Способ и система управления автоматизированным транспортным средством, способ определения его положения и ориентировки, способы планирования и прокладывания пути для него при движении по лабиринту
Номер патента: 14902
Опубликовано: 15.10.2004
Авторы: СТЁДЖИС, Роберт Х., ТУИГГЕР, Майкл, КАНАРАТ, Эмнарт
Формула / Реферат
Настоящее изобретение относится к автоматизированным машинам непрерывного действия и
способу их использования в подземных условиях.
Каждая подвижная портальная подвесная рама
(ПППР) 10 имеет средства измерения расстояния 70
и угла 74 для определения расположения ПППР 10 и
углового положения присоединенных контрейлерных конвейеров 30. Для регулирования высоты контрейлерных конвейеров 30 используют средство для
определения высоты кровли 76. На каждой ПППР
10 принимаются входные данные от различных датчиков через котроллер 80, который рассчитывает
положение и ориентацию ПППР 10 и присоединенных контрейлерных конвейеров 30. Затем контроллер планирует оптимальный путь движения для
ПППР 10 и вычисляет скорость движения для каждой независмо действующей гусеничной цепи
ПППР, так что ПППР 10 и контрейлерные конвейеры 30 продвигаются путем, наиболее близким к запланированному.
МПК / Метки
МПК: B62D 12/00, B62D 11/20, B62D 11/00
Метки: планирования, система, управления, ориентировки, средством, транспортным, положения, движении, способ, пути, автоматизированным, лабиринту, способы, прокладывания, него, определения
Код ссылки
<a href="https://kz.patents.su/0-14902-sposob-i-sistema-upravleniya-avtomatizirovannym-transportnym-sredstvom-sposob-opredeleniya-ego-polozheniya-i-orientirovki-sposoby-planirovaniya-i-prokladyvaniya-puti-dlya-nego-pri.html" rel="bookmark" title="База патентов Казахстана">Способ и система управления автоматизированным транспортным средством, способ определения его положения и ориентировки, способы планирования и прокладывания пути для него при движении по лабиринту</a>
Способ определения сейсмического профиля под границей раздела воздушной и водной сред, система для определения сейсмического профиля, система для определения сейсмического профиля под границей воздух/вода, система для определения сейсмического профиля в переходной зоне
Номер патента: 6917
Опубликовано: 15.08.2000
Авторы: Спрэдли, Майкл Т., Макдэвид, Вильям Терри, Молдовену, Николае
МПК: G01V 1/38
Метки: раздела, определения, профиля, способ, сейсмического, сред, водной, границей, переходной, система, зоне, воздушной
Формула / Реферат:
Система определения сейсмического профиля и способ использования вертикальных решеток датчиков обеспечивают получение сейсмического профиля под двумя высокоотражающими границами 19, 23. Система включает в себя источник сейсмической энергии, расположенный ниже границы раздела воздушной и водной сред 19, первую пару датчиков 25U, 25E, расположенных по вертикали на предварительно определенном расстоянии один от другого, и вторую пару датчиков 25X,...
Способ очистки проезжей поверхности колесным транспортным средством и устройство для его осуществления
Номер предварительного патента: 11861
Опубликовано: 15.08.2002
Автор: Халидуллин Олег Ханышевич
МПК: E01H 1/00
Метки: осуществления, транспортным, устройство, проезжей, поверхности, очистки, способ, колесным, средством
Формула / Реферат:
Изобретение относится к работам по очистке дорог, площадей, аэродромов и других поверхностей, предназначенных для проезда колесного транспорта, от загрязнений, преимущественно в виде грязи и мокрого снега.Техническим результатом изобретения является возможность сбора загрязнений и концентрации их на обочине проезжей части без использования специального сложного оборудования.Это достигается тем, что в способе очистки проезжей поверхности колесным...
Устройство для технического контроля рельсового пути при движении транспортного средства
Номер предварительного патента: 13994
Опубликовано: 16.02.2004
Авторы: Бекмагамбетов Мурат Махметович, Синельников Борис Иосифович
МПК: B61K 9/08, E01B 35/00
Метки: транспортного, средства, пути, устройство, контроля, рельсового, движении, технического
Формула / Реферат:
Изобретение относится к измерительным устройствам на железнодорожном транспорте, а именно, к устройствам для контроля отклонений от номинального значения ширины колеи рельсового пути. Техническим результатом изобретения является упрощение конструкции и повышение точности измерения отклонений от номинального значения ширины рельсовой колеи. Устройство для технического контроля рельсового пути при движении транспортного средства содержит датчик...
Способ определения ориентировки зерен поликристалла
Номер предварительного патента: 10014
Опубликовано: 15.03.2001
Авторы: Листунов Владимир Владимирович, Тастембеков Толемис Абылкакович, Назаров Юрий Константинович
МПК: H05H 7/00, H01J 37/295
Метки: ориентировки, зерен, способ, поликристалла, определения
Формула / Реферат:
Изобретение относится к области кристаллографии и электронной микроскопии. Рассматривается способ определения ориентировки зерен поликристалла с помощью электронного микроскопа, включающий подготовку образца в виде диска, утонение его путем механического шлифования, двустороннего электролитического полирования до образования отверстия в нем, фотосъемку дифракционной картины в электронном микроскопе и определение по ней ориентировки зерна с...
Система управления стояночным тормозом
Номер патента: 1814
Опубликовано: 15.03.1995
Автор: Халидуллин Олег Ханышевич
МПК: B60T 7/12
Метки: управления, тормозом, система, стояночным
Формула / Реферат:
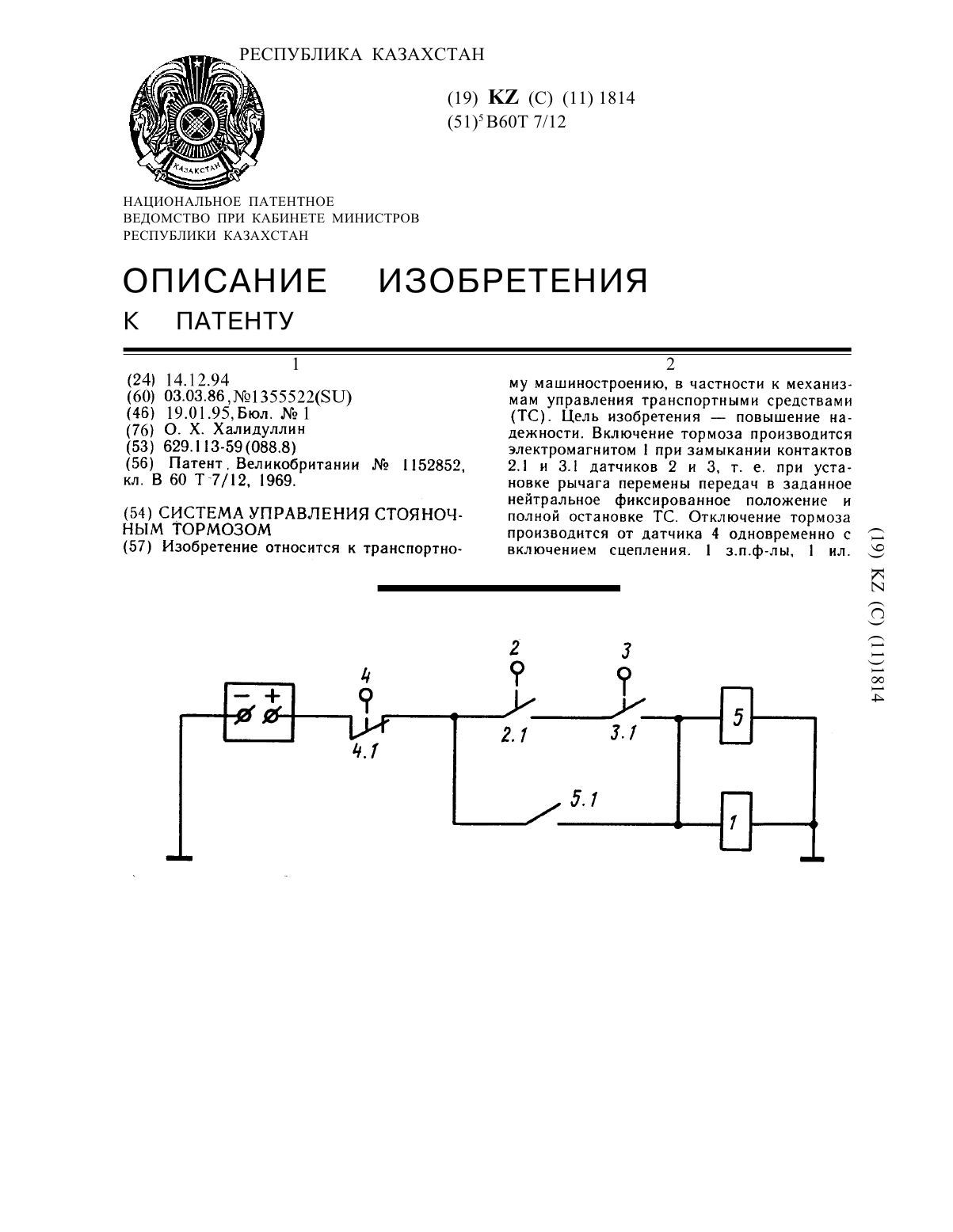
Изобретение относится к транспортному машиностроению, в частности к механизмам управления транспортными средствами (ТС). Цель изобретения — повышение надежности. Включение тормоза производится электромагнитом 1 при замыкании контактов 2.1 и 3.1 датчиков 2 и 3, т. е. при установке рычага перемены передач в заданное нейтральное фиксированное положение и полной остановке ТС. Отключение тормоза производится от датчика 4 одновременно с включением...
Предыдущий патент: Ударная мельница для тонкого измельчения зерна
Следующий патент: Устройство для биологической очистки сточных вод
Случайный патент: Пылеулавливающая установка