Система управления глубиной погружения подводного аппарата
Номер инновационного патента: 19951
Опубликовано: 15.08.2008
Авторы: Ивель Виктор Петрович, Герасимова Юлия Викторовна, Торопов Анатолий Павлович, Коровин Игорь Владимирович
Формула / Реферат
Изобретение относится к области автоматического управления подвижными объектами, в частности автономными обитаемыми и необитаемыми подводными аппаратами (ПА).
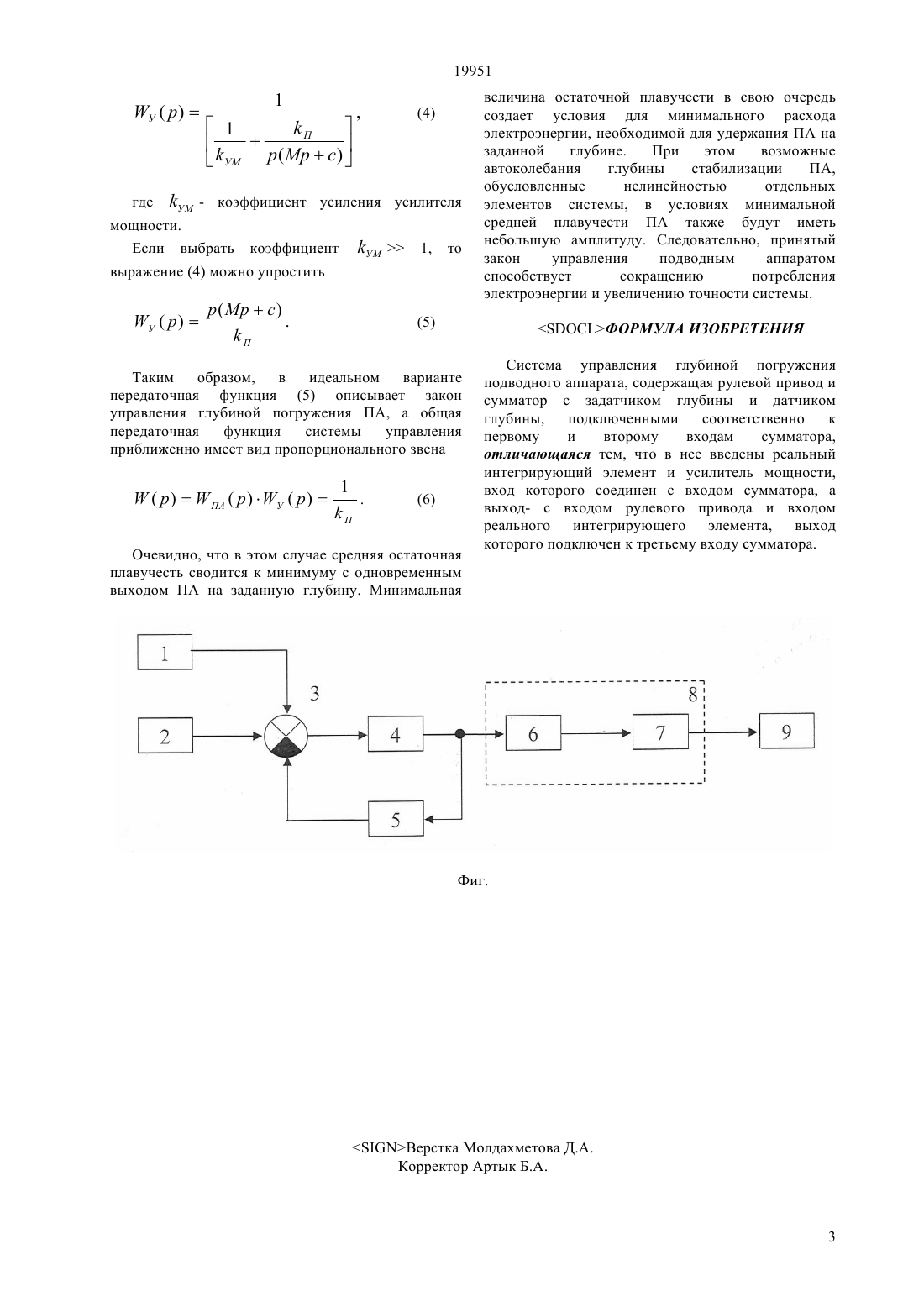
Система управления глубиной погружения подводного аппарата содержит рулевой привод, состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, подводный аппарат, сумматор, задатчик глубины и датчик глубины, подключенные соответственно к первому и второму входам сумматора, реальный интегрирующий элемент и усилитель мощности, вход которого соединен с входом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу сумматора.
Использование дополнительных блоков и принятый закон управления подводным аппаратом способствует сокращению потребления электроэнергии и увеличению точности системы.
Текст
(51) 05 1/04 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(73) Ивель Виктор Петрович , Коровин Игорь Владимирович , Торопов Анатолий Павлович(54) СИСТЕМА УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНОГО АППАРАТА(57) Изобретение относится к области автоматического управления подвижными объектами, в частности автономными обитаемыми и необитаемыми подводными аппаратами (ПА). Система управления глубиной погружения подводного аппарата содержит рулевой привод, состоящий из последовательно соединенных электромеханического водяного насоса и балластной камеры, подводный аппарат, сумматор,задатчик глубины и датчик глубины, подключенные соответственно к первому и второму входам сумматора, реальный интегрирующий элемент и усилитель мощности, вход которого соединен с входом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу сумматора. Использование дополнительных блоков и принятый закон управления подводным аппаратом способствует сокращению потребления электроэнергии и увеличению точности системы. 19951 Изобретение относится к области автоматического управления подвижными объектами, в частности автономными обитаемыми и необитаемыми подводными аппаратами (ПА). Известна система автоматического управления движением подводного аппаратасб. трудов Совета изд. ИПУ РАН. - М, 1993., содержащая датчики дифферента и угловой скорости, датчик угла поворота руля (двигателя), сумматорусилитель, на входе которого алгебраически суммируются все сигналы с перечисленных выше датчиков. С задатчика угла дифферента на вход сумматора-усилителя поступает заданное значение угла дифферента. Недостатком этой системы является колебательность ПА в процессе перехода на заданный режим. Наиболее близким аналогом по совокупности признаков является система иерархического управления движением подводного аппарата(Патент 2071108, МПК 051/00, 1996 г.) Принцип работы данной системы основан на использовании двух уровней в блоке управления с целью повышения качества управления ПА. Основной недостаток данной системы относительно невысокая точность и большой расход электроэнергии при управлении глубиной погружения за счет отсутствия регулирования остаточной плавучестью ПА. Задачей изобретения является разработка системы управления глубиной погружения подводного аппарата, основанной на использовании дополнительных блоков, позволяющих повысить точность и экономичность системы в установившихся режимах. Решение поставленной задачи заключается в том, что в систему управления глубиной погружения подводного аппарата, содержащую рулевой привод и сумматор с задатчиком глубины и датчиком глубины, подключенными соответственно к первому и второму входам сумматора, введены реальный интегрирующий элемент и усилитель мощности, вход которого соединен с входом сумматора, а выход - с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу сумматора. Включение в состав системы усилителя мощности, охваченного обратной отрицательной связью, и использование в качестве элемента обратной связи реального интегратора позволит повысить точность установки ПА на заданную глубину и уменьшит энергопотребление системы в установившимся режиме за счет сведения к минимуму средней остаточной плавучести ПА. На чертеже представлена структурная схема системы управления глубиной погружения подводного аппарата. Система управления глубиной погружения подводного аппарата содержит рулевой привод 8,состоящий из последовательно соединенных электромеханического водяного насоса 6 и балластной камеры 7, подводный аппарат 9,сумматор 3, задатчик глубины 1 и датчик глубины 2,2 подключенные соответственно к первому и второму входам сумматора 3, реальный интегрирующий элемент 5 и усилитель мощности 4, вход которого соединен с входом сумматора 3, а выход - с входом рулевого привода 8 и входом реального интегрирующего элемента 5, выход которого подключен к третьему входу сумматора 3. Система управления работает следующим образом. Объектом управления является автономный подводный аппарат, глубина погружения которого может изменяться по закону, определяемому задатчиком глубины. Усилитель мощности 4 служит для включения электромеханического водяного насоса 6, который, откачивая или закачивая воду из внешней среды (водоема) в балластную камеру и изменяя тем самым остаточную плавучесть ПА,управляет глубиной погружения ПА. При стационарном обтекании корпуса ПА и небольшом диапазоне изменения скорости гидродинамику движения ПА можно представить следующим линеаризованным дифференциальным уравнением где М- масса аппарата с учетом присоединенных масс с - линеаризованный гидродинамический коэффициент, зависящий от формы аппарата и режима обтекания, который характеризуется числом Рейнольдса- остаточная плавучестьглубина нахождения ПА. С помощью известных преобразований передаточную функцию ПА,как объекта управления, можно представить в следующем виде Параметры реального интегрирующего звена настраиваются таким образом,чтобы его передаточная функция была максимально приближена к передаточной функции ПА т.е. имела вид гдеП - коэффициент пропорциональности. Тогда передаточную функцию усилителя мощности с реальным интегрирующим элементом в цепи обратной связи можно представить следующим выражением Таким образом, в идеальном варианте передаточная функция (5) описывает закон управления глубиной погружения ПА, а общая передаточная функция системы управления приближенно имеет вид пропорционального звена величина остаточной плавучести в свою очередь создает условия для минимального расхода электроэнергии, необходимой для удержания ПА на заданной глубине. При этом возможные автоколебания глубины стабилизации ПА,обусловленные нелинейностью отдельных элементов системы, в условиях минимальной средней плавучести ПА также будут иметь небольшую амплитуду. Следовательно, принятый закон управления подводным аппаратом способствует сокращению потребления электроэнергии и увеличению точности системы. Очевидно, что в этом случае средняя остаточная плавучесть сводится к минимуму с одновременным выходом ПА на заданную глубину. Минимальная Система управления глубиной погружения подводного аппарата, содержащая рулевой привод и сумматор с задатчиком глубины и датчиком глубины,подключенными соответственно к первому и второму входам сумматора,отличающаяся тем, что в нее введены реальный интегрирующий элемент и усилитель мощности,вход которого соединен с входом сумматора, а выход- с входом рулевого привода и входом реального интегрирующего элемента, выход которого подключен к третьему входу сумматора.
МПК / Метки
МПК: G05D 1/04
Метки: погружения, подводного, аппарата, управления, глубиной, система
Код ссылки
<a href="https://kz.patents.su/3-ip19951-sistema-upravleniya-glubinojj-pogruzheniya-podvodnogo-apparata.html" rel="bookmark" title="База патентов Казахстана">Система управления глубиной погружения подводного аппарата</a>
Предыдущий патент: Способ определения параметров изоляции в сети с изолированной нейтралью напряжением до 1000 В при повреждении изоляции одной из фаз
Следующий патент: Водорастворимый термочувствительный сополимер гидроксиэтилакрилата и бутилакрилата с эмульгирующими свойствами
Случайный патент: Способ оценки трансплантации фетальных гепатоцитов