Передвижной колесный робот
Текст
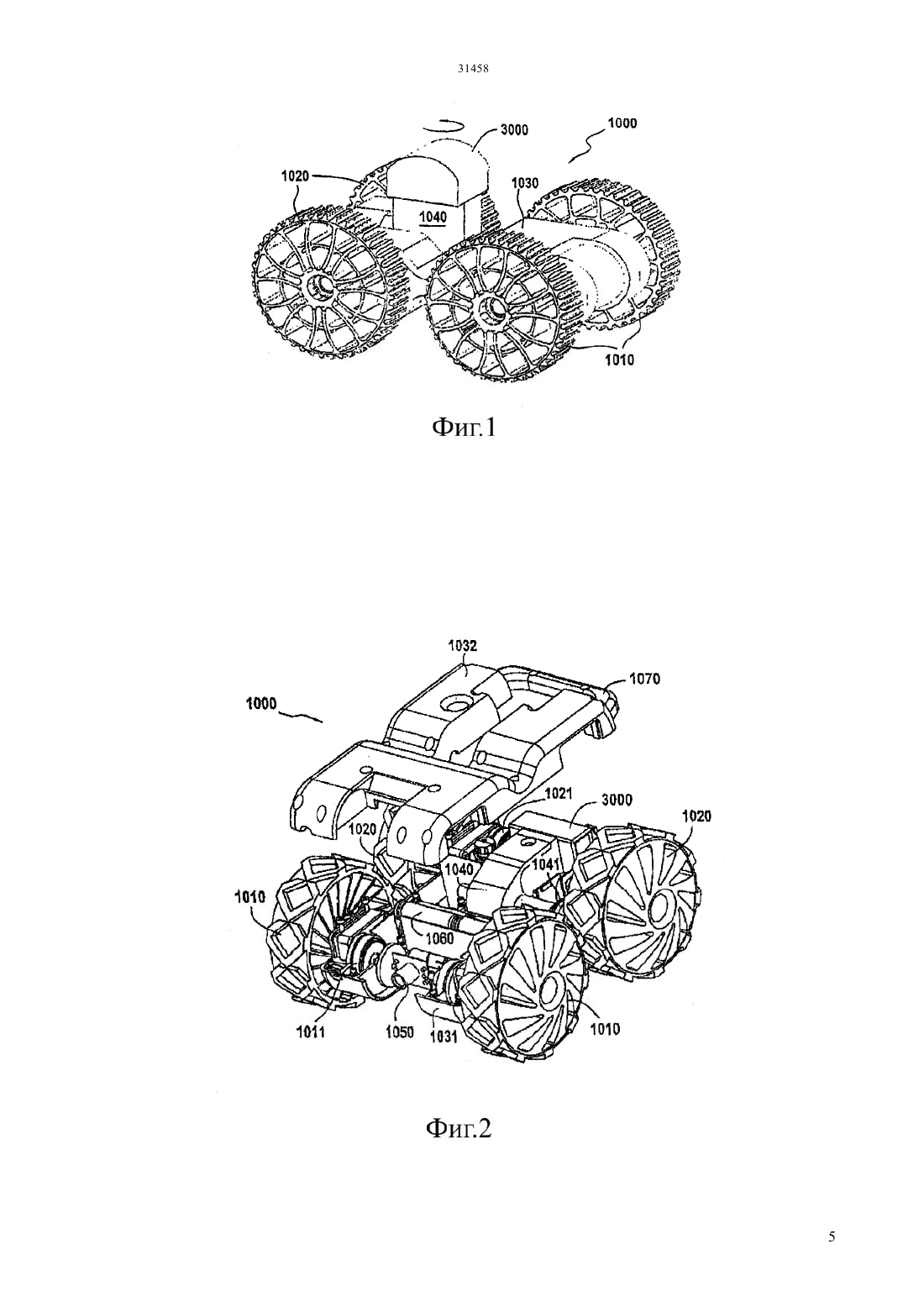
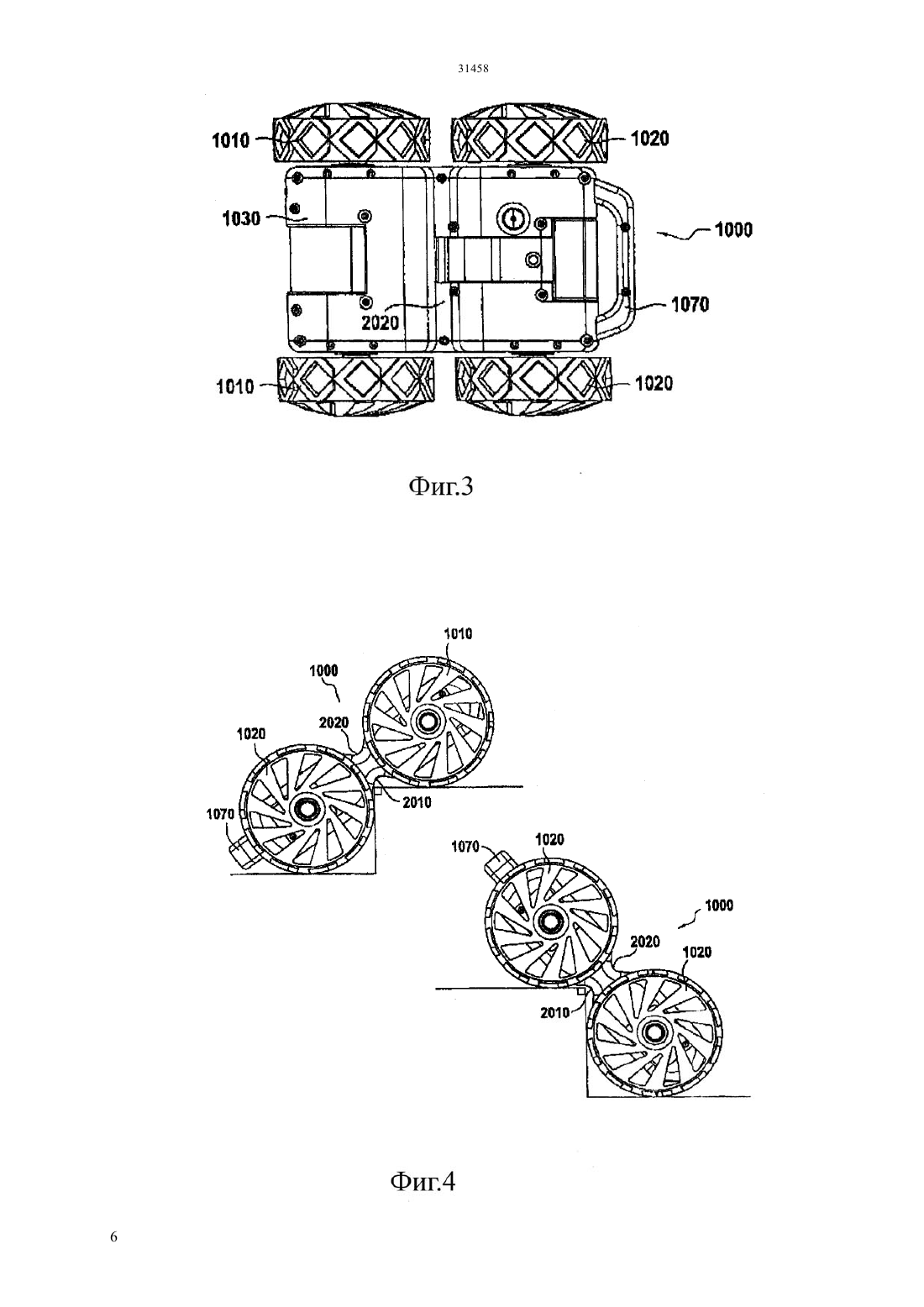
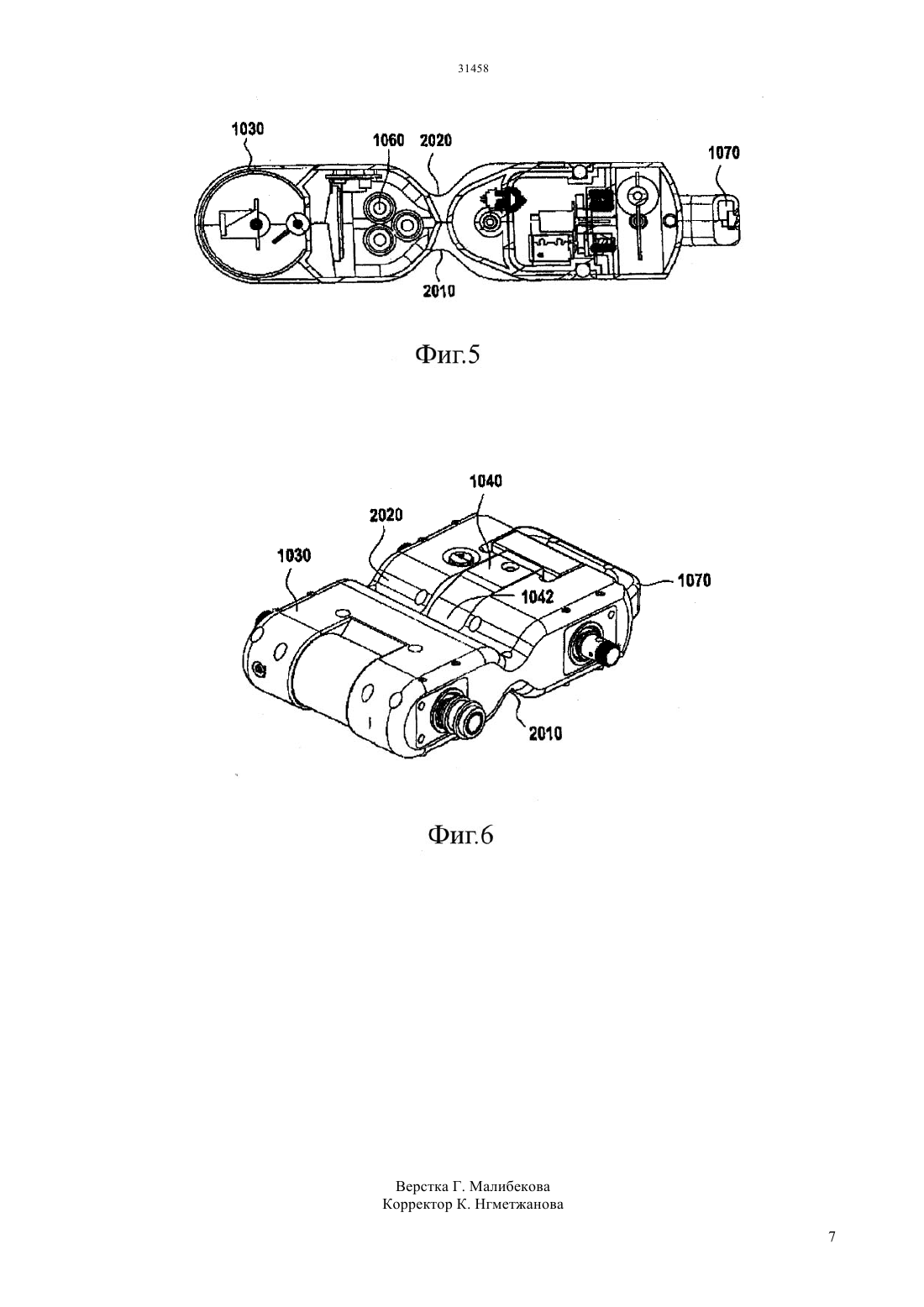
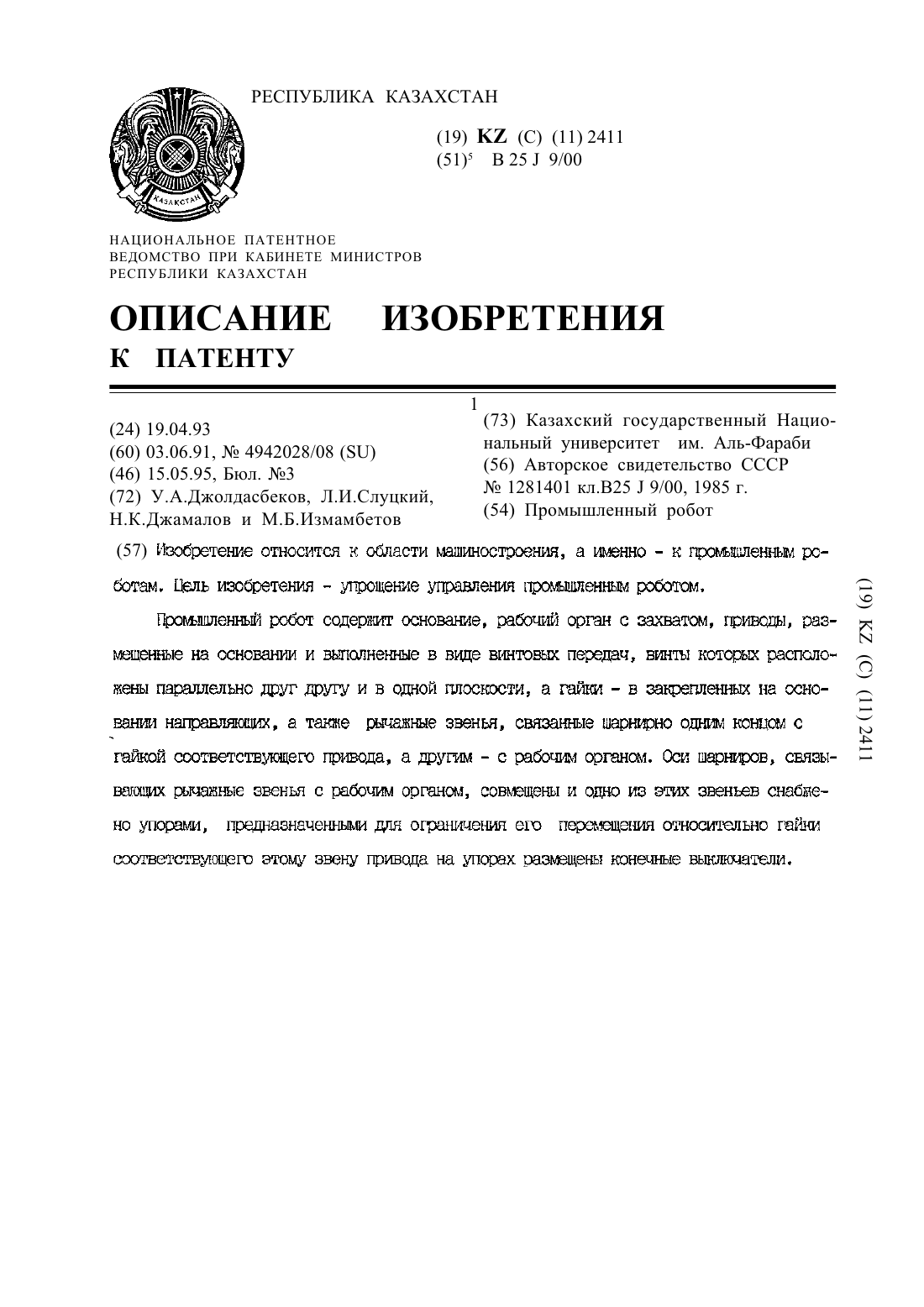
(51) 62 57/024 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(1000), содержащему колеса (1010, 1020),размещенные на двух параллельных осях вращения,а также раму с преимущественно плоской поверхностью, расположенную между двумя осями вращения. Робот характеризуется тем, что поверхность рамы включает расположенные между двух осей вращения углубления (2010, 2020),расположенные параллельно осям вращения,предназначенные для того, чтобы позволить роботу(1000) передвигаться через препятствие, имеющее угол, без удара рамы (1030) участком, находящимся между осями вращения, об угол препятствия.(74) Шабалина Галина Ивановна Шабалин Владимир Иванович Тусупова Меруерт Кырыкбаевна Локтева Юлия Михайловна Область техники, к которой относится изобретение - известный уровень техники Данное изобретение относится к передвижным роботам, оснащенным жсткой рамой и колесами,установленными на двух отдельных осях, а более конкретно, оно предназначено для роботов,используемых в военных целях или применяемых для гражданской обороны. Такие роботы оснащены различными устройствами, такими как камера или манипулятор,установленные на раме, которая размещается между колесами. Они передвигаются на расстоянии от человека-оператора,зачастую на неровной поверхности грунта, и управляются по радио. Передвижение на колесах является предпочтительным по сравнению с передвижением на гусеницах, так как колеса позволяют роботу двигаться быстро с высоким коэффициентом использования энергии. Незначительный вес робота позволяет ему передвигаться быстро. Количество колес - обычно четыре два спереди и два сзади,однако, иное количество колес также возможно. Такие роботы могут традиционно предназначаться для обнаружения и обезвреживания мин, но также, в более общем смысле, для проверки внутренних или внешних объектов, таких как помещения или улицы в районе боевых действий. Например, известен роботкомпании . Он перемещается с ограниченной скоростью и не соответствует требованиям ситуаций, возникающих в районах боевых действий. Если поверхность неровная, он должен быть оснащен гусеницами и за счет этого имеет значительный вес. Также известен роботкомпании ЕСА, специально предназначенный для проверки внутренних или наружных объектов и выполнения ряда действий. Этот робот не предназначен для преодоления препятствий,к примеру,передвижению через бордюрный камень или лестничную ступеньку. Раскрытие сущности изобретения - преимущества,возникающие при его использовании Для повышения степени безопасности персонала, задействованного в зонах повышенной опасности, целесообразно создавать роботы,способные быстро передвигаться по любой поверхности, без необходимости совершения какого-либо сложного маневра. Таким образом,целесообразно, чтобы робот мог преодолевать бордюрный камень или лестничную ступеньку без затраты времени, а также без необходимости какоголибо механического воздействия для выполнения этого. Кроме того, важно, чтобы робот был легковесным для того, чтобы он мог запускаться оператором вручную, и чтобы затем мог быстро передвигаться, непосредственно после того, как он будет запущен. Таким образом,настоящее изобретение относится к передвижному роботу, содержащему колеса, установленные на двух параллельных осях вращения, а также раму, имеющую по существу 2 плоскую поверхность, расположенную между двумя осями вращения, отличающемуся тем, что поверхность рамы включает расположенное между двумя осями вращения углубление, проходящее параллельно осям вращения для того, чтобы позволить роботу двигаться вперед через препятствие, имеющее угол, таким образом, чтобы рама между осями вращения не натолкнулась на этот угол. Таким образом,данный робот может передвигаться очень быстро в любых обстоятельствах и действовать быстро в затруднительных ситуациях, в которых оператор желает использовать его, даже если необходимо преодолевать препятствия. Такой робот способен участвовать в ближнем бою, например, для перехвата неприятеля, в частности, в пределах населнных пунктов или внутри помещений. Кроме того он может также применяться в условиях гражданской жизни, а именно, для слежения за порядком в местах заключения или для оказания содействия в поддержании порядка в условиях общественных волнений. Помимо этого,данное устройство характеризуется,в некоторых вариантах осуществления изобретения, следующим образом. Углубление может иметь профиль, который, с учетом диаметра колес, позволяет роботу двигаться вперед через препятствие, имеющее прямой угол,находящийся спереди, таким образом, чтобы рама не была ударена углом препятствия. Углубление может находиться на середине расстояния от двух осей вращения. Если робот имеет переднюю сторону и заднюю сторону, тогда одна из осей вращения является передней осью, а другая - задней осью, и, в этом случае, предпочтительно, чтобы центр тяжести находился ближе к передней оси, чем к задней оси. В этом случае, в частности,аккумуляторы (батареи) робота могли бы располагаться в передней его части. Более того,робот может иметь, минимум, одно переднее приводное колесо иди одно заднее приводное колесо, в случае, если имеется два передних колеса и два задних колеса, но возможна и другая схема компоновки. Согласно особо предпочтительной модификации,передвижной робот может передвигаться на колесах в первом исходном положении или, в случае если он перевернется, в перевернутом положении, при этом рама включает по существу плоские поверхности, которые расположены между двумя осями вращения, при этом каждая из этих поверхностей имеет расположенное между осями вращения углубление,проходящее параллельно осям вращения для того,чтобы позволить роботу продвигаться вперед через препятствие, имеющее угол, при этом не ударяя препятствием раму между осями колес. Этот робот является переносным,имеет возможность переворачиваться,потому что он может передвигаться как в прямом, так и в перевернутом положении. Таким образом, он специально приспособлен к действию в боевой обстановке. Предпочтительно, робот может быть оснащен плоскими бесколлекторными электродвигателями для его передвижения. Эти электродвигатели позволяют роботу двигаться на очень высокой скорости. Передвижной робот в специальном исполнении предназначен для военных операций на открытом воздухе. Таким образом, он характеризуется, к примеру,водонепроницаемой структурой,использованием материалов, устойчивых к плесени,а также устойчивых к солнечной радиации и огню,таких как полиуретан для изготовления его наружного корпуса. Таким образом, робот может использоваться в районе боевых действий на открытом воздухе, и может проявлять высокую устойчивость и сопротивляемость трудным условиям, которым он может подвергаться в таком районе боевых действий. Краткое описание рисунков Данное изобретение теперь будет описано со ссылкой на следующие прилагаемые чертежи. На Фиг.1 показан общий вид робота в соответствии с данным изобретением. На Фиг.2 приведено изображение конструкции робота в разобранном виде согласно данному изобретению, при этом робот изображен с крышкой в открытом положении. На Фиг.3 показан вид робота сверху. На Фиг.4 показан вид робота сбоку,поднимающегося на ступеньку,а затем спускающегося со ступеньки. На Фиг.5 показан вид рамы в разрезе сбоку. На Фиг.6 показан вид рамы в перспективе. Подробное описание На Фиг.1, показано изображение робота 1000. Робот 1000 включает два коаксиальных передних колеса 1010 и два коаксиальных задних колеса 1020,с осью вращения, параллельной оси передних колес 1010. Задние колеса 1020 имеют тот же диаметр, что и передние колеса 1010. Робот 1000 также включает раму прямоугольной формы 1030 толщиной меньше диаметра колес,размещенную между ними. Колеса закреплены на раме 1030 и робот 1000 имеет, в целом, плоскость симметрии, проходящую через оси колес. Колеса определяют две плоскости движения, на которых робот может размещаться и передвигаться и которые при этом параллельны, так как передние и задние колеса имеют один и тот же диаметр. Таким образом, робот имеет две поверхности, имеющие идентичные функции, с точки зрения передвижения,которые определяют две возможные плоскости движения. Робот 1000 оснащен манипулятором 1040,например, шарнирно соединенный с возможностью поворота вокруг оси, расположенной параллельно и в одной плоскости с осями колес. Манипулятор 1040 может находиться как минимум, в трех положениях. Первое положение представляет собой положение хранения (показано на фиг.2-6), в которой манипулятор находится внутри объема рамы. Таким образом, робот 1000 может передвигаться на любой плоскости движения, безразлично какой, когда манипулятор 1040 находится в положении хранения,при этом он находится между двумя плоскостями движения. Другие два положения манипулятора являются развернутыми положениями, в которых манипулятор находится в поднятом состоянии. При этом развернутое положение создаются путем поворота манипулятора на 90 по отношению к положению хранения. Манипулятор 1040 может переносить полезную нагрузку 3000, указанную на Фиг.1, установленную с возможностью поворота. Здесь в частности показан дальномер 3000, который установлен с возможностью свободного поворота в верхней части манипулятора 1040 в развернутом положении. На Фиг.2 изображен робот 1000 с рамой 1030 в открытом положении, для того, чтобы показать внутренние компоненты. Манипулятор 1040 находится в положении хранения. Робот 1000 изображен с двумя половинами 1031 и 1032 рамы,отделенными друг от друга. Рама, к примеру, может быть изготовлена из полиуретана, но можно также использовать другие материалы, такие как акрилонитрил-бутадиен-стирол, в зависимости от выбора конструкции. Рама поддерживает четыре колеса 1010 и 1020,каждое из которых управляется плоским бесколлекторным электродвигателем 1011 и 1021. Эти электродвигатели не зависят друг от друга и получают питание от аккумуляторов (батарей) 1060,а также управляются контроллером (не показан),получающим команды по радио. Колеса не являются поворотными, однако,изменение скоростей вращения на левых и правых колесах позволяет поворачивать робот в одну или другую сторону. Электродвигатели могут позволить роботу двигаться на высоких скоростях, например,до 20 км/ч. Робот оснащен камерой 1050, расположенной между передними колесами на раме 1030. Камера 1050 является многонаправленной видеокамерой. Робот может быть оснащен четырьмя камерами,некоторые из которых могут обеспечивать наблюдение в ночных условиях с высоким разрешением. С противоположной стороны от камеры, робот оснащен рукояткой 1070, которая позволяет оператору управлять им и перемещать его. На Фиг.3 показан вид робота 1000 сверху. Вполне примечательно, что робот 1000 имеет раму,которая характеризуется наличием углубления 2020 между осями передних и задних колес. Нижняя поверхность рамы, которая, по существу, плоская,пересекается углублением 2010 параллельно осям колес, с противоположной стороны робота. Углубление имеет, в целом, - образный профиль. На Фиг.4 изображен робот 1000,преодолевающий препятствие, имеющее прямой угол, такое как лестничная ступенька или бордюрный камень (левая часть рисунка). Прежде всего, робот поднимается на ступеньку передними колесами, а затем, с учетом расстояния между передними колесами и задними колесами,оказывается в положении, когда передние колеса 3 опираются на горизонтальную поверхность ступеньки, а задние колеса упираются в другую поверхность ступеньки,которая является вертикальной. С целью недопущения удара рамы углом ступеньки в этой ситуации, предусмотрено углубление 2010 таким образом, что ее глубина и ширина позволяют, с учетом диаметра колес и расстояния между ними, принять в себя угол ступеньки, на которую поднимается робот. Угол ступеньки занимает пустое пространство углубления и, следовательно, не ударяется о поверхность рамы. Робот продолжает движение благодаря действию колес и полностью поднимается на ступеньку. Тот же принцип используется для спуска робота с препятствия(правая часть рисунка). На Фиг.5 изображена рама 1030 на виде в разрезе, в средней плоскости, перпендикулярной осям колес. Представлено, в частности, углубление 2010, но также и углубление 2020, расположенное с другой стороны рамы 1030, симметрично углублению 2010. Таким образом, робот может передвигаться на любой поверхности движения и, в обоих случаях предусмотрено, что профиль рамы приспособлен для облегчения преодоления препятствий. Можно также отметить что размещение аккумуляторов (батарей) 1060 в передней части робота приводит, наряду с другими особенностями распределения веса конструкции, к расположению центра тяжести робота ближе к оси передних колес,чем к оси задних колес, что способствует преодолению препятствий, таких как ступеньки. На Фиг.6 изображена рама 1030 робота в закрытом положении, без колес. Виден манипулятор 1040, а также полезная нагрузка, расположенная на его конце. Манипулятор находится в сложенном положении хранения. Видно углубление 2020, а также углубление 2010. Основание 1042 манипулятора 1040, когда он находится в сложенном положении, находится поблизости от профиля углублений 2010 и 2020, на любой стороне рамы. Шины колес предпочтительно изготавливаются из полиуретана, так же, как и рама. Структура выполнена водонепроницаемой и огнестойкой. Данное изобретение описывается со ссылкой на чертежи, на которых изображены конкретные примеры воплощения, однако, оно распространяется на все альтернативные варианты в объеме притязаний формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Передвижной колесный робот (1000),содержащий колеса (1010, 1020), предназначенный для передвижения на колесах, размещенных на двух параллельных осях вращения, а также раму (1030) с преимущественно плоской поверхностью,расположенную между двумя осями вращения,отличающийся тем, что поверхность рамы включает расположенные между двух осей вращения углубления (2010, 2020), расположенные параллельно осям вращения, предназначенные для того, чтобы позволить роботу (1000) двигаться через препятствие, имеющее угол, без удара рамы (1030) участком, находящимся между осями вращения, об угол препятствия. 2. Передвижной робот по пункту 1,отличающийся тем, что углубление (2010, 2020) имеет профиль, который, с учетом диаметра колес(1010, 1020), позволяет роботу (1000) преодолеть находящееся впереди препятствие, имеющее прямой угол, без удара рамы (1030) о прямой угол препятствия. 3. Передвижной робот по пункту 1 или 2,отличающийся тем, что он выполнен с возможностью передвижения на колесах (1010,1020) по одной поверхности движения или, после того, как он перевернется, по второй поверхности движения, при этом рама (1030) содержит по существу плоские лицевые поверхности между двумя осями вращения колес и на каждой из двух лицевых поверхностей имеет расположенные между осями вращения, углубления (2010, 2020),проходящие параллельно осям вращения для того,чтобы позволить роботу (1000) преодолевать препятствие, имеющее угол, без удара рамы (1030) участком, находящимся между осями вращения, об угол препятствия. 4. Передвижной робот по одному из пунктов 1-3,отличающийся тем, что углубление (2010, 2020) находится на середине расстояния между двумя осями вращения. 5. Передвижной робот по одному из пунктов 1-4,отличающийся тем, что одна из осей вращения является передней осью, а другая-задней осью, а центр тяжести робота находится ближе к передней оси, чем к задней оси. 6. Передвижной робот по одному из пунктов 1-5,отличающийся тем, что он содержит аккумуляторы(батареи) (1060), расположенные в передней части робота (1000). 7. Передвижной робот по одному из пунктов 1-6,отличающийся тем, что передние колеса (1010) имеют такой же диаметр, как и задние колеса (1020). 8. Передвижной робот по одному из пунктов 1-7,отличающийся тем, что он включает, как минимум, одно переднее приводное колесо (1010) или заднее приводное колесо (1020). 9. Передвижной робот по одному из пунктов 1-8,отличающийся тем, что он включает два передних колеса (1010) и два задних колеса (1020). 10. Передвижной робот по одному из пунктов 1-9, отличающийся тем, что он оснащен плоскими бесколлекторными электродвигателями для его передвижения. 11. Передвижной робот согласно одному из пунктов 1-10, отличающийся тем, что он приспособлен для работы в условиях военных действий вне помещений.
МПК / Метки
МПК: B62D 57/024
Метки: колесный, передвижной, робот
Код ссылки
<a href="https://kz.patents.su/7-31458-peredvizhnojj-kolesnyjj-robot.html" rel="bookmark" title="База патентов Казахстана">Передвижной колесный робот</a>
Передвижной робот, содержащий манипулятор

Номер патента: 31391
Опубликовано: 29.07.2016
Авторы: БУРАУ, Лоран, СТЭ, Бруно
МПК: B25J 5/00, B62D 57/024
Метки: манипулятор, передвижной, содержащий, робот
Текст:
... устройства, или дальномер. 13. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что манипулятор(1040 2040) оборудован радиоантенной. 14. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он оснащен колесами (1010, 1020 2010, 2020) или гусеницами. 15. Передвижной робот по одному из предшествующих пунктов, отличающийся тем, что он приспособлен для работы в условиях военных действий вне...
Промышленный робот
Номер патента: 2411
Опубликовано: 15.09.1995
Авторы: Джолдасбеков Умирбек Арисланович, Джамалов Нутпулла Камалович, Измамбетов Мырзабай Базарбаевич, Слуцкий Леонид Иосифович
МПК: B25J 9/00
Метки: робот, промышленный
Формула / Реферат:
Изобретение относится к области машиностроения, а именно - к промышленным роботам. Цель изобретения - упрощение управления промышленный роботом. Промышленный робот содержит основание, рабочий орган с захватом, приводы, размещенные на основании и выполненные в виде винтовых передач, винты которых расположены параллельно друг другу и в одной плоскости, а гайки - в закрепленных на основании направляющих, а также рычажные звенья, связанные шарнирно...
Робот телеприсутствия
Номер полезной модели: 1324
Опубликовано: 15.09.2015
Автор: Калиаскаров Нургожа Арманович
МПК: B25J 9/00
Метки: робот, телеприсутствия
Формула / Реферат:
Полезная модель относится к области робототехники и может быть применена в качестве мобильного робота, передвигающего посредством оператора с с эффектом телеприсутствия.Техническим результатом является повышение скорости манипуляции, высокая скорость передвижения, износостойкость компонентов робота.Это достигается тем, что робот телеприсутствия, включающий платформу с манипулятором, согласно полезной модели, снабжен платформой, содержащей...
Игрушка робот-клоун
Номер полезной модели: 918
Опубликовано: 15.03.2013
Авторы: Сейдалы Султанали Садатович, Сейдалиев Садат Камалович, Сейдалиева Алия Пернекуловна
МПК: A63H 3/00
Метки: игрушка, робот-клоун
Формула / Реферат:
Игрушка робот-клоунПолезная модель относится к индустрии детских товаров, а именно, к производству игровой продукции, оказывающей позитивное влияние на развитие ребёнка и обладающей звуковым, танцевальным, двигательным эффектами, оформленные в визуально яркой, привлекательной форме, как комбинация робота и мягкой игрушки-куклы, с воспитательной целью и для развлечения.Технический результат: создание комбинации робота и мягкой игрушки-куклы,...
Колесный диск для автомобильного колеса с бескамерной шиной
Номер патента: 21198
Опубликовано: 17.10.2011
Автор: Дубровин Николай Александрович
МПК: B60C 23/00, B60C 5/00
Метки: бескамерной, автомобильного, колеса, шиной, колесный, диск
Формула / Реферат:
Изобретение относится к автомобильному транспорту, в частности, к автомобилям с колесами, оснащенными бескамерными шинами.Предлагается простое необслуживаемое устройство, обеспечивающее постоянное автоматическое поддержание в накачанной бескамерной шине колеса автомобиля давления сжатого воздуха, соответствующего техническим условиям ее эксплуатации. Оно представляет собой встроенный в колесный диск баллон высокого давления для сжатого воздуха,...
Предыдущий патент: Узел поглощающего аппарата для железнодорожного вагона (варианты), корпус для узла поглощающего аппарата и способ сборки узла поглощающего аппарата (варианты)
Следующий патент: Способ управления тепловым режимом планеты земля
Случайный патент: Способ хирургической декомпрессии портального русла при экспериментальном циррозе печени