Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов
Номер патента: 1748
Опубликовано: 15.03.1995
Авторы: Рязанцев Геннадий Константинович, Кокетаев Аскарбек Ильясович, Кремер Олег Григорьевич
Формула / Реферат
1. СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ПЕРЕМЕННОМ ЭЛЕКТРОМАГНИТНОМ ПОЛЕ ТОКОНЕСУЩИХ ПРОВОДОВ, содержащий измерение вектора напряженности электромагнитного поля ориентирующих токонесущих проводов и преобразование его в электрический сигнал, отличающийся тем, что, с целью расширения функциональных возможностей путем определения местонахождения и скорости движения машины на маршруте, в токонесущих проводах создают стоячую электромагнитную волну, затем одновременно с замером вектора напряженности в одной точке электромагнитного поля производят замер вектора напряженности в другой точке, смещенной относительно первой по направлению движения машины на расстояние, меньшее длины стоячей волны, преобразуют векторы напряженности в электрические сигналы, определяют алгебраическую сумму и отношение этих сигналов в двух названных точках вдоль оси движения, анализируют их и, когда сумма сигналов равна нулю, фиксируют узел стоячей волны вдоль оси движения, формируя при этом импульсы, по числу которых дискретно определяют расстояние, пройденное машиной и ее местоположение на маршруте, по частоте следования импульсов определяют среднюю скорость движения и по соотношению величин сигналов определяют, положение машины между узлами стоячей волны, а по скорости изменения этого соотношения - текущую скорость движения.
2. Способ по п. 1, отличающийся тем, что, с целью повышения надежности определения местоположения самоходной машины между узлами стоячей волны, замеряют абсолютные значения первого и второго по ходу движения сигналов, при первом сигнале больше второго определяют отношение второго сигнала к первому и по величине этого отношения находят положение маишины в диапазоне от нуля до половины длины стоячей волны, а при первом сигнале меньше второго определяют отношение первого сигнала ко второму и по величине этого отношения находят положение машины в диапазоне длины стоячей волны от половины до полной ее длины.
Текст
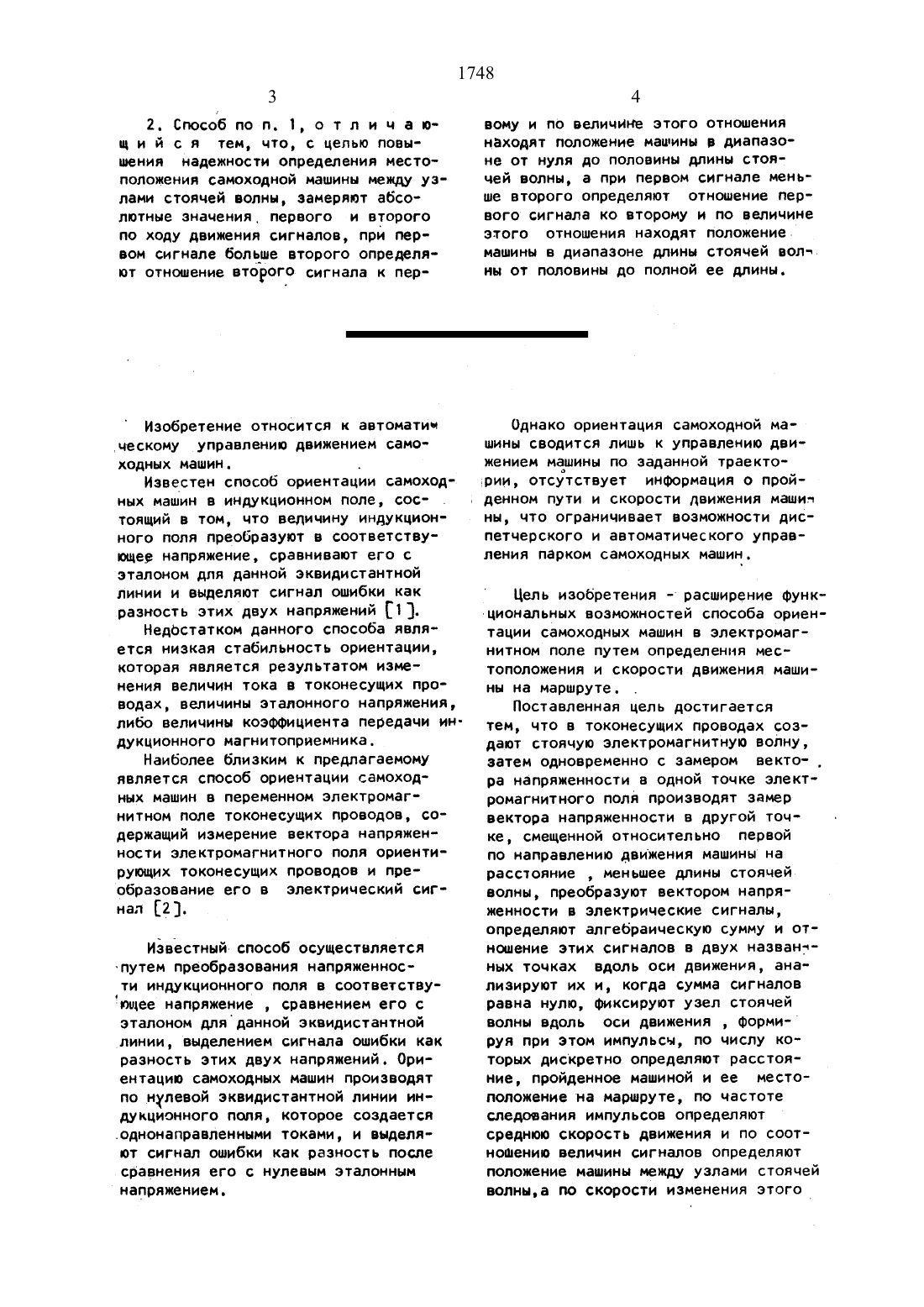
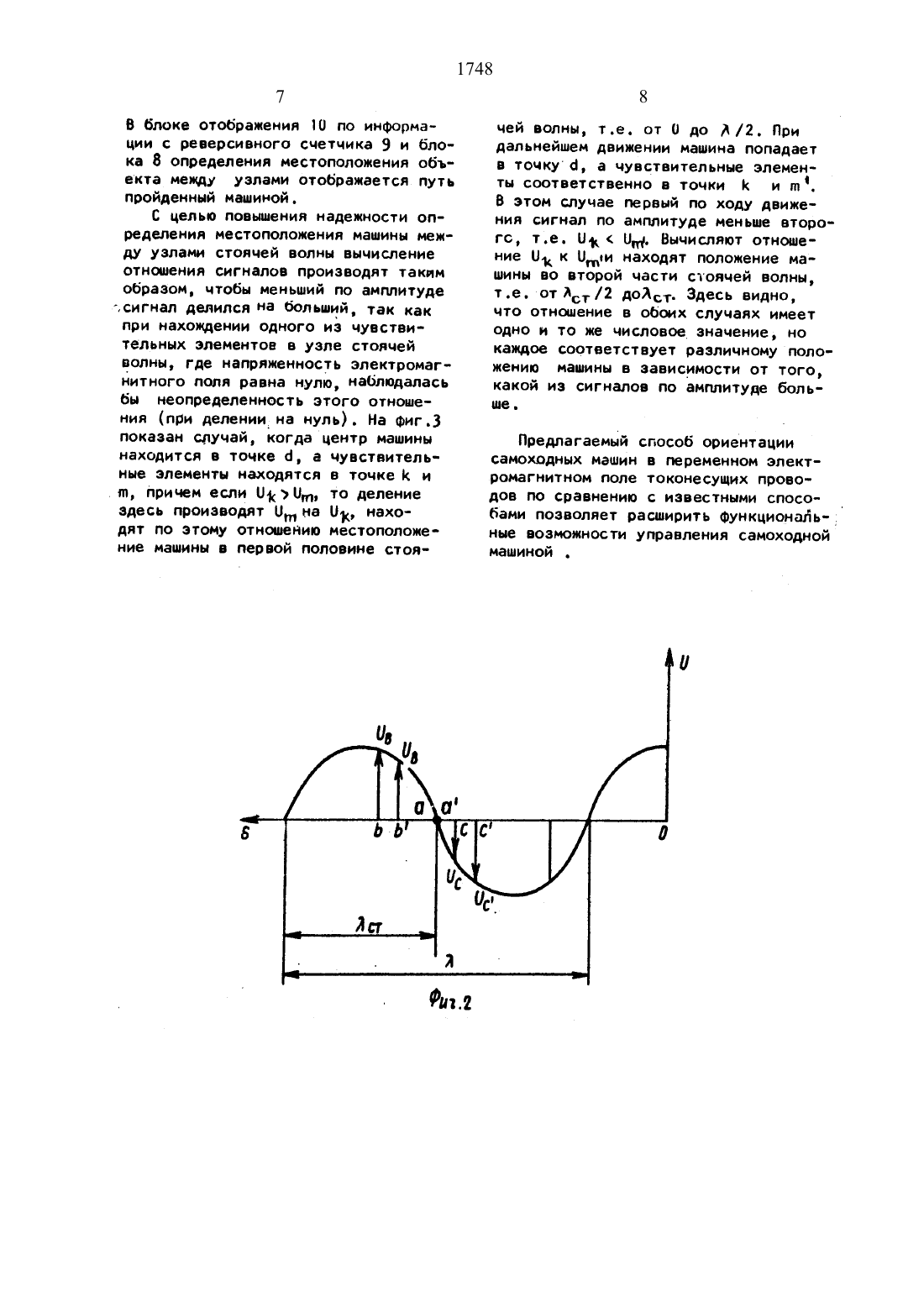
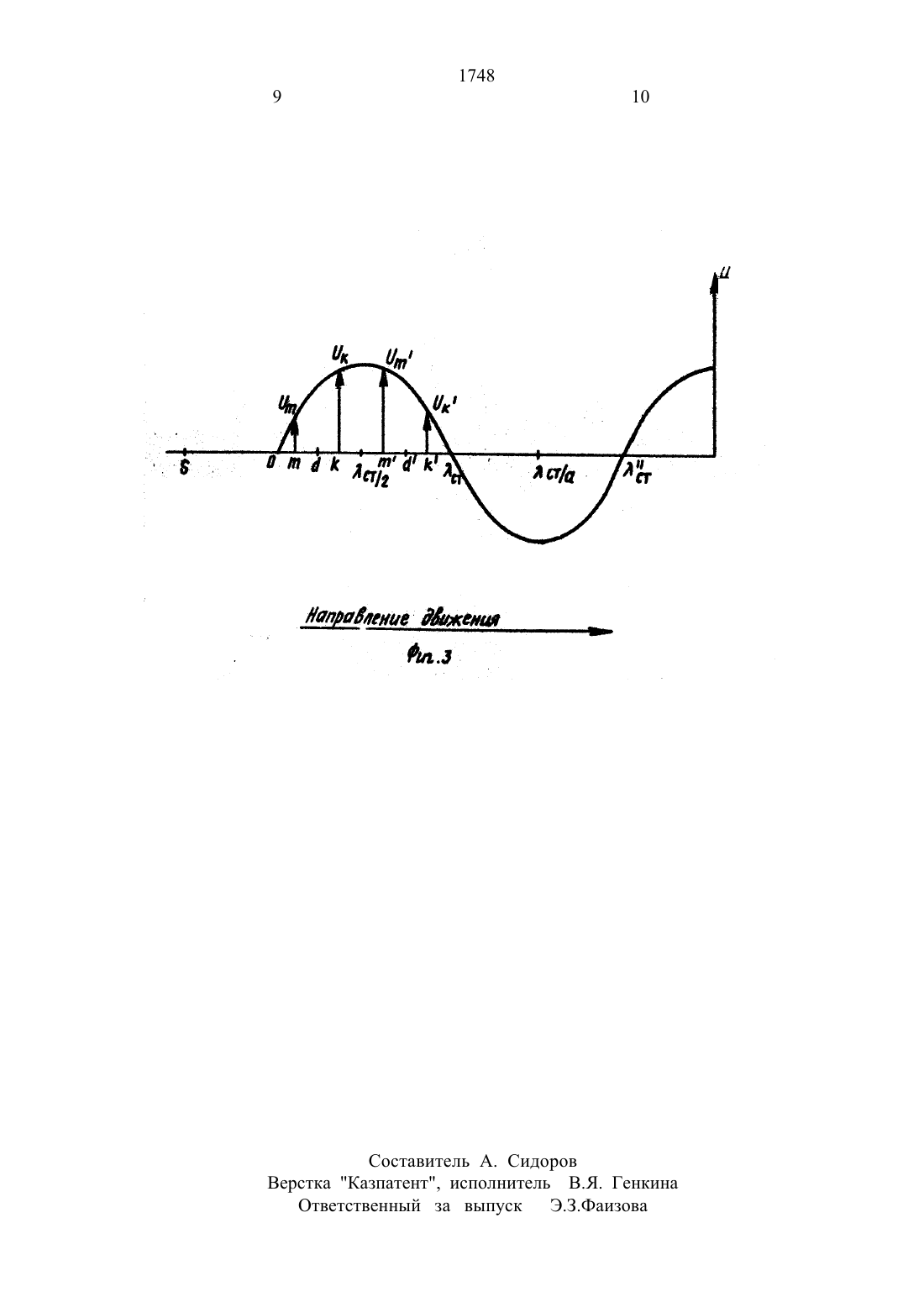
НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО ПРИ КАБИНЕТЕ МИНИСТРОВ РЕСПУБЛИКИ КАЗАХСТАН(73) Институт горного дела НАН РК(56) 1. Авторское свидетельство СССР И 312560, кл. А 01 В 69/Од, 1970.2. Авторское свидетельство СССР М 398197, кл. А 01 В 69/Од, 19/1.(51067) 1. сносов ОРИЕНТАЦИИ сАмоХОДНЫХ МАШИН В ПЕРЕИЕННОМ ЭЛЕКТРОМАГНИТНОМ ПОЛЕ ТОКОНЕСУЩИХ ПРОВОДОВ,содержащий измеренде вектора напряженностиэлектромагнитного поля ориентирующих токонесущих проводов и преобразование его в электрический сигнал,0 т л и ч а ю щ и й с я тем, что,с целью расширения функциональных ВОЗМОЖНОСТЕЙ ПУТЕМ ОППЕДЭЛВНИЯ МеСТ 0 НЗХОЖДСНИП И СКОРОСТИ ДВИЖЕНИЯ МЭШИНЫ на мдршруте, в токонесущих проводах создают стоячую электромагнитную вол ну, эатем одновременно с замером вектора НЭПВЯЖВННОСТИ В 0 дНОЙ точке электромагнитного поля производят замер вектора напряженности в другой точке, смещенной относительно первой по направлению движения машины на расстояние, меньшее длины стоячей волны, преобразуют векторы напряженности в электрические сигналы, опред. деляют алгебраическую сумму и от- ношение ЭТИХ СИГНЭЛОВ В ДВУХ названНЫХ ТОЧКЭХ ВДОЛЬ ОСИ ДВИЖВНИЯ, анализируют их и, когда сумма сигналов равна нулю, Фиксируют узел стоячей волны вдоль оси движения, Формируя при ЭТОМ ИМПУЛЬСН, ПО ЧИСЛУ КОТОВЫХ ДИСК ретно определяют расстояние, пройденное машиной и ее местоположение на маршруте, по частоте следования импульсов определяют среднюю скорость движения и по соотношению величин сигналов определяютположение машины между узлами стоячей волны, а по скорости изменения этого соотношения текущую скорость движения.2. Способ по п. 1, о т л и ч а ющ и й с я тем, что, с целью повышения надежности определения местоположения самоходной машины между узлами стоячей волны, замеряют абсолютные значения первого и второго по ходу движения сигналов, при первом сигнале больше второго определяют отношение второго сигнала к пер Изобретение относится к автоматич,ческому УПВЭВПЗНИЮ ДВИЖЕНИЗН само ходных машин. .Известен способ ориентации самоходных машин в индукционном поле, состоящий в том, что величину индукционного поля преобразуют в соответствующее напряжение, сравнивают его с эталоном для данной эквидистантной линии и выделяют сигнал ошибки как разность этих двух напряжений Ж.Недостатком данного способа является низкая стабильность ориентации,которая является результатом изменения величин тока в токонесущих проводах, величины эталонного напряжения,либо величины коэффициента передачи индукционного магнитоприемника.Наиболее близким к предлагаемому является способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов, содержащий измерение вектора напряженности электромагнитного поля ориентиРУЮЩИХ токонесущих проводов и преобразование его в электрический сигнал 2.-путем преобразования напряженности индукционного поля в соответствупщее напряжение , сравнением его с эталоном для данной эквидистантной линии, выделением сигнала ошибки как разность этих двух напряжений. Ориентацию самоходных машин производят по нулевой эквидистантной линии индукционного поля, которое создается однонаправленными токами, и выделяют сигнал ошибки как разность после сравнения его с нулевым эталоннымвому и по величине этого отношения находят положение машины в диапазоне от нуля до половины длины стоячей волны, а при первом сигнале меньше второго определяют отношение первого сигнала ко второму и по величине этого отношения находят положение машины в диапазоне длины стоячей вол-. ны от половины до полной ее длины.Однако ориентация самоходной машины сводится лишь к управлению движением машины по заданной траектоотсутствует информация о прой ны, что ограничивает возможности диспетчерского и автоматического управления парком самоходных машин.Цель изобретения - расширение Функциональных возможностей способа ориентации самоходных машин в электромагнитном поле путем определения местоположения и скорости движения машины на маршруте.Поставленная цель достигается тем, что в токонесущих проводах создают стоячую электромагнитную волну,затем одновременно с замером вектора напряженности в одной точке электромагнитного поля производят замер вектора напряженности в другой точке, смещенной относительно первой по направлению движения машинына расстояние меньшее длины стоячей волны, преобразуют вектором напряженности в электрические сигналы,определяют алгебраическую сумму и отношение этих сигналов в двух назван ных точках вдоль оси движения, анализируют их и, когда сумма сигналов равна нулю, Фиксируют узел стоячей волны вдоль оси движения , Формируя при этом импульсы, по числу которых дискретно определяют расстояние, пройденное машиной и ее местоположение на маршруте, по частоте следования импульсов определяют среднюю скорость движения и по соотношению величин сигналов определяют положение машины между узлами стоячей волны,а по скорости изменения этогоКроме того, замеряют абсолютные ЗНЭЧЕНИЯ ПЗОВОГО И второго ПО ХОДУ движения сигналов, при первом сигнале больше второго определяют отношение второго сигнала к первому и по величине этого отношения находят положение машины в диапазоне от нуля до половины длины стоячей волны, а при первом сигнале меньше второгоЬпределяют отношение первого сигна ла ко второму и по величине этого отношения находят положение машины в диапазоне длины стоячей волны от половины до полной ее длины.На Фиг. 1 изображено устройство, с помощью которого реализуется данный способ на Фиг. 2 и 3 схематическое измерение векторов напряженности электромагнитного поля ориентирующих токонесущих проводовПредлагаемый способ может быть осуществлен с помощью устройства,показанного на Фиг. 1 и состоящего из генератора синусоидальных колебаний 1, ориентирующих проводов 2, чувствительных элементов 3 и Ц, преобразователей 5 и 6 компаратора 7,блока 8 определения местонахождения объекта между узлами, реверсивного счетчика 9, блока отображения 10. Реверсивный счетчик 9 предусмотрен для случая движения машины задним ходом.Вдоль трассы движения самоходной машины прокладывают ориентИРУЮщие провода 2, в которых с помощью подключенного к ним генератора сину соидальных колебаний 1 создают стоячую электромагнитную волну (фиг.2). Производят замер вектора напряженности электромагнитного поля в одной точке пространства (названной первой)по ходу движения машины при помощи чувствительного элемента 3, преобразуют его в соответствующий электрический сигнал при помощи преобразователя 5 ипо этому сигналу ориентируют машину в плоскости, перпендикулярной оси движения. Одновременно с замером в первой точке производят замер во второй точке пространства, смещенной относительно первой на расстояние, меньшее длины стоячей волны дсд.при помощи чувствительного элемента Ц.Расстояние между точками берется меньше длины стоячей волны, посколь 6ку только при этом условии возможно однозначное определение местоположения узла стоячей волны. Преобразуют этот вектор напряженности в электрический сигнал в преобразователе 6. Допустим, что центр самоходной машины находится в точке а(Фиг. 2), чувствительные элемен ты 3 и Ч расположены на равных расстояниях от точки а ПОцПрОд 0 ЛЬНОЙ оси машины и напряженность электромагнитного поля замеряют в точках в и с, в которых установлены соответственно чувствительные элементы 3 и Ц. Напряженности и соответствующиеим преобразованные сигналы имеют значения На и Пс (Фиг. 2). Здесь видно, что эти сигналы имеют противоположные знаки и разную амплитуду,Алгебраическая сумма этих сигналов отлична от нуля и на выходе компаратора 7 не вырабатывается импульс. При дальнейшем движении машина попадает в точку а (Фиг. 2), замер напряженностей рроизводят в точкахв и с. В этом случае Нвжи Чел, по- ж пученные в результате преобразования напряженностей электромагнитного поля, имеют разные знаки, но одинаковую амплитуду. Следовательно,алгебраическая сумма этих сигналов равна нулю, что соответствует прохождению узла стоячей волны, и на выходе компаратора 7 формируется импульс, который поступает на вход реверсивного счетчика 9. В блоке отображения 10 по количеству этих сигналов дискретно фиксируют расстояние, пройденное машиной. По частоте следования этих сигналов определяют среднюю скорость движения машины. для -того, чтобы определить местоположение машины между узлами стоячей волны, в блоке 8 вычисляют отношения сигналов, полученных с преобразователей 5 и 6. Когда центр машины находится в точке а, то это отНошение Рд с ДЗБ. в точке а-Раг 0 с./Ов т.е. это отношение в любой точке между двумя узлами различно. Следовательно, каждой величине Р одноэначно соответствует точка между двумя узлами, положение машины между узлами определяется как 9 ункция этого отношения, т.е. Г(р),тогда текущая скорость машины опре деляется по формуле МЫВ блоке отображения 10 по информации с реверсивного счетчика 9 и блока 8 определения местоположения объекта между узлами отображается путь пройденный машиной.С целью повышения надежности определения местоположения машины между узлами стоячей волны вычисление отношения сигналов производят таким образом, чтобы меньший по амплитудепсигнал делился На больший, так как при нахождении одного из чувствительных элементов в узле стоячей волны, где напряженность электромагнитного поля равна нулю, Наблюдалась бы неопределенность этого отношения (при делении на нуль). На Фиг.3 показан случай, когда центр машины находится в точке 6, а чувствительные элементы находятся в точке К ич т, причем если пиит, то деление здесь производят ина 03, находят по этому отношению местоположение машины в первой половине стоя 1748чей волны, т.е. от 0 до А/2. При дальнейшем движении машина попадает в точкуо а чувствительные элементы соответственно в точки к и т.В этом случае первый по ходу движения сигнал по амплитуде меньше второго, т.е. и Цдь Вычисляют отношение ЦК к Нди находят положение машины во второй части стоячей волны,т.е. отдст/2 додсъ Здесь видно, что отношение в обих случаях имеет одно и то же числовое значение, но каждое соответствует различному положению машины в зависимости от того, какой из сигналов по амплитуде больше.Предлагаемый способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов по сравнению с известными спосо бами поэволяет расширить функциональ ные возможности управления самоходной
МПК / Метки
МПК: A01B 69/04
Метки: электромагнитном, поле, самоходных, проводов, ориентации, токонесущих, способ, переменном, машин
Код ссылки
<a href="https://kz.patents.su/5-1748-sposob-orientacii-samohodnyh-mashin-v-peremennom-elektromagnitnom-pole-tokonesushhih-provodov.html" rel="bookmark" title="База патентов Казахстана">Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов</a>
Способ изготовления изолированных проводов
Номер патента: 1301
Опубликовано: 15.09.1994
Авторы: Черневский Игорь Николаевич, Батаков Валерий Павлович, Заславский Владимир Натанович, Солодская Надежда Ивановна
МПК: H01B 13/14
Метки: изолированных, способ, проводов, изготовления
Формула / Реферат:
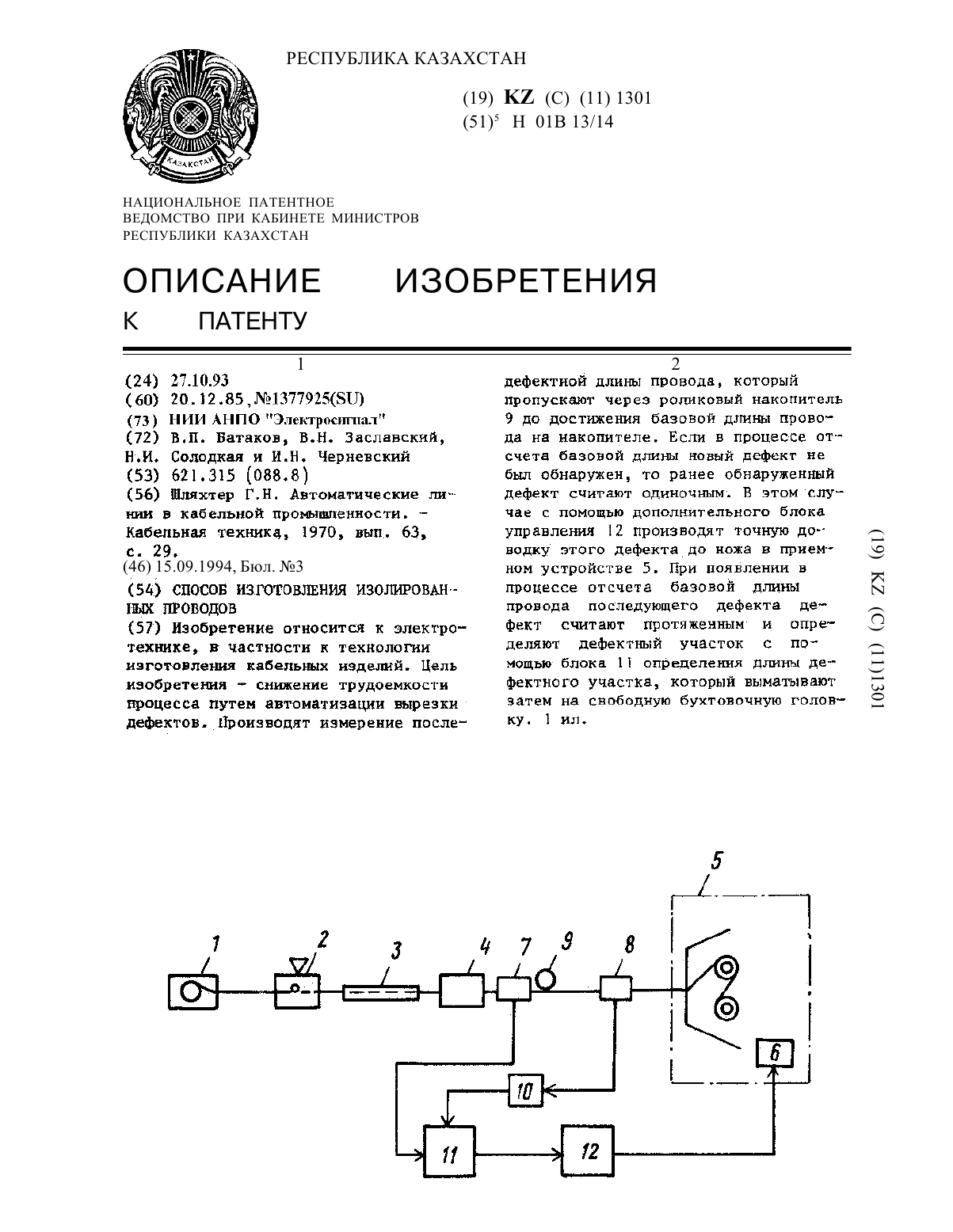
Изобретение относится к электротехнике, в частности к технологии изготовления кабельных изделий. Цель изобретения — снижение трудоемкости процесса путем автоматизации вырезки дефектов. Производят измерение последефектной длины провода, который пропускают через роликовый накопитель 9 до достижения базовой длины провода на накопителе. Если в процессе отсчета базовой длины новый дефект не был обнаружен, то ранее обнаруженный дефект считают...
Устройство для изготовления изолированных проводов
Номер патента: 721
Опубликовано: 15.03.1994
Авторы: Батаков Валерий Павлович, Черневский Игорь Николаевич, Солодкая Надежда Ивановна
МПК: H01B 13/14
Метки: проводов, устройство, изолированных, изготовления
Формула / Реферат:
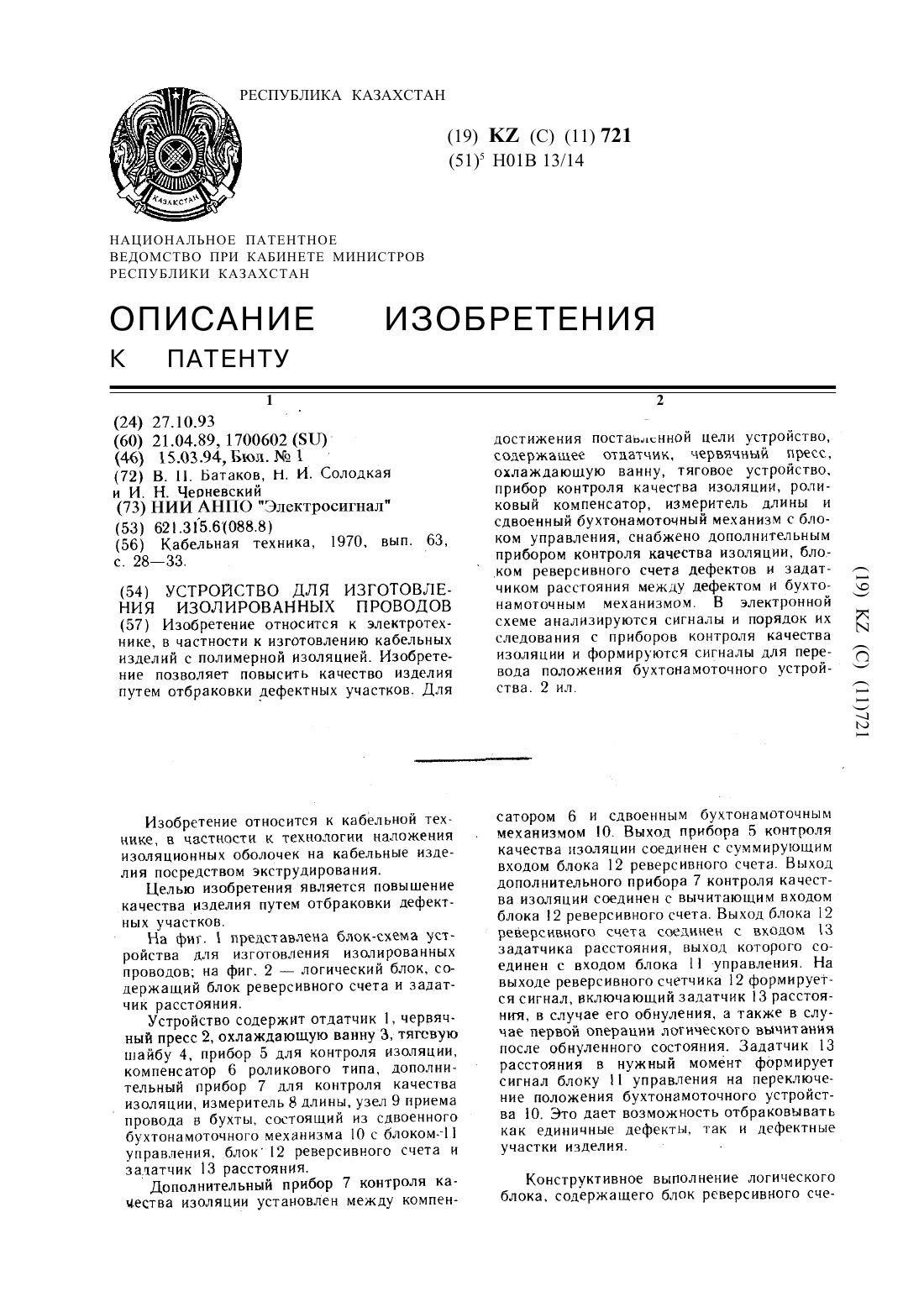
Изобретение относится к электротехнике, в частности к изготовлению кабельных изделий с полимерной изоляцией. Изобретение позволяет повысить качество изделия путем отбраковки дефектных участков. Для достижения поставленной цели устройство, содержащее отдатчик, червячный пресс, охлаждающую ванну, тяговое устройство, прибор контроля качества изоляции, роликовый компенсатор, измеритель длины и сдвоенный бухтонамоточный механизм с блоком управления,...
Устройство для испытания электрической прочности изоляции проводов
Номер патента: 708
Опубликовано: 15.03.1994
Автор: Солодская Надежда Ивановна
МПК: G01R 31/14
Метки: устройство, проводов, изоляции, электрической, испытания, прочности
Формула / Реферат:
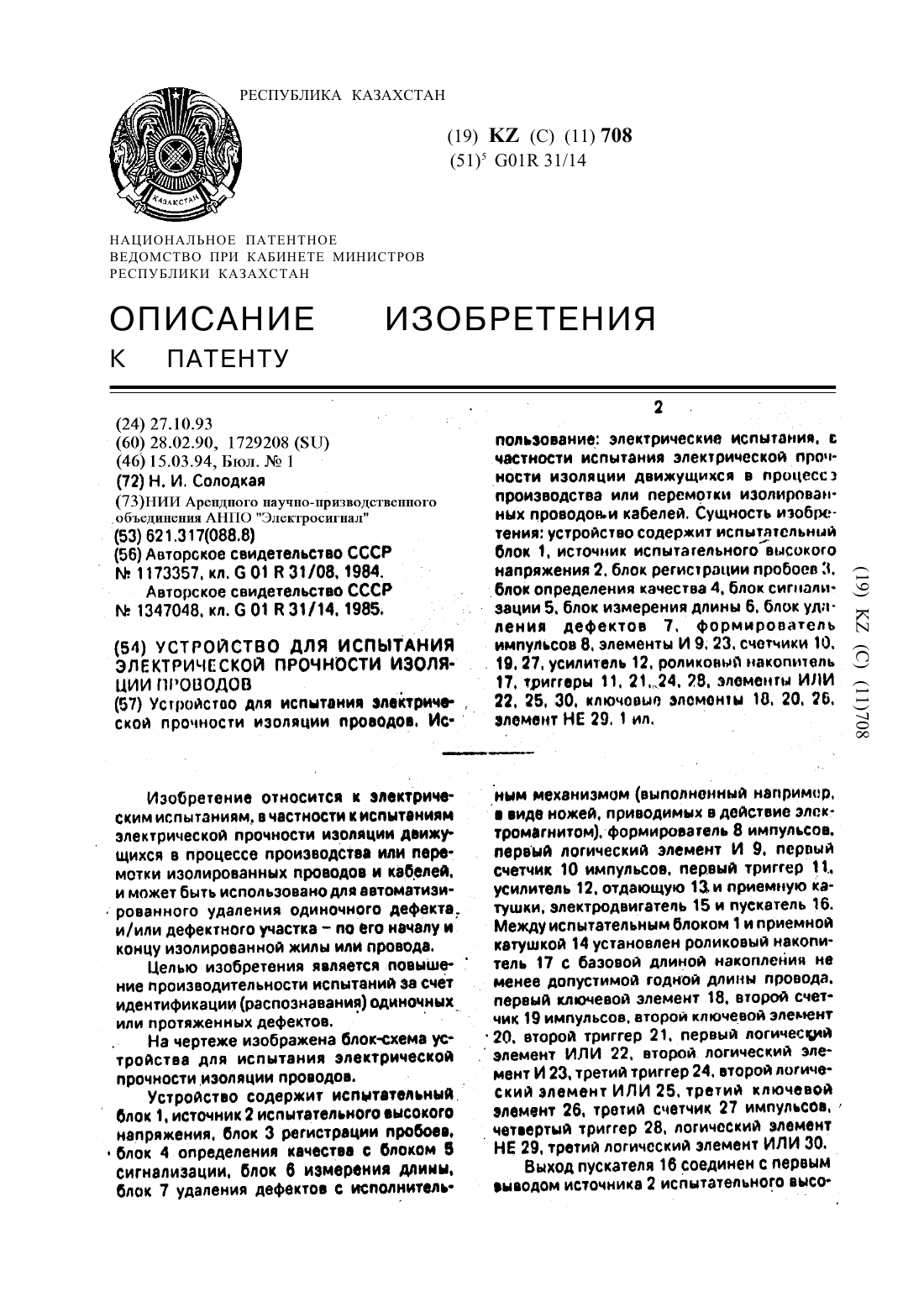
Устройство для испытания электрической прочности изоляции проводов. Использование: электрические испытания, с частности испытания электрической прочности изоляции движущихся в процесса производства или перемотки изолированных проводов и кабелей. Сущность изобретения: устройство содержит испытательный блок 1, источник испытательного высокого напряжения 2, блок регистрации пробоев 3, блок определения качества 4, блок сигнализации 5, блок измерения...
Способ изготовления проводов с отметкой мест дефектов
Номер патента: 719
Опубликовано: 15.03.1994
Автор: Трубин Олег Юрьевич
МПК: H01B 7/36
Метки: способ, изготовления, мест, проводов, дефектов, отметкой
Формула / Реферат:
Изобретение относится к электротехнике, в частности к кабельной технике, а именно к способам отметки мест дефектов кабельных изделий. Цель изобретения - повышение производительности процесса-путем исключения остановок оборудования за счет сохранения целостности изделия в процессе его изготовления. На жилу наносят изоляцию, контролируют качество провода и при появлении дефекта деформируют участок провода с дефектом периодическим изгибанием...
Электрод для испытания изоляции проводов
Номер патента: 702
Опубликовано: 15.03.1994
Авторы: Трубин Олег Юрьевич, Стеблевская Людмила Алексеевна
МПК: G01R 31/08
Метки: испытания, изоляции, проводов, электрод
Формула / Реферат:
Изобретение относится к испытаниям электрической прочности изоляции движущихся в процессе производства ленточных проводов и может быть использовано для обнаружения дефектов изоляции ленточных проводов при их изготовлении и перемотке, в том числе точечных микродефектов изоляции между отдельными токопроводящими жилами. Цель изобретения - повышение точности обнаружения дефектов изоляции ленточных проводов в результате выявления микродефектов...
Предыдущий патент: Электродный водонагреватель
Следующий патент: Способ автоматического управления движением самоходных транспортных машин и устройство для его осуществления
Случайный патент: Многослойная фибробетонная панель