Локальная система дифференциальной коррекции
Номер полезной модели: 837
Опубликовано: 15.08.2012
Авторы: Молдабеков Мейрбек, Ахмедов Даулет Шафигуллович, Шабельников Евгений Алексеевич
Формула / Реферат
Р Е ФЕPAT
Полезная модель относится к конструктивному выполнению средств определения местоположения подвижного объекта с помощью сетевых спутниковых радионавигационных систем (СРНС) типа «НЛВСТЛР» и «ГДОНАСС», и может быть использована для коррекции радионавигационных параметров путем передачи корректирующей информации.
Технический результат, получаемый при использовании полезной модели, заключается в существенном повышении функциональности, точности определения координат и надёжности системы, при упрощении её конструкции. При этом базовая станция системы передает потребителю не только дифференциальные поправки к измеренным величинам, как и известные системы, но и сами измеренные величины, включая фазу несущего сигнала, что повышает гибкость системы.
Предложена система дифференциальной коррекции, включающая орбитальные группировки навигационных космических аппаратов IIKA1 и НКА2, мобильный приемник потребителя (Mill I) и базовую станцию (БС).
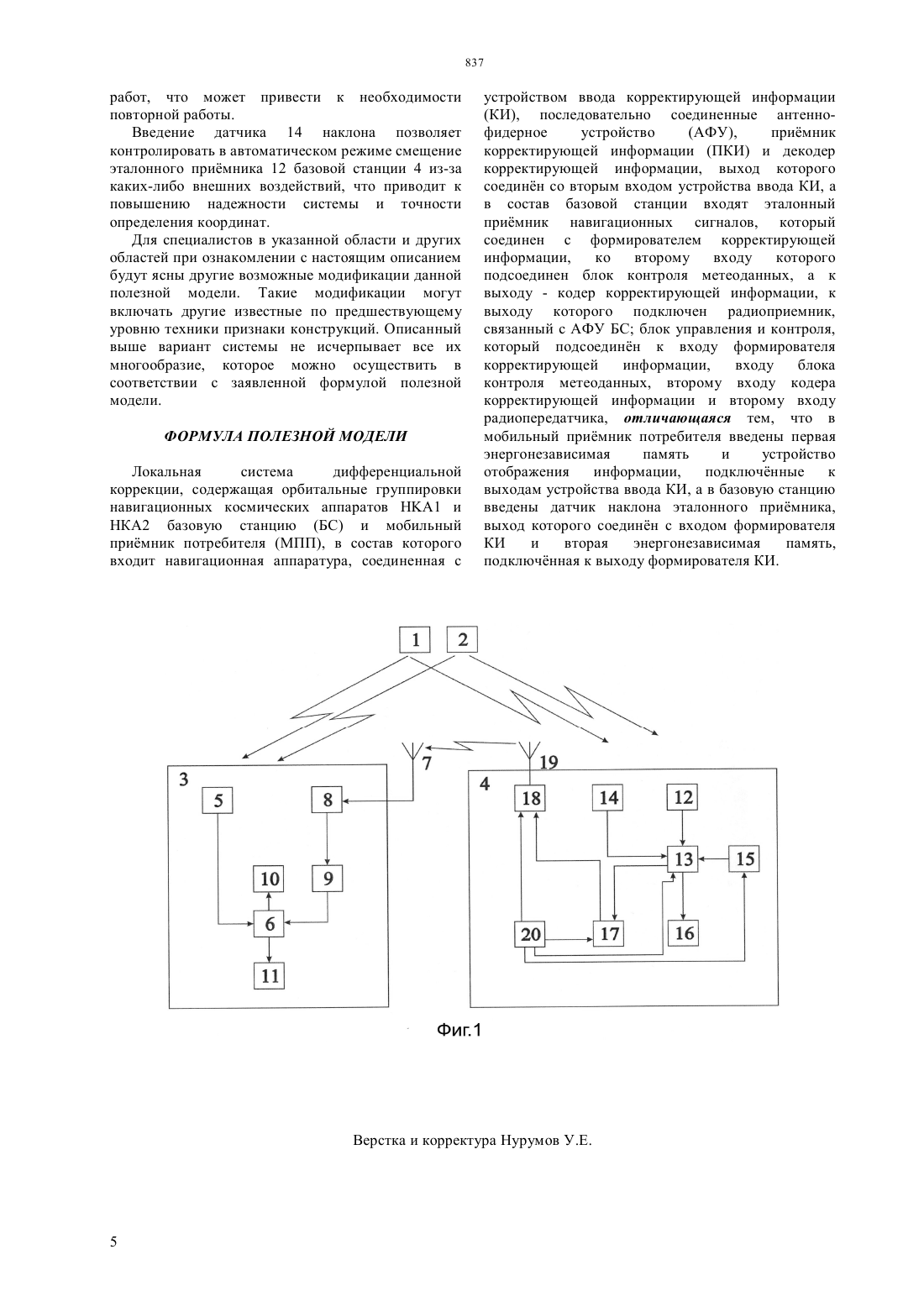
В состав МПП входит навигационная аппаратура, соединённая с устройством ввода КИ, последовательно соединённые АФУ, приёмник корректирующей информации (ПКИ), декодер корректирующей информации, выход которого соединён со вторым входом устройства ввода КИ, выходы которого подключены к первой энергонезависимой памяти и устройству отображения информации.
В состав БС входят эталонный приёмник навигационных сигналов, который соединен с формирователем корректирующей информации, ко второму входу которого подсоединен блок контроля метеоданных, к третьему - датчик наклона эталонного приёмника, к выходу - кодер корректирующей информации, к выходу которого подключен радиоприемник, связанный с АФУ БС, а также блок управления и контроля, который подсоединён к четвертому входу формирователя корректирующей информации, входу блока контроля метеоданных, второму входу кодера корректирующей информации и первому входу радиопередатчика, второй вход которого подключен к кодеру КИ.
Текст
(51) 01 5/14 (2011.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ измеренные величины, включая фазу несущего сигнала, что повышает гибкость системы. Предложена система дифференциальной коррекции, включающая орбитальные группировки навигационных космических аппаратов 1 и 2, мобильный приемник потребителя (МПП) и базовую станцию (БС). В состав МПП входит навигационная аппаратура, соединнная с устройством ввода КИ,последовательно соединнные АФУ, примник корректирующей информации (ПКИ), декодер корректирующей информации, выход которого соединн со вторым входом устройства ввода КИ,выходы которого подключены к первой энергонезависимой памяти и устройству отображения информации. В состав БС входят эталонный примник навигационных сигналов, который соединен с формирователем корректирующей информации, ко второму входу которого подсоединен блок контроля метеоданных, к третьему - датчик наклона эталонного примника, к выходу - кодер корректирующей информации, к выходу которого подключен радиоприемник, связанный с АФУ БС, а также блок управления и контроля, который подсоединн к четвертому входу формирователя корректирующей информации,входу блока контроля метеоданных, второму входу кодера корректирующей информации и первому входу радиопередатчика, второй вход которого подключен к кодеру КИ.(72) Ахмедов Даулет Шафигуллович Шабельников Евгений Алексеевич Молдабеков Мейрбек(73) Дочернее Товарищество с ограниченной ответственностью Институт космической техники и технологий Товарищество с ограниченной ответственностью(54) ЛОКАЛЬНАЯ СИСТЕМА ДИФФЕРЕНЦИАЛЬНОЙ КОРРЕКЦИИ(57) Полезная модель относится к конструктивному выполнению средств определения местоположения подвижного объекта с помощью сетевых спутниковых радионавигационных систем (СРНС) типа НАВСТАР и ГЛОНАСС, и может быть использована для коррекции радионавигационных параметров путем передачи корректирующей информации. Технический результат, получаемый при использовании полезной модели, заключается в существенном повышении функциональности,точности определения координат и наджности системы, при упрощении е конструкции. При этом базовая станция системы передает потребителю не только дифференциальные поправки к измеренным величинам, как и известные системы, но и сами Полезная модель относится к конструктивному выполнению средств определения местоположения подвижного объекта с помощью спутниковых радионавигационных систем(СРНС) типа НАВСТАР и ГЛОНАСС, и может быть использована для коррекции радионавигационных параметров путем передачи корректирующей информации. Из уровня техники известна система определения местоположения объекта в сети дифференциальных станций спутниковой радионавигационной системы (Патент ,12863,кл. 01 1/02, 01 5/02, 2000). Система содержит навигационные спутники (НС), сеть изконтрольных наземных пунктов в виде дифференциальных станций (ДС) и размещенный на объекте приемоиндикатор (ПИ) в виде примника СРНС, при этом каждая изстанций сети ДС включает последовательно соединенные приемную антенну сигналов СРНС, блок формирования и передачи дифференциальных поправок (ДП) и передающую ДП антенну, ПИ СРНС включает последовательно соединнные приемную антенну сигналов СРНС и ДП, приемное устройство и блок вычисления местоположения объекта, причем одна станцияиз сети ДС выполнена в виде главной станции сети ДС и содержит последовательно соединнные приемную антенну сигналов СРНС и сигналов ДП,блок формирования ДП,формирователь кадра передаваемых ДП, передатчик ДП и передающую ДП антенну, а также блок регрессивного анализа (РА) некомпенсированных поправок, вход которого подключн ко второму выходу блока формирования ДП, а выход - к второму входу формирователя кадра передаваемых ДП, размещенный на объекте ПИ СРНС дополнительно включает блок восстановления некомпенсированных поправок (ВНП), вход которого подключн к второму выходу приемного устройства, а выход - к второму входу блока вычисления местоположения, при этом в качестве блока РА и блока ВНП использованы стандартные блоки, входящие в состав компьютерной системы,или персональный компьютер, а в качестве главной станции М использована любая из ДС, или несколько ДС, или каждая станция из сети ДС. Система используется для высокоточного определения координат и по зиционирования подвижных наземных и воздушных судов, в геодезии и других хозяйственных областях. Недостаток известной системы заключается в том, что в ней отсутствует блок хранения полученной информации для последующей прецизионной обработки данных. Дифференциальные станции известной системы имеют две различные конструкции, что ведет к усложнению системы. Известно также устройство формирования навигационных поправок (Патент 2138060,кл. 01 3/10, 01 21/24, 1999), в которое входят последовательно соединенные аппаратуру потребителя,вычислитель поправок,модулятор,передатчик, вычислитель параметра, подключенный 2 выходами ко второму входу вычислителя поправок,а также блок запоминания,включнный последовательно между вычислителем поправок и модулятором, и блок редукции,входов которого связаны свыходами (со 2-го по (1)-й) блока запоминания,входов которого (со 2-го по (1)й) подключены к выходам блока редукции. При этом блок редукции содержит последовательно соединнные первый блок сложения, первый блок деления, второй блок сложения, первый блок вычитания, второй блок деления, третий блок сложения, третий блок деления, четвертый блок сложения, второй блок вычитания, четвертый блок деления, выход которого соединн свходами блока запоминания черезоднотипных - цепей,каждая из которых содержит последовательно соединнные четвертый перемножитель и второй сумматор, выход третьего блока деления связан свходами четвертого блока сложения черезоднотипных - цепей, каждая из которых содержит последовательно соединнные второй вычитатель и третий перемножитель, выход второго блока деления соединн свходами третьего блока сложения также черезоднотипных- цепей, каждая из которых содержит последовательно соединнные второй перемножитель и первый сумматор, а выход первого блока деления связан свходами второго блока сложения черезоднотипных - цепей, каждая из которых содержит последовательно соединнные первый вычитатель и первый перемножитель, причемвходов первого блока сложения, являющиеся входами блока редукции, соединены соответственно свторыми входами - первых и вторых вычитателей,выходов которых соединены свторыми входами первых и третьих перемножителей -й ветви и свторыми входами вторых и четвертых перемножителей также -й ветви соответственно,- выходов первого блока деления соединены свторыми входами первых сумматоров -й цепочки,выходов которых соединены свходами третьего блока сложения,- выходов третьего блока деления соединены свторыми входами вторых сумматоров -й ветви,выходов которых соединены свходами блока запоминания и являются выходами блока редукции,выходы второго и четвертого блоков сложения соединены со вторыми входами второго и четвертого соответственно блоков деления, а на вторые входы первого и второго блоков вычитания подается сигнал постоянного уровня, равный ( 3)2, где- количество поправок, а 2 - дисперсия случайной погрешности поправки. Устройство используется в радиотехнических системах навигации, например, на контрольных станциях, реализующих дифференциальный метод навигации. Однако это устройство передаст только дифференциальные поправки измеренных величин,тем самым ограничивает возможности потребителя но применению собственных алгоритмов и отсутствует блок хранения полученной информации для последующей прецизионной обработки данных. Наиболее близким аналогом к заявляемому изобретению по совокупности признаков является спутниковая радионавигационная система определения местоположения объекта (Патент 2152050, кл. 01 5/14, 01 5/02, 2000),включающая две орбитальные группировки навигационных космических аппаратов (НКА),аппаратуру(ОПП) устройство, устройство интегрального контроля (ИК) и регистратор данных. При этом в состав аппаратуры потребителя,входят навигационная аппаратура,антенно-фидерное устройство (АФУ), примник корректирующих дифференциальных поправок (КДП), декодер КДП,устройство ввода ДП. В состав опорного приемопередающего устройства (ОПП) входят АФУ,эталонный примник навигационных сигналов (НС),формирователь ДП, блок контроля метеорологических данных (МД), кодер ДП, блок управления и контроля, коммутатор, радиомаяк а в состав устройства интегрального контроля (ИК) входят первое АФУ, примник ДП, второе АФУ,контрольный примник НС, блок обработки навигационных параметров (НП), коммутатор, блок контроля точности ДП, блок контроля целостности данных (ЦД), блок управления, имитатор сигналов НКА, блок контроля имитационных параметров(ИП), интерфейс внешних связей. Данная система позволяет обеспечить непрерывный мониторинг навигационных полей ГЛОНАСС и , формировать информацию о целостности навигационных данных спутниковой радионавигационной системы ГЛОНАСС и ,повысить достоверность местоопределения объекта за счет использования избыточного количества навигационных космических аппаратов. К недостаткам этой системы относится то, что она, как и известные системы, передает только дифференциальные поправки измеренных величин,что не обеспечивает возможности использования собственных алгоритмов при высокоточном определении местоположения, кроме того, в конструкцию прототипа введено устройство интегрального контроля, что ведет к усложнению системы. Технической задачей настоящей полезной модели является создание локальной системы,которая могла бы преодолеть указанные выше недостатки существующих известных систем, и обеспечить непрерывный мониторинг навигационных полей ГЛОНАСС и , формировать информацию о целостности навигационных данных спутниковой радионавигационной системы ГЛОНАСС и,повысить точность местоопределения различных объектов и повысить гибкость системы за счет использования полной информации, принятой базовой станцией и мобильным примником, а также за счет использования фазы несущей навигационного сигнала. Технический результат, получаемый при использовании полезной модели, заключается в существенном повышении функциональности,точности определения координат и наджности системы, при упрощении е конструкции. При этом базовая станция сие темы передает потреби гелю не только дифференциальные поправки к измеренным величинам, как и известные системы, но и сами измеренные величины, включая фазу несущего сигнала, что повышает гибкость системы. Технический результат, достигается тем, что в спутниковую радионавигационную систему,включающую орбитальные группировки навигационных космических аппаратов НКА 1 и НКА 2, мобильный примник потребителя, в состав которого входит навигационная аппаратура,антенно-фидерное устройство (АФУ), примник корректирующей информации (ПКИ), декодер (Д) корректирующей информации (КИ), контроллер, в качестве которого использовано устройство ввода КИ, по крайней мере, одно опорное приемопередающее устройство, в качестве которого использована базовая станция (БС), в состав которой входят АФУ, эталонный примник навигационных сигналов (ЭП НС), формирователь КИ, блок контроля метеорологических данных(МД), кодер КИ, блок управления и контроля,радиомаяк, в качестве которого использован радиопередатчик, согласно предлагаемой полезной модели в мобильный прием-пик потребителя дополнительно введены устройство отображения информации и первая энергонезависимая намять(ЭНП 1). Кроме того, для достижения указанного результата в базовую станцию дополнительно введены вторая энергонезависимая память (ЭНП 2) и датчик наклона навигационной аппаратуры. Для лучшего понимания сущность предлагаемой полезной модели далее поясняется с привлечением графических материалов. На чертеже приведена структурная схема предлагаемой полезной модели. Согласно предлагаемой полезной модели локальная система дифференциальной коррекции(фиг. 1) включает орбитальные группировки навигационных космических аппаратов НКА 1 1 и НК 2 2 мобильный примник потребителя (МПП) 3 и базовую станцию (БС) 4. Мобильный примник потребителя (МПП) 3 включает в себя навигационную аппаратуру 5,соединнную с устройством 6 ввода КИ,последовательно соединнные АФУ 7, примник 8 корректирующей информации (ПКИ), декодер 9 корректирующей информации, выход которого соединн со вторым входом устройства 6 ввода КИ,выходы которого подключены к первой энергонезависимой памяти 10 и устройству 11 отображения информации. Навигационная аппаратура 5 в контексте данной полезной модели это аппаратура, решающая задачу получения сырых данных в штатном режиме (что было определено выше) и представляющая собой структурно канал приема навигационного сигнала НКА. Сигнал с корректирующей информацией принимается АФУ 7 и далее обрабатывается примником 8 КИ. Примник 8 КИ передает полученное сообщение на декодер 9 КИ, где осуществляется обработка полученного сообщения к виду, удобному для решения дифференциальной задачи. Устройство 6 ввода КИ является устройством согласования, которое может иметь различное исполнение и конфигурацию в зависимости от исполнения навигационной аппаратуры 5. В состав БС 4 входит эталонный примник навигационных сигналов 12, который соединен с формирователем 13 корректирующей информации,к другому входу, которого подключн датчик 14 наклона эталонного примника, а блок 15 контроля метеоданных подсоединн к третьему входу формирователя 13 корректирующей информации,выходы которого параллельно соединены со второй энергонезависимой памятью 16 и кодером 17 корректирующей информации, выход которого подключн к радиопередатчику 18, связанному с антенно-фидерным устройством 19, при этом блок 20 управления и контроля параллельно подключн к входу формирователя 13 корректирующей информации, блоку 15 контроля метеоданных,второму входу кодера 17 корректирующей информации и второму входу радиопередатчика 18. Базовая станция 4 определяет собственные навигационные параметры и передает через радиопередатчик 18 в эфир информацию для дифференциальной коррекции данных мобильного примника потребителя 4. Аппаратура базовой станции функционально подразделяется на составные части, основное назначение которых указано ниже. Навигационный сигнал принимается эталонным примником НС 12 базовой станции 4, где происходит извлечение навигационной информации, заложенной в сигнале. Затем навигационные параметры о навигационных космических аппаратах в цифровой форме транслируются в формирователь КИ 13, где происходит формирование пакета данных с корректирующей информацией. Блок 15 контроля метеоданных измеряет параметры внешней окружающей среды(температуру, давление, скорость и направление ветра, влажность) и, обрабатывая их по специальной методике, вводит в формирователь КИ 13 дополнительную тропосферную поправку. Корректирующая информация транслируются в кодер 17 КИ, который преобразует полученную информацию к виду, удобному для передачи радиопередатчиком 18. Блок 20 управления и контроля, входящий в состав БС 4, выполняет функции контроля и управления за режимами работы е функциональных блоков, а именно АФУ 19,эталонного примника НС 12, кодера КИ 17, блока 15 контроля метеоданных и формирователя 13 корректирующей информации в части проверки их работоспособности. 4 Предлагаемая локальная система дифференциальной коррекции работает следующим образом. Орбитальные группировки НКА 1 1 и НКА 2 2 непрерывно излучают в направлении Земли навигационные сигналы, одновременно принимаемые навигационной аппаратурой 5 и эталонным примником 12 мобильного примника потребителя 3 и базовой станции 4 соответственно. По принятому навигационному сигналу навигационная аппаратура 5 и эталонный приемник 12 производят вычисление сырых навигационных данных. На базовой станции 4 от эталонного примника 12 сырые навигационные данные поступают в формирователь КИ 13, в который также поступает информация от датчика 14 наклона и блока 15 контроля метеоданных. Вся информация,поступившая в формирователь 13 КИ,обрабатывается в нем, и на ее основе формируется пакет данных, который поступает в кодер 17 КИ, где происходит его кодирование и через радиопередатчик 18 по средствам АФУ 19 по радиоканалу передается на мобильный примник потребителя (МПП) 4, где пакет данных с помощью АФУ 7 принимается примником 8 корректирующей информации с последующей его передачей в декодер 9 КИ, где происходит декодирование пакета данных,после чего декодированная корректирующая информация,поступает в устройство 6 ввода КИ. Работой базовой станции 4, управляет блок 20 управления и контроля, по управляющим сигналам которого происходит включение или отключение основных блоков базовой станции 4. Вся корректирующая информация производимая БС 3 сохраняется в ЭНП 2 16. В мобильном приемнике потребителя 3 на второй вход устройства 6 ввода КИ от навигационной аппаратуры 5 также поступают сырые навигационные данные, и в устройстве 6 ввода КИ производится математическая обработка поступившей информации, в результате которой определяется местоположение МПП 4 с высокой точностью. Результаты обработки и исходные данные сохраняются в ЭНП 1 10 и визуализируются в устройстве 11 отображения информации. Сравнительный анализ с ближайшим аналогом показал, что заявленное техническое решение отличается от известной системы более высокими точностными характеристиками,большей надежностью определения высокоточного местоположения и высокой гибкостью системы Эксперименты показали, что введение в систему ЭНП 1 10 и ЭНП 2 16 позволяет обеспечить проведение послесеансной прецизионной обработки информации, а введение устройства отображения информации 11 позволяет визуально определить сбои в работе системы непосредственно во время проведения работ, что повышает удобство работы с системой, в то время как при отсутствии данного элементов это возможно только после проведения работ, что может привести к необходимости повторной работы. Введение датчика 14 наклона позволяет контролировать в автоматическом режиме смещение эталонного примника 12 базовой станции 4 из-за каких-либо внешних воздействий, что приводит к повышению надежности системы и точности определения координат. Для специалистов в указанной области и других областей при ознакомлении с настоящим описанием будут ясны другие возможные модификации данной полезной модели. Такие модификации могут включать другие известные по предшествующему уровню техники признаки конструкций. Описанный выше вариант системы не исчерпывает все их многообразие, которое можно осуществить в соответствии с заявленной формулой полезной модели. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ Локальная система дифференциальной коррекции, содержащая орбитальные группировки навигационных космических аппаратов Н 1 и НКА 2 базовую станцию (БС) и мобильный примник потребителя (МПП), в состав которого входит навигационная аппаратура, соединенная с устройством ввода корректирующей информации(КИ), последовательно соединенные антеннофидерное устройство(АФУ),примник корректирующей информации (ПКИ) и декодер корректирующей информации, выход которого соединн со вторым входом устройства ввода КИ, а в состав базовой станции входят эталонный примник навигационных сигналов, который соединен с формирователем корректирующей информации,ко второму входу которого подсоединен блок контроля метеоданных, а к выходу - кодер корректирующей информации, к выходу которого подключен радиоприемник,связанный с АФУ БС блок управления и контроля,который подсоединн к входу формирователя корректирующей информации,входу блока контроля метеоданных, второму входу кодера корректирующей информации и второму входу радиопередатчика, отличающаяся тем, что в мобильный примник потребителя введены первая энергонезависимая память и устройство отображения информации,подключнные к выходам устройства ввода КИ, а в базовую станцию введены датчик наклона эталонного примника,выход которого соединн с входом формирователя КИ и вторая энергонезависимая память,подключнная к выходу формирователя КИ.
МПК / Метки
МПК: G01S 5/14
Метки: система, локальная, дифференциальной, коррекции
Код ссылки
<a href="https://kz.patents.su/5-u837-lokalnaya-sistema-differencialnojj-korrekcii.html" rel="bookmark" title="База патентов Казахстана">Локальная система дифференциальной коррекции</a>
Предыдущий патент: Устройство для определения качества моторного масла
Следующий патент: Устройство для обучения азбуке
Случайный патент: Маятниковый датчик уровня