Клещевой захват
Номер инновационного патента: 25935
Опубликовано: 15.08.2012
Авторы: Дейнеко Павел Федорович, Асангалиев Елибек Атрауович, Дейнеко Павел Павлович
Формула / Реферат
Изобретение относится к грузоподъемным устройствам и может быть использовано при строительстве дорог и других наземных сооружений, в частности, для уплотнения поверхностного слоя грунта ударным способом. Задачей, на решение которой направлено данное изобретение, является повышение производитель-ности клещевого захвата. Технический результат, получаемый при осуществлении предлагаемого изобретения заключается в том, что исключается ручной труд при захвате поднимаемого груза и при его освобождении, включая освобождение в поднятом состоянии без снятия нагрузки, а также в возможности его применения для уплотнения грунта за счет использования энергии груза при сбрасывании его с высоты на поверхность грунта и более удобного в эксплуатации. Предложен клещевой захват, содержащий два захвата, имеющие шарнирную связь с обоймой, которые свободным концами периодически взаимодействуют с распорным элементом при закреплении груза, отличающийся тем, что каждый захват связан с обоймой отдельной осью, распорный элемент установлен подвижно в вертикальном направлении и снабжен кривошипно-шатунным механизмом для его перемещения вверх при освобождении груза и противовесом, связанным с кривошипно-шатунным механизмом при перемещении распорного элемента вниз для закрепления груза при его подъеме..
Текст
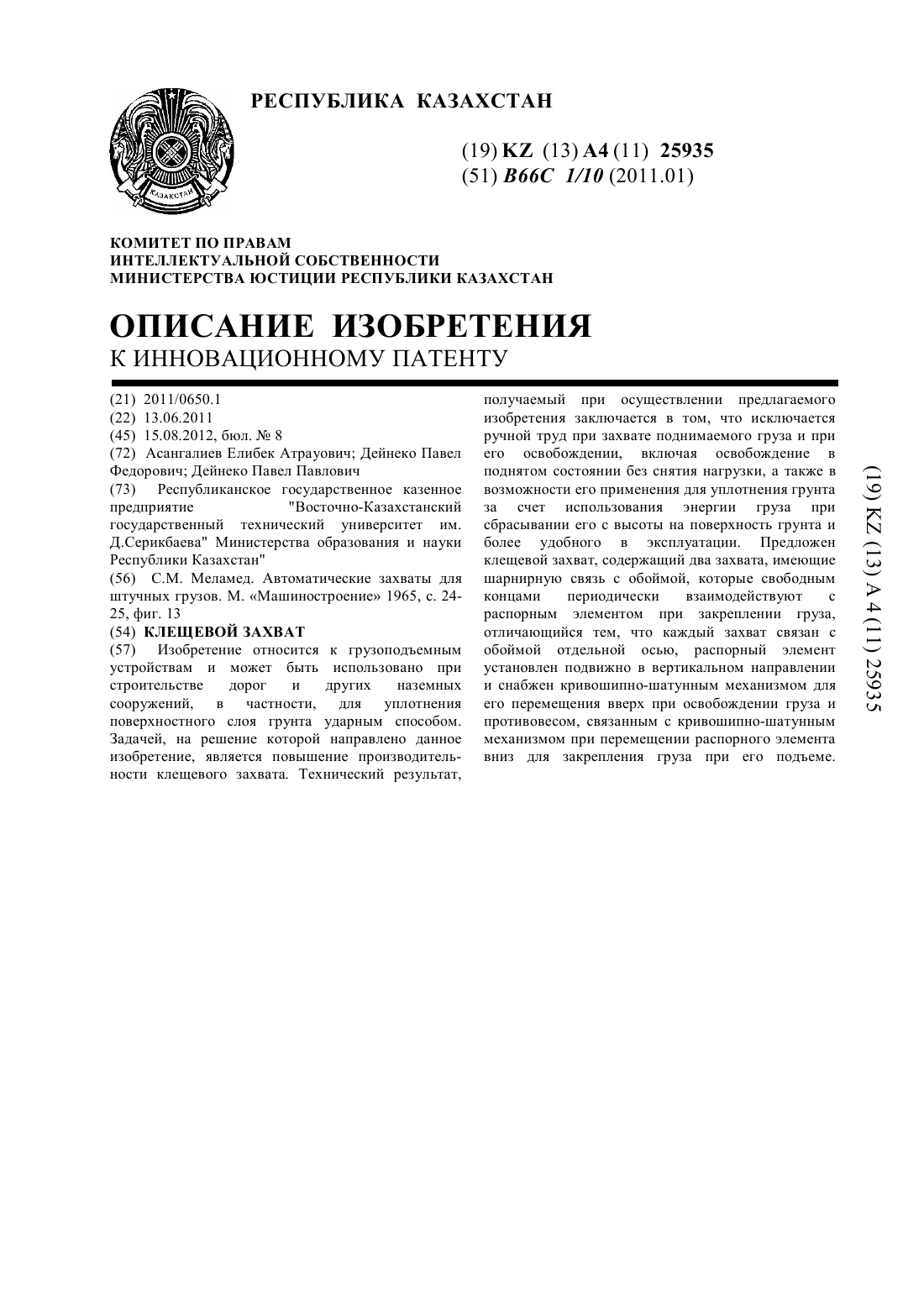
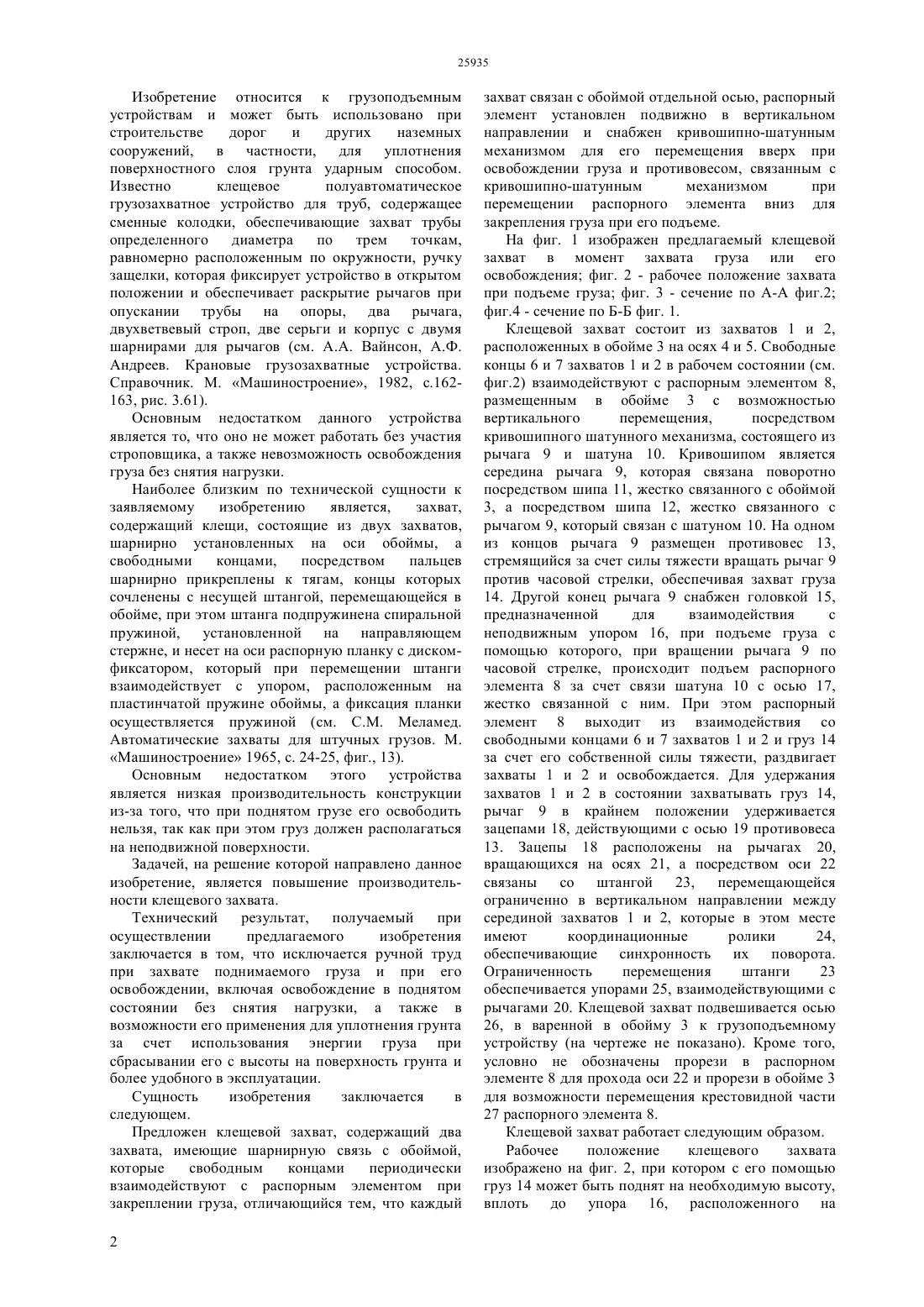
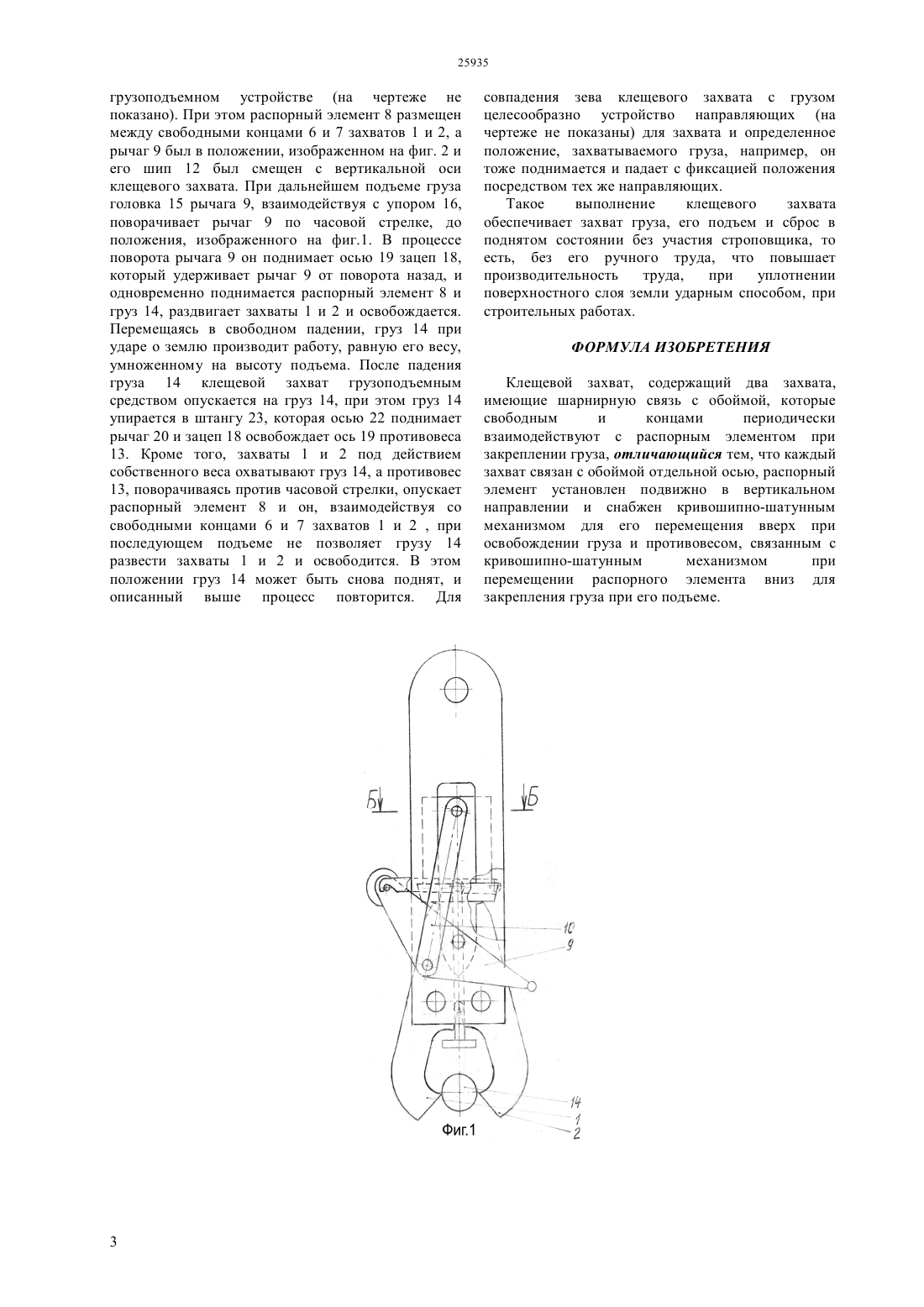
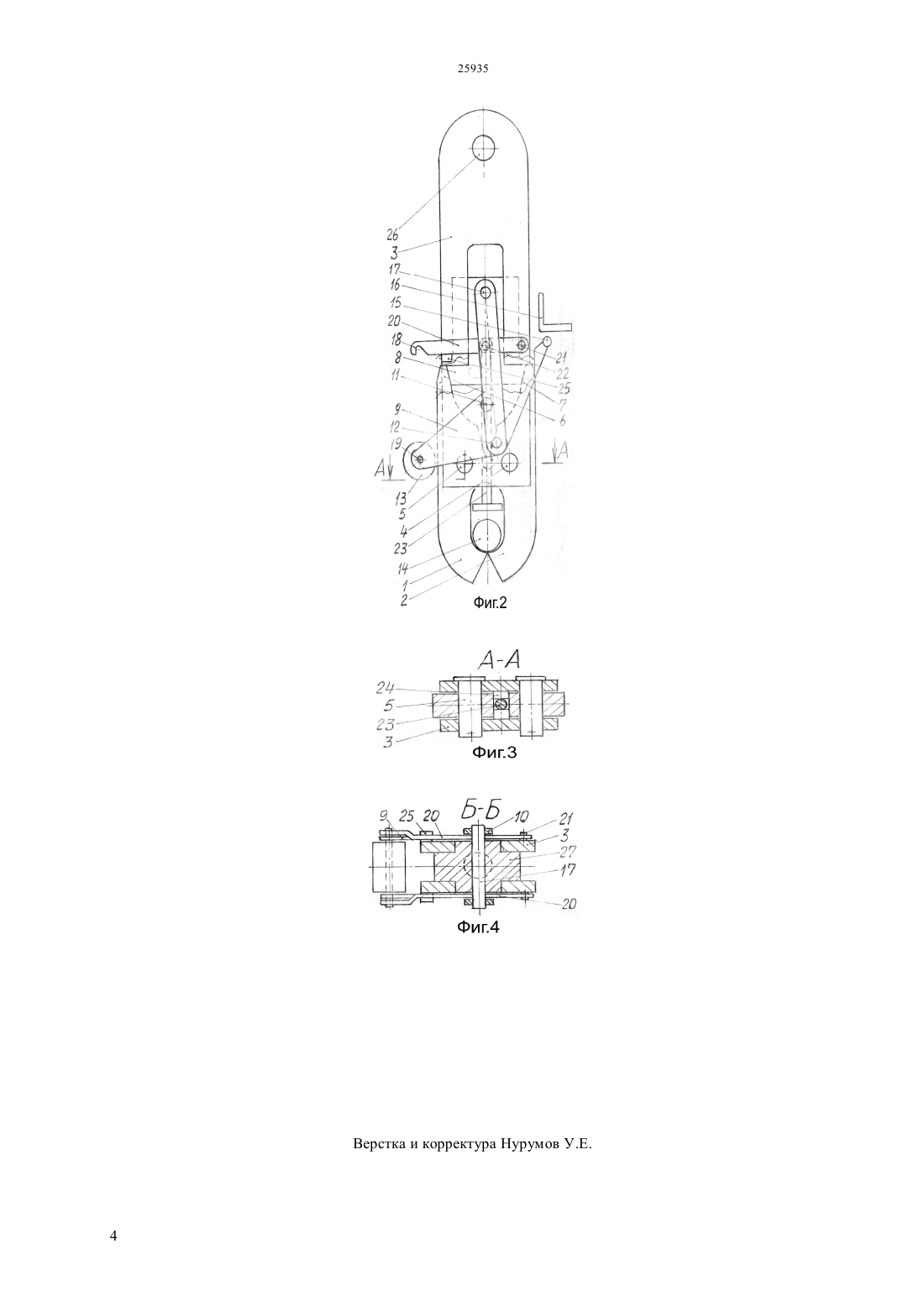
(51) 66 1/10 (2011.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ получаемый при осуществлении предлагаемого изобретения заключается в том, что исключается ручной труд при захвате поднимаемого груза и при его освобождении, включая освобождение в поднятом состоянии без снятия нагрузки, а также в возможности его применения для уплотнения грунта за счет использования энергии груза при сбрасывании его с высоты на поверхность грунта и более удобного в эксплуатации. Предложен клещевой захват, содержащий два захвата, имеющие шарнирную связь с обоймой, которые свободным концами периодически взаимодействуют с распорным элементом при закреплении груза,отличающийся тем, что каждый захват связан с обоймой отдельной осью, распорный элемент установлен подвижно в вертикальном направлении и снабжен кривошипно-шатунным механизмом для его перемещения вверх при освобождении груза и противовесом, связанным с кривошипно-шатунным механизмом при перемещении распорного элемента вниз для закрепления груза при его подъеме.(72) Асангалиев Елибек Атрауович Дейнеко Павел Федорович Дейнеко Павел Павлович(73) Республиканское государственное казенное предприятие Восточно-Казахстанский государственный технический университет им. Д.Серикбаева Министерства образования и науки Республики Казахстан(56) С.М. Меламед. Автоматические захваты для штучных грузов. М. Машиностроение 1965, с. 2425, фиг. 13(57) Изобретение относится к грузоподъемным устройствам и может быть использовано при строительстве дорог и других наземных сооружений, в частности, для уплотнения поверхностного слоя грунта ударным способом. Задачей, на решение которой направлено данное изобретение, является повышение производительности клещевого захвата. Технический результат, 25935 Изобретение относится к грузоподъемным устройствам и может быть использовано при строительстве дорог и других наземных сооружений, в частности, для уплотнения поверхностного слоя грунта ударным способом. Известно клещевое полуавтоматическое грузозахватное устройство для труб, содержащее сменные колодки, обеспечивающие захват трубы определенного диаметра по трем точкам,равномерно расположенным по окружности, ручку защелки, которая фиксирует устройство в открытом положении и обеспечивает раскрытие рычагов при опускании трубы на опоры, два рычага,двухветвевый строп, две серьги и корпус с двумя шарнирами для рычагов (см. А.А. Вайнсон, А.Ф. Андреев. Крановые грузозахватные устройства. Справочник. М. Машиностроение, 1982, с.162163, рис. 3.61). Основным недостатком данного устройства является то, что оно не может работать без участия строповщика, а также невозможность освобождения груза без снятия нагрузки. Наиболее близким по технической сущности к заявляемому изобретению является,захват,содержащий клещи, состоящие из двух захватов,шарнирно установленных на оси обоймы, а свободными концами,посредством пальцев шарнирно прикреплены к тягам, концы которых сочленены с несущей штангой, перемещающейся в обойме, при этом штанга подпружинена спиральной пружиной, установленной на направляющем стержне, и несет на оси распорную планку с дискомфиксатором, который при перемещении штанги взаимодействует с упором, расположенным на пластинчатой пружине обоймы, а фиксация планки осуществляется пружиной (см. С.М. Меламед. Автоматические захваты для штучных грузов. М. Машиностроение 1965, с. 24-25, фиг., 13). Основным недостатком этого устройства является низкая производительность конструкции из-за того, что при поднятом грузе его освободить нельзя, так как при этом груз должен располагаться на неподвижной поверхности. Задачей, на решение которой направлено данное изобретение, является повышение производительности клещевого захвата. Технический результат, получаемый при осуществлении предлагаемого изобретения заключается в том, что исключается ручной труд при захвате поднимаемого груза и при его освобождении, включая освобождение в поднятом состоянии без снятия нагрузки, а также в возможности его применения для уплотнения грунта за счет использования энергии груза при сбрасывании его с высоты на поверхность грунта и более удобного в эксплуатации. Сущность изобретения заключается в следующем. Предложен клещевой захват, содержащий два захвата, имеющие шарнирную связь с обоймой,которые свободным концами периодически взаимодействуют с распорным элементом при закреплении груза, отличающийся тем, что каждый 2 захват связан с обоймой отдельной осью, распорный элемент установлен подвижно в вертикальном направлении и снабжен кривошипно-шатунным механизмом для его перемещения вверх при освобождении груза и противовесом, связанным с кривошипно-шатунным механизмом при перемещении распорного элемента вниз для закрепления груза при его подъеме. На фиг. 1 изображен предлагаемый клещевой захват в момент захвата груза или его освобождения фиг. 2 - рабочее положение захвата при подъеме груза фиг. 3 - сечение по А-А фиг.2 фиг.4 - сечение по Б-Б фиг. 1. Клещевой захват состоит из захватов 1 и 2,расположенных в обойме 3 на осях 4 и 5. Свободные концы 6 и 7 захватов 1 и 2 в рабочем состоянии (см. фиг.2) взаимодействуют с распорным элементом 8,размещенным в обойме 3 с возможностью вертикального перемещения,посредством кривошипного шатунного механизма, состоящего из рычага 9 и шатуна 10. Кривошипом является середина рычага 9, которая связана поворотно посредством шипа 11, жестко связанного с обоймой 3, а посредством шипа 12, жестко связанного с рычагом 9, который связан с шатуном 10. На одном из концов рычага 9 размещен противовес 13,стремящийся за счет силы тяжести вращать рычаг 9 против часовой стрелки, обеспечивая захват груза 14. Другой конец рычага 9 снабжен головкой 15,предназначенной для взаимодействия с неподвижным упором 16, при подъеме груза с помощью которого, при вращении рычага 9 по часовой стрелке, происходит подъем распорного элемента 8 за счет связи шатуна 10 с осью 17,жестко связанной с ним. При этом распорный элемент 8 выходит из взаимодействия со свободными концами 6 и 7 захватов 1 и 2 и груз 14 за счет его собственной силы тяжести, раздвигает захваты 1 и 2 и освобождается. Для удержания захватов 1 и 2 в состоянии захватывать груз 14,рычаг 9 в крайнем положении удерживается зацепами 18, действующими с осью 19 противовеса 13. Зацепы 18 расположены на рычагах 20,вращающихся на осях 21, а посредством оси 22 связаны со штангой 23, перемещающейся ограниченно в вертикальном направлении между серединой захватов 1 и 2, которые в этом месте имеют координационные ролики 24,обеспечивающие синхронность их поворота. Ограниченность перемещения штанги 23 обеспечивается упорами 25, взаимодействующими с рычагами 20. Клещевой захват подвешивается осью 26, в варенной в обойму 3 к грузоподъемному устройству (на чертеже не показано). Кроме того,условно не обозначены прорези в распорном элементе 8 для прохода оси 22 и прорези в обойме 3 для возможности перемещения крестовидной части 27 распорного элемента 8. Клещевой захват работает следующим образом. Рабочее положение клещевого захвата изображено на фиг. 2, при котором с его помощью груз 14 может быть поднят на необходимую высоту,вплоть до упора 16, расположенного на грузоподъемном устройстве (на чертеже не показано). При этом распорный элемент 8 размещен между свободными концами 6 и 7 захватов 1 и 2, а рычаг 9 был в положении, изображенном на фиг. 2 и его шип 12 был смещен с вертикальной оси клещевого захвата. При дальнейшем подъеме груза головка 15 рычага 9, взаимодействуя с упором 16,поворачивает рычаг 9 по часовой стрелке, до положения, изображенного на фиг.1. В процессе поворота рычага 9 он поднимает осью 19 зацеп 18,который удерживает рычаг 9 от поворота назад, и одновременно поднимается распорный элемент 8 и груз 14, раздвигает захваты 1 и 2 и освобождается. Перемещаясь в свободном падении, груз 14 при ударе о землю производит работу, равную его весу,умноженному на высоту подъема. После падения груза 14 клещевой захват грузоподъемным средством опускается на груз 14, при этом груз 14 упирается в штангу 23, которая осью 22 поднимает рычаг 20 и зацеп 18 освобождает ось 19 противовеса 13. Кроме того, захваты 1 и 2 под действием собственного веса охватывают груз 14, а противовес 13, поворачиваясь против часовой стрелки, опускает распорный элемент 8 и он, взаимодействуя со свободными концами 6 и 7 захватов 1 и 2 , при последующем подъеме не позволяет грузу 14 развести захваты 1 и 2 и освободится. В этом положении груз 14 может быть снова поднят, и описанный выше процесс повторится. Для совпадения зева клещевого захвата с грузом целесообразно устройство направляющих (на чертеже не показаны) для захвата и определенное положение, захватываемого груза, например, он тоже поднимается и падает с фиксацией положения посредством тех же направляющих. Такое выполнение клещевого захвата обеспечивает захват груза, его подъем и сброс в поднятом состоянии без участия строповщика, то есть, без его ручного труда, что повышает производительность труда,при уплотнении поверхностного слоя земли ударным способом, при строительных работах. ФОРМУЛА ИЗОБРЕТЕНИЯ Клещевой захват, содержащий два захвата,имеющие шарнирную связь с обоймой, которые свободным и концами периодически взаимодействуют с распорным элементом при закреплении груза, отличающийся тем, что каждый захват связан с обоймой отдельной осью, распорный элемент установлен подвижно в вертикальном направлении и снабжен кривошипно-шатунным механизмом для его перемещения вверх при освобождении груза и противовесом, связанным с кривошипно-шатунным механизмом при перемещении распорного элемента вниз для закрепления груза при его подъеме.
МПК / Метки
МПК: B66C 1/10
Код ссылки
<a href="https://kz.patents.su/4-ip25935-kleshhevojj-zahvat.html" rel="bookmark" title="База патентов Казахстана">Клещевой захват</a>
Клещевой захват
Номер инновационного патента: 25060
Опубликовано: 15.12.2011
Авторы: Сулейманов Адам Ушумович, Дейнеко Павел Павлович, Сулейманов Ушум Саидалиевич, Дейнеко Павел Федорович
МПК: B66C 1/58, B25J 15/08
Формула / Реферат:
Изобретение относится к грузоподъемным устройствам и может быть использовано при строительстве дорог и наземных сооружений, в частности, для уплотнения поверхностного слоя грунта ударным способом. Задачей, на решение которой направлено данное изобретение, является создание такого клещевого захвата, который может быть использован без применения ручного труда при захвате и освобождении поднимаемого груза, включая его освобождение в поднятом...
Клещевой захват
Номер предварительного патента: 18323
Опубликовано: 15.03.2007
Автор: Жумаев Жолдыбай
Формула / Реферат:
Изобретение предназначено для использования в области подъемной техники, в частности для захвата и транспортировки штучных грузов. Клещевой захват; содержащий правый и левый рычаги, скрепленные по середине шарниром, к концам рычагов с помощью шарниров прикреплены тяговые рычаги, соединенные вместе центральным шарниром, за который крепится несущий канат, захватные губки, отличающийся тем, что к шарнирам крепления тяговых рычагов шарнирно...
Клещевой захват
Номер инновационного патента: 23751
Опубликовано: 15.03.2011
Авторы: Байымбетов Рустем, Амир Бахыт Тилеулесулы, Алтынов Жархын Лесович, Поветкин Виталий Васильевич, Турдалиев Ауезхан Турдалиевич
МПК: B25J 1/06
Формула / Реферат:
Изобретение предназначено для использования в области подъемно-транспортного машиностроения, в частности для захвата, транспортировки и кантования штучных грузов.Расширение технологических возможностей захвата, путем закрепления клещевого захвата к пневмоцилиндру и установления автоматического фиксатора положения захватных губок клещевого захвата. Также установка к захватным губкам вращательную пару с электроприводом позволит кантовать штучный...
Захват манипулятора
Номер предварительного патента: 5241
Опубликовано: 15.10.1997
Авторы: Журсенбаев Балагазы Ибраевич, Байгунчеков Жумадил Жанабаевич, Джолдасбеков Скандарбек Умирбекович
МПК: B25J 15/04
Метки: захват, манипулятора
Формула / Реферат:
Изобретение относится к машиностроению, а именно к роботам и манипуляторам.Технический результат - расширение зоны захвата и уменьшение нагрузок в соединениях.Захват содержит стойку, коромысло, образующие со звеньями и со стойкой первый параллелограмм, который сферически соединен с одной стороны посредством дополнительного рычага со звеном с проушиной, которая сферически соединена с ползуном, с другой стороны коромысло сферически соединено с...
Захват манинулятора
Номер патента: 462
Опубликовано: 15.03.1994
Авторы: Джолдасбеков Скандарбек Умирбекович, Журсентаев Балагазы Ибраевич, Джолдасбеков Умирбек Арсланович, Саурбаев Биржан Сарсембекович, Байгунчеков Жумадил Жанабаевич
МПК: B25J 15/00
Метки: манинулятора, захват
Формула / Реферат:
Изобретение относится к машиностроению, а именно к роботам и манипуляторам. Цель изобретения - расширение зоны захвата и повышение точности позиционирования. Захват манипулятора содержит привод, корпус, зажимные губки, каждая из которых связана с корпусом шарнирно-рычажным механизмом в виде двойного параллелограмма и прямолинейно направляющим механизмом, содержащим шатун и коромысло. Дополнительно он снабжен ползуном, смонтированным на выходном...
Предыдущий патент: Способ химической обработки логова популяций насекомых с помощью спутниковой навигации
Следующий патент: Способ получения полиэлектролита – стабилизатора водной дисперсии серы
Случайный патент: Способ получения пробиотика для профилактики и лечения заболеваний животных, птиц и рыб