Тяговое устройство
Номер патента: 3577
Опубликовано: 10.06.1996
Формула / Реферат
Изобретение относится к области силовых приводов гибких тяговых элементов и может быть использовано при выполнении транспортных и монтажных операций в промышленности и строительстве, особенно эффективно использование устройства в горнодобывающем производстве.
Тяговое устройство содержит круглозвенную цепь и пару гидроцилиндров, штоки которых связаны балкой с установленными на ней захватами, устройство снабжено дополнительной парой гидроцилиндров, штоки которых связаны посредством балки с дополнительными захватами, гидроцилиндры снабжены общим корпусом и попарно закреплены во взаимно перпендикулярных плоскостях со смешением относительно друг друга на расстояние не менее длины хода поршня и установлены штоки навстречу друг другу, балки связаны со штоками посредством шарниров, силовая полость каждого гидроцилиндра связана с источником высокого давления посредством каналов, выполненных в штоке и корпусе соответствующего шарнира с возможностью смешения друг относительно друга шарнирного и штокового участков каналов, причем цепь размещена между гидроцилиндрами по оси устройства, каждое из звеньев цепи установлено с возможностью взаимодействия с парами направляющих ручьев, которыми оснащено устройство, расположенных вдоль цепи во взаимно перпендикулярных плоскостях, захваты выполнены в виде упругоподжатых к цепи и помещенных в опорные гнезда собачек, причем собачки одного из захватов в каждой паре расположены на внешней, а другой - на внутренней стороне соответствующих балок, при этом устройство снабжено жестко связанными между собой пластинами, одна из которых размещена между парами гидроцилиндров, а другие - по концам устройства, а торцы гидроцилиндров оснащены шаровыми сегментами, установленными в опорных гнездах, выполненных в пластинах, причем шаровая поверхность опорных гнезд имеет диаметр, равный расстоянию между ними.
Изобретение обеспечивает надежность работы устройства.
Текст
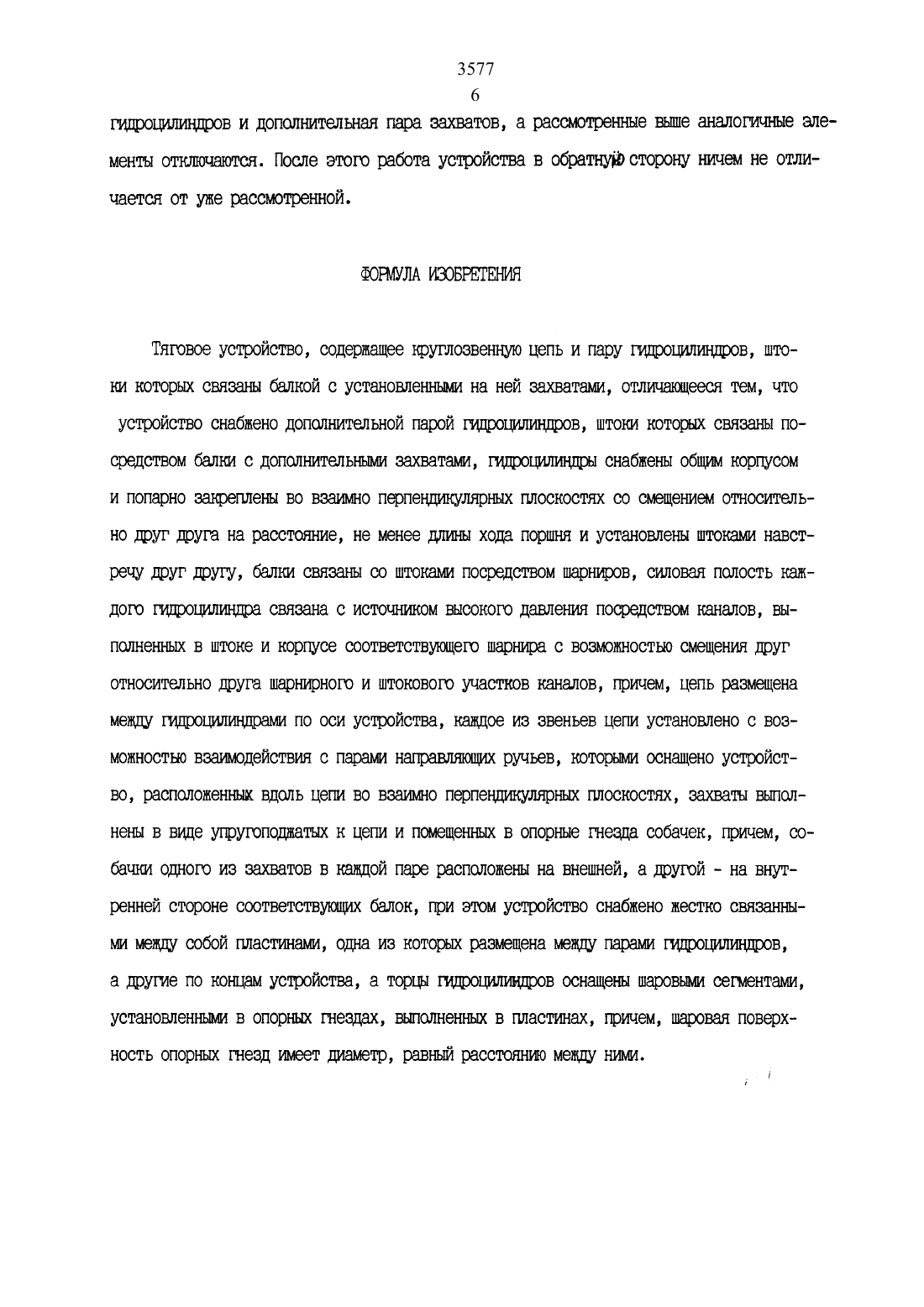
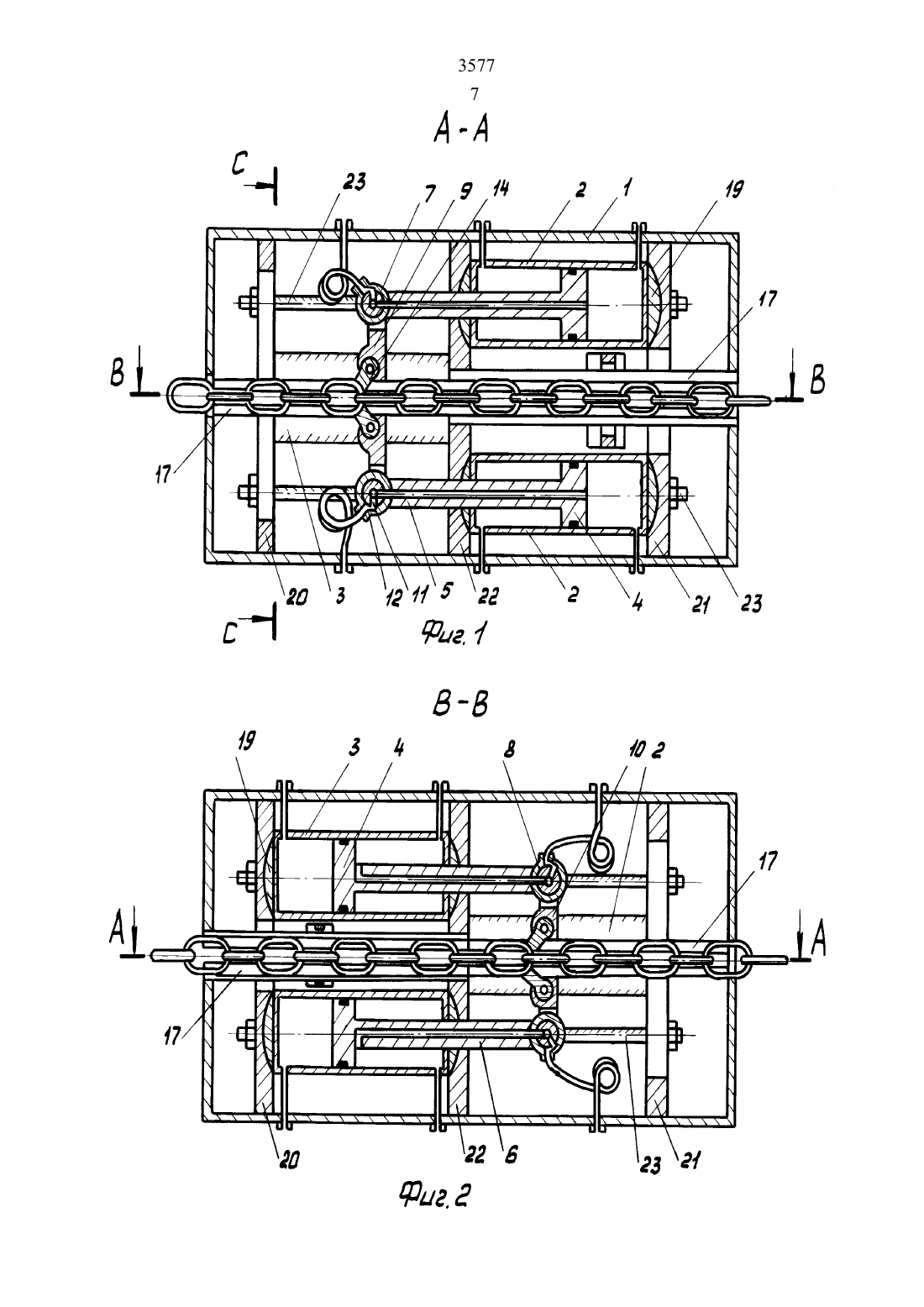
Изобретение относится к области силовых приводов гибких тяговых элементов и может быть использовано при выполнении транспортных и монталньш операций в промылленности и строительстве. Особенно зфректтлвно использование устройства в горнодобывающем производстве, где стесненные условия и значительный вес перемещаемых грузов требуют ш/лпшлальных габаритов и большой моли-гости тяговых устройств.Известно устройство для передвижения горн-пых механизмов, вюлочахощее балки, таежду которыми расположены домкраты и цепи, одним концом закрепленные к упору /авторское свидетельство СССР М 457806, кл. Е 21 Р 13/08, 1974 г./.Данное устройство не обеспечивает удержания горных механизмов при работе по падении).Известно устройство для перемещения горных механизмов, содержащее натянутую вдоль пути транспортирования и закрепленную концами цепь, два гидроцилиндра с балками, связывающими их корпуса и штоки, захваты, установленные на балках с возможностью взаимодействия с цепью /авторское свидетельство СССР М 962658, кл. Е 21 Р 13/08, 1978 г./.Это устройство при перемещении грузов должно само перемещаться по, предварительнсн натянутой и закрепленной коъщаъш, цепи. вслецствии чего ограничивается область его применения, так как перемещение груза относительно неподвижной цепи требует либо проклашш протяженньш коммуншсагмй, либо перемещения вместе с устройством источника высокого давления /маслостаъллги/. При погытке расположить устройство стационарно и перемещать, связанную с грузом, цепь в рассматриваем конструкциях будут происходить деформации холостой ветви цепи между захватами тровисантде, собирание в гармошку/Ч, что создает препятствия для устойчивой работы устройства. Пошамо этого, здесь перемещение грузов может осуществляться лишь циклично /прерывисто/, что снижает скорость транспортирования. Используете в устройстве захваты цепи требуют для своего срабатывания ручных операцигй, что увеличивает трудоемкость. Все эти недостатки существенно снижают зксгшуатацллонньхе возможности рассматриваемого устройства.Технический результат, затилочаъотцулйся в повышении надежности и эксплуатацион НОЙ ВОЗМОЖНОСТИ УСТРОЙСТВЭ, обеспечивается тем, ЧТО ТЯГОВОЭ УСТРОЙСТВО, оодержакцееБФУГЛОЗБЭННУЮ ЦЕПЬ И пару ГИПДОШЛШХИЦПХЭОВ, ШТОЕИ КОТОБЫХ СВЯЗЗНЫ ОЗЛКОЙ С УСТЭНОВПЭН 3577 3 ньш на ней захватами, согласно изобретение снабжено дополнительной парой пищроцхл линдров штоки которыи связан посредством балки с дополнительнни захватами, гидроцилиндры снабжен обшм корпусом и попарно закреплен во взаино перпендииулярны плоскостях со смешении друг относительно дуга на расстояние не менее длиы хода поршня и установлены штоками навстречу друг дугу, балки связаы со штоками посредством шарнров, силовая полость каждого гидроцилиндра связана с источннном высокого давления посредством каналов, вполненныи в штоке и корпусе соответствующего шарнира с возможностью смещения друг относительно руга шарнирнопо и штокового участков каналов, пичем цепь размещена между гидроцилицрами по оси устройства, каждое из звеньев цеп установлено с возможностью взаимодействия с парам направляющих ВУчьев, которми оснащено устройство, расположенныи вдоль цепи во взаимно перпендикулярных плоскостях, захваты ыполнены в виде упрупо-поджаты н цепи и помешенныив опорые гнезда собачек, причем ообачи одного из захватов в каждой паре расположен на внешней, а дугой - на внутренней стороне сответствуюних балок, пи этом устройство снабжено жестко связанными между собой пластиами одна из которыи раемепцена между парами гидроцилиндров, а другие - по вещам устройства, а торцы гидроцилиндов оснащеы шаровыми сегментами, установлеными в опорнни гнездах, выполнены в пластинах, причем шаровая поверхность опорны гнеад иеет даметр, равый расстояню между ними.Такое выолнение позволяет осуществлять непрерывное перемещение грузов при стационарном расположении устройотва, обеспечивает сниение ивгибаюши денормаий в его элементах, полностью механизирует управление захватами. Тем сами увеличиваются эксплуатационные возможности и надежность устройства.Изобретено поясняется чертежами, пде на фиг. 1, фиг. 2 показан осевые сеченя устройства взаимно перпендиулрыми плоскостями по А-А и В- В, на фиг. З - сечение фиг. 1 по С-С, на фиг. 4 аксонометрическое изображение одной из балок с захватами, на фиг. 5 - волнение звеньев цепи.Тяговое устройство вкючает корпус 1 с центрируюшими профильными отверстиями по торцам, в корпусе укреплены пары цилиндров 2 и 3, содержащие поршн 4 со штоками 5 иб,посредством шарниров 7 и 8 соединен с балками 9 и 10. В штоках 5, 6 и шарнирах 7, 3577 48 выполнены талья, состоящие из штоковых 11 и шарнирных 12 участков. На балках9 и 10 размещены захваты, состоящие из пар взаимодействуют со звеньями цепи 13 собачек 14, помещенных с возможностью вращения в упорные гнезда 15 и подшатых к цепи упругими элементами 16. Звенья цегм взаимодействии с парамиручьев 17, укрепленных кошками на торцах корпуса 1. Кроме этого, в шипом звене цепи 13 боковые стороны связаны между собой посредством гшангм 18. На торцах пар шлинпров 2, 3 выглслнеъш сегменты шаровой поверхности 19, которые установлены в опорных гнездах, вьптолненньж на пластинах 20, 21, 22, первые из которых установлены по краям устройства, а последняя - медлу парами гмлщдров 2 и 3. При этом пластины 20, 21, 22 жестко связаны продольными связями 23.Работает устройство слегкуюгцим образом. В положении, показанном на фиг. 1, гидропуиплнпры 2 совершают работай, а гищэоцгллщгцэь 3 - холостой ход, при этом их штоки выдвигаются. Высокое давление подано в подпоршневые полости гшоцшгиндров, причем в гидроцилиндр 2 посредством каналов 11 в их штоках 5 и каналов 12 в шарнирах 7, а вЗ - непосредственно. Со сливом в обоих случаях Штоковые полости гидроцилиндров соединяются непосредственно. Во время рабочего хода гидроцилиндров 2, упругие элементы 16 соответствующего захвата обеспечивают контакт собачек 14 со звеньями цепи 13 на одно из которых собачки 14 через упорные гнезда 15 на балке 9 передают усилия гидроцилиндров 2, приводя цепь в двишение. В это время захват гилроцилшшров 3, совершающий холостой ход, с цепью 13 не взашлодействует, так как соответствующие собачки поворачиваются в опорных гнездах при встрече с ее звеньями.Для обеспечения наценкой работы совершающего рабочий ход захвата, необходимо отсутствие перекосов соответствующей балки, т.е. синхронное перемещение штоков гидРОШЛИНПРОВ Это осуществляется благодаря подвинности штоковых 11 и шарнирных 12 участков каналов относительно друг друга. Вследствие шарнирной связи балок со штокамлл оперелеъгие одним из штоков другого приводит к развороту балки, благодаря чему каналы 11 и 12 смещаются друг относительно друга. Они вьшолнены таким образом /иг. 1, 2/ что проходное сечение канала, подводящего рабочее тело в опережающий гидроцилиндруменьшается, а в другом гицрсшшиндре остается прежним. В результате подача рабоче го тела в оперенагшллй гидроцилиндр сминается и штсни 5 выравнивается, устраняя перенос балки. Взаимное перемещение штоков и вызванные этим перекосы балок здесь не приводят к возникновение в штснах жених-либо деформаций. , так как корпуса гидроцилиндрсв 2 и З могут поворачиваться в гнездах на пластинах 20, 21, 22 благодаря выполнению их торцов в форме сегментов шаровой поверхности, диаметр которой равен расстоянию мешгу состветствугоиллм гнездами. В данном случае тега/м образом осуществляется перемещение цепи 13 на величину раацвшкности гиггрсшшигггрсв 2. Перед окончанием рабочего хсда завершается холостой ход гипрсщшщдров 3, которые Перенимается на рабочий ход, не дожидаясь завершения рабочего хода другой пары. это позволяет осуществлять двшление цегпл плавно, без рывков с постоянной скоростью. На сиг. 2 показано устройство в момент совершения рабочего хода гищэсщшшгпрсчьш 3 и холостого гидрсииггщщэаьм 2. Рабочее тело подается в Штоковые полости гидрохимии-низов, причем в гипрсгдллингдэы 3 по каналам 11 и 12, а в гидроцъшинпры 2 - непосредственно. Со спивсм псдпоршневые полости всех гидроцилиндров соединяется непосредственно. Захваты гидроцилиндров 3 аналогично списашгош выше. для устойчивой работы захватов в обсих случаях необходимо, чтобы ориентация звеньев цегм 13 и расстояние менщ/ шали были одинаковыми. Это достигается благодаря тому, что внутри устройства все звенья цепи 13 находятся во взаимодействии с нручьями 17, обеспечил/высшим их постоянную ориентацию, а планки 19 сиг. 5 препятствуют изменению расстояния метод звеньями и собиранию их в гармошку. При этом ручьи 17 шфеплены таним образом,чтобы сохранить междуручьями и гицрогшинпраш достаточные зазоры,через которые проходят средние участки балок 9 и 10. Для обеспечения обратного хода устройство снабненощдополнггтельнсй парой захва тов /на чертежах не псназаннойм размещенных на балках симметрично изобранеъшьм, а в штонах и шары/грех каждой пары гидрогмлгщщэов выполнены дополнительные каналы в других гидрсцилинцрах. С источником высокого давления каналы в гсандом гипроцихпкл-щре сообщаются посредством распределительных устройств /не показаны/ц позволяющих включать каналы в работу поочередно.ДИН РЭВЭРСИООВЭЪТШ ТЯГОВОЮ УСИЛИЯ В ЭЗбОТУ ВЮПОЧЫОТСЯ ДОПОЛНИТВПЬНЬХЭ КЭНЭЛЫ
МПК / Метки
МПК: E21F 13/00, E21C 5/06
Метки: тяговое, устройство
Код ссылки
<a href="https://kz.patents.su/9-3577-tyagovoe-ustrojjstvo.html" rel="bookmark" title="База патентов Казахстана">Тяговое устройство</a>
Устройство для подачи прутка в токарном автомате
Номер патента: 3542
Опубликовано: 10.06.1996
Авторы: Фатеев Виктор Григорьевич, Колотвинов Александр Вячеславович, Беков Думан Алмасович, Тусупбеков Махабат Рымкулович
МПК: B23Q 7/06, B23B 13/00
Метки: устройство, прутка, подачи, токарном, автомате
Формула / Реферат:
Изобретение относится к области станкостроения, в частности к устройствам для подачи прутка в токарном автомате.Цель изобретения - уменьшение габаритов устройства.Устройство содержит корпус, направляющую, в которой установлен толкатель, гибкий элемент, звездочку, привод и зажимную цангу. Устройство снабжено барабаном с винтовой канавкой, звездочка установлена на оси поворота барабана, а цепь выполнена с подпружиненными между собой звеньями, один...
Гусеничное ходовое устройство для снабженного собственным приводом транспортного средства
Номер патента: 1816
Опубликовано: 15.03.1995
Авторы: Гельмут Бентц, Гюнтер Альперс
МПК: B62D 55/08
Метки: ходовое, транспортного, устройство, приводом, средства, собственным, снабженного, гусеничное
Формула / Реферат:
1. Гусеничное ходовое устройство для снабженного собственным приводом транспортного средства, содержащее ведущее и направляющее колеса и звенчатую гусеничную цепь с почвозацепами, причем на ведущем колесе в его продольной плоскости размещены кулачковые зубья, у которых на обращенных одна к другой сторонах выполнены плоские поверхности, почвозацепы звеньев выполнены за одно целое с цевками звена, обращенными в сторону плоских поверхностей зубьев...
Анодное устройство электролизера
Номер патента: 1916
Опубликовано: 15.03.1995
Авторы: Будкевич Николай Павлович, Спиридонов Анатолий Павлович, Колосов Юрий Николаевич, Цыбуков Игорь Кириллович, Шрамко Вячеслав Александрович
МПК: C25C 3/16
Метки: анодное, устройство, электролизера
Формула / Реферат:
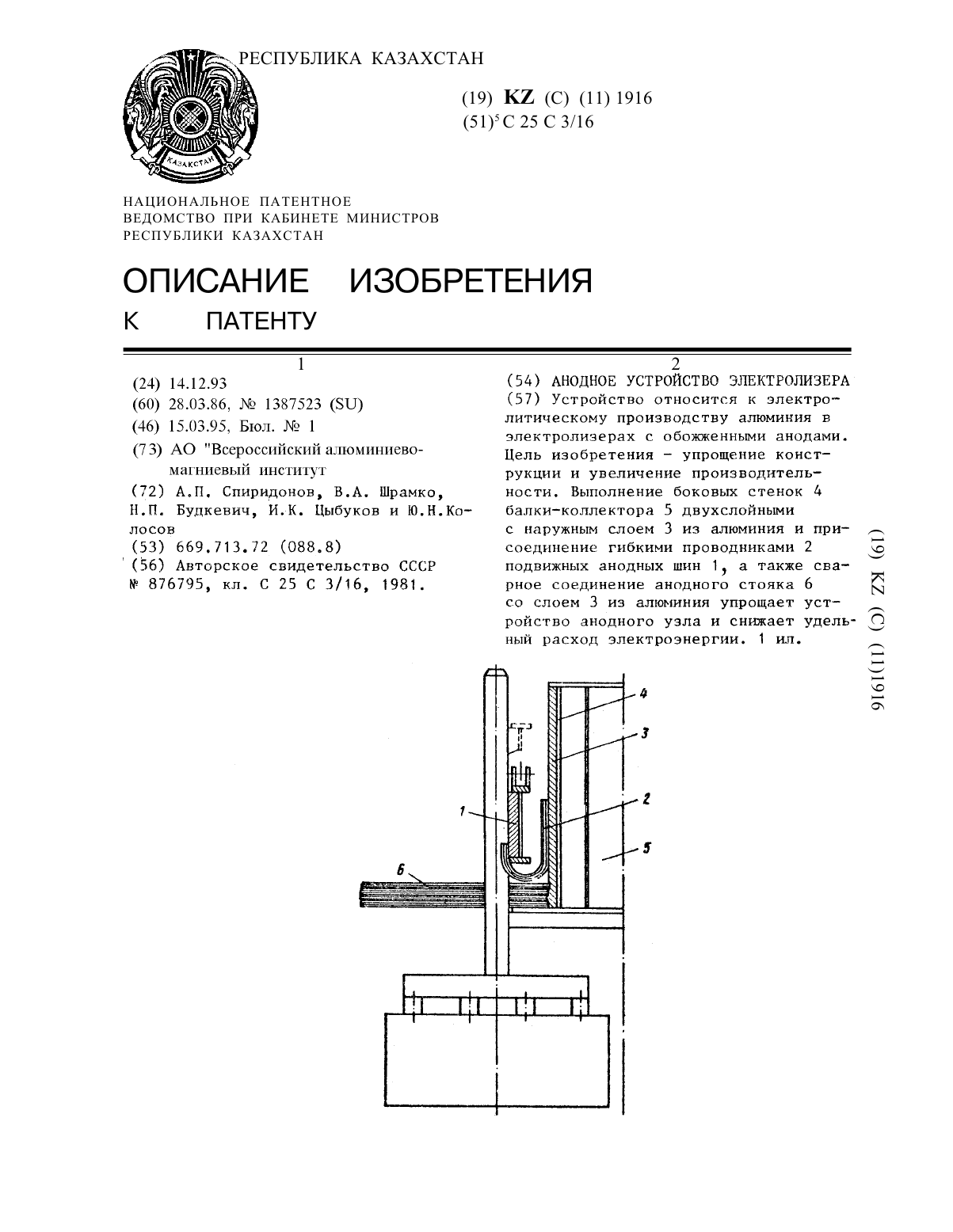
Устройство относится к электролитическому производству алюминия в электролизерах с обожженными анодами. Цель изобретения - упрощение конструкции и увеличение производительности. Выполнение боковых стенок 4 балки-коллектора 5 двухслойными с наружным слоем 3 из алюминия и присоединение гибкими проводниками 2 подвижных анодных шин 1, а также сварное соединение анодного стояка 6 со слоем 3 из алюминия упрощает устройство анодного узла и снижает...
Устройство токоподвода и способ питания электролизеров для получения алюминия
Номер патента: 3495
Опубликовано: 10.06.1996
Авторы: Бернар Лангон, Жозеф Шаффи, Мишель Леруа
МПК: C25C 3/16
Метки: токоподвода, алюминия, получения, устройство, питания, электролизеров, способ
Формула / Реферат:
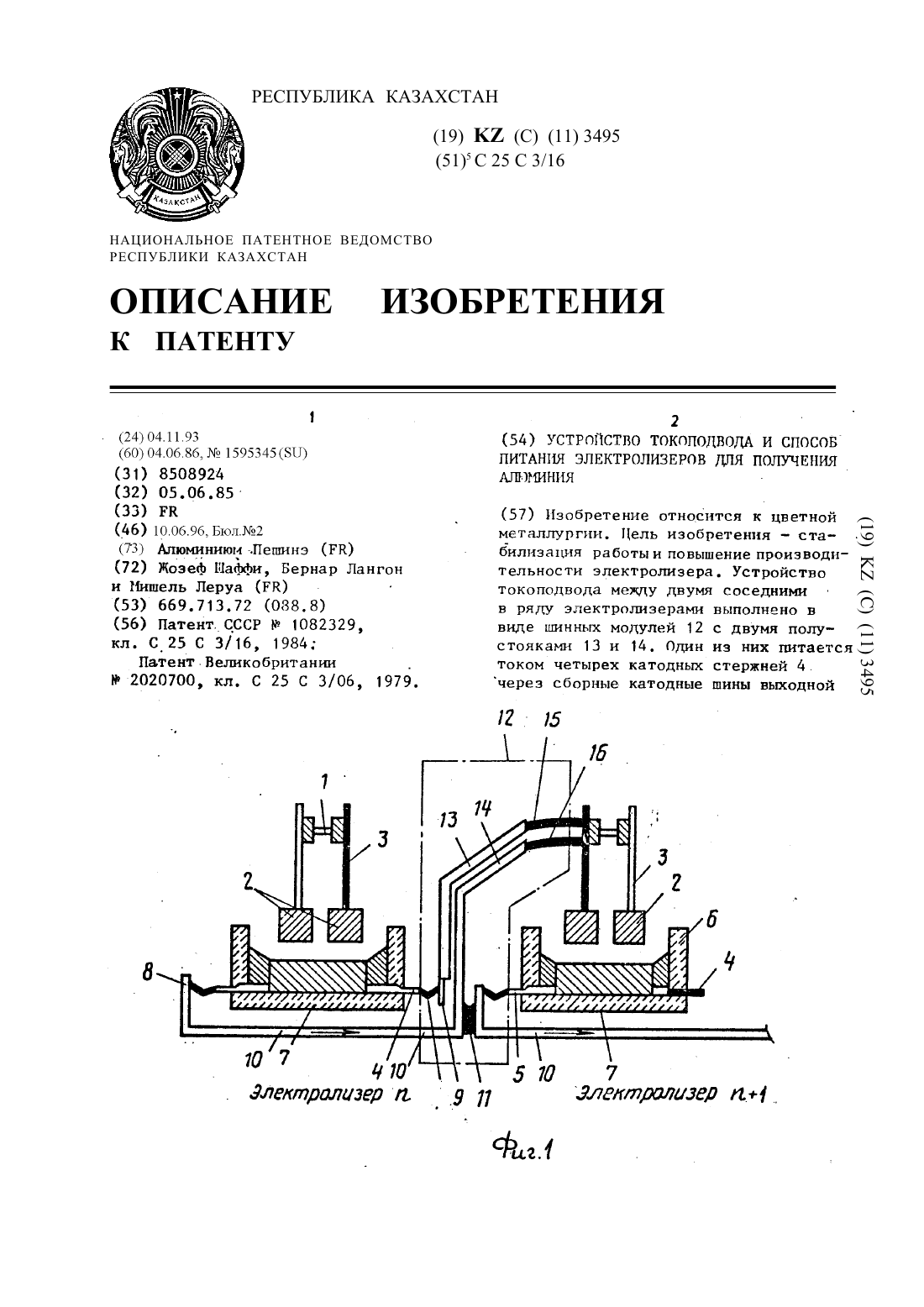
Изобретение относится к цветной металлургии. Цель изобретения - стабилизация работы и повышение производительности электролизера. Устройство токоподвода между двумя соседними в ряду электролизерами выполнено в виде шинных модулей 12 с двумя полустояками 13 и 14. Один из них питается током четырех катодных стержней 4 через сборные катодные шины выходной стороны 9 катодного кожуха 6 эдектролизера. Другой (14) посредством соединительной шины 10,...
Устройство для резания металлов с подогревом в зоне резания электрическим током
Номер патента: 454
Опубликовано: 15.03.1994
Автор: Усиков Анатолий Николаевич
МПК: B23B 25/06
Метки: электрическим, током, металлов, подогревом, резания, зоне, устройство
Формула / Реферат:
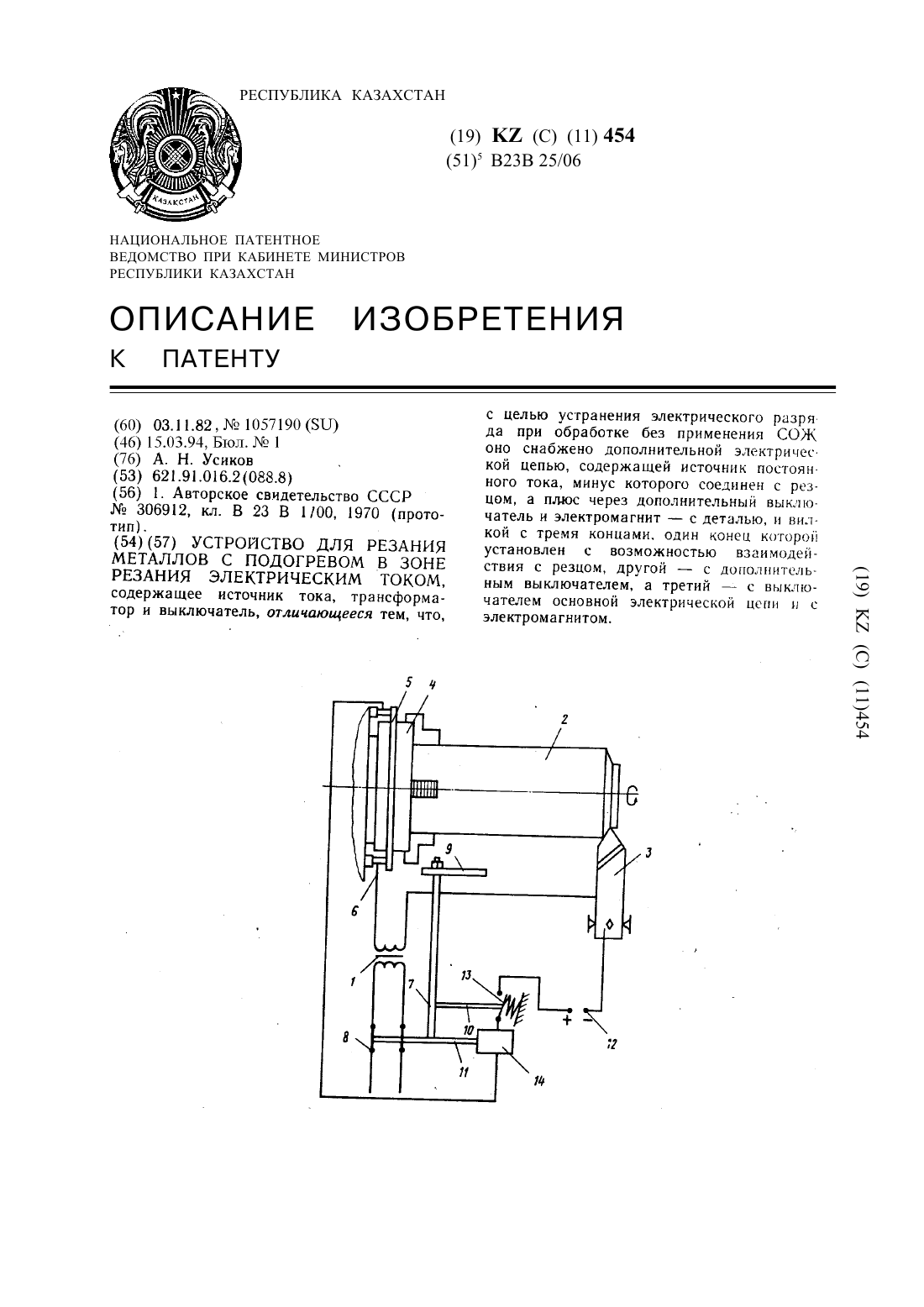
УСТРОЙСТВО ДЛЯ РЕЗАНИЯ МЕТАЛЛОВ С ПОДОГРЕВОМ В ЗОНЕ РЕЗАНИЯ ЭЛЕКТРИЧЕСКИМ ТОКОМ, содержащее источник тока, трансформатор и выключатель, отличающееся тем, что, с целью устранения электрического разряда при обработке без применения СОЖ оно снабжено дополнительной электрической цепью, содержащей источник постоянного тока, минус которого соединен с резцом, а плюс через дополнительный выключатель и электромагнит - с деталью, и вилкой с тремя концами,...
Предыдущий патент: Кладочный раствор для футеровки высокотемпературных агрегатов
Следующий патент: Устройство безопасности работы лифта
Случайный патент: Сборная изложница