Адаптивная система управления глубиной погружения подводного аппарата
Номер инновационного патента: 23588
Опубликовано: 15.12.2010
Формула / Реферат
Изобретение относится к области автоматического управления подвижными объектами, в частности, автономными обитаемыми и необитаемыми подводными аппаратами (ПА).
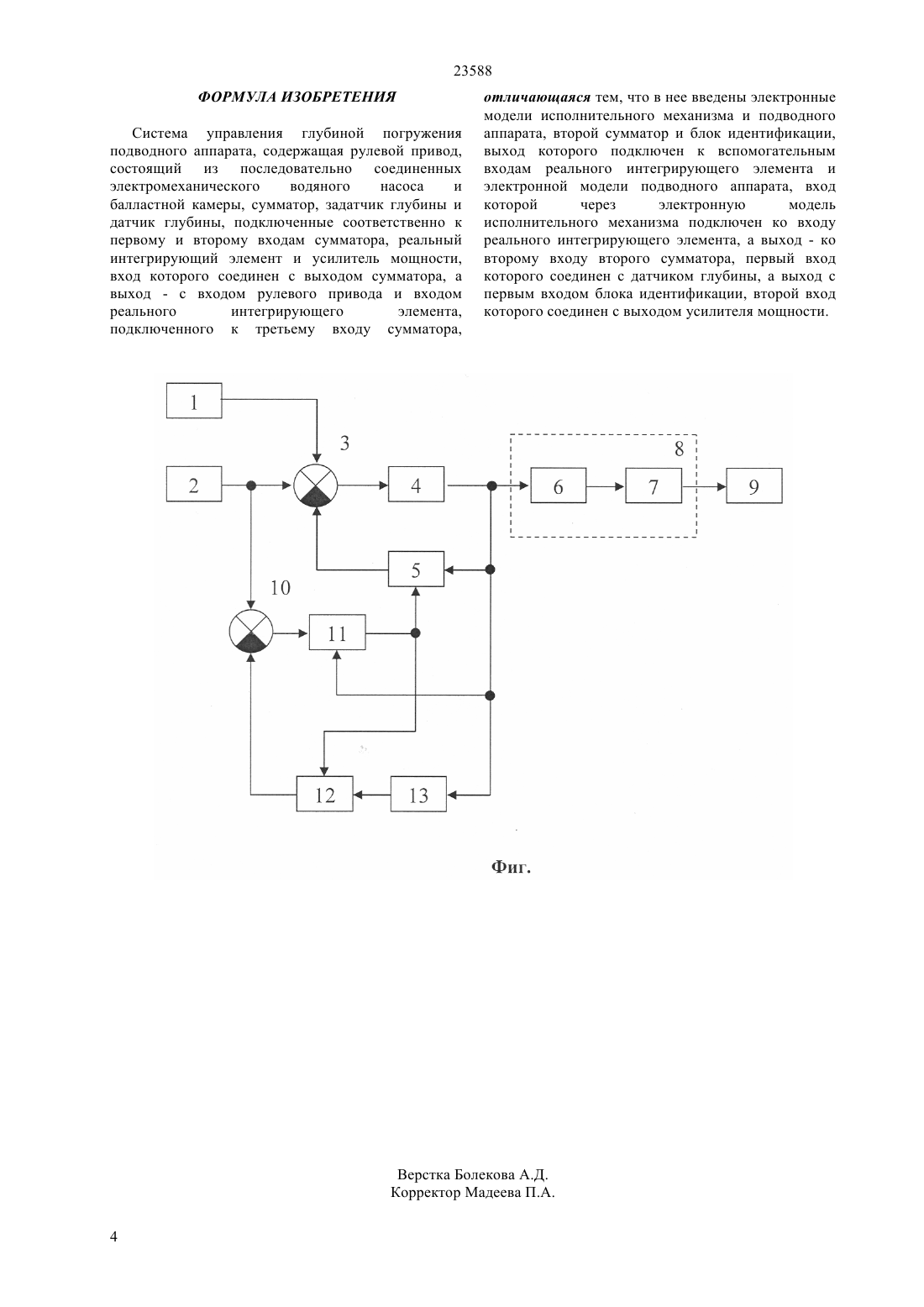
Система управления глубиной погружения подводного аппарата содержит рулевой привод, состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, подводный аппарат, первый и второй сумматоры, электронные модели исполнительного механизма и подводного аппарата, блок идентификации, задатчик глубины и датчик глубины, подключенные соответственно к первому и второму входам сумматора, реальный интегрирующий элемент и усилитель мощности, вход которого соединен с выходом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу первого сумматора, вход которого соединен с первым входом второго сумматора, выход которого подключен к первому входу блоку идентификации, второй вход которого соединен с выходом усилителя мощности, а выход - с вспомогательными входами реального интегрирующего элемента и электронной модели подводного аппарата, вход которой через электронную модель исполнительного механизма подключен к входу реального интегрирующего элемента, а выход - ко второму входу второго сумматора.
Использование дополнительных блоков и принятый закон управления подводным аппаратом создает режим оптимального потребления электроэнергии системой с сохранением требуемой точности.
Текст
(51) 05 1/04 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ глубины, подключенные соответственно к первому и второму входам сумматора,реальный интегрирующий элемент и усилитель мощности,вход которого соединен с выходом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу первого сумматора, вход которого соединен с первым входом второго сумматора, выход которого подключен к первому входу блоку идентификации,второй вход которого соединен с выходом усилителя мощности, а выход - с вспомогательными входами реального интегрирующего элемента и электронной модели подводного аппарата, вход которой через электронную модель исполнительного механизма подключен к входу реального интегрирующего элемента, а выход - ко второму входу второго сумматора. Использование дополнительных блоков и принятый закон управления подводным аппаратом создает режим оптимального потребления электроэнергии системой с сохранением требуемой точности.(76) Ивель Виктор Петрович Герасимова Юлия Викторовна(56) Инновационный патент РК 19951, кл. 05 1/04, 2008(54) АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНОГО АППАРАТА(57) Изобретение относится к области автоматического управления подвижными объектами, в частности, автономными обитаемыми и необитаемыми подводными аппаратами (ПА). Система управления глубиной погружения подводного аппарата содержит рулевой привод,состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, подводный аппарат, первый и второй сумматоры,электронные модели исполнительного механизма и подводного аппарата,блок идентификации, задатчик глубины и датчик 23588 Изобретение относится к области автоматического управления подвижными объектами, в частности, автономными обитаемыми и необитаемыми подводными аппаратами (ПА). Известна система иерархического управления движением подводного аппарата Патент СССР 2071108, кл. по МПК 05 1/00, 1996, принцип работы которой основан на использовании двух уровней в блоке управления с целью повышения качества управления ПА. Основной недостаток данной системы - относительно невысокая точность и большой расход электроэнергии при управлении глубиной погружения за счет отсутствия регулирования остаточной плавучестью ПА. Наиболее близким аналогом по совокупности признаков является система управления глубиной погружения подводного аппарата Инновационный патент РК 19951, кл. по МПК 05 1/04, 2008 г.,бюл. 8. Принцип работы данной системы основан на использовании дополнительных блоков,позволяющих повысить точность и экономичность системы в установившихся режимах. Основной недостаток данной системы - невозможность обеспечить оптимальный расход электроэнергии,поскольку в системе управления не учитывается нестационарность отдельных параметров ПА, как гидродинамического объекта. Задачей изобретения является разработка адаптивной системы управления глубиной погружения ПА, основанной на использовании дополнительных блоков,позволяющих оптимизировать расход электроэнергии системы в установившихся режимах. Решение поставленной задачи заключается в том, что в систему управления глубиной погружения подводного аппарата, содержащую рулевой привод, состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, сумматор, задатчик глубины и датчик глубины, подключенные соответственно к первому и второму входам сумматора, реальный интегрирующий элемент и усилитель мощности, вход которого соединен с выходом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, подключенного к третьему входу сумматора,введены электронные модели исполнительного механизма и подводного аппарата,второй сумматор и блок идентификации, выход которого подключен к вспомогательным входам реального интегрирующего элемента и электронной модели подводного аппарата, вход которой через электронную модель исполнительного механизма подключен к входу реального интегрирующего элемента, а выход - ко второму входу второго сумматора, первый вход которого соединен с датчиком глубины, а выход с первым входом блока идентификации, второй вход которого соединен с выходом усилителя мощности. Включение в состав системы второго сумматора,блока идентификации,электронной модели подводного аппарата и электронной модели 2 исполнительного механизма позволит обеспечить оптимальный расход электроэнергии системы управления ПА в режиме стабилизации ПА на заданной глубине. На чертеже представлена структурная схема системы управления глубиной погружения подводного аппарата. Система управления глубиной погружения подводного аппарата содержит рулевой привод 8,состоящий из последовательно соединенных электромеханического водяного насоса 6 и балластной камеры 7, подводный аппарат 9, первый 3 и второй 10 сумматоры, электронные модели исполнительного механизма 13 и подводного аппарата 12, блок идентификации 11, задатчик глубины 1 и датчик глубины 2, подключенные соответственно к первому и второму входам сумматора 3, реальный интегрирующий элемент 5 и усилитель мощности 4, вход которого соединен с выходом сумматора 3, а выход - с входом рулевого привода 8 и входом реального интегрирующего элемента 5, выход которого подключен к третьему входу первого сумматора 3, вход которого соединен с первым входом второго сумматора 10, выход которого подключен к первому входу блоку идентификации 11, второй вход которого соединен с выходом усилителя мощности 4, а выход - с вспомогательными входами реального интегрирующего элемента 5 и электронной модели подводного аппарата 12, вход которой через электронную модель исполнительного механизма 13 подключен к входу реального интегрирующего элемента 5, а выход - ко второму входу второго сумматора 10. Система управления работает следующим образом. Объектом управления является автономный подводный аппарат, глубина погружения которого может изменяться по закону, определяемому задатчиком глубины. Усилитель мощности 4 служит для включения электромеханического водяного насоса 6, который, откачивая или закачивая воду из внешней среды (водоема) в балластную камеру и изменяя тем самым остаточную плавучесть ПА,управляет глубиной погружения ПА. При стационарном обтекании корпуса ПА и небольшом диапазоне изменения скорости гидродинамику движения ПА можно представить следующим линеаризованным дифференциальным уравнением где М - масса аппарата с учетом присоединенных масс с - линеаризованный гидродинамический коэффициент, зависящий от формы аппарата и режима обтекания, который характеризуется числом Рейнольдса- остаточная плавучесть- глубина нахождения ПА. С помощью известных преобразований передаточную функцию ПА как объекта управления можно представить в следующем виде Параметры реального интегрирующего звена настраиваются таким образом,чтобы его передаточная функция была максимально приближена к передаточной функции ПА, т.е. имела вид где П - коэффициент пропорциональности. Тогда передаточную функцию усилителя мощности с реальным интегрирующим элементом в цепи обратной связи можно представить следующим выражением Таким образом, в идеальном варианте передаточная функция (5) описывает закон управления глубиной погружения ПА, а общая передаточная функция системы управления приближенно имеет вид пропорционального звена(8) здесь- сигнал рассогласования между выходами ПА и модели ПА. Компоненты градиента функционала(8) определяются по обычному правилу дифференцирования сложной функции Представим критерий следующем виде где ум - коэффициент усиления усилителя мощности. Если выбрать коэффициент ум 1, то выражение (4) можно упростить с помощью их электронных моделей и блока идентификации. Блок идентификации описывается уравнением/( ) ,(7) гдеявляется функционалом оптимизации и в данном случае принято Однако трудность качественного управления ПА заключается в том, что параметр с в формуле (5) заранее неизвестен, может зависеть от многих факторов, не может быть измерен и общем случае представляет собой нестационарную величину. Поэтому в данной системе предусмотрена автоматическая настройка параметра с в передаточной функции (3) по динамическим характеристикам исполнительного механизма и ПА здесь добавлен множитель 1/2 для удобства дальнейших преобразований, а черта символически обозначает операцию усреднения во времени. Уравнение (9) с учетом (10) примет вид Градиентный алгоритм настройки параметра с из условия достижения минимума функционаламожно представить в следующем скалярном виде Другими словами движение к оптимальному значениюпроизводится по градиенту в сторону его оптимального значения со скоростью,пропорциональной градиенту . Определяется сомножитель М ( р, с) ,с с с с где уПА - выходной сигнал текущей глубины нахождения ПА, уМПА - выходной сигнал модели ПА, М(р, с) - передаточная функция электронной модели исполнительного механизма и электронной модели ПА, х - сигнал на входе рулевого привода. оператор. Таким образом, определяя параметр с и используя его в алгоритме настройки передаточной функции реального интегрирующего элемента (3),можно с достаточной достоверностью добиться приближения передаточной функции системы управления к виду (6), что в свою очередь приведет к оптимизации потребления электроэнергии системой с сохранением требуемой точности. 23588 ФОРМУЛА ИЗОБРЕТЕНИЯ Система управления глубиной погружения подводного аппарата, содержащая рулевой привод,состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, сумматор, задатчик глубины и датчик глубины, подключенные соответственно к первому и второму входам сумматора, реальный интегрирующий элемент и усилитель мощности,вход которого соединен с выходом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента,подключенного к третьему входу сумматора, отличающаяся тем, что в нее введены электронные модели исполнительного механизма и подводного аппарата, второй сумматор и блок идентификации,выход которого подключен к вспомогательным входам реального интегрирующего элемента и электронной модели подводного аппарата, вход которой через электронную модель исполнительного механизма подключен ко входу реального интегрирующего элемента, а выход - ко второму входу второго сумматора, первый вход которого соединен с датчиком глубины, а выход с первым входом блока идентификации, второй вход которого соединен с выходом усилителя мощности.
МПК / Метки
МПК: G05D 1/04
Метки: система, адаптивная, аппарата, управления, подводного, погружения, глубиной
Код ссылки
<a href="https://kz.patents.su/4-ip23588-adaptivnaya-sistema-upravleniya-glubinojj-pogruzheniya-podvodnogo-apparata.html" rel="bookmark" title="База патентов Казахстана">Адаптивная система управления глубиной погружения подводного аппарата</a>
Система управления глубиной погружения подводного аппарата
Номер инновационного патента: 19951
Опубликовано: 15.08.2008
Авторы: Герасимова Юлия Викторовна, Торопов Анатолий Павлович, Ивель Виктор Петрович, Коровин Игорь Владимирович
МПК: G05D 1/04
Метки: глубиной, подводного, погружения, аппарата, система, управления
Формула / Реферат:
Изобретение относится к области автоматического управления подвижными объектами, в частности автономными обитаемыми и необитаемыми подводными аппаратами (ПА).Система управления глубиной погружения подводного аппарата содержит рулевой привод, состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, подводный аппарат, сумматор, задатчик глубины и датчик глубины, подключенные соответственно к первому и...
Многомерная адаптивная система управления положением объекта
Номер предварительного патента: 12040
Опубликовано: 16.09.2002
Авторы: Мутанов Галым Мутанович, Агапкин Геннадий Матвеевич, Торопов Анатолий Павлович, Серебриников Вадим Анатольевич, Ивель Виктор Петрович, Авдеев Владимир Николаевич
МПК: G05D 3/00
Метки: объекта, адаптивная, многомерная, управления, положением, система
Формула / Реферат:
Изобретение относится к системам управления приводом промышленного робота и может быть использовано для точной ориентации объектов манипулирования в рабочей зоне робота.Многомерная адаптивная система управления положением объекта содержит задатчик, сумматор, компаратор, последовательно соединенные релейный элемент, манипулятор, блок исполнительных органов и датчик, а также блок моделирования и блок форсирующих звеньев, вход которого подключен...
Адаптивная система управления приводом
Номер предварительного патента: 7672
Опубликовано: 15.06.1999
Авторы: Джолдасбеков Умирбек Арисланович, Кусаинов Бухар Кажикенович, Молдабеков Мейрбек Молдабекович
МПК: G05B 11/01
Метки: управления, система, приводом, адаптивная
Формула / Реферат:
Изобретение относится к области автоматического управления приводами и может быть использовано при создании систем автоматического управления приводами роботов-манипуляторов и других объектов управления, у которых нагрузка изменяется в широких пределах.Техническим результатом изобретения является упрощение измерения внешнего момента нагрузки и устранение ошибки положения привода.Это достигается тем, что адаптивная система управления приводом...
Электропривод постоянного тока
Номер предварительного патента: 10702
Опубликовано: 14.09.2001
Авторы: Мутанов Галым Мутанович, Ивель Виктор Петрович, Серебриников Вадим Анатольевич
МПК: H02P 5/06
Метки: тока, электропривод, постоянного
Формула / Реферат:
Изобретение относится к электротехнике и может быть использовано в высокоточных, быстродействующих автоматизированных электроприводах постоянного тока.Электропривод постоянного тока содержит электродвигатель с датчиком тока якоря, нелинейный элемент типа зоны нечувствительности, последовательно соединенные предварительный усилитель, сумматор, широтно-импульсный модулятор, усилитель мощности, выход которого подключен к электродвигателю,...
Автоматизированная система управления процессом термообработки железобетонных изделий
Номер предварительного патента: 6724
Опубликовано: 16.11.1998
Авторы: Филимонова Галина Васильевна, Голинка Александр Иванович, Беккерман Светлана Юрьевна
МПК: G05D 23/19
Метки: изделий, процессом, железобетонных, управления, автоматизированная, система, термообработки
Формула / Реферат:
Изобретение относится к автоматизированным системам управления технологическими процессами и может быть использовано при термовлажностной обработке железобетонных изделий.Технический результат - упрощение обработки данных большего количества датчиков, обеспечение сохранения и использования информации, полученной с датчиков, при отключениях сетевого питания и выдача информации в цифровом виде.Это достигается тем, что в автоматизированную систему...
Предыдущий патент: Способ прогнозирования приближения к нефтегазоносному горизонту
Следующий патент: Способ осуществления платежных операций пользователем мобильных устройств электронной связи и компьютерная система безналичного расчета для его осуществления
Случайный патент: Устройство для промывания костно-мозгового канала