Способ автоматического управления движением самоходных транспортных машин и устройство для его осуществления
Номер патента: 1749
Опубликовано: 15.03.1995
Авторы: Аспандияров Адиль Турсунович, Кремер Олег Григорьевич, Кокетаев Аскарбек Ильясович
Формула / Реферат
1. Способ автоматического управления движением самоходных транспортных машин, включающий создание стоячей электромагнитной волны вдоль ориентирующих проводов, выделение падающей и отраженной электромагнитных волн,замер их параметров стоячей водный определение местоположения машины по расстоянию от узлов и пучностей, отличающийся тем, что, с целью повышения надежности определения местоположения машины на маршруте, после выделения падающей и отраженной электромагнитных волн измеряют непрерывно в процессе движения машины сдвиги фаз отраженной волны относительно падающей преобразуют эти сдвиги фаз в соответствующие им напряжения, по величине которых фиксируют узлы или пучности стоячей электромагнитной волны и определяют местоположение самоходной машины между следующими друг за другом узлами или пучностями, перемножают значения амплитуд падающей и отраженной электромагнитных волн для этого местоположения машины, сравнивают это произведение с эталонным значением для данного местоположения и по их разности определяют отклонение машины от траектории движения.
2. Устройство для автоматического управления движением самоходных транспортных машин, содержащее генератор синусоидальных колебаний, соединенный с ориентирующими проводами, рефлектометр с измерительными линиями падающей и отраженной волны, выходы которых соединены с входами компаратора, выход которого соединен с первым входом реверсивного счетчика, который соединен выходом с первым входом блока отображения, отличающееся тем, что оно снабжено фазометром, блоком сравнения, блоком выбора эталона, блоком управления и умножителем, который первым входом соединен с измерительной линией падающей волны, вторым входом - с измерительной линией отраженной волны, а выходом - с первым входом блока сравнения, на второй вход которого подсоединен выход блока выбора эталона, который соединен входом с первым выходом блока отображения, фазометр соединен первым входом с измерительной линией падающей волны, а вторым - с измерительной линией отраженной волны, первым выходом подключен к реверсивному счетчику, а вторым выходом - к второму входу блока отображения, который вторым выходом соединен с блоком управления, второй вход которого соединен с выходом блока сравнения.
Текст
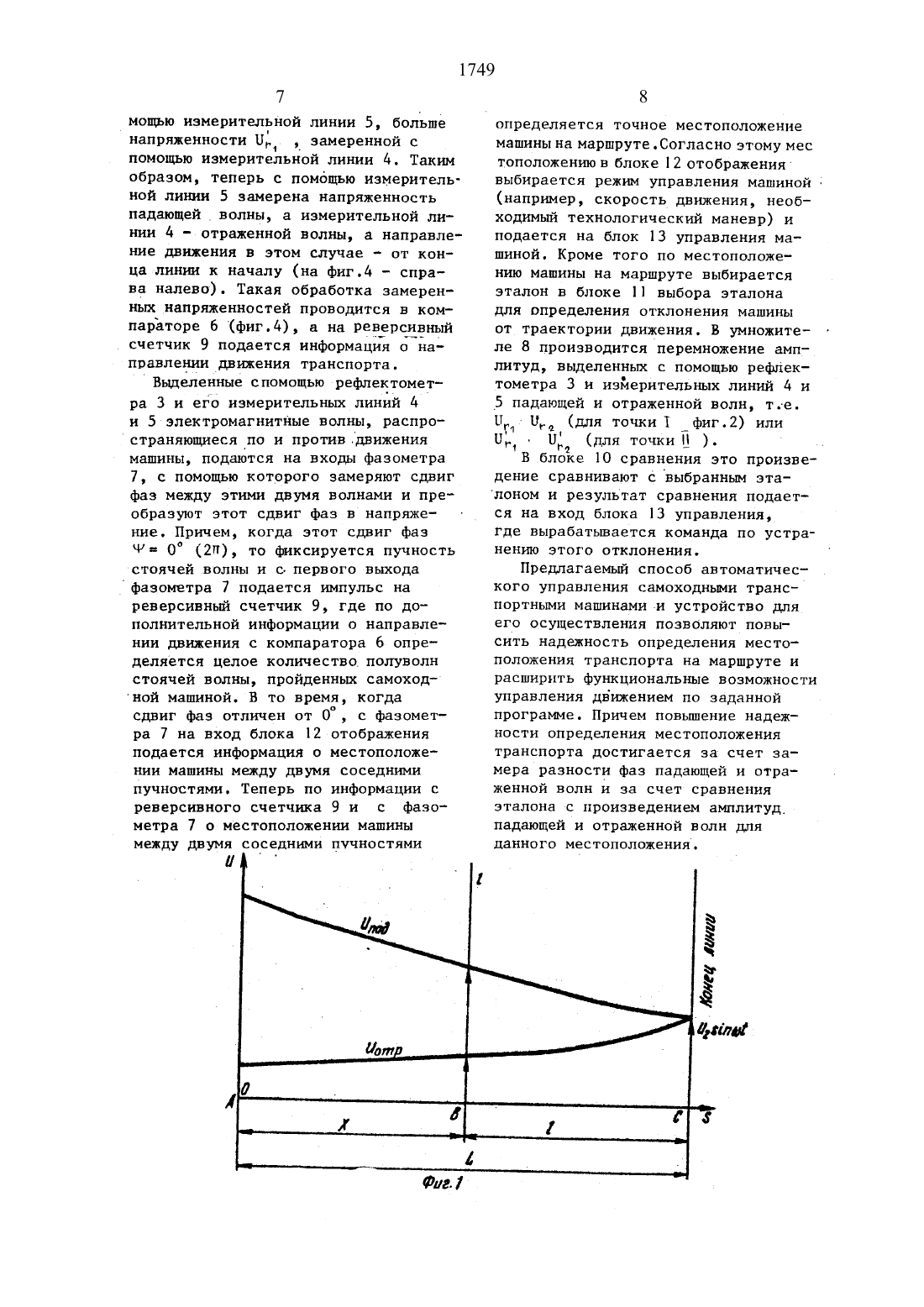
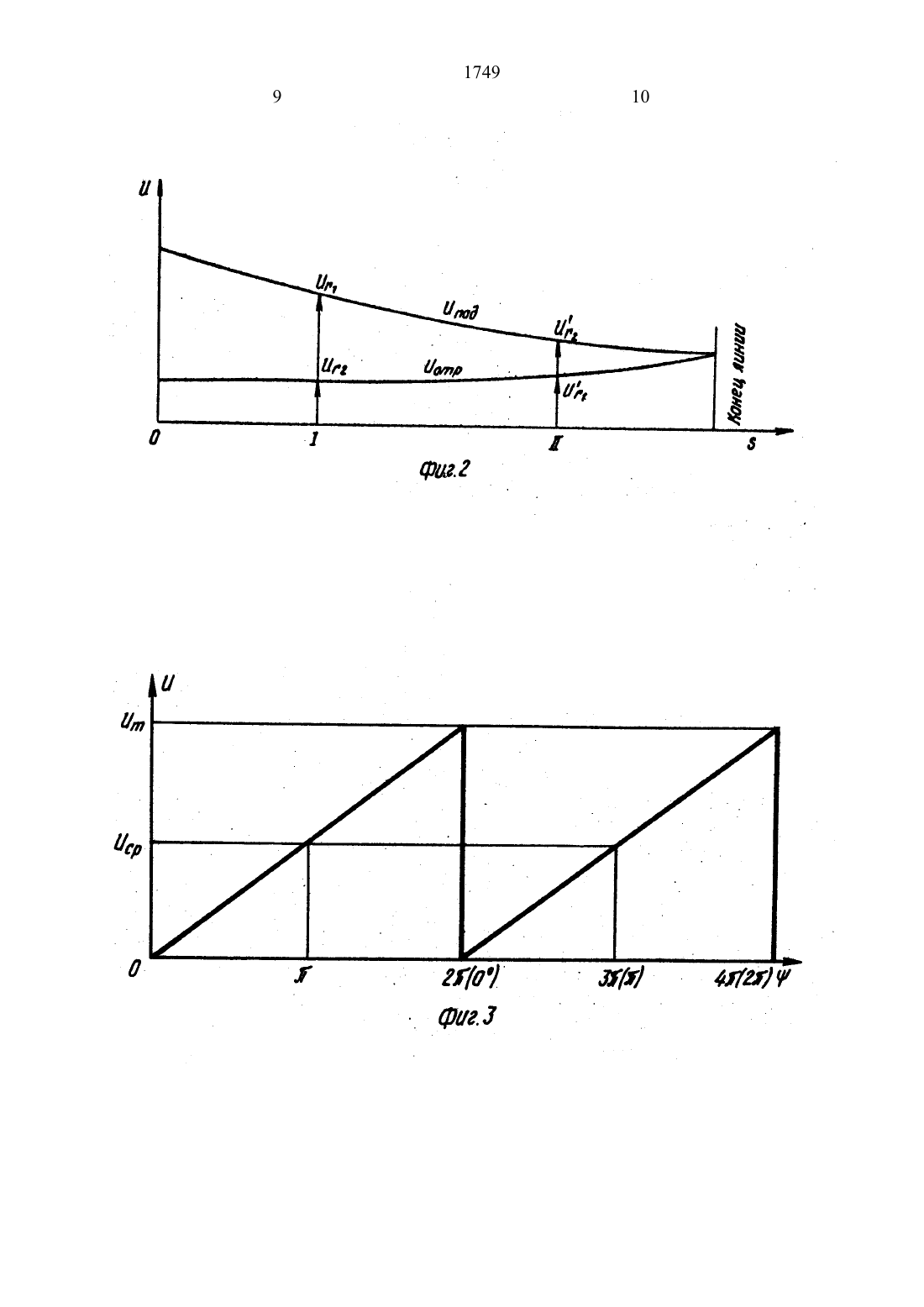
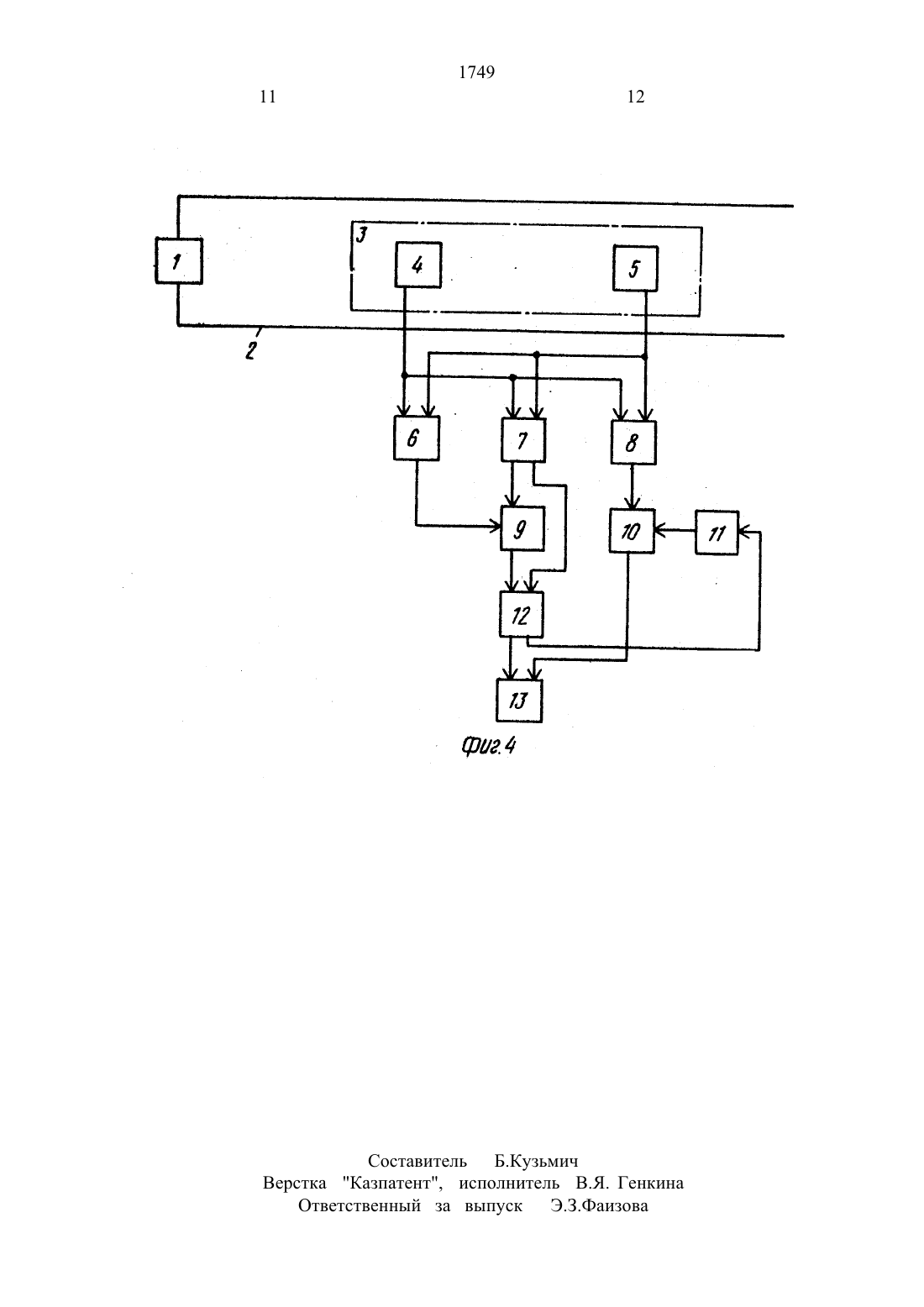
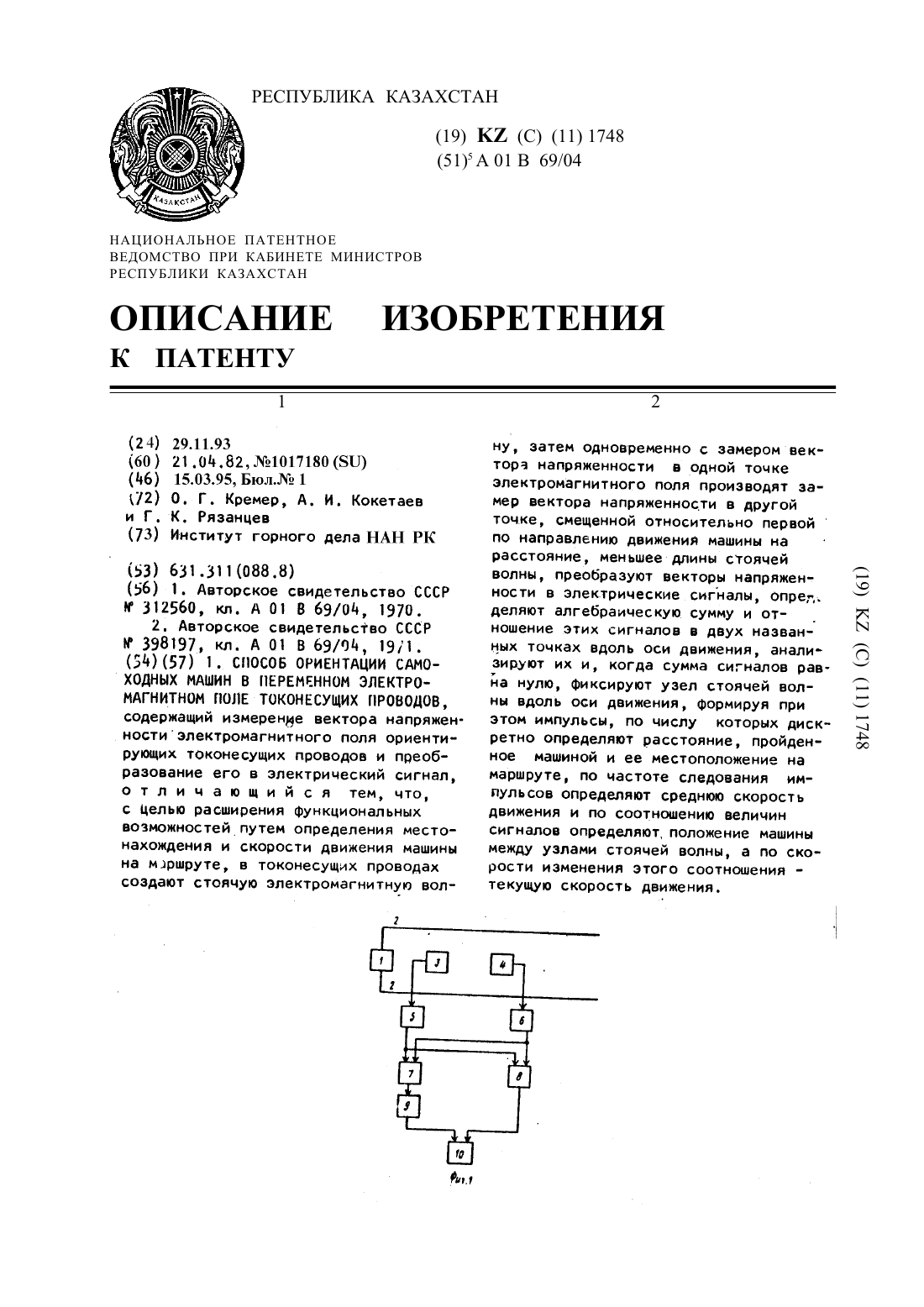
Изобретение относится к автоматическому управлению двиением самоходных транспортных машин, Целью изобретения является повышение надежности определения местоположения машины на маршруте. .На фиг.1 и 2 показаны эпюры пада ющей и отраженной волн на фиг.3 характеристикафазометра на фиг.4 схема устройства, реализующего способ автоматического управления движением транспортнъш машин.данный способ-основан на известном явлениивлинейныж.электрических цепях. из него следует, что стоячие волны получаются в результате сложения падающей и отраженной волн,каждая из которых бегущая. В процессе распространения фаза бегущей волны изменяется пропорционально расстоянию распространения и коэффициенту фазьтр. Допустим, что падающая волна напряжения меет в конце линии амплитуду На и Фазуц)с,тж.щящзпщ(ш.фш.1 ъ Тогдана расстояни С от конца линии мгновенное значене напряжения Ирев опережает по фазе значение В аВ отраженной волне наоборот наблю дается отставание по фазе на 1 ВВ,и, так как Чд Н, 0 то в рассматриваемом сеъении Й мгновенное зна очение отраженной волны равно Петр - П- вйпидс рЕ ) т.е. сдвиг фаз между падающей и отраженной волнами равен ч 2 ргде .р- Е - коэффициент фазы, 4 С расстояние от конца линии. Коэффициент 2 указывает на то, что разность фаз между падающей и отраженной волнами вознижза счет разности путей, пройденных падающей н отраженной волнами, которая и равна удвоенному расстоянию от конца ли нии. Подставляя значения р , получа ем р- А Отсюда видно, что при Е 5 Ас Е.Ат Ф А 2 2, при ГО Ч 0,при Ч 1 Т.Таким образом, изменение сдвига фаз между падающей и отраженной волнами от О до 2 П соответствует изменению напряженности стоячей волны от Пс до О и опять до Пдс когда сдвиг фаз У О(2 П), то это соответствует пучности стоячей волны, когда Ч 80,- соответствует узлу стоячей волны. Значения О Ч 180 и 18 ОЧ 360 соответствуют точкам между двумя соседним пучностями стоячей волны. Преобразование этого сдвига фаз в напряжене производится фазометром независимо от амплитуды подаваемых на его вход сигналов. преобразован эти сигналы в напряжение,оченвточноопределяютместоположение транспортаъиамаршруте.Характеристнка. применяемыхв настоящеевремяфщзометров показана на фиг З . Здесь изменение фазы от 0 до 80 соответствует прохождени транспортом расстояния от пучности до узла стоячей волны, а изменение от 180 до З 60 - от узла до пучности. По величине напряжения и соответствующему сдвигуфаз можно судить о местоположении транспорта между пучностями стоячей волны, втом случае, когда напряжение И 0 или П Н фиксируют пучности стоячей волны (сдвиг фаз 9 0 3605-п),при П НеР (сдвиг фаз ч 180- п) фиксируютузелстоячейволны.Такимобразом сдвиг фаз используют для определения местоположения транспорта на маршруте.Этот способ отличается от существующцх тем, что надежность определения местоположения транспорта на маршруте достигается за счет замера сдвига фаз падающей и отраженной волн, а точность замера этого сдвига не зависит от амплитуд волн. Причем этот сдвиг преобразуется в линейно нзменяющееся напряжение, каждое конкретное значение-которого соответствует конкретному сдвигу фаз, т.ец конкретному местоположени вдоль линииОднако определение отклонения транспорта от траектории двиения в силу неоднородности электромагнитного поля стоячей волны затруднено. Выделение падающей и отраженной волн(обе эти волны бегущие) также не позволяет надежно-определять отклонение -транспорта от траектории движения, так как при распростране 5нии электромагнитных волн вдоль токонесущих проводов происходит их затухание. Наприер, если в начале линии напряжение П, (фиг.1), то на расстоянии Х (точка В, фиг.1) от начала линии падающая и отраженная волны имеют значенияи отраженной волн вдоль линии меняется и зависит от величины Х , что подтверждается следующимНо есть параметр электромагнитным колебаний стоячей волны, которьй неизменен для всей линии. Этот параметр произведение падающей и отраженной волн. Действительно, для точки Ао 2 ьы И Чдф Нпчкд Но шт в ц е 111 е В У еах пыток) 9 тьа Н Нотг дне 1 е Я 3 С он. юн. 21.4 мы Пир И не и.Как видно, произведение амплитуд падающей и отраженной волн вдоль всей линии одинаково. Следовательно,сравнив это произведение с эталонным значением для данного местоположения, по их разности можно определить отклонение машины от траектории движения. 4 Устройство для автоматическогоуправления двиением транспортных машин содержит генератор 1 синусоидальных колебаний, соединенный с ориентирующими проводами 2, рефлектометр (двунаправленный ответвитель) 3 с измерительньши линиями 4 падающей и 5 отраженной волн, компаратор 6, фазометр 7, умножитель 8,реверсивный счетчик 9, блок 10сравненияблок 11 выбораэталонаблок 12 отражениях 1 блок К 3 управления. Вдоль трассы движения самоходной машины прокладывают ориентирующие провода 2, в которых с помощью подключенного к ним генератора сину соидальных колебаний создают стоя чую электромагнитную волну. На самоходной машиие установлен рефлектометр 3, состоящий из двух измерительных линий 4,5 и способный разделять электромагнитные волны, распространяющиеся по и против движения самоходной машины. Напряженности электромагнитных волн, выделенные с помощью рефпектометра замеряются измерительньми линиями 4 и 5 и замеренные.напряженности подаются на входы компаратора 6, фазометра 7 и умножителя 8. В компаратора 6 по замеренным напряженностям электромагнитныщ волн, распространяющихся пои против движения машины, определяют направления двиения. Допустим, что не известно направление движения самоходной машины, но известно, что измерительная линия 4 находится в задней, а измерительная линия 5 в передней части машины, т.е с помощью измерительной линии 4 замеряют напряженность поля волны, распространяющейся по ходу движения самоходной машины, а с помощью измерительной линии 5- напряженность поля волны,распространяющейся против направления движения самоходной машины. При расположении измерительных-линий4 и 5, показанном на фиг.4, напряженность поля, замеренная с помощью измерительной линии 4 соответствуетпо амплитуде П 1(фиг.2) а с помощью измерительной линии 5 - ПГ 1. Так как П,12 Дт то с помощью измерительной пинии 4 определена напряженность падающей, а с помощью измерительной линии 5 - напряженность отраженной волны. В то же время известно,как расположены измерительные линии 4 и 5 двунаправленного ответвители(рефлектометра) 3 на самоходной машине. Следовательно, можно определить,что машина движется от начала линии к концу (на фиг.4 слева направо). Если самоходная машина движется в противоположном направлении, т.е. измерительные линии 4 и 5 на фиг.4 меняются местами, то тогда напряженность п 2 (фиг.2) замеренная с по 1749мощъю измерительной линии 5, больше напряженности Н, , замеренной с помощью измерительной линии 4. Таким образом, теперь с помощью измерительной лини 5 замерена напряженность падающей волны, а измерительной линии 4 - отраженной волны, а направление движения в этом случае - от конца линии к началу (на фиг.4 справа налево). Такая обработка замеренных напряжениостей проводится в компаратора 6 (фиг.4), а на реверсивный счетчик 9 подается информация 6 Ьа 4 правлении движения транспорта. Выделенные спомощью рефлектометра 3 и его измерительны линий 4 и 5 электромагнитные волны, распро страняющиеся по и против движениямашины, подаются на входы фазометра 7, с помощью которого замеряют сдвиг фаз между этими двумя волнами и преобразуют этот сдвиг фаз в напряжение. Причем, когда этот сдвиг фаз Ч 0 (2 П) то фиксируется пучность стоячей волны и о первого выходареверсивный счетчик 9, где по до полнительной информации о направлении двиения с компаратора 6 определяется целое количество.полуволн стоячей волны, пройденныш самоход ной машиной. В то время, когдасдвиг фаз отличен от 0, с фазометра 7 на вход блока 12 отображения подается информация о местоположении машины между двумя соседними пучностями. Теперь по информации с реверсивного счетчижа 9 и с фазометра 7 о местоположении машинымежду ДВУМЯ СОСЕЦНИМИ ЦУЧНОСТЯМИ и .машины На маршруте . СОГЛЗСНО ЭТОМУ МЕС ТОПОЛОЖЕНШО В бЛОКЕОТОРЗЖЕНИЯвыбирается режи управления машинойд(например, скоростьдвижения необходимый технологический маневр) и подается на блок 13 управления машиной. Кроме того по местоположению машины на маршруте выбирается эталон в блоке 11 выбора эталона для определения отклонения машины от траектории движения. В умножителе 8 производится перемножение амплитуд, выделенных с помощью рефлектометра 3 и измерительных линий 4 и 5 падающей и отраженной волн, Тые. Тгд НМ (для точки 1 фиг.2) или П ПЬ (шт пшкиц ЪВ блоке 10 сравнения это произве дение сравнивают с выбранным эта лоном и результат сравнения подает ся на вход блока 13 управления,где вырабатьшается команда по устранению этого отклонения. Предлагаемй способ автоматического управления самоходными транспортньши машинами и устройство для его осуществления позволяют повысить надежность определения местоположения транспорта на маршруте и расширить функциональне возможности управления движением по заданной программе. Причем повышение надежности определения местоположениятранспорта достигается за счет замера разности фаз падающей и отраженной волн и за счет сравнения эталона с произведением амплитуд. падающей и отраженной волн для данного местоположения)
МПК / Метки
МПК: A01B 69/04
Метки: транспортных, машин, осуществления, самоходных, устройство, управления, движением, способ, автоматического
Код ссылки
<a href="https://kz.patents.su/6-1749-sposob-avtomaticheskogo-upravleniya-dvizheniem-samohodnyh-transportnyh-mashin-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Казахстана">Способ автоматического управления движением самоходных транспортных машин и устройство для его осуществления</a>
Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов
Номер патента: 1748
Опубликовано: 15.03.1995
Авторы: Кремер Олег Григорьевич, Рязанцев Геннадий Константинович, Кокетаев Аскарбек Ильясович
МПК: A01B 69/04
Метки: способ, машин, проводов, электромагнитном, переменном, токонесущих, самоходных, ориентации, поле
Формула / Реферат:
1. СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ПЕРЕМЕННОМ ЭЛЕКТРОМАГНИТНОМ ПОЛЕ ТОКОНЕСУЩИХ ПРОВОДОВ, содержащий измерение вектора напряженности электромагнитного поля ориентирующих токонесущих проводов и преобразование его в электрический сигнал, отличающийся тем, что, с целью расширения функциональных возможностей путем определения местонахождения и скорости движения машины на маршруте, в токонесущих проводах создают стоячую электромагнитную волну,...
Способ управления электрогидромеханическим тормозом комбайна и устройство для его осуществления
Номер патента: 1622
Опубликовано: 15.12.1994
Авторы: Каменский Валерий Павлович, Тарасов Виктор Викторович, Парфенов Вальтер Васильевич, Белик Михаил Николаевич, Кром Федор Юрьевич, Кармалыга Валерий Петрович
МПК: E21C 29/20
Метки: тормозом, электрогидромеханическим, устройство, управления, осуществления, комбайна, способ
Формула / Реферат:
Способ управления электрогидротормозом комбайна, заключающийся в задании нулевой скорости движения комбайна и значения тока двигателей системы подачи и отключении тормоза при отключении скорости движения комбайна от рулевого значения и при превышении заданного значения тока двигателей системы подачи, а также измерении частоты вращения двигателей системы подачи и включении тормоза при равенстве частоты вращения двигателей системы подачи и...
Устройство автоматического управления загрузкой двухкамерной сепараторной мельницы
Номер патента: 245
Опубликовано: 30.12.1993
Авторы: Байдавлетов Тимур Каримович, Адамбаев Мурат Джамантаевич
МПК: B02C 25/00
Метки: автоматического, сепараторной, устройство, двухкамерной, загрузкой, мельницы, управления
Формула / Реферат:
Изобретение относится к области помола материалов с объединенной сепарацией измельченного продукта и может быть использовано, например, в промышленности строительных материалов, химической, металлургической и других отраслей производства и является усовершенствованием устройства автоматического управления загрузкой двухкамерной мельницы по авторскому свидетельству № 501048. Цель - повышение качества управления. Устройство автоматического...
Способ управления процессами в трубопроводной запорно-регулирующей арматуре, устройство для его осуществления
Номер предварительного патента: 1441
Опубликовано: 15.12.1994
Автор: Ермеков Танаткан Зинорович
МПК: F01D 17/20, F16K 31/12
Метки: трубопроводной, способ, управления, устройство, осуществления, процессами, запорно-регулирующей, арматуре
Формула / Реферат:
Способ управления трубопроводной запорно-регулирующей арматурой и устройство для его осуществления. Изобретение относится к запорной арматуре, в частности к управлению арматурой с пневмо - и гидроприводом. Способ управления установленной в основном трубопроводе запорной арматурой с поршневым пневмо- или гидроприводом осуществляется с помощью транспортируемой по основному трубопроводу среды. Способ состоит в том, что из основного трубопровода...
Способ автоматического распределения воды между поливными участками и устройство для его осуществления
Номер предварительного патента: 727
Опубликовано: 15.06.1994
Автор: Арст Виктор Хейнрихович
МПК: A01G 25/16
Метки: между, поливными, автоматического, воды, участками, распределения, способ, осуществления, устройство
Формула / Реферат:
Изобретение относится к технике и технологии полива на склоновых землях далеко от жилья размещенных садов, ягодников и виноградников. Задача настоящего изобретения состоит в автоматизации распределения воды между поливными участками. Поставленная задача решается тем, что в переключателях потока воды, включающих две и более задвижек, оставляют открытой одну и в каждом последующем узле распределения воды частоту срабатывания привода задают во...
Предыдущий патент: Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов
Следующий патент: Способ Курилова стимулирования прививок древесных культур
Случайный патент: Крепеукладчик