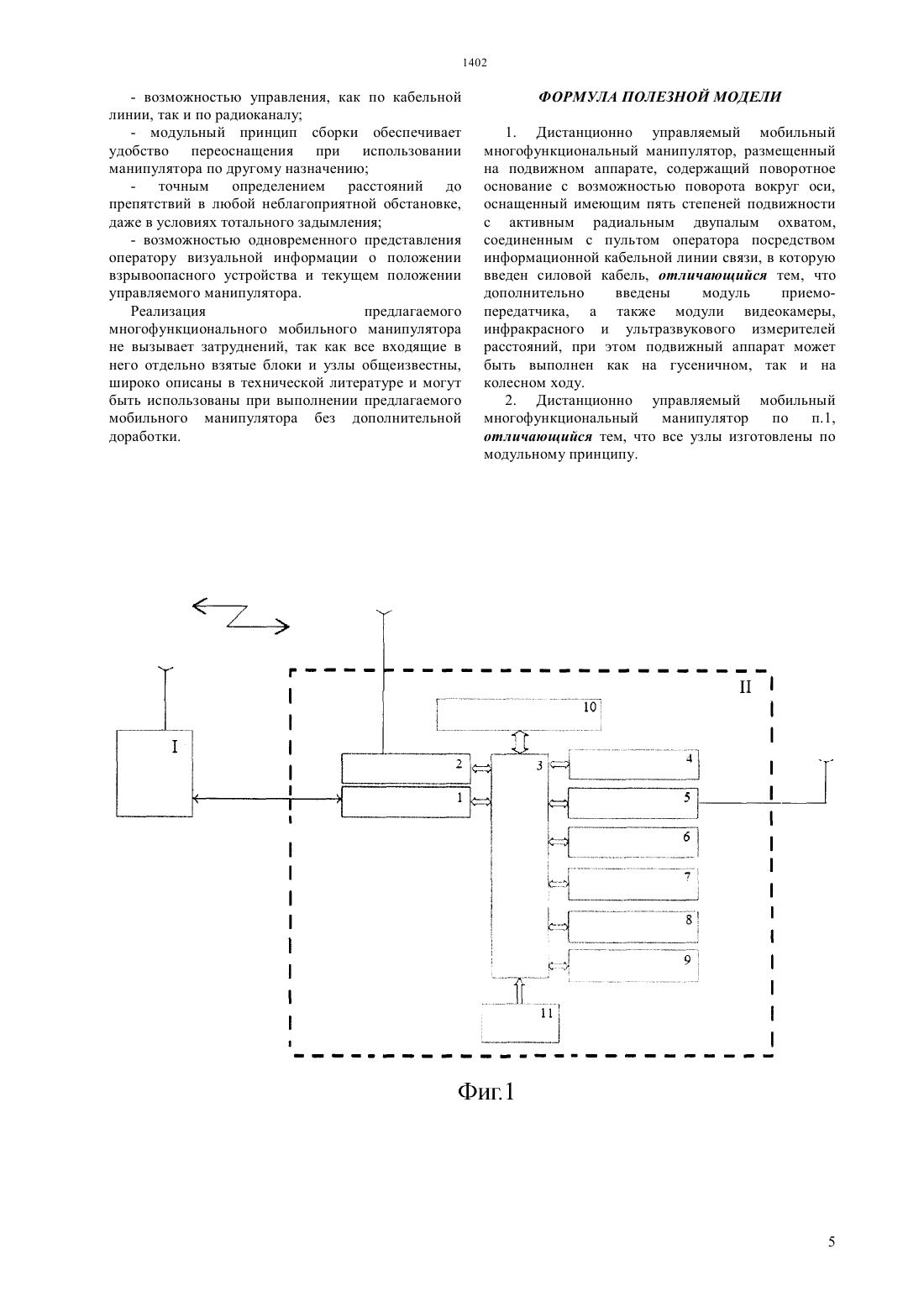
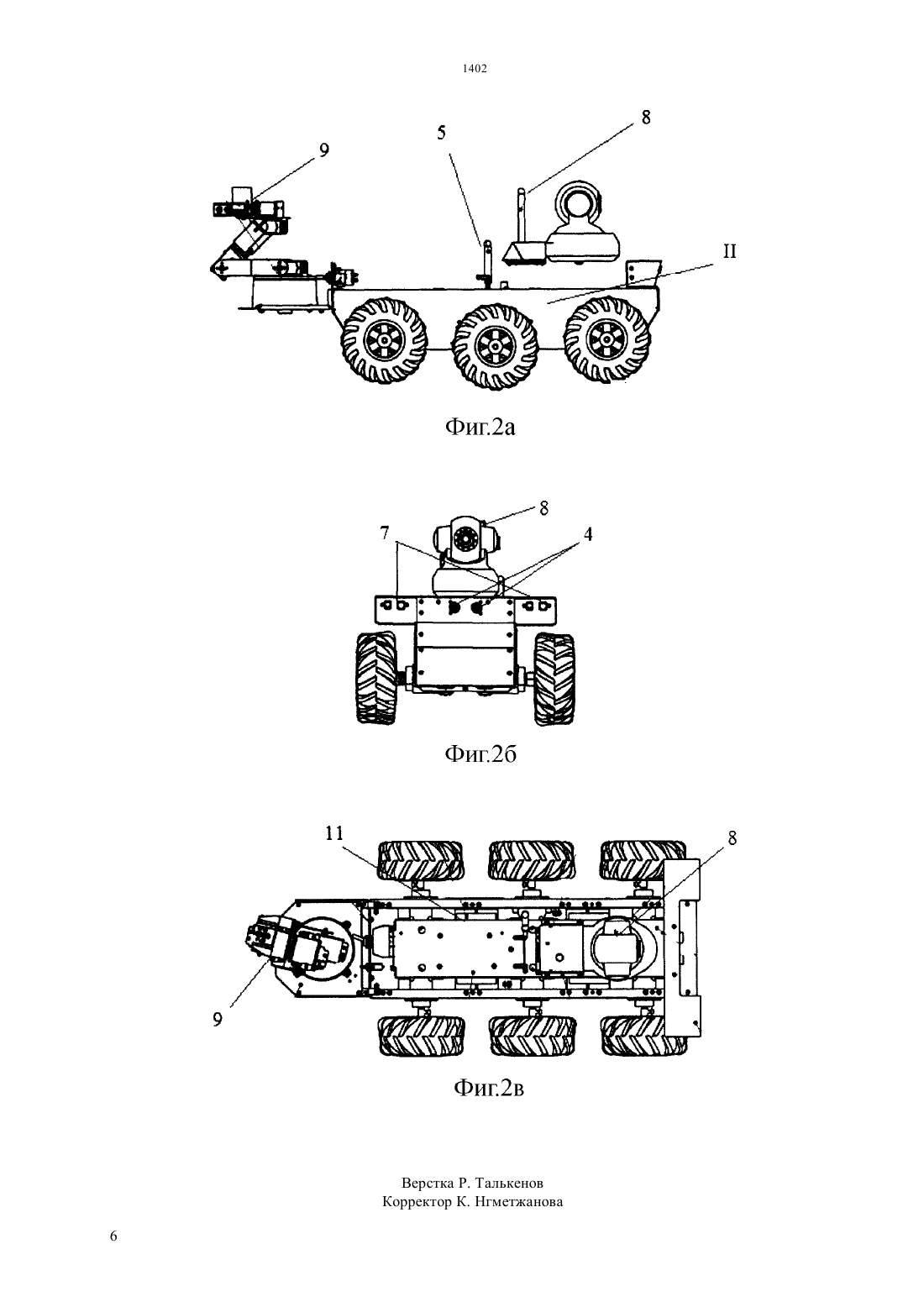
МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ управляемого по кабельной линии (до 100 м) или по радиоканалам, способного к захвату, удержанию на платформе и перемещению грузов, в том числе с повышенной опасностью, а также расширение функциональных возможностей устройства,обеспечивающее одновременное представление оператору визуальной информации о положении взрывоопасного устройства и текущем положении управляемого манипулятора. Предложен дистанционно управляемый мобильный многофункциональный манипулятор,включающий дистанционно управляемый мобильный многофункциональный манипулятор,размещенный на подвижном аппарате, содержащий поворотное основание с возможностью поворота вокруг оси, оснащенный активным радиальным двупалым охватом, соединенным с пультом оператора посредством информационной кабельной линии связи, в которую введен силовой кабель,дополнительно оснащенный модулем приемопередатчика, а также модулями видеокамеры,инфракрасного и ультразвукового измерителей расстояний, при этом подвижный аппарат может быть выполнен, как на гусеничном, так и на колесном ходу. Все узлы предлагаемого манипулятора изготовлены по модульному принципу.(72) Хачикян Владислав Саркисович Антонцев Александр Витальевич Ахметова Гулжан Жумабеккызы Мендакулов Жасулан Корабаевич Байжанов Бектур Сембиулы Кальменов Тынысбек Шарипович(73) Республиканское государственное предприятие на праве хозяйственного ведения Институт математики и математического моделирования Комитета науки Министерства образования и науки Республики Казахстан(54) ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ МАНИПУЛЯТОР(57) Полезная модель относится к робототехнике, в частности к манипуляторам для подъема и транспортировки грузов и может быть использована в работах, предназначенных для ликвидации чрезвычайных ситуаций,например,для обнаружения,перемещения и уничтожения взрывоопасных устройств. Технический результат заключается в создании дистанционно управляемого мобильного многофункционального манипулятора, 1402 Полезная модель относится к робототехнике, в частности к манипуляторам для подъема и транспортировки грузов и может быть использована в работах, предназначенных для ликвидации чрезвычайных ситуаций,например,для обнаружения,перемещения и уничтожения взрывоопасных устройств. Из уровня техники известен самоходный многофункциональный манипулятор (Патентна полезную модель, 144273, кл. 25 5/00, 2014),включающий передвижное основание, неподвижно укрепленную на основании вертикально ориентированной стойку и гидроцилиндр, корпус которого прикреплен к основанию, а шток шарнирно соединен с элементами сменных средств для выполнения рабочих операций, при этом стойка и основание снабжены приспособлениями для быстросъемного крепления к ним элементов сменных средств для выполнения рабочих операций. Недостаток известного самоходного многофункционального манипулятора заключается в том, что он не имеет инфракрасного и ультразвукового измерителя расстояния,приемника, акселерометра с магнитным компасом,беспроводного радиоканала, автономной системы управления. Известен также робот-манипулятор (Патентна полезную модель 135957, кл. 25 11/00, А 61 В 17/062 2013), содержащий руку манипулятора с приспособлением для установки инструментов,стойку для перемещения руки манипулятора и ее фиксации,пост управления и систему видеонаблюдения, при этом рука манипулятора установлена с возможностью обеспечения вращения и поступательного перемещения инструмента относительно его продольной оси и качания в двух взаимно перпендикулярных плоскостях вокруг фокуса, расположенного на рабочем конце инструмента, посредством выполнения ее в виде последовательно соединенных с помощью вращательных кинематических пар подвижных звеньев, представляющих собой подсоединенное через неподвижное звено к стойке поворотное звено,звено качания плеча, звено плеча, звено предплечья,запястье, звено качания инструмента и звено ротации инструмента, при этом подвижные звенья руки манипулятора имеют приводы со встроенными волновыми редукторами, в качестве приводов плеча и предплечья руки манипулятора выбран привод-14-100-200- с редуктором, имеющим передаточное отношение 100, в качестве привода запястья руки манипулятора выбран привод 8-100-200- с передаточным отношением редуктора 100. Система видеонаблюдения предназначена для визуализации и видеофиксации этапов операции и расположена на отдельной подвижной стойке, что позволяет добиться наиболее удобного расположения видеокамер по отношению к манипулятору. Однако данный робот-манипулятор не способен перемещаться на дальние расстояния. Он не способен перемещать грузы на дальние расстояния,у него отсутствуют датчики расстояния, отсутствует 2 управление через пульт оператора посредством радиоканала или кабельного канала, он не снабжен аккумуляторным питанием.) Известный манипулятор (Патент , полезную модель 98966, кл. 25 18/00, 25 9/00, 2010) содержит две антропоморфные руки и платформу с закрепленным на ней поворотным корпусом, причем каждая рука включает модуль плеча, модуль предплечья и схват,которые выполнены соответственно с приводом модуля плеча и с приводами ротации и качания локтя и схвата,встроенными в модуль предплечья и размещенными в этом модуле соответственно со стороны локтя и схвата, при этом модули плеча и предплечья расположены параллельно опорной поверхности платформы, кроме того, он снабжен модулем раздвоения и двумя полыми, удлиненными защитными кожухами соответственно для каждой руки, причем полость каждого кожуха образована днищем и боковыми стенками, симметрично скрепленными с днищем и выступающими относительно днища с образованием проушин, а модуль каждого предплечья закреплен с локтевой стороны на оси между проушинами соответствующего кожуха с возможностью поворота и размещения этого модуля в полости соответствующего кожуха, при этом кожухи с размещенными в них модулями предплечья обращены друг к другу рабочими поверхностями боковых стенок с образованием губок гиперсхвата для удержания и перемещения крупногабаритных предметов или при выходе модулей предплечий из полостей кожухов с образованием схвата для работы с малогабаритными предметами, причем модуль раздвоения содержит ведущее и два ведомых звена,а его ведущее звено консольно скреплено с поворотным корпусом, расположено параллельно опорной поверхности платформы и выполнено с двумя встроенными приводами, на выходных валах которых закреплены и параллельно ориентированы относительно опорной поверхности платформы соответствующие ведомые звенья модуля раздвоения для поворотов и передачи усилий, при этом модули плеча скреплены с соответствующим ведомым звеном модуля раздвоения, размещены с охватом кожухов с двух нерабочих сторон их боковых стенок и соосно скреплены с кожухами шарнирами с возможностью создания приводами модулей плеч разнонаправленных усилий зажима крупногабаритных предметов, причем оси шарниров расположены параллельно опорной поверхности платформы. Поворотный корпус выполнен с двумя дополнительными степенями подвижности, оси которых параллельны опорной поверхности платформы и расположены от нее на разных уровнях по высоте, рабочая поверхность боковой стенки одного кожуха выполнена с закрепленной на ней пластиной и с двумя парами встроенных в пластину и равномерно расположенных на ней один под другим тензодатчиков контроля усилий зажима гиперзахвата, которые соответственно подключены к входам приводов модулей плеча, а привод,встроенный в ведущее звено модуля раздвоения, 1402 образован электродвигателем, скрепленным муфтой с коническим редуктором, взаимодействующим с волновым редуктором, который служит выходным валом указанного привода. Этот манипулятор способен работать, как с малогабаритными, так и с крупногабаритными предметами. Однако данный манипулятор имеет две руки, что может быть излишним или мешающим для схвата и перемещения грузов. Данный манипулятор не имеет автономную систему управления,пульта дистанционного управления по радиоканалу,ультразвуковых и инфракрасных датчиков расстояния,приемника, акселерометра с магнитным компасом и видеокамеры. Отсутствует возможность перемещения на колесном ходу. Наиболее близким к заявляемой полезной модели по совокупности признаков является мобильный робототехнический комплекс (Патентполезную модель, 56996, кл. 42 5/04, 2003), который содержит пульт оператора, подвижный аппарат,соединенный с пультом оператора посредством информационной кабельной линии связи и оснащенный системой технического зрения и четырьмя гусеничными движителями,манипулятором,имеющим пять степеней подвижности с активным радиальным двупалым охватом в линию связи введен дополнительно силовой кабель,обеспечивающий питание переносного пульта оператора от источника автономного питания, размещенного на борту передвижного аппарата, в пульте оператора размещен дисплей, на который выводится визуальная информация о текущем положении подвижного аппарата (трехмерная кинематическая модель). Комплекс предназначен для дистанционного поиска и обезвреживания взрывных устройств путем перемещения указанных устройств в безопасное место для дальнейшего уничтожения, либо доставки средств уничтожения непосредственно к месту закладки взрывного устройства. К недостаткам ближайшего аналога относится то,что он не управляется посредством радиоканала, не имеет встроенный аккумулятор, ультразвуковых и инфракрасных датчиков расстояния, акселерометра с магнитным компасом. Задачей полезной модели является создание дистанционно управляемого мобильного многофункционального манипулятора,обладающего универсальностью, мобильностью и сравнительно невысокой стоимостью,предназначенного для подъема и транспортировки грузов, который может быть использован в работах,предназначенных, в том числе, и для ликвидации чрезвычайных ситуаций,например,для обнаружения,перемещения и уничтожения взрывоопасных устройств,с возможностью управления, как по кабелю, так и по радиоканалу, с автономным питанием. Технический результат заключается в создании дистанционно управляемого мобильного многофункционального манипулятора,управляемого по кабельной линии связи (до 100 м) или по радиоканалу способного к захвату,удержанию на платформе и перемещению грузов, в том числе с повышенной опасностью, а также расширение функциональных возможностей устройства,обеспечивающее одновременное представление оператору визуальной информации о положении взрывоопасного устройства и текущем положении управляемого манипулятора. Указанный технический результат достигается тем,что мобильный многофункциональный манипулятор, размещенный на подвижном аппарате,закрепленный на неподвижной опоре, жестко связанной с опорной рамой, и содержащий поворотное основание с возможностью поворота вокруг оси, оснащенный активным радиальным двупалым охватом, соединенным с пультом оператора посредством информационной кабельной линии связи, в которую введен силовой кабель,обеспечивающий питание переносного пульта оператора от источника автономного питания,размещенного на борту подвижного аппарата,согласно предлагаемой полезной модели дополнительно оснащен модулями приемопередатчика, видеокамеры, инфракрасного и ультразвукового измерителей расстояний. Указанный результат достигается также тем, что подвижный аппарат может быть выполнен как на гусеничном, так и на колесном ходу. Заявленный технический результат достигается также тем, что для управления используется, как управление по кабельной линии связи на расстоянии до 100 м, так и радиоканал. Сущность полезной модели поясняется чертежами, где на фиг.1 приведена блок-схема дистанционно управляемого мобильного многофункционального манипулятора, на фиг.2 общий вид изделия. Самоходный многофункциональный мобильный манипулятор (фиг.1) содержит - пультдистанционного управления - ноутбук, который обеспечивает формирование оператором команд управления движением и передачу их по радио/проводным каналам связи на подвижный аппарат, отображение местоположения аппарата и видеоизображений местности, передаваемых с установленных на подвижном аппаратемодулей- модуль 1 интерфейса , обеспечивает взаимодействие пульта оператора и РТС по кабельной линии и передачу на пульт управления видеоизображений местности, где он находится, и координат своего местоположения и может быть выполнен на А 0000723- модуль 2 приемо-передатчика по радиоканалу,обеспечивает взаимодействие пульта оператора и РТС по радиоканалу и передачу на пульт управления видеоизображений местности, где он находится, и координат своего местоположения и может быть выполнен на 0030 АРС 802- модуль 3 контроллера, который обеспечивает выполнение программ решения задач, обработку команд поступающих с пульта оператора,формирование команд управления движением 3 подвижного аппарата, может быть выполнен на А 000063- модуль 4 ультразвукового измерителя расстояния, обеспечивает обнаружение препятствий,возникающих на пути движения подвижного аппарата, и может быть выполнен на 0001 37- модуль 5 примника, определяет текущие координаты местоположения подвижного аппарата,может быть выполнен на 0044- модуль 6 компаса, обеспечивает определение ускорений, наклонов, углов поворотов подвижного аппарата, может быть выполнен на -10703 303- модуль 7 ИК измерителя расстояний обнаруживает препятствия, возникающие на пути движения подвижного аппарата, и может быть выполнен на 2021- модуль 8 видеокамеры, обеспечивает видеонаблюдение окружающей местности, может быть использован -10061- рука-манипулятор 9 с пятью степенями подвижности. модуль 10 управления двигателями обеспечивает выполнение команд (вперед, назад,влево, вправо, стоп), формируемых в контроллере по управлению двигателями постоянного тока,приводящими в движение подвижный аппарат,может быть выполнен на А 0000793.- аккумуляторная батарея 11. Разработанный для самоходного многофункционального мобильного манипулятора программный комплекс обеспечивает управление маневрами и скоростью передвижения аппарата, а также обеспечивает управление рукойманипулятором и е составными частями вперед вниз, назад - вверх, влево, вправо, вперед и влево, вперед и вправо, назад и влево, назад и вправо стоп, что позволяет осуществлять управление манипулятором. Предлагаемая полезная модель работает следующим образом. Подключают пульт управленияи контроллер 3 к источникам питания. В контроллере 3 установлено программное обеспечение. Подключение контроллера 3 к сети питания осуществляется расположенным на задней панели подвижного аппарата слаботочным тумблером,а исполнительных механизмов - тумблером на большие токи. Команды с пульта управленияпередаются на модуль 3 контроллера по каналу 1 или посредством беспроводного канала через приемо-передатчик 2. При включении программного обеспечения на пульте оператораустанавливается связь между пультом оператора и мобильным многофункциональным манипулятором . При подаче сигнала от пульта операторапо каналу 1 начинает работу контроллер 3. По командам контроллера 3 начинают работать все модули. Модуль 4 ультразвукового измерителя расстояния посылая эхо-сигнал получает данные о 4 расстоянии до препятствия из отраженного сигнала,модуль 5 приемника получает данные о текущем местоположении мобильного многофункционального манипулятора, модуль 6 компаса измеряет углы наклона подвижного аппарата относительно горизонта, модуль 7 инфракрасного датчика обнаруживает препятствие по уровню ИК-излучения, модуль 8 видеокамеры передает изображение местности, находящейся перед мобильным многофункциональным манипулятором. Обработанные в модуле контроллера 3 данные поступают на пульт оператора . Оператор принимает решение о дальнейших действиях. Рука-манипулятор 9 по команде оператора совершает необходимые действия. Оператор через контроллер 3 подает команды на модуль 10 управления двигателями для передвижения на местности. Автономное питание многофункционального мобильного манипулятораосуществляется от аккумуляторной батареи 11. Рука-манипулятор 9 закреплена на подвижном круглом основании, установленном на подвижной платформе . Основание руки-манипулятора вращается по горизонтали под углом 210-240. Рукаманипулятор выполнена из двух звеньев,последовательно соединенных между собой с помощью драйверов,и двупалого схвата. Движением каждого звена управляет отдельный драйвер, а движением схвата управляют два драйвера. Работой драйверов руководит контроллер 3. Первое звено руки-манипулятора вертикально ориентировано и может двигаться в вертикальной плоскости под углом 190-210. Второе звено рукиманипулятора также может двигаться в вертикальной плоскости под углом 90-110. Первый драйвер двупалого схвата осуществляет движение схвата по вертикали под углом 90-110, а второй управляет движением механических пальцев по горизонтали. После установки на пульте операторакоманды на управление руки-манипулятора и скорости е передвижения эти данные поступают на контроллер 3, в котором формируются управляющие сигналы для работы каждого драйвера. Сигналы с контроллера 3 управляют движением каждого звена и схвата для выполнения необходимых действий. Технико-экономический эффект предложенного манипулятора состоит в расширении его функций и в обеспечении работ с малогабаритными и с крупногабаритными предметами, с одновременным повышением надежности удержания и перемещения крупногабаритных предметов, с сохранением их ориентации в пространстве и с обеспечением заданного усилия зажима в любой точке рабочей поверхности пальцев схвата, в увеличении грузоподъемности манипулятора, и в увеличении рабочей зоны для малогабаритных предметов. Сравнительный анализ показал, что заявленная полезная модель отличается от известных устройств рядом преимуществ- мобильность, обеспечивается как гусеничным и колесным исполнением- возможностью управления, как по кабельной линии, так и по радиоканалу- модульный принцип сборки обеспечивает удобство переоснащения при использовании манипулятора по другому назначению- точным определением расстояний до препятствий в любой неблагоприятной обстановке,даже в условиях тотального задымления- возможностью одновременного представления оператору визуальной информации о положении взрывоопасного устройства и текущем положении управляемого манипулятора. Реализация предлагаемого многофункционального мобильного манипулятора не вызывает затруднений, так как все входящие в него отдельно взятые блоки и узлы общеизвестны,широко описаны в технической литературе и могут быть использованы при выполнении предлагаемого мобильного манипулятора без дополнительной доработки. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Дистанционно управляемый мобильный многофункциональный манипулятор, размещенный на подвижном аппарате, содержащий поворотное основание с возможностью поворота вокруг оси,оснащенный имеющим пять степеней подвижности с активным радиальным двупалым охватом,соединенным с пультом оператора посредством информационной кабельной линии связи, в которую введен силовой кабель, отличающийся тем, что дополнительно введены модуль приемопередатчика, а также модули видеокамеры,инфракрасного и ультразвукового измерителей расстояний, при этом подвижный аппарат может быть выполнен как на гусеничном, так и на колесном ходу. 2. Дистанционно управляемый мобильный многофункциональный манипулятор по п.1,отличающийся тем, что все узлы изготовлены по модульному принципу.
МПК / Метки
МПК: B25J 5/00
Метки: мобильный, управляемый, дистанционно, манипулятор, многофункциональный
Код ссылки
<a href="https://kz.patents.su/6-u1402-distancionno-upravlyaemyjj-mobilnyjj-mnogofunkcionalnyjj-manipulyator.html" rel="bookmark" title="База патентов Казахстана">Дистанционно управляемый мобильный многофункциональный манипулятор</a>
Автоматизированный дистанционно управляемый комплекс огневого поражения
Номер полезной модели: 1236
Опубликовано: 16.03.2015
Авторы: ВИЛЬЧИКОВ Александр Иванович, ВОЙТЕНКОВ Александр Сергеевич, КОЗЛОВ Валерий Степанович
МПК: F41H 13/00
Метки: управляемый, огневого, поражения, дистанционно, автоматизированный, комплекс
Формула / Реферат:
Полезная модель относится к области обнаружения и огневого поражения различных целей при боевых действиях. Технический результат -расширение области применения, например, при его установке на подвижных объектах, улучшение тактико-технических и боевых характеристик за счет увеличения скорости прицеливания и повышения эффективности поражения целей. Комплекс содержит оружейную часть с единицей дистанционно управляемого оружия, дистанционно...
Манипулятор SHOLKORS платформенного робота
Номер полезной модели: 1115
Опубликовано: 16.06.2014
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: sholkors, робота, платформенного, манипулятор
Формула / Реферат:
Полезная модель может применяться в машиностроении, приборостроении, в транспортном машиностроении. Преимущественная область применения там, где требуется управление точной ориентацией и перемещением объектов в пространстве при больших несущих массах, а также - в качестве опор.В конструкцию манипулятора, в котором одна платформа относительно другой имеет шесть управляемых степеней свободы, введены новые конструктивные элементы в виде трехзвенных...
Манипулятор
Номер патента: 460
Опубликовано: 15.03.1994
Автор: Шоланов Корганбай Сагнаевич
МПК: B25J 11/00
Метки: манипулятор
Формула / Реферат:
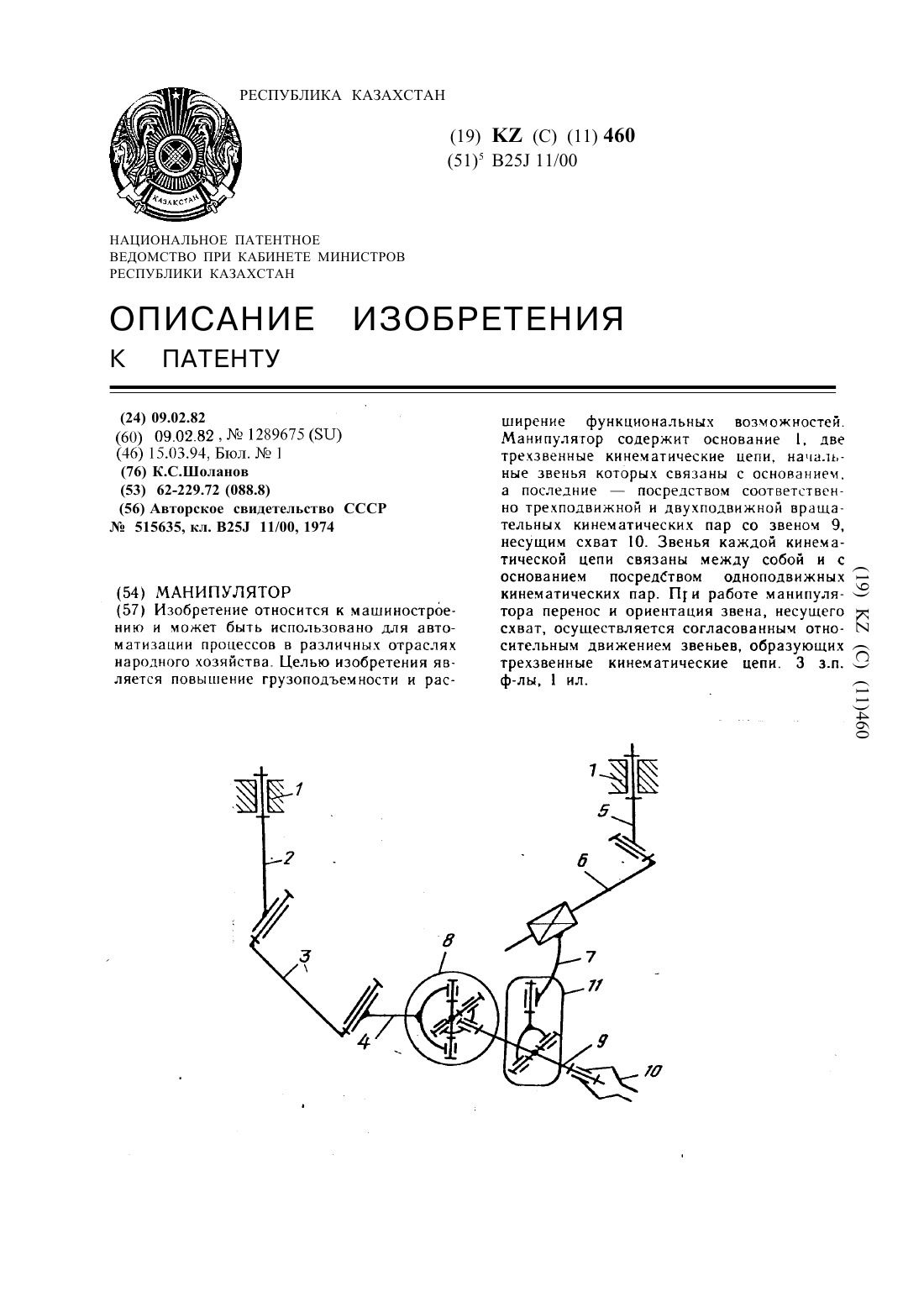
Изобретение относится к машиностроению и может быть использовано для автоматизации процессов в различных отраслях народного хозяйства. Целью изобретения является повышение грузоподъемности и расширение функциональных возможностей. Манипулятор содержит основание 1, две трехзвенные кинематические цепи, начальные звенья которых связаны с основанием, а последние - посредством соответственно трехподвижной и двухподвижной вращательных кинематических...
Манипулятор
Номер предварительного патента: 18892
Опубликовано: 15.11.2007
Авторы: Бекетов Галымжан Шакирович, Журсенбаев Балахазы Ибрайович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспорт-ному машиностроению. Манипулятор может использоваться с различными видами рабочего навесного оборудования в различных отраслях хозяйства, может быть применен в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков штабеллеров для валки, пакетирования и погрузки деревьев, с копающим и погрузочным ковшом экскватора - для погрузки сыпучих и навалочных грузов на железнодорожные платформы,...
Манипулятор
Номер патента: 459
Опубликовано: 15.03.1994
Авторы: Джолдасбеков Умирбек Арисланович, Акимкулова Куралай Еркембаевна, Журсенбаев Балагазы Ибраевич, Байгунчеков Жумадил Жанабаевич, Рахматуллаев Абдижалел Шайманович
МПК: B25J 5/00
Метки: манипулятор
Формула / Реферат:
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в составе рабочего оборудования валочно-пакетирующих машин или погрузчиков-штабелеров, а также с различными видами другого рабочего навесного оборудования и позволяет расширить зону обслуживания. Цель изобретения - расширение зоны обслуживания. Манипулятор, установленный на подвижном шасси, содержит поворотную раму, стойку, закрепленную на ней стрелу, на...
Предыдущий патент: Устройство для вибрационной очистки изделий
Следующий патент: Дисковый нож для резки тросов
Случайный патент: Игра "Народная лотерея"