Система и способ для определения качества оценки положения приводной системы
Номер патента: 24759
Опубликовано: 17.10.2011
Формула / Реферат
Предусмотрена система (10) для определения качества (12) оценки (14) положения приводной системы в положении (18). Система включает в себя первый датчик (22), выполненный с возможностью измерять первый параметр приводной системы в положении. Система дополнительно включает в себя второй датчик (24), выполненный с возможностью измерять второй параметр приводной системы в положении. Система дополнительно включает в себя второй контроллер (28), выполненный с возможностью определять оценку положения приводной системы и качество (12) оценки положения, на основании первого положения (30) приводной системы на основании первого параметра и второго положения (32) приводной системы на основании второго параметра приводной системы. Также предусмотрен способ (100) для определения качества (12) оценки (14) положения приводной системы в положении (18).
Текст
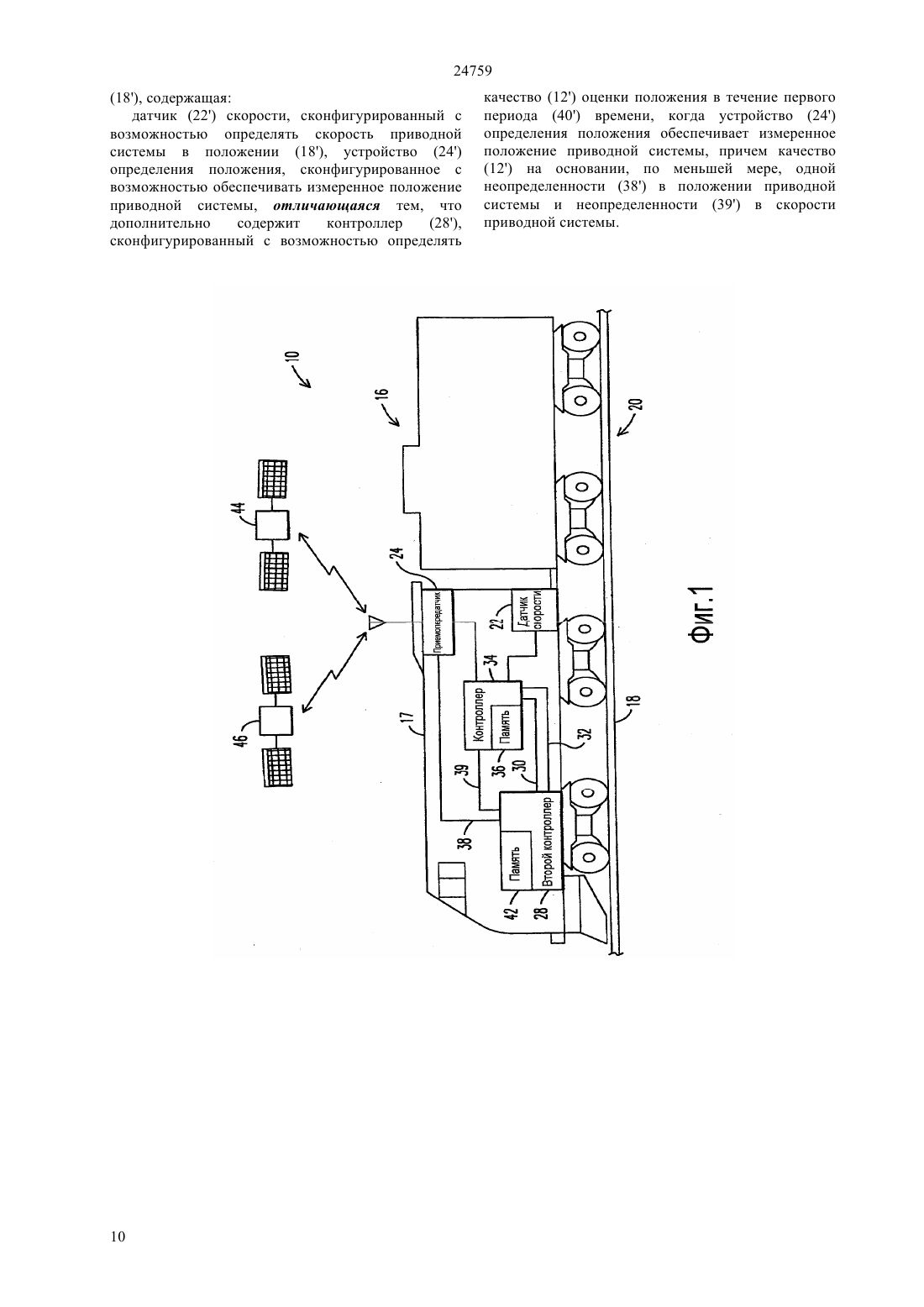
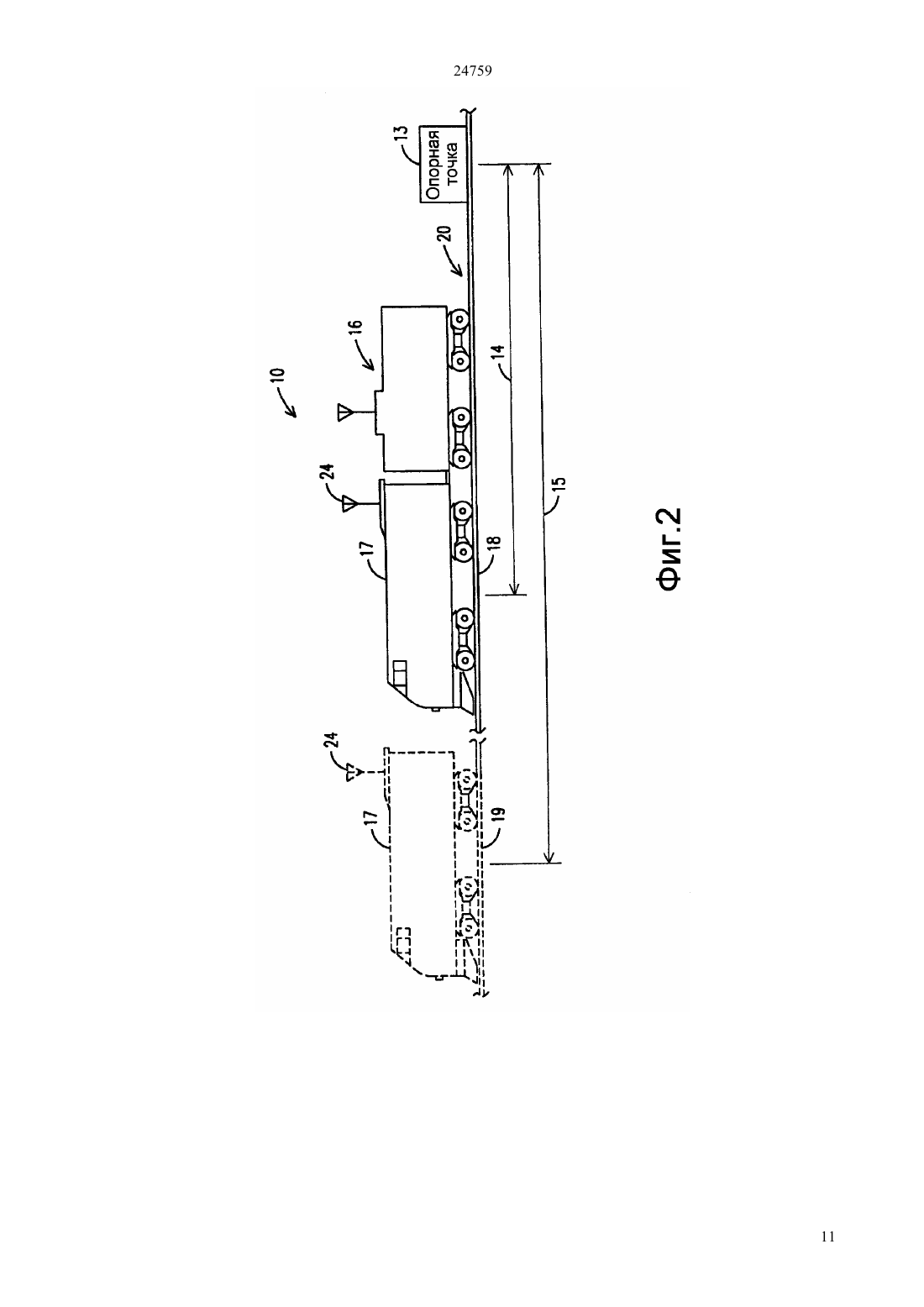
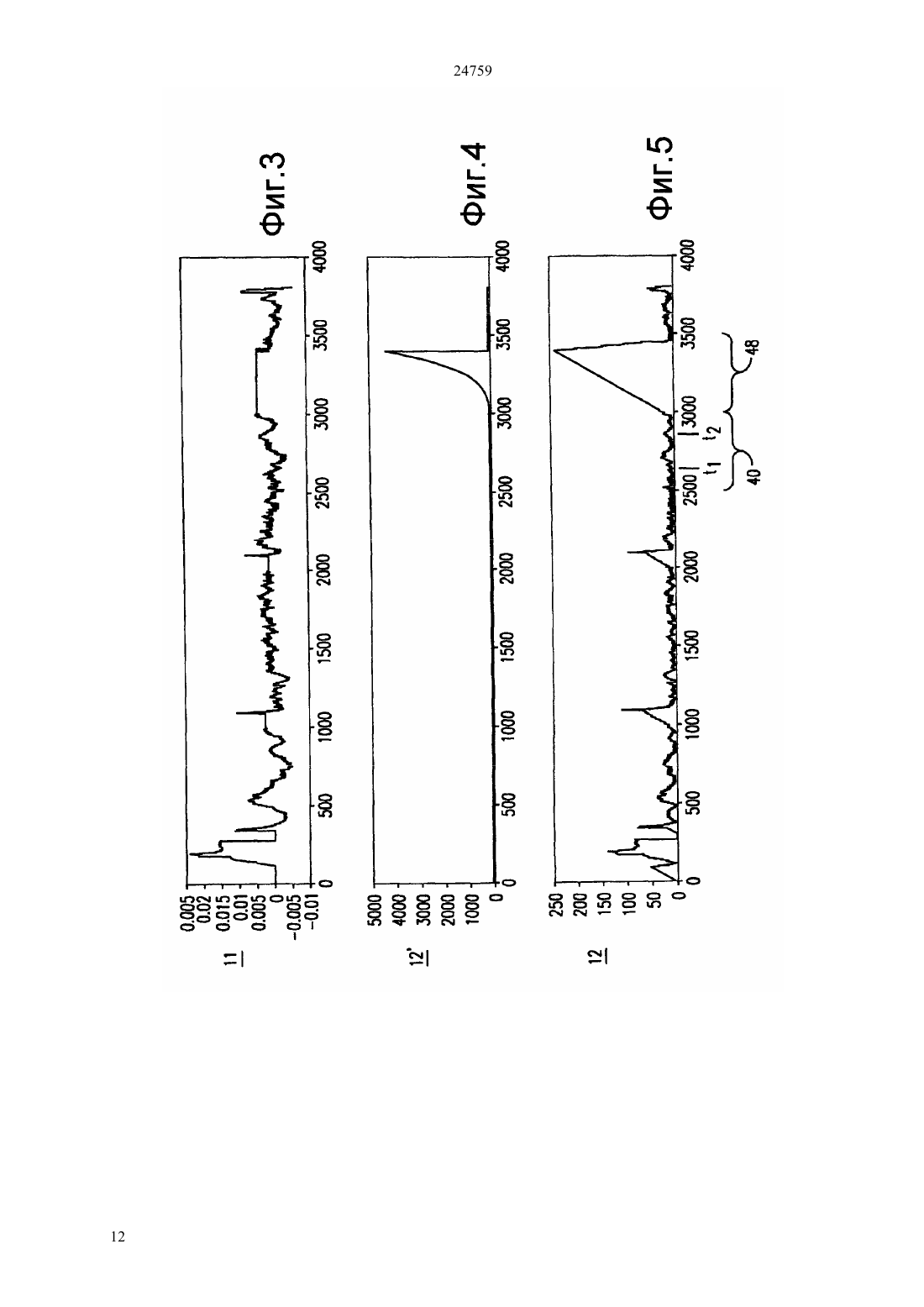
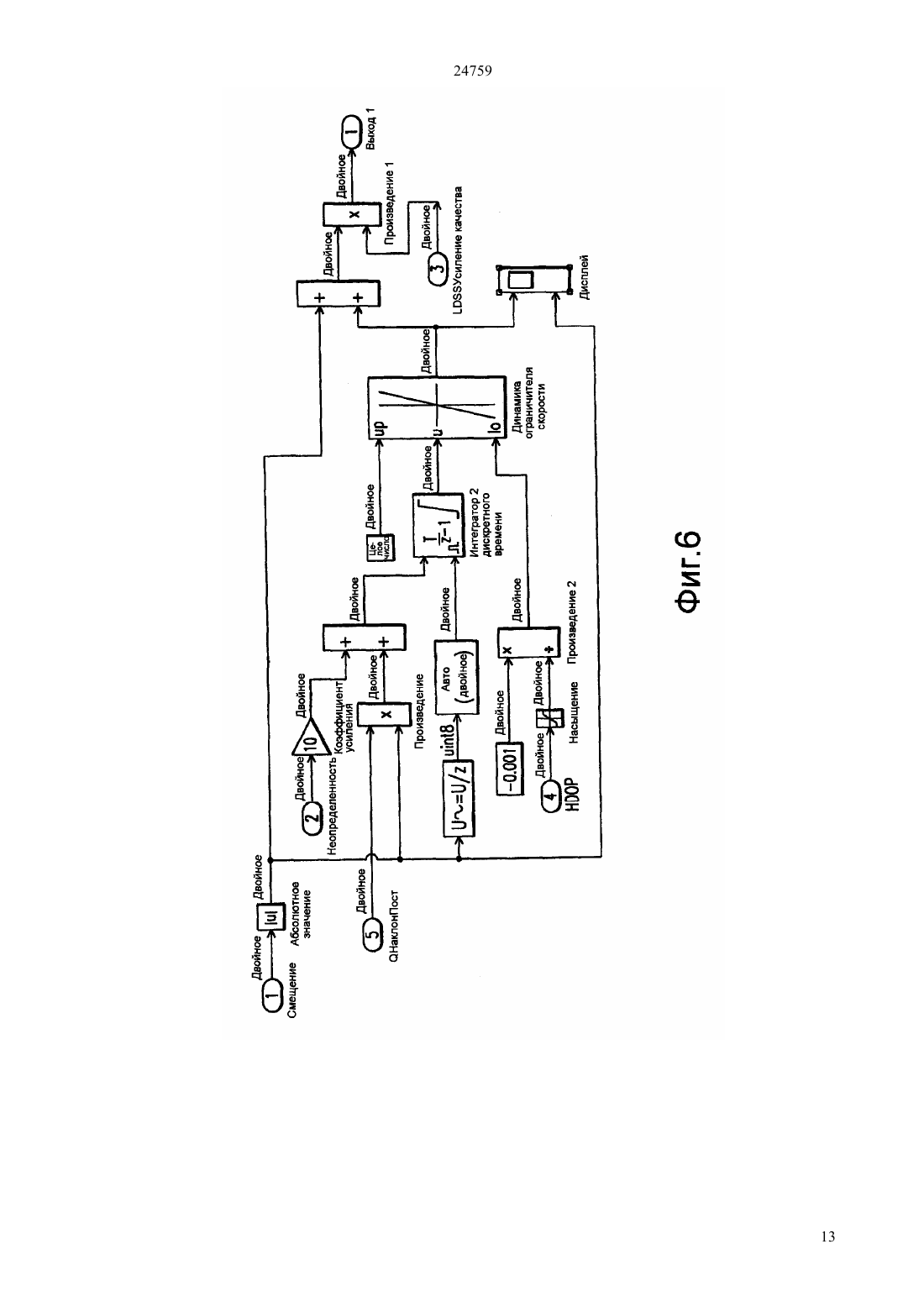
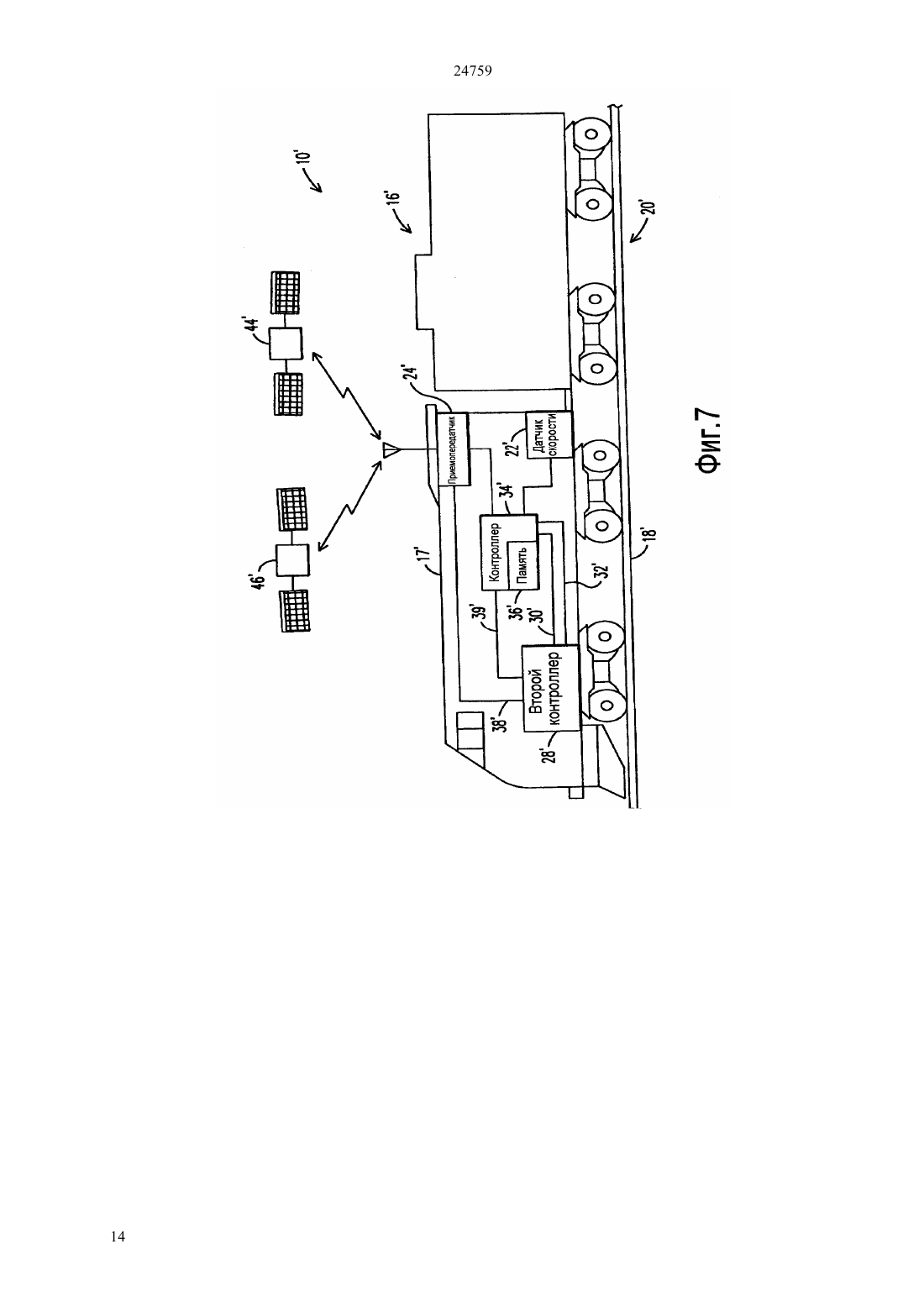
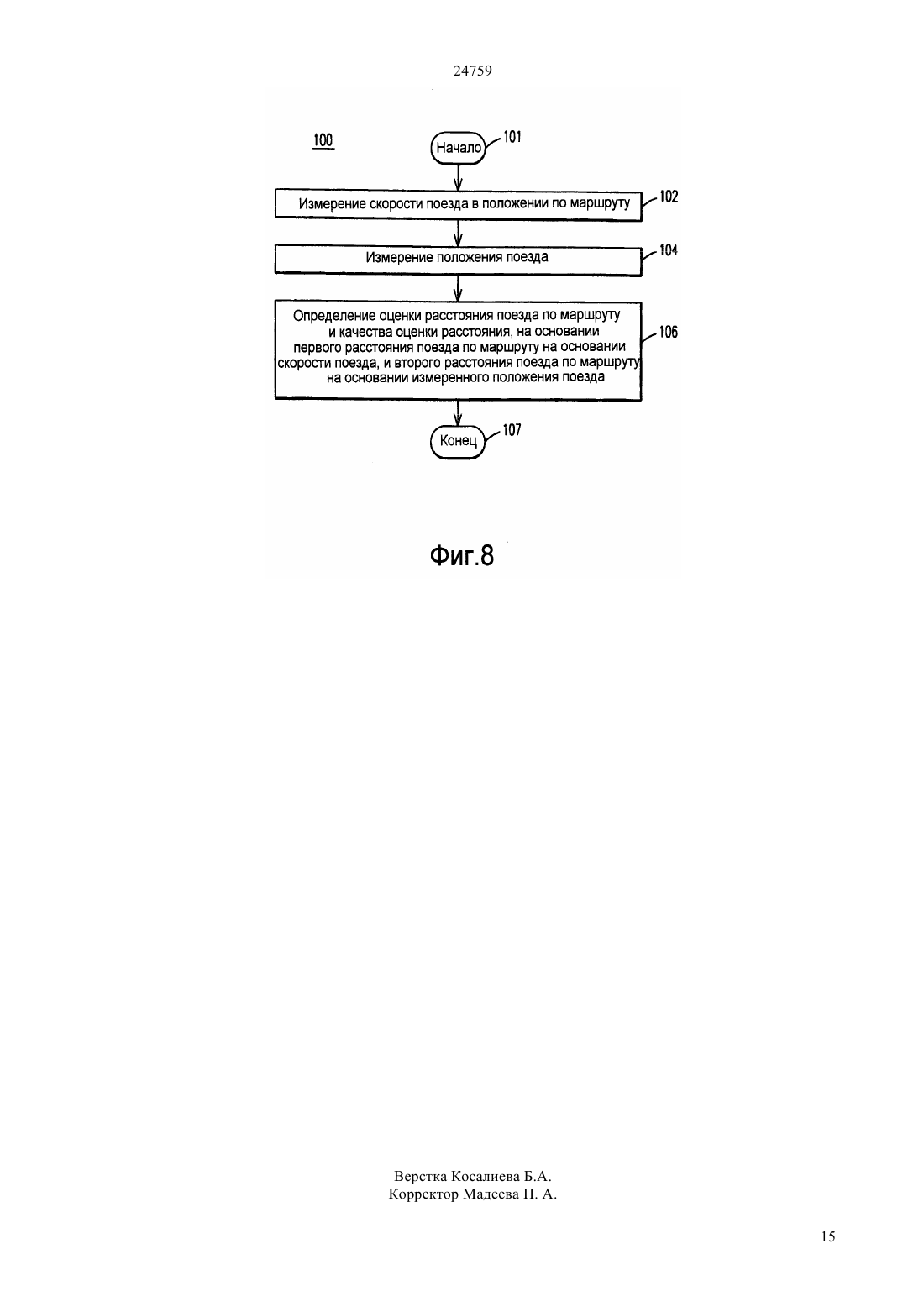
(51) 61 25/02 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(22), выполненный с возможностью измерять первый параметр приводной системы в положении. Система дополнительно включает в себя второй датчик (24),выполненный с возможностью измерять второй параметр приводной системы в положении. Система дополнительно включает в себя второй контроллер(28), выполненный с возможностью определять оценку положения приводной системы и качество(12) оценки положения, на основании первого положения (30) приводной системы на основании первого параметра и второго положения (32) приводной системы на основании второго параметра приводной системы. Также предусмотрен способ (100) для определения качества (12) оценки (14) положения приводной системы в положении (18).(54) СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ КАЧЕСТВА ОЦЕНКИ ПОЛОЖЕНИЯ ПРИВОДНОЙ СИСТЕМЫ(57) Предусмотрена система (10) для определения качества (12) оценки (14) положения приводной 24759 Рельсовые транспортные средства, такие как поезд, имеющий один или несколько локомотивов,например, едут по маршруту из одного положения в другое. Некоторые поезда движутся по маршруту в автоматическом режиме, в котором, до поездки по маршруту, контроллер заранее определяет один или несколько параметров поезда, таких как скорость и настройки уровня, например, в каждом положении по маршруту. Для предварительного определения параметра(параметров) поезда в каждом положении по маршруту, контроллер может использовать память, в которой заранее сохранена характеристика маршрута в каждом положении,такая как, например, уклон. При поездке по маршруту,важно, чтобы контроллер знал положение поезда, чтобы гарантировать, что фактический (фактические) параметр (параметры) поезда следуют заранее определенному(определенным) параметру (параметрам) поезда, в каждом положении поезда. Дополнительно,поскольку маршрут может включать в себя различные ограничения параметров поезда, такие как,например,ограничение по скорости,контроллер должен знать, когда положение поезда приближается к положению ограничения параметра поезда, для регулировки параметра (параметров) поезда, при необходимости, для согласования с ограничением параметра поезда. Альтернативно,поезд может ехать по маршруту в ручном режиме, в котором оператор поезда отвечает за ручную регулировку параметра(параметров) поезда. Как и в автоматическом режиме, при поездке по маршруту, важно, чтобы оператор поезда знал положение поезда, например,когда положение поезда приближается к положению ограничения параметра поезда. Затем оператор поезда вручную регулирует параметр (параметры) поезда для согласования с ограничением параметра поезда. Кроме того, в 5129605 раскрывается система позиционирования рельсового транспортного средства, имеющая множество входных сигналов,используемых для формирования сообщения о положении, включающих в себя сигналы от приемника, тахометра, специальных схем, и мануальных входных сигналов от машинистов локомотива. В 2000247235 раскрывается система для определения абсолютного положения поезда посредством включения средства получения информации об ошибках генератора спидометра,средства получения информации об ошибках заземленной детали и входного сигнала с выхода гироскопа скорости вала и средства получения информации об ошибках гироскопа скорости для коррекции действительного абсолютного положения. В 2230885 раскрывается система мониторинга железнодорожной сети, которая контролирует положение и скорость поезда на маршруте, включая в себя сигналы от системы глобального позиционирования. Эти сигналы поступают в процессор (5), который определяет 2 положение поезда (1). Скорость поезда (1) измеряется датчиком (6) скорости и измеренное значение вводится в процессор (5). Процессор (5) имеет доступ к цифровой кодированной информации из хранилища (7) информации карты питии движения поезда и соответствующей информации о скорости. Процессор (5) сравнивает определенное положение поезда с картой, и сравнивает известную скорость поезда (1) с максимально допустимой скоростью,запрограммированной в хранилище информации для этого конкретного положения. Положение поезда,скорость и разность и допустимым максимумом отображаются на блоке(8) визуального отображения. Традиционные системы выполнены с возможностью способствовать контроллерам в автоматическом режиме и операторам поезда в ручном режиме, обеспечивать положение поезда,когда поезд едет по маршруту. Однако эти традиционные системы опираются исключительно на глобальную спутниковую систему определения местоположения , которая обеспечивает одно измерение положения поезда, на основании спутниковой или другой системы определения местоположения, с использованием, например,беспроводной сети или придорожного оборудования. Приняв измерение системы определения местоположения, контроллер обычно использует свою память для преобразования этого необработанного измерения положения в измерение расстояния по маршруту. Как и любая система измерения, система измерения положения подвержена ошибкам,например, если -приемнику поезда не удается связаться с достаточным количеством спутников,или ошибке в памяти контроллера, в результате чего, например, точное необработанное измерениеможет преобразовываться в неточное измерение расстояния по маршруту. Соответственно, было бы выгодно обеспечить независимое измерение расстояния помимо измеренияпо маршруту, что позволило бы гарантировать,что оценка расстояния,предоставляемая контроллеру или оператору поезда,достаточно надежна. Дополнительно, было бы выгодно определить значение качества оценки расстояния, предоставляемой контроллеру или оператору поезда. В одном варианте осуществления настоящего изобретения,предусмотрена система для определения качества оценки положения приводной системы в положении. Система включает в себя первый датчик, выполненный с возможностью измерять первый параметр приводной системы в положении. Система дополнительно включает в себя второй датчик, выполненный с возможностью измерять второй параметр приводной системы в положении. Система дополнительно включает в себя второй контроллер,выполненный с возможностью определять оценку положения приводной системы и качество оценки положения,на основании первого положения приводной 24759 системы на основании первого параметра, и второго положения приводной системы на основании второго параметра приводной системы. В одном варианте осуществления настоящего изобретения,предусмотрена система для определения качества оценки положения приводной системы в положении. Система включает в себя датчик скорости, выполненный с возможностью определять скорость приводной системы в положении. Система дополнительно включает в себя устройство определения положения,выполненное с возможностью обеспечивать измеренное положение приводной системы. Система дополнительно включает в себя второй контроллер,выполненный с возможностью определять качество оценки положения в течение первого периода времени, когда устройство определения положения обеспечивает измеренное положение приводной системы. Качество основано,по меньшей мере, на одной неопределенности в положении приводной системы и неопределенности в скорости приводной системы. В одном варианте осуществления настоящего изобретения, предусмотрен способ определения качества оценки положения приводной системы в положении. Способ включает в себя измерение скорости приводной системы в положении и измерение положения приводной системы. Способ дополнительно включает в себя определение оценки положения приводной системы и качества оценки положения. Этап определения оценки положения и качества оценки положения основан на первом положении приводной системы, на основании скорости, и втором положении приводной системы на основании измеренного положения приводной системы. Более подробное описание вариантов осуществления изобретения, кратко описанного выше, будет приведено со ссылкой на конкретные варианты его осуществления,которые проиллюстрированы на прилагаемых чертежах. Понимая, что эти чертежи изображают только типичные варианты осуществления изобретения, и поэтому не призваны ограничивать его объем, будут описаны и объяснены варианты осуществления изобретения с дополнительной конкретизацией и детализацией с использованием прилагаемых чертежей, в которых фиг. 1 - вид сбоку иллюстративного варианта осуществления системы для определения качества оценки расстояния рельсового транспортного средства в положении по маршруту фиг. 2 - вид сбоку иллюстративного варианта осуществления системы для определения качества оценки расстояния рельсового транспортного средства во множестве положений по маршруту фиг. 3 - график иллюстративного варианта осуществления, качества оценки расстояния рельсового транспортного средства во множестве положений по маршруту фиг. 4 - график, иллюстративного варианта осуществления, качества оценки расстояния рельсового транспортного средства в во множестве положений по маршруту фиг. 5 - график иллюстративного варианта осуществления, качества оценки расстояния рельсового транспортного средства во множестве положений по маршруту фиг. 6 - структурная схема иллюстративного варианта осуществления второго контроллера,выполненного с возможностью определять качество оценки расстояния рельсового транспортного средства во множестве положений по маршруту фиг. 7 - вид сбоку иллюстративного варианта осуществления системы для определения качества оценки расстояния рельсового транспортного средства в положении по маршруту и фиг. 8 - блок-схема, иллюстрирующая иллюстративный вариант осуществления способа для определения качества оценки расстояния рельсового транспортного средства в положении по маршруту. При описании конкретных ссылок различных вариантов осуществления настоящего изобретения,номерные ссылки будут использоваться в связи с фигурами,сопровождающими описание. Аналогичные или идентичные номерные ссылки на разных фигурах можно использовать для указания аналогичных или идентичных компонентов между разными вариантами осуществления настоящего изобретения. Хотя иллюстративные варианты осуществления настоящего изобретения описаны применительно к рельсовым транспортным средствам или железнодорожным транспортным системам, в частности, поездам и локомотивам с дизельными двигателями,иллюстративные варианты осуществления изобретения применимы и к другим вариантам использования, например, в порядке примера, но не ограничения, вездеходным транспортным средствам,морским судам,стационарным узлам, и сельскохозяйственным транспортным средствам, пассажирским автобусам,в которых может использоваться, по меньшей мере,один дизельный двигатель или дизельный двигатель внутреннего сгорания. Для этого, при рассмотрении конкретной миссии, это включает в себя задачу или требование, осуществляемое дизельной приводной системой. Поэтому, в отношении применений железнодорожных,морских,перевозящих транспортных средств,сельскохозяйственных транспортных средств или вездеходных транспортных средств, это может относиться к перемещению системы из данного положения в пункт назначения. В случае стационарных применений, в порядке примера, но не ограничения,стационарной электростанции или сети электростанций,конкретная миссия может относиться к величине активной мощности(например, МВт/ч) или другому параметру или требованию,подлежащему удовлетворению дизельной приводной системой. Аналогично,рабочее состояние дизельного энергетического узла может включать в себя одно или несколько из скорости, нагрузки, величины потребления топлива,3 24759 распределения времени и т.д. Кроме того, хотя раскрыты дизельные приводные системы,специалисты в данной области техники могут предложить вариант осуществления изобретения с недизельными приводными системами, в порядке примера, но не ограничения, приводными системами на природном газе, биодизельными приводными системами и т.д. Кроме того,раскрытые здесь недизельные приводные системы, а также дизельные приводные системы, могут включать в себя множество двигателей, другие источники энергии и/или дополнительные источники энергии, в порядке примера, но не ограничения, батарейные источники, источники напряжения (в порядке примера, но не ограничения,конденсаторы), химические источники, источники на основе давления (в порядке примера, но не ограничения,расширения пружины и/или гидроразжима), источники тока (в порядке примера,но не ограничения, дроссели), инерциальные источники (в порядке примера, но не ограничения,устройства на основе маховика), гравитационные источники энергии и/или термические источники энергии. В одном иллюстративном примере,предусматривающем морские суда, множество буксиров могут действовать совместно, перемещая одно и то же крупное судно, причем действие всех буксиров скоординировано по времени для выполнения миссии перемещения крупного судна. В другом иллюстративном примере одно морское судно может иметь множество двигателей. Вездеходное транспортное средствоможет задействовать парк транспортных средств, которые имеют одну и ту же миссию перемещения по земле,из положения А в положение В, причем действия всехскоординированы по времени для выполнения миссии. В отношении стационарной электростанции, множество станций могут быть объединены друг с другом для совместной генерации энергии для конкретного положения и/или цели. В другом иллюстративном варианте осуществления предусмотрена одна станция, но с множеством генераторов, образующих одну станцию. В одном иллюстративном примере,предусматривающем локомотивные транспортные средства, множество дизельных приводных систем могут работать совместно, перемещая один крупный груз, причем все системы скоординированы по времени для выполнения миссии перемещения крупного груза. В другом иллюстративном варианте осуществления локомотивное транспортное средство может иметь более одной дизельной приводной системы. На фиг. 1-2 показан иллюстративный вариант осуществления системы 10 для определения качества 12 (фиг. 3-4) оценки 14 расстояния рельсового транспортного средства, такого как поезд 16, включающий в себя локомотив 17,например, в положении 18 по маршруту 20. Оценка 14 расстояния основана на опорной точке 13 по маршруту 20, такой как положение пункта назначения поездки, граница города, мильного 4 столба, придорожное устройство, или любой аналогичной опорной точке. Хотя опорная точка 13,показанная на фиг. 1, является предыдущим положением по маршруту 20, опорная точка может быть, например, будущим положением по маршруту. Хотя варианты осуществления,представленные на фиг. 1-7, иллюстрируют систему для определения качества оценки расстояния рельсового транспортного средства, такого как поезда, по маршруту, варианты осуществления настоящего изобретения можно применять для любой приводной системы, например, вездеходного транспортного средства,морского транспортного средства,помимо других применений, например, которые не ездят по рельсам. Варианты осуществления настоящего изобретения можно применять для определения оценки положения и соответствующего качества оценки положения - для этих приводных систем,поскольку приводные системы не обязательно проходят предписанное расстояние по заранее определенному маршруту, как, например, рельсовое транспортное средство. Система 10 включает в себя датчик 22 скорости,размещенный на локомотиве 17, для измерения скорости поезда 16 в положении 18 по маршруту 20. Датчик скорости может представлять собой традиционный датчик скорости любого типа,используемый для измерения скорости локомотива,что очевидно специалисту в данной области техники. Система 10 дополнительно включает в себя контроллер 34, подключенный к датчику 22 скорости. Контроллер 34 определяет первое расстояние 30 поезда 16 от опорной точки 13 по маршруту 2 0 на основании скорости поезда 16 из опорной точки 13 в положение 18 по маршруту 20. Как известно специалисту в данной области техники, контроллер 34 интегрирует скорость поезда 16 в период времени, в течение которого поезд 16 едет между опорной точкой 13 и положением 18, для определения первого расстояния 30. Хотя датчик 22 скорости,показанный на фиг. 1, выполнен с возможностью посылать данные скорости на контроллер 34, и контроллер 34 вычисляет первое расстояние 30, в иллюстративном варианте осуществления настоящего изобретения можно использовать датчики скорости, которые внутренне вычисляют первое расстояние 30, и затем передают первое расстояние на второй контроллер, что рассмотрено ниже. Помимо измеренной скорости, датчик 22 скорости выводит на контроллер 34 сигнал 39 неопределенности, который затем передается на второй контроллер (см. ниже) для определения качества 12 оценки 14 расстояния. Сигнал 39 неопределенности указывает уровень неопределенности в измеренной скорости поезда 16,и, будучи перестраиваемой постоянной, сигнал 39 неопределенности может поступать непосредственно от датчика 22 скорости, например,на второй контроллер 28. Система 10 дополнительно включает в себя устройство определения положения, например 24759 приемопередатчик 24, например, для обеспечения измеренного положения поезда 16. В иллюстративном варианте осуществления,приемопередатчик 24 является устройством глобальной спутниковой системы определения местоположения , например, выполненным с возможностью осуществлять связь с множеством спутников 44, 46 определения местоположения. Хотя на фиг. 1 показано два спутника 44, 46 определения местоположения, приемопередатчик 24 может быть выполнен с возможностью осуществлять связь, например, с более чем двумя спутниками определения местоположения. Дополнительно, в отличие от первого расстояния 30 поезда 16 от опорной точки 13 до положения 18 по маршруту 20, измеренное положение является необработанным положением поезда 16, например,на основании широты/долготы и, таким образом, не коррелирует с расстоянием от опорной точки 13 по маршруту 20. Хотя на фиг. 1 показан один приемопередатчик 24 (т.е. одно устройство определения положения), более чем одно устройство определения положения, например, два или более датчиков,придорожного оборудования, ручной ввод оператора локомотива(например, после распознавания мильного столба),или любая их комбинация. Дополнительно, хотя поезд 16, показанный на фиг. 1, включает в себя один локомотив, в поезд может быть включен более чем один локомотив, и каждый локомотив может использовать одно или несколько из вышеупомянутых устройств определения положения для определения оценки расстояния и качества соответствующей оценки расстояния для каждого локомотива. Используя более чем одно устройство определения положения,можно добиться более точной оценки расстояния и более высокого качества оценки расстояния. Например,если используется десять устройств определения положения, которые обеспечивают расстояния в пределах 21,3-21,4 миль, оценка расстояния в этих пределах будет иметь сравнительно высокое качество. Однако, если используется лишь два устройства определения положения, которые обеспечивают расстояния 25 и 30 миль, оценка расстояния на основании этих расстояний будет иметь сравнительно низкое качество. В иллюстративном варианте осуществления, при определении оценки 14 расстояния, второй контроллер (см. ниже) может вычислять среднее значение или стандартное отклонение для множества расстояний, обеспеченных множеством устройств определения положения. Например, если десять устройств определения положения обеспечивают десять расстояний со средним значением 21,3 мили, его можно использовать в качестве оценки расстояния. Однако второй контроллер может оценивать стандартное отклонение для этих десяти расстояний, которые,например, могут варьироваться в пределах 18-27 миль, и, таким образом, качество оценки расстояния может базироваться на стандартном отклонении. Контроллер 34 подключен к приемопередатчику 24. Контроллер 34 преобразует измеренное положение поезда 16 во второе расстояние 32 поезда 16 по маршруту 20 на основании памяти 36 контроллера 34, где хранится второе расстояние 32 поезда 16 по маршруту 20, на основании измеренного положения. Таким образом, в памяти 36, по сути, хранится список измеренных положений (в виде широты/долготы) для всего маршрута 20, и расстояние каждого измеренного положения от конкретной опорной точки 13 по маршруту 20. Хотя приемопередатчик 24,показанный на фиг. 1, передает на контроллер 34 измеренное положение,которое затем преобразуется во второе расстояние 32 от опорной точки 13 по маршруту 20, приемопередатчик может включать в себя внутреннюю память, аналогичную памяти 36 контроллера 34, который осуществляет это преобразование. Помимо измеренного положения, приемопередатчик 24 выводит сигнал 38 неопределенности на второй контроллер (см. ниже) для определения качества 12 оценки 14 расстояния. Сигнал 38 неопределенности указывает уровень неопределенности в измеренном положении поезда 16 и может отражать,например, количество спутников 44, 46 определения местоположения,успешно осуществляющих связь с приемопередатчиком. Сигнал 38 неопределенности может представлять собой величину снижения точности , которое является безразмерной величиной от 1 до 5, что известно специалисту в данной области техники, причем более высокая величина указывает большую неопределенность в измеренном положении поезда 16. Система 10 дополнительно включает в себя второй контроллер 28, который выполнен с возможностью определять оценку 14 расстояния поезда 16 в положении 18 по маршруту 20, и качество 12 оценки 14 расстояния поезда 16 в положении 18 по маршруту 20. Согласно фиг. 1,второй контроллер 28 определяет оценку 14 расстояния и качество 12 оценки расстояния на основании четырех входных сигналов первого расстояния 30 поезда 16 по маршруту 20 на основании скорости поезда, второго расстояния 32 поезда 16 по маршруту 20 на основании измеренного положения поезда 16, сигнала 39 неопределенности, обеспеченного от датчика 22 скорости, и сигнала 38 неопределенности,обеспеченного от приемопередатчика 24. Хотя на фиг. 1 показано, что второй контроллер 28 базирует свое определение оценки 14 расстояния и качества 12 оценки 14 расстояния на основе четырех входных сигналов первого расстояния 30, второго расстояния 32, сигнала 39 неопределенности и сигнала 38 неопределенности, второй контроллер 28 может базировать свое определение оценки 14 расстояния и качества 12 на основе менее или более чем эти четыре входных сигнала. В одном иллюстративном варианте осуществления, второй контроллер является, например, фильтром Калмана. Как дополнительно показано в иллюстративном варианте осуществления на фиг. 1, второй 5 24759 контроллер 28 включает в себя память 42. В памяти 42 хранятся предыдущие оценки расстоянияи соответствующие предыдущие значения качества для предыдущих положений от положения 18 по маршруту 20. Согласно иллюстративным вариантам осуществления, показанным на фиг. 3-4, где изображены графики зависимости от времени качества 11 (фиг. 3), 12 (фиг. 4) оценки 14 расстояния по времени, в течение первого периода 40 времени (приблизительно 200 0-2 500 на фиг. 34), приемопередатчик 24 обеспечивает измеренное положение поезда 16. В течение этого первого периода 40 времени, второй контроллер 28 определяет качество 11, 12 оценки 14 расстояния на основании первого расстояния 30, второго расстояния 32, сигнала 38 неопределенности и предыдущих значений качества, обеспеченных из памяти 42 второго контроллера. Хотя иллюстративный вариант осуществления настоящего изобретения предусматривает, что второй контроллер 28 определяет качество 11, 12 на основании первого расстояния 30, второго расстояния 32, сигнала 38 неопределенности и предыдущих значений качества, второй контроллер 28 может определять качество 11, 12 на основании менее или более чем эти значения. Качество 12 согласно иллюстративному варианту осуществления, показанному на фиг. 4 (в футах),является абсолютным значением качества 11 согласно иллюстративному варианту осуществления, показанному на фиг. 3, за исключением второго периода 48 времени, когда приемопередатчику 24 не удается обеспечить измеренное положение поезда 16 (рассмотрено ниже). Например, если в момент времени 12600, в течение первого периода 40 времени, первое расстояние 30 равно 100 футов, второе расстояние 32 равно 95 футов, сигнал 38 неопределенности равен 4 (высокий), и предыдущее значение качества до 1 равно 3 фута, второй контроллер 28 может определить, что качество 12 равно 4 фута. Поскольку сигнал 38 неопределенности высок,второй контроллер 28, вероятно, увеличит качество 12 от его прежнего значения 3 фута, до значения 4 фута. Таким образом, второй контроллер 28, по существу, непрерывно передает качество 12, на основании сигнала 38 неопределенности, первого расстояния 30, второго расстояния 32 и предыдущего (предыдущих) значения (значений) качества. Кроме того, второй контроллер 28 вычисляет оценку 14 расстояния, прибавляя качество 12 ко второму расстоянию 32 (если второе расстояние 32 меньше первого расстояния 30), или вычитая качество 12 из второго расстояния 32, (если второе расстояние 32 больше первого расстояния 30). В этом примере, второе расстояние 32 меньше первого расстояния 30, поэтому второй контроллер 28 прибавляет качество 12 ко второму расстоянию 32, получая оценку расстояния 1495 футов 4 фута 99 футов. В продолжение этого примера, во второй момент времени 228 00 в течение первого периода 4 0 времени, первое расстояние 30 равно 250 футов, второе расстояние 32 равно 240 футов,6 сигнал 38 неопределенности равен 2 (низкий), и предыдущее качество 12 равно 3 фута, как вычислено ранее. Поскольку сигнал 38 неопределенности низок, второй контроллер 28,вероятно, снизит качество 12 от его прежнего значения 4 фута, например, до значения 3 фута. Дополнительно, второй контроллер 28 будет вычислять оценку 15 расстояния (фиг. 1) поезда 16 в более поздний момент времени 2 как сумму второго расстояния 32 и нового качества 12 240 футов 3 фута 243 фута. На фиг. 1 показаны оценки 14, 15 расстояния поезда 16 в соответствующие моменты времени 1, 2. Численные значения расстояний в вышеприведенных примерах являются только иллюстративными, и, таким образом, второй контроллер 28 может определять значения,идентичные вышеуказанным или отличные от них. Как известно специалисту в данной области техники, датчик 22 скорости непрерывно измеряет скорость локомотива 17, непрерывно обеспечивает информацией о скорости контроллер 34, и, таким образом, второй контроллер 28 принимает данные первого расстояния 30 на основе непрерывного интервала времени. Однако приемопередатчик 24 не регулярно обеспечивает непрерывные измеренные положения поезда 16, а, вместо этого, обеспечивает эти измеренные положения в рассредоточенные интервалы времени, например, на основании доступности спутниковых сигналов, помимо других факторов. Таким образом, второй контроллер 28 принимает данные второго расстояния 32 от контроллера 34 на основе рассредоточенных интервалов времени. На основании различия между непрерывными и рассредоточенными интервалами времени соответствующих первого и второго расстояний 30, 32 данные обеспечиваются на второй контроллер 28, причем второй контроллер 28 динамически определяет качество 12 оценок расстояния на основе рассредоточенных интервалов времени, которое, по существу, действует как коррекция первого расстояния 30, обеспеченного на основе непрерывного интервала времени. Как дополнительно показано в иллюстративном варианте осуществления на фиг. 3-4, в течение второго периода 48 времени (приблизительно 3000-3500), приемопередатчик 24 прекращает обеспечивать измеренное положение поезда 16. Для определения, прекратил ли приемопередатчик 24 обеспечивать измеренное положение поезда 16,контроллер 34 сравнивает первое расстояние 30 и второе расстояние 32 для определения точности второго расстояния 32 относительно первого расстояния 30, и, дополнительно, для определения,падает ли точность ниже порогового уровня для порогового периода времени. Если контроллер 34 определяет, что приемопередатчик 24 прекратил обеспечивать любое измеренное положение, или что измеренное положение не является достаточно точным, контроллер посылает сигнал на второй контроллер 28 для изменения его способа вычисления качества 12 оценки 14 расстояния, что рассмотрено ниже. В течение второго периода 48 времени, качество 11 на фиг. 3, по существу, ровное, 24759 как в этом конкретном варианте осуществления,второй контроллер 28, в сущности, уравнивает текущее качество с предыдущим значением качества. Однако, для качества 12 оценки 14 расстояния, согласно варианту осуществления на фиг. 4, второй контроллер 28 определяет повышение качества 12 на основании значения качества до того,как приемопередатчик 24 прекратит обеспечивать измеренное положение поезда 16, и двух регулируемых постоянных 1, 2, на основании неопределенности в скорости поезда 16, следующим образом Повышение качества К 2 Предыдущее качество 1 Соответственно, в течение начального участка второго периода 48 времени на фиг. 4, качество 12, по существу, является возрастающей линией, наклон на основании произведения предыдущего качества до того, как приемопередатчик 24 прекратит обеспечивать измеренное положение, и регулируемой постоянной К 2, на основании неопределенности скорости. В течение второго периода 48 времени, когда приемопередатчик 24 начинает осуществлять обратную связь с контроллером 34, второй контроллер 28 определяет снижение качества 12 на основании предыдущего качества до того, как приемопередатчик 24 начинает осуществлять обратную связь, для обеспечения измеренного положения поезда 16 и наклона на основании сигнала 38 неопределенности, следующим образом Снижение качестваПредыдущее качествонаклон (на основании сигнала неопределенности) Соответственно, чем ниже значение сигнала 38 неопределенности,обеспечиваемое от приемопередатчика 24, тем больше снижение качества обратно к диапазону значений качества до того, как приемопередатчик 24 прекратит обеспечивать измеренное положение. Как очевидно специалисту в данной области техники, качество 12 возрастает, когда приемопередатчик 24 прекращает обеспечивать измеренное положение, поскольку используется только одно измерение расстояния(скорости), и измерение расстоянияне будет опираться на него в значительной степени, пока 38 сигнал неопределенности не станет вновь сравнительно низким. Контроллер 34 может переключаться в автоматический режим. В автоматическом режиме,контроллер 34 определяет начальный параметр поезда 16 для каждого положения по маршруту 20 до того, как поезд 16 начнет ехать по маршруту 20. В автоматическом режиме, контроллер 34 использует оценку 14 расстояния и качество 12 оценки расстояния для регулирования начального параметра в предстоящем положении 19 (фиг. 1) до измененного параметра для предстоящего положения 19 (фиг. 1) по маршруту 20. Например,контроллер 34 в автоматическом режиме может использовать оценку 14 расстояния и качество 12 в начальном положении положение 18, в наихудшем сценарии, при определении, изменять ли начальный параметр, запланированный для предстоящего положения 19. Например, если качество 12 оценки 14 расстояния равно 10 футов, то контроллер 34 может планировать переустановить начальный параметр в предстоящем положении 19 в положение на 10 футов короче предстоящего положения 19, в зависимости от важности установки начального параметра в предстоящем положении 19. Дополнительно, контроллер 34 может использовать оценку 15 расстояния предстоящего положения 19 для подтверждения, когда поезд 16 фактически находится в предстоящем положении 19, для отслеживания точности начального параметра в предстоящем положении 19. В частности, в иллюстративном варианте осуществления, если начальным параметром является скорость поезда 16,оценку 14 расстояния и качество 12 оценки расстояния можно использовать для регулировки начального параметра скорости поезда до измененного параметра скорости на расстоянии до предстоящего положения 19 поезда (где качество 12 можно использовать для определения расстояния до предстоящего положения 19), для согласования с ограничением по скорости в предстоящем положении 19 по маршруту 20. Контроллер 34 способен переходить из автоматического режима в ручной режим, в котором оператор поезда определяет начальный параметр поезда в каждом положении по маршруту. Контроллер 34 является переключаемым из автоматического режима в ручной режим, в котором оператор поезда определяет начальный параметр поезда в каждом положении по маршруту. Контроллер 34 выполнен с возможностью переключаться из автоматического режима в ручной режим, когда качество 12 оказывается вне заранее определенного допустимого диапазона, хранящегося в памяти 36 контроллера 34. На фиг.6 показана структурная схема иллюстративного варианта осуществления внутренних операций,например,второго контроллера 28. На фиг.6 всего лишь представлен пример одной конфигурации структурной схемы второго контроллера 28, и, таким образом,возможны другие конфигурации структурной схемы. На фиг. 7 показан дополнительный вариант осуществления системы 10 для определения качества 12 оценки расстояния поезда 16 в положении 18 по маршруту 20. Система 10 включает в себя датчик 22 скорости для определения скорости поезда 16 в положении 18 по маршруту 20. Система 10 дополнительно включает в себя приемопередатчик 24 для измерения положения поезда 16. Система 10 дополнительно включает в себя второй контроллер 28 для определения качества 12 оценки расстояния в течение первого периода 40 времени, когда приемопередатчик 24 измеряет положение поезда 16 . Как показано на графиках на фиг. 5 и фиг. 7,качество 12 основано на сигнале 38 неопределенности и сигнале 39 неопределенности в скорости поезда 16. Хотя иллюстративный вариант осуществления предусматривает, что качество 12 основано на сумме неопределенностей в измеренном положении и скорости, качество 12 7 24759 может быть основано только на одной из этих неопределенностей. Как показано на графике,представленном на фиг. 5, в течение второго периода 48 времени, поскольку качество 12 основано на сумме неопределенностей в скорости и измеренном положении, качество 12 непрерывно возрастает до большой величины (приблизительно 4000 футов), однако другие версии системы 10 можно отрегулировать так, чтобы качество 12 не возрастало непрерывно до таких больших величин. Второй контроллер 28 выполнен с возможностью определять оценку расстояния на основании первого расстояния 30, второго расстояния 32 и качества 12 оценки расстояния. На фиг.8 показана блок-схема иллюстративного варианта осуществления способа 100 для определения качества 12 оценки 14 расстояния поезда 16 в положении 18 по маршруту 20. Способ 100 начинается на этапе 101 путем измерения 102 скорости поезда 16 в положении 18 по маршруту 20. Способ 100 дополнительно включает в себя измерение 104 положения поезда 16. Способ 100 дополнительно включает в себя определение 106 оценки 14 расстояния поезда 16 по маршруту 20 и качества 12 оценки расстояния, на основании первого расстояния 30 поезда 16 по маршруту 20 на основании скорости поезда, и второго расстояния 32 поезда 16 по маршруту 20 на основании измеренного положения поезда 16, до окончания на этапе 107. В вышеприведенном описании использованы примеры для раскрытия вариантов осуществления изобретения,включающих в себя предпочтительный, а также, чтобы специалист в данной области техники мог предлагать и использовать варианты осуществления изобретения. Патентуемый объем вариантов осуществления изобретения определяется формулой изобретения и может включать в себя другие примеры, понятные специалистам в данной области техники. Такие другие примеры призваны находиться в рамках объема формулы изобретения, если они имеют структурные элементы, которые не отличаются от буквального смысла формулы изобретения, или если они включают в себя эквивалентные структурные элементы с незначительными отличиями от буквального смысла формулы изобретения. Описание ссылочных позиций чертежей Позиция 10 10 11 12 13 14 15 16 17 18 19 20 20 22 22 24 24 28 28 30 30 32 32 34 36 38 38 39 39 40 40 Наименование система система качество качество опорная точка оценка расстояния оценка расстояния поезд локомотив положение предстоящее положение маршрут маршрут датчик скорости датчик скорости приемопередатчик приемопередатчик второй контроллер второй контроллер первое расстояние первое расстояние второе расстояние второе расстояние контроллер память сигнал неопределенности сигнал неопределенности сигнал неопределенности сигнал неопределенности первый период времени первый период времени 24759 Продолжение таблицы память второго контроллера множество спутников определения местоположения второй период времени способ измерение измерение определение 42 44 48 100 102 104 106 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система (10) определения положения приводной системы, содержащая по меньшей мере, один датчик (22),сконфигурированный с возможностью измерять параметр приводной системы в положении (18), по меньшей мере, одно устройство (24) определения положения, сконфигурированное с возможностью измерять положение приводной системы в упомянутом положении, отличающаяся тем, что дополнительно содержит, по меньшей мере, один контроллер (34, 28, 34, 28), сконфигурированный с возможностью принимать измеренный параметр от,по меньшей мере, одного датчика (22) и измеренное положение от, по меньшей мере, одного устройства(24) определения положения и дополнительно определять оценку (14) положения и качество (12) оценки (14) положения. 2. Система (10) по п.1, отличающаяся тем, что,по меньшей мере, один контроллер (34, 28, 34, 28) использует данные, хранимые в памяти для преобразования измеренного положения в измерение расстояния, а также использует параметр,измеренный, по меньшей мере, одним датчиком (22) для вычисления измерения расстояния от опорной точки (13) вдоль маршрута (20) приводной системы. 3. Система (10) по п.1, отличающаяся тем, что,по меньшей мере,один датчик(22) сконфигурирован с возможностью измерять параметр приводной системы в положении (18) вдоль маршрута (20), и, по меньшей мере, один контроллер (34, 28, 34, 28) сконфигурирован с возможностью определять оценку (14) расстояния приводной системы по маршруту (20) и качество(12) оценки расстояния, на основании измеренного положения приводной системы. 4. Система (10) по п. 3, отличающаяся тем, что содержит, по меньшей мере, один контроллер (34,28, 34, 28), содержащий, по меньшей мере, первый контроллер (34, 34) и второй контроллер (28, 28),сконфигурированные с возможностью определять качество оценки (14) расстояния на основании первого расстояния (30), второго расстояния (32),сигнала (38, 39) неопределенности и некоторых предшествующих значений качества,обеспечиваемых памятью (42) второго контроллера. 5. Система по п. 4, отличающаяся тем, что, по меньшей мере, одно устройство (24) определения положения сконфигурировано с возможностью передавать сигнал (38) неопределенности на второй контроллер (28, 28), причем сигнал (38) неопределенности указывает уровень неопределенности в измеренном положении приводной системы, по меньшей мере, один датчик(22) сконфигурирован с возможностью передавать сигнал (39) неопределенности на первый контроллер(34, 34), причем сигнал (39) неопределенности затем повторно передается на второй контроллер(28, 28), причем сигнал неопределенности указывает уровень неопределенности в измеренной скорости приводной системы. 6. Система (10) по любому из п.п.1-5,отличающаяся тем, что, по меньшей мере, один датчик(22) содержит датчик скорости,сконфигурированный с возможностью определять скорость приводной системы в положении по маршруту, по меньшей мере, одно устройство (24) определения положения содержит глобальную систему навигации и определения положения ,сконфигурированную с возможностью измерять положение приводной системы в положении по маршруту. 7. Система по любому из п.п. 1-6,отличающаяся тем, что приводная система содержит поезд (16), имеющий множество локомотивов (17), причем каждый локомотив (17) содержит, по меньшей мере, один датчик (22) и, по меньшей мере, одно устройство (24) определения положения. 8. Система по п.7, отличающаяся тем, что каждый локомотив (17) содержит, по меньшей мере,один контроллер (34, 28, 34, 28). 9. Система по п. 2, отличающаяся тем, что, по меньшей мере, один контроллер (34, 28, 34, 28) сконфигурирован с возможностью определять оценку (14) расстояния приводной системы по маршруту (20) и качество оценки (14) расстояния на основании измеренного положения приводной системы. 10. Система по любому из п.п.1-9,отличающаяся тем, что, по меньшей мере, один контроллер (34, 28, 34, 28) использует измерение расстояния из, по меньшей мере, одного датчика(22) и из, по меньшей мере, одного устройства (24) определения положения, оценку положения и качество оценки положения для изменения управления приводной системы. 11. Система (10) для определения качества (12) оценки положения приводной системы в положении 9(18), содержащая датчик (22) скорости, сконфигурированный с возможностью определять скорость приводной системы в положении (18), устройство (24) определения положения, сконфигурированное с возможностью обеспечивать измеренное положение приводной системы, отличающаяся тем, что дополнительно содержит контроллер качество (12) оценки положения в течение первого периода (40) времени, когда устройство (24) определения положения обеспечивает измеренное положение приводной системы, причем качество(12) на основании, по меньшей мере, одной неопределенности (38) в положении приводной системы и неопределенности (39) в скорости приводной системы.
МПК / Метки
МПК: B61L 25/02
Метки: приводной, система, положения, системы, определения, способ, оценки, качества
Код ссылки
<a href="https://kz.patents.su/15-24759-sistema-i-sposob-dlya-opredeleniya-kachestva-ocenki-polozheniya-privodnojj-sistemy.html" rel="bookmark" title="База патентов Казахстана">Система и способ для определения качества оценки положения приводной системы</a>
Предыдущий патент: Устройство для установки модуля платформенной двери-перегородки
Следующий патент: Аэростанция
Случайный патент: Диафрагменная гидротурбина