Тренажер вождения грузового автомобиля
Номер полезной модели: 1780
Опубликовано: 31.10.2016
Авторы: Четин Андрей Михайлович, Казеев Аркадий Евгеньевич, Литовченко Виктор Петрович, Казеев Евгений Иванович
Формула / Реферат
Тренажер предназначен для обучения основным и профессиональным навыкам вождения грузового автомобиля при различных дорожных, ландшафтных и погодных условиях, в различное время года, без расхода моторесурса и горюче-смазочных материалов, в условиях учебного класса.
Технический результат - достижение максимально точной имитации органов управления грузового автомобиля, их вида, принципов работы и логики работы всех систем, агрегатов и создание эффекта присутствия, возникающего в процессе обучения как результат комплексного воздействия на обучаемых искусственных факторов, обеспечивающих максимальное приближение условий обучения к условиям работы водителя в реальном грузовом автомобиле.
Тренажер представляет собой учебно-тренировочный программноаппаратный комплекс, состоящий из модуля инструктора и модуля водителя. Тренажер характеризуется применением штатных органов управления и КИП на рабочем месте обучаемого, использованием рулевого колеса с системой обратной связи, наличием компьютерной акустической системы, состоящей из высоко- и низкочастотных динамиков для воспроизведения звуковой обстановки и команд инструктора, использованием микрофонов с аппаратной оцифровкой сигнала и широкоэкранной системы визуализации. В систему визуализации входят: 8 проекторов разрешением 1920x1200 пикселей (для формирования фронтального обзора и для левого и правого бокового обзора); сферического экрана проекции, закреплённого стационарно; система определения положения головы водителя для формирования закабинного изображения в зеркалах заднего вида с учетом перемещения точки наблюдения водителя. При изменении положения водителя (наклоны влево-право, вперед-назад) происходит изменение отображаемойобстановки в программно настраиваемых зеркалах заднего вида, как в реальном автомобиле. На рабочем месте инструктора отображаются поля зрения водителя, поле зрения с внешней подвижной камеры на район вождения и видеоизображение водителя, передаваемое с веб-камеры, установленной в кабине. Кабина расположена на шестистепенной электромеханической динамической платформе, имитирующей движение грузового автомобиля. В тренажере используется система вибрации для имитации динамических воздействий на обучаемого при работе двигателя. Модуль инструктора включает в себя программные и аппаратные средства блокировки динамической платформы. Несколько тренажеров могут быть объединены в локальную компьютерную сеть для совместной обработки учебных задач. Тренажер предоставляет возможность управления с одного модуля инструктора несколькими тренажерами.
Текст
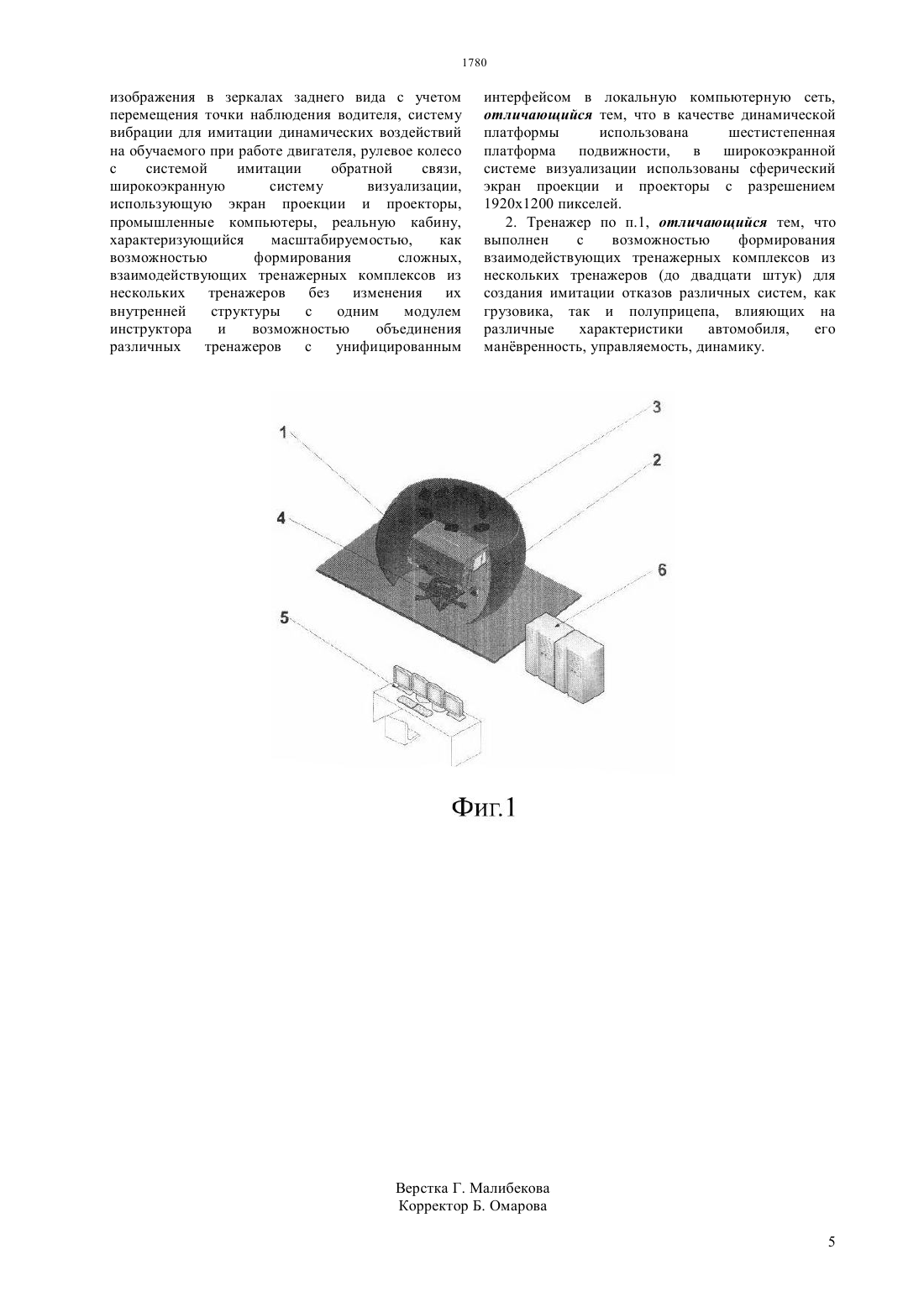
(51) 09 9/02 (2006.01) 09 9/05 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ системой обратной связи, наличием компьютерной акустической системы, состоящей из высоко- и низкочастотных динамиков для воспроизведения звуковой обстановки и команд инструктора,использованием микрофонов с аппаратной оцифровкой сигнала и широкоэкранной системы визуализации. В систему визуализации входят 8 проекторов разрешением 19201200 пикселей (для формирования фронтального обзора и для левого и правого бокового обзора) сферического экрана проекции, закреплнного стационарно система определения положения головы водителя для формирования закабинного изображения в зеркалах заднего вида с учетом перемещения точки наблюдения водителя. При изменении положения водителя (наклоны влево-право, вперед-назад) происходит изменение отображаемой обстановки в программно настраиваемых зеркалах заднего вида,как в реальном автомобиле. На рабочем месте инструктора отображаются поля зрения водителя,поле зрения с внешней подвижной камеры на район вождения и видеоизображение водителя,передаваемое с веб-камеры, установленной в кабине. Кабина расположена на шестистепенной электромеханической динамической платформе,имитирующей движение грузового автомобиля. В тренажере используется система вибрации для имитации динамических воздействий на обучаемого при работе двигателя. Модуль инструктора включает в себя программные и аппаратные средства блокировки динамической платформы. Несколько тренажеров могут быть объединены в локальную компьютерную сеть для совместной обработки учебных задач. Тренажер предоставляет возможность управления с одного модуля инструктора несколькими тренажерами.(72) Казеев Аркадий Евгеньевич Четин Андрей Михайлович Литовченко Виктор Петрович Казеев Евгений Иванович(74) Тагбергенова Модангуль Маруповна Тагбергенова Алма Таишевна(54) ТРЕНАЖЕР ВОЖДЕНИЯ ГРУЗОВОГО АВТОМОБИЛЯ(57) Тренажер предназначен для обучения основным и профессиональным навыкам вождения грузового автомобиля при различных дорожных,ландшафтных и погодных условиях, в различное время года, без расхода моторесурса и горючесмазочных материалов, в условиях учебного класса. Технический результат достижение максимально точной имитации органов управления грузового автомобиля, их вида, принципов работы и логики работы всех систем, агрегатов и создание эффекта присутствия, возникающего в процессе обучения как результат комплексного воздействия на обучаемых искусственных факторов,обеспечивающих максимальное приближение условий обучения к условиям работы водителя в реальном грузовом автомобиле. Тренажер представляет собой учебнотренировочный программно-аппаратный комплекс,состоящий из модуля инструктора и модуля водителя. Тренажер характеризуется применением штатных органов управления и контрольноизмерительных приборов (КИП) на рабочем месте обучаемого, использованием рулевого колеса с Тренажер предназначен для обучения основным и профессиональным навыкам вождения грузового автомобиля при различных дорожных,ландшафтных и погодных условиях, в различное время года, без расхода моторесурса и горючесмазочных материалов, в условиях учебного класса. Известен динамический компьютерный модульный тренажер вождения автомобиля КАМАЗ (индекс АТК-10-01), выпускаемый научно-производственным предприятием Электронно-механические системы(. ). Тренажер состоит из кабины водителя,расположенной на динамической платформе, и модуля инструктора. Динамический компьютерный модульный тренажер вождения автомобиля КАМАЗ, характеризующийся- наличием трехстепенной электромеханической динамической платформы- применением четырехмониторов для отображения изменяющегося виртуального пространства- применением штатных органов управления и контрольно-измерительных приборов(КИП) грузового автомобиля КАМАЗ на рабочем месте обучаемого- наличием аудиосистемы для имитации акустической обстановки на рабочем месте водителя- наличием контрольного и дублирующих мониторов на рабочем месте инструктора и вебкамеры в кабине водителя для наблюдения за обучаемым. Недостатками данного тренажера являются- отсутствие системы слежения за положением точки наблюдения водителя для соответствующего изменения закабинной обстановки- отсутствие системы вибрации для имитации динамических воздействий на обучаемого при работе двигателя- отсутствие имитации обратной связи на рулевом колесе. Ближайшим аналогом полезной модели,тренажера вождения грузового автомобиля является тренажер вождения грузового автомобиля 34350/5350 производства ООО Логос (Патент на ПМ 82910 РФ, МПК 09 9/02 09 9/05, опубл. 10.05.2009). Тренажер состоит из кабины водителя,расположенной на динамической платформе, и модуля инструктора. Тренажер характеризуется применением штатных органов управления и контрольно-измерительных приборов (КИП) на рабочем месте обучаемого,использованием рулевого колеса с системой обратной связи,наличием компьютерной акустической системы,состоящей из высоко- и низкочастотных динамиков для воспроизведения звуковой обстановки и команд инструктора, использованием микрофонов с аппаратной оцифровкой сигнала и широкоэкранной системы визуализации. В систему визуализации входят 4 проектора разрешением 12801024 пикселей (для формирования фронтального обзора и для левого и правого бокового обзора) светопередающие экраны, усиливающие яркость 2 изображения и устанавливаемые вместо стекол кабины автомобиля система определения положения головы водителя для формирования закабинного изображения с учетом перемещения точки наблюдения водителя. При изменении положения водителя (наклоны влево-право, впередназад) происходит изменение отображаемой обстановки во фронтальной и боковых системах обзора и в имитируемых,программно настраиваемых зеркалах заднего вида, как в реальном автомобиле. На рабочем месте инструктора отображаются полея зрения водителя,поле зрения с внешней подвижной камеры на район вождения и видеоизображение водителя,передаваемое с веб-камеры, установленной в кабине. В тренажере используются промышленные компьютеры, промышленная шина данных),обеспечивающая подключение имитаторов устройств оборудования кабины водителя для ввода/вывода и сбора данных(стандарт 11898), и компьютерная локальная сеть для цифровой передачи переговоров инструктора и водителя. Кабина расположена на трехстепенной электромеханической динамической платформе, имитирующей движение КАМАЗа. В тренажере используется система вибрации для имитации динамических воздействий на обучаемого при работе двигателя. Модуль инструктора включает в себя программные и аппаратные средства блокировки динамической платформы. Несколько тренажеров (до 10 шт.) могут быть объединены в локальную компьютерную сеть для совместной обработки учебных задач. Тренажер предоставляет возможность управления с одного модуля инструктора несколькими тренажерами. Недостатками данного тренажера являются- невозможность визуализации закабинной обстановки при больших отклонениях положения головы водителя и созданием при этом искривления визуальной информации использование трехстепенной электромеханической динамической платформы- отсутствие имитации различных отказов систем автомобиля- отсутствие обратной связи по усилию на руле от давления в колсах грузовика- отсутствие создания имитации поломок тележечного,прицепного,и тормозного оборудования полуприцепа. Задача полезной модели - разработка тренажера вождения грузового автомобиля. Технический результат-достижение максимально точной имитации органов управления грузового автомобиля, их вида, принципов работы и логики работы всех систем, агрегатов и создание эффекта присутствия, возникающего в процессе обучения как результат комплексного воздействия на обучаемых искусственных факторов,обеспечивающих максимальное приближение условий обучения к условиям работы водителя в реальном грузовом автомобиле. Технический результат достигается предлагаемым тренажером вождения грузового автомобиля,включающим штатные органы управления и контрольно-измерительные приборы(КИП) на рабочем месте обучаемого,электромеханическую динамическую платформу модуля водителя, компьютерную акустическую систему, состоящую из высоко- и низкочастотных динамиков для воспроизведения звуковой обстановки и команд инструктора, микрофоны с аппаратной оцифровкой сигнала, программные и аппаратные средства блокировки динамической платформы в модуле инструктора с возможностью программной настройки зеркал заднего вида,позволяющими программно и аппаратно дублировать поля зрения водителя на рабочем месте инструктора,отображать поля зрения с имитируемой внешней камеры на район вождения на рабочем месте инструктора, веб-камеру в кабине водителя для контроля действий обучаемого,компьютерную локальную сеть для цифровой передачи переговоров инструктора и водителя,систему определения положения головы водителя для формирования закабинного изображения в зеркалах заднего вида с учетом перемещения точки наблюдения водителя, систему вибрации для имитации динамических воздействий на обучаемого при работе двигателя, рулевое колесо с системой имитации обратной связи, широкоэкранную систему визуализации, использующую экран проекции и проекторы, промышленные компьютеры, реальную кабину, характеризующийся масштабируемостью,как возможностью формирования сложных,взаимодействующих тренажерных комплексов из нескольких тренажеров без изменения их внутренней структуры с одним модулем инструктора и возможностью объединения различных тренажеров с унифицированным интерфейсом в локальную компьютерную сеть, но в отличие от известного в качестве динамической платформы использована шестистепенная платформа подвижности, в широкоэкранной системе визуализации использованы сферический экран проекции и проекторы с разрешением 19201200 пикселей, а также тренажер выполнен с возможностью формирования взаимодействующих тренажерных комплексов из нескольких тренажеров(до двадцати штук) для создания имитации отказов различных систем, как грузовика, так и полуприцепа,влияющих на различные характеристики автомобиля, его манвренность,управляемость, динамику. В предлагаемом тренажере реализована концепции модульности и масштабируемости возможность формирования различных конфигураций тренажера из функционально законченных модулей инструктора и водителей. Это позволяет построить групповые тренажеры,обеспечивающие взаимодействие многих участников в реальном времени на общей синтезируемой местности или полигоне. Отличительные признаки предлагаемой полезной модели использование шестистепенной электромеханической динамической платформы- возможность программной настройки зеркал заднего вида- возможность создания отказа основных органов управления рулевое устройство, тормозная система,сцепление- возможность имитации выхода из строя элементов основного агрегата (двигателя)- возможность имитации поломок в механизации полуприцепов с влиянием на динамические характеристики автомобиля- имитация различных усилий на руле при снижении давления в одном или нескольких пневматиков колс наличие широкоэкранной системы визуализации, с применением сферического экрана и 8 проекторов разрешением 19201200 пикселей на каждый канал визуализации масштабируемость,как возможность формирования сложных,взаимодействующих тренажерных комплексов из нескольких тренажеров(до 20 шт.) без изменения их внутренней структуры с одним модулем инструктора. Общие характеристики предлагаемого тренажера- надежность. Тренажер обеспечивает время непрерывной работы не менее 8 часов с последующим перерывом 1 час. Тренажер обеспечивает среднюю наработку на отказ не менее 2000 часов и время готовности к работе не более 10 минут- обеспечение конструктивности. Конструкция изделия обеспечивает соответствие внешнего вида,расположения сидения, щитков контрольноизмерительных приборов (КИП), средств связи,других узлов и органов управления на рабочем месте обучаемого, а также усилий на органах управления и величин их перемещения данным конструкторской документации на имитируемый грузовой автомобиль с погрешностью не более 10. Питание компьютерных систем осуществляется посредством источников бесперебойного питания. Схема тренажера вождения грузового автомобиля представлена на фиг.1 и состоит из оригинальной кабины грузового автомобиля с рабочим местом водителя 1 сферического экрана прямой проекции 2 проекционной системы из 8 проекторов 3 шестистепенной платформы подвижности 4 модуля инструктора 5 и аппаратновычислительного комплекса 6. Тренажер вождения грузового автомобиля работает следующим образом. Инструктор со своего рабочего места 5 активирует аппаратно-вычислительный комплекс тренажра 6. После этого обучаемый занимает место в кабине 1. Оператор с рабочего места загружает программу обучения, а также по необходимости вносит изменения в первоначальные характеристики. Также, в процессе выполнения упражнения, у оператора сохраняется возможность вносить изменения или задействовать имитацию 3 отказа одной или нескольких систем грузового автомобиля. Обучаемый, оперируя органами управления в кабине 1, выполняет процедуру движения на автомобиле. При этом в аппаратнопрограммный комплекс 6 передаются состояния всех органов управления, находящихся в кабине 1 и на рабочем месте оператора 5. Воздействия на органы управления в кабине 1 формируют различные управляющие сигнала на систему подвижности 4, проекционную систему 3, зеркала заднего вида на кабине 1, устройства имитации обратной связи в кабине 1. Инструктор со своего рабочего места имеет возможность осуществлять визуальный контроль за действиями обучаемого по средствам -камеры, установленной в кабине 1, а также обмениваться аудио информацией. Имитаторы органов управления и контрольноизмерительные приборы (КИП) на рабочем месте водителя 1 оборудованы специальными датчиками. Обучаемый, находясь на рабочем месте 1 и выполняя поставленные задачи, воздействует на органы управления. Соответствующая информация в виде цифрового сигнала поступает в аппаратновычислительный комплекс 6. Аппаратновычислительный комплекс 6 вырабатывает необходимые управляющие сигналы. Под действием управляющих сигналов изменяются внешняя визуальная информация, показания приборов,световая информация, появляются и изменяются шумы работы агрегатов грузового автомобиля. Аппаратно-вычислительный комплекс 6 синтезирует внешнюю визуальную обстановку,фиксирует неправильные действия обучаемого и выдает необходимую информацию о профиле местности и имитируемых препятствиях. Система определения положения головы водителя формирует закабинное изображение на каждом имитаторе зеркала заднего вида с учетом перемещения точки наблюдения водителя. При изменении положения водителя (наклоны влевоправо,вперед-назад) происходит изменение отображаемой обстановки в имитируемом зеркале заднего вида, как в реальном автомобиле. Система контроля и оценки действий обучаемого фиксирует ошибки по подготовке и пуску двигателя, качеству вождения в сложных условиях, соблюдение правил дорожного движения, столкновение с другими участниками движения и препятствиями. По полученным результатам в конце упражнения автоматически выставляются оценки в соответствии с загружаемым курсом вождения, которые могут быть распечатаны на принтере для отчета. В режиме обучения действия обучаемого отражаются на экране монитора управления и инструктор, при необходимости, может корректировать его действия по переговорному устройству. Предлагаемый тренажер позволяет осуществить эффект присутствия,обеспечивающийся синхронизированным действием следующих видов информации- визуальной-обстановкой на рабочем месте водителя,показаниями приборов,световой индикацией, формированием изображения с учтом 4 расстояния до объектов и правильного их отображения относительно глаз водителя- акустической-спектром и уровнем шума работающих агрегатов и механизмов автомобиля в различных режимах (для обеспечения голосовой связи между водителем и инструктором используется акустическая система с микрофоном на рабочем месте водителя и головная гарнитура с микрофоном на рабочем месте инструктора)- динамической - воспроизведением усилий и величин перемещения органов управления,аналогичных реальным, воздействием перегрузок при колебаниях и вибрациях рабочего места обучаемого (управление платформой позволяет обеспечить имитацию разгонного и тормозного ускорений), изменений усилий на рулевом колесе в случае изменения давления в колсах, или динамических характеристиках автомобиля при разном уровне загрузки и балансировке груза. Все виды информации взаимосвязаны и изменяются в зависимости от обстановки и действий обучаемых. Максимально точная имитация органов управления грузового автомобиля достигается конструкцией модуля,обеспечивающей соответствие внешнего вида,расположения сидений,щитков контрольно-измерительных приборов (КИП), средств связи, других узлов и органов управления на рабочем месте обучаемого, а также усилий на органах управления и величин их перемещения данным конструкторской документации на имитируемый грузовой автомобиль с погрешностью не более 10. Различные конфигурации тренажера могут быть объединены в локальную компьютерную сеть для совместной обработки учебных задач. Один модуль инструктора может обеспечивать управление несколькими тренажерами. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Тренажер вождения грузового автомобиля,включающий штатные органы управления и контрольно-измерительные приборы (КИП) на рабочем месте обучаемого, электромеханическую динамическую платформу модуля водителя,компьютерную акустическую систему, состоящую из высоко- и низкочастотных динамиков для воспроизведения звуковой обстановки и команд инструктора, микрофоны с аппаратной оцифровкой сигнала, программные и аппаратные средства блокировки динамической платформы в модуле инструктора с возможностью программной настройки зеркал заднего вида, позволяющими программно и аппаратно дублировать поля зрения водителя на рабочем месте инструктора, отображать поля зрения с имитируемой внешней камеры на район вождения на рабочем месте инструктора, вебкамеру в кабине водителя для контроля действий обучаемого, компьютерную локальную сеть для цифровой передачи переговоров инструктора и водителя, систему определения положения головы водителя для формирования закабинного изображения в зеркалах заднего вида с учетом перемещения точки наблюдения водителя, систему вибрации для имитации динамических воздействий на обучаемого при работе двигателя, рулевое колесо с системой имитации обратной связи,широкоэкранную систему визуализации,использующую экран проекции и проекторы,промышленные компьютеры, реальную кабину,характеризующийся масштабируемостью,как возможностью формирования сложных,взаимодействующих тренажерных комплексов из нескольких тренажеров без изменения их внутренней структуры с одним модулем инструктора и возможностью объединения различных тренажеров с унифицированным интерфейсом в локальную компьютерную сеть,отличающийся тем, что в качестве динамической платформы использована шестистепенная платформа подвижности, в широкоэкранной системе визуализации использованы сферический экран проекции и проекторы с разрешением 19201200 пикселей. 2. Тренажер по п.1, отличающийся тем, что выполнен с возможностью формирования взаимодействующих тренажерных комплексов из нескольких тренажеров (до двадцати штук) для создания имитации отказов различных систем, как грузовика, так и полуприцепа, влияющих на различные характеристики автомобиля,его манвренность, управляемость, динамику.
МПК / Метки
Метки: автомобиля, вождения, тренажер, грузового
Код ссылки
<a href="https://kz.patents.su/5-u1780-trenazher-vozhdeniya-gruzovogo-avtomobilya.html" rel="bookmark" title="База патентов Казахстана">Тренажер вождения грузового автомобиля</a>
Тренажер механика-водителя многоцелевого тягачя легкого бронирование (МЛТБ)
Номер полезной модели: 1021
Опубликовано: 15.10.2013
Авторы: Бондаренко Тарас Григорьевич, Касьян Владимир Иванович, Казеев Аркадий Евгеньевич, Матвиевский Николай Александрович, Матвиевский Александр Николаевич, Касьян Иван Александрович, Казеев Евгений Иванович
МПК: G09B 7/00, G09B 9/00, F41G 3/00...
Метки: млтб, механика-водителя, многоцелевого, тренажер, тягачя, легкого, бронирование
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей транспортных средств, тягачей, например многоцелевого тягача легкого бронированного или его модификаций, в ходе технической, огневой и тактической подготовки артиллерийских, мотострелковых (механизированных) подразделений, подразделений противовоздушной обороны Сухопутных войск.В тренажере механика-водителя многоцелевого...
Тренажер водителя бронетранспортера БТР-80
Номер полезной модели: 1003
Опубликовано: 16.09.2013
Авторы: Касьян Владимир Иванович, Матвиевский Александр Николаевич, Касьян Иван Александрович, Казеев Евгений Иванович, Бондаренко Тарас Григорьевич, Матвиевский Николай Александрович, Казеев Аркадий Евгеньевич
МПК: G09B 9/00, F41G 3/00, G09B 7/00...
Метки: бтр-80, тренажер, водителя, бронетранспортера
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей бронетранспортеров в составе командира, стрелка и водителя, в ходе боевой подготовки механизированных подразделений Сухопутных войск.В тренажере водителя БТР-80, содержащем размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места водителя с размещенными внутри него имитаторами средств...
Ведущий мост и тележка для грузового автомобиля
Номер патента: 5389
Опубликовано: 15.10.1997
Автор: Сало Тимо
МПК: B60G 9/00
Метки: автомобиля, грузового, ведущий, тележка, мост
Формула / Реферат:
Изобретение относится к конструкции ведущего моста или тележки для грузового автомобиля, содержащей треугольную опору (5), ось (2), выполненную поворотной посредством позиционно регулируемых продольных опор (6), а между рамой (1) шасси и осью-опорные средства (3), например, рессоры, которые опираются на раму шасси транспортного средства, каждая посредством двух фактически направленных вниз тяг (7) подвески, расположенных соответственно на...
Комплексный тренажер экипажа многоцелевого тягача легкого бронированного (МТЛБ) с боевым модулем
Номер полезной модели: 1004
Опубликовано: 16.09.2013
Авторы: Бондаренко Тарас Григорьевич, Касьян Иван Александрович, Матвиевский Николай Александрович, Казеев Евгений Иванович, Касьян Владимир Иванович, Казеев Аркадий Евгеньевич, Матвиевский Александр Николаевич
МПК: G09B 7/00, F41G 3/00, G09B 9/00...
Метки: тренажер, комплексный, бронированного, мтлб, тягача, легкого, модулем, многоцелевого, боевым, экипажа
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения экипажей многоцелевых тягачей лёгких бронированных с боевым модулем в составе командира, оператора и механика-водителя, в ходе технической, огневой и тактической подготовки мотострелковых (механизированных) подразделений Сухопутных войск.В комплексном тренажере экипажа многоцелевого тягача МТЛБ с боевым модулем, содержащем...
Тренажер механика-водителя танка Т-72
Номер полезной модели: 1007
Опубликовано: 16.09.2013
Авторы: Матвиевский Александр Николаевич, Бондаренко Тарас Григорьевич, Касьян Владимир Иванович, Казеев Евгений Иванович, Казеев Аркадий Евгеньевич, Матвиевский Николай Александрович, Касьян Иван Александрович
МПК: G09B 9/00, G09B 7/00, F41G 3/00...
Метки: тренажер, т-72, механика-водителя, танка
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения механиков-водителей транспортных средств, танков и боевых машин, например, танка Т-72 или его модификаций, в ходе технической, огневой и тактической подготовки танковых подразделений Сухопутных войск.Тренажер механика-водителя танка Т-72 содержит размещенную на динамической платформе систему имитаторов в виде имитатора отделения...
Предыдущий патент: Ультразвуковой уровнемер
Следующий патент: Скамейка совмещенная с информационным носителем
Случайный патент: Устройство для разборки завалов к бульдозерному оборудованию путепрокладчика