Тренажер механика-водителя многоцелевого тягачя легкого бронирование (МЛТБ)
Номер полезной модели: 1021
Опубликовано: 15.10.2013
Авторы: Касьян Владимир Иванович, Касьян Иван Александрович, Казеев Аркадий Евгеньевич, Бондаренко Тарас Григорьевич, Матвиевский Александр Николаевич, Матвиевский Николай Александрович, Казеев Евгений Иванович
Формула / Реферат
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей транспортных средств, тягачей, например многоцелевого тягача легкого бронированного или его модификаций, в ходе технической, огневой и тактической подготовки артиллерийских, мотострелковых (механизированных) подразделений, подразделений противовоздушной обороны Сухопутных войск.
В тренажере механика-водителя многоцелевого тягача МТЛБ, содержащем размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места механика-водителя с размещенными внутри него имитаторами средств управления, автоматизированное рабочее место (АРМ) руководителя занятий с программно-вычислительным комплексом с программным обеспечением (ПО), а также систему обмена данными, при этом элементы тренажера соединены между собой через локальную вычислительную сеть (ЛВС), новым является то, что, система имитаторов выполнена в виде имитатора рабочего места механика-водителя (I) с размещенными внутри него имитаторами средств управления, имитатор рабочего места механика-водителя (I) содержит систему визуализации в виде оптических приборов, которые выполнены с возможностью имитации характеристик реальных приборов наблюдения механика-водителя МТЛБ, а также имитатор отображения вида в смотровое окно механика-водителя (2), тренажер содержит подвижную динамическую платформу (II), выполненную с возможностью реализации шести степеней свободы, и связанную с имитатором рабочего места механика-водителя (I), АРМ руководителя занятий (III) содержит аппаратные программные модули, которые содержат ПО и программируемые логические интегральные схемы (ПЛИС), поддерживающие «зашивку» алгоритмов реализации сценариев тренировок, алгоритмов объективного контроля и оценки обучаемого, алгоритмов объективного контроля и оценки руководителя, а также алгоритмов имитации рельефа реальной местности, при этом тренажер содержит цифровую сеть передачи данных имитатора рабочего места механика-водителя (I), сеть трактов передачи видеосигналов, сеть передачи имитированных звуков, сеть обмена сигналами внутренней связи, а также сеть стабилизированного напряжения тренажера.
Техническим результатом является повышение эффективности и интенсивности технической и боевой подготовки подразделений (механиков-водителей) Сухопутных войск, а именно роты, взвода, экипажа МТЛБ с боевым модулем, при минимальных затратах ресурсных и материальных (денежных) средств на организацию и проведение занятий по этим видам подготовки.
6 з.п. ф-лы, 1 ил.
Текст
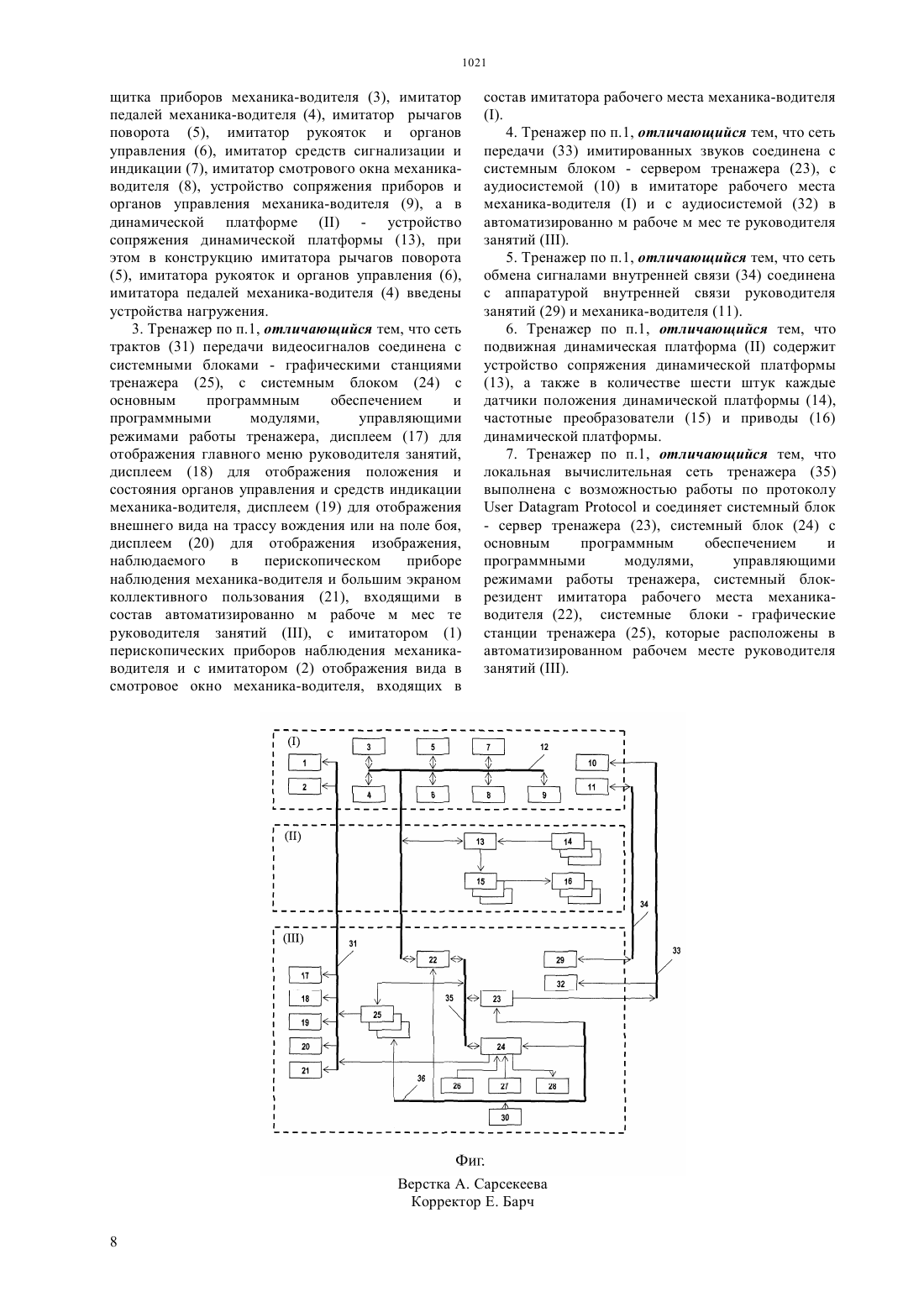
(51) 41 3/00 (2006.01) 09 7/00 (2006.01) 09 9/00 (2006.01) 09 9/04 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ выполнена в виде имитатора рабочего места механика-водителяс размещенными внутри него имитаторами средств управления, имитатор рабочего места механика-водителясодержит систему визуализации в виде оптических приборов,которые выполнены с возможностью имитации характеристик реальных приборов наблюдения механика-водителя МТЛБ, а также имитатор отображения вида в смотровое окно механикаводителя (2), тренажер содержит подвижную динамическую платформу , выполненную с возможностью реализации шести степеней свободы,и связанную с имитатором рабочего места механика-водителя , АРМ руководителя занятий содержит аппаратные программные модули,которые содержат ПО и программируемые логические интегральные схемы(ПЛИС),поддерживающие зашивку алгоритмов реализации сценариев тренировок, алгоритмов объективного контроля и оценки обучаемого,алгоритмов объективного контроля и оценки руководителя, а также алгоритмов имитации рельефа реальной местности, при этом тренажер содержит цифровую сеть передачи данных имитатора рабочего места механика-водителя ,сеть трактов передачи видеосигналов, сеть передачи имитированных звуков, сеть обмена сигналами внутренней связи, а также сеть стабилизированного напряжения тренажера. Техническим результатом является повышение эффективности и интенсивности технической и боевой подготовки подразделений (механиковводителей) Сухопутных войск, а именно роты,взвода, экипажа МТЛБ с боевым модулем, при минимальных затратах ресурсных и материальных(денежных) средств на организацию и проведение занятий по этим видам подготовки.(72) Казеев Евгений ИвановичКазеев Аркадий ЕвгеньевичМатвиевский Александр Николаевич Бондаренко Тарас ГригорьевичКасьян Владимир Иванович Касьян Иван Александрович(73) Казеев Евгений ИвановичМатвиевский Александр Николаевич(54) ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ МНОГОЦЕЛЕВОГО ТЯГАЧЯ ЛЕГКОГО БРОНИРОВАНИЕ (МЛТБ)(57) Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей транспортных средств, тягачей, например многоцелевого тягача легкого бронированного или его модификаций, в ходе технической, огневой и тактической подготовки артиллерийских,мотострелковых(механизированных) подразделений, подразделений противовоздушной обороны Сухопутных войск. В тренажере механика-водителя многоцелевого тягача МТЛБ, содержащем размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места механика-водителя с размещенными внутри него имитаторами средств управления, автоматизированное рабочее место(АРМ) руководителя занятий с программновычислительным комплексом с программным обеспечением (ПО), а также систему обмена данными, при этом элементы тренажера соединены между собой через локальную вычислительную сеть Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей транспортных средств, тягачей, например многоцелевого тягача легкого бронированного(механизированных) подразделений, подразделений противовоздушной обороны (ПВО) Сухопутных войск. Известна интерактивная автоматизированная система имитационного моделирования в виде многофункционального тренажера,предназначенного для обучения и подготовки авиационных специалистов, содержащая локальную вычислительную (компьютерную) сеть (далее ЛВС),унифицированное рабочее место инструктора, комплекс унифицированных рабочих мест обучаемых в летной группе инструктора, экран коллективного пользования, устройство ввода полетной информации и базу данных сценариев тренировок. При этом ЛВС содержит программные модули реализации сценариев тренировок,объективного контроля обучаемого и объективного контроля инструктора Патент 2087037, МПК 8 099/08. Опубл. 10.08.1997, Бюл.25 Недостатком устройства аналога является его невысокая эффективность, а также невозможность применения для обучения и боевой подготовки артиллерийских, мотострелковых подразделений,подразделений ПВО Сухопутных войск, в частности, механиков-водителей тягачей МТЛБ. Как устройство наиболее близкого аналога(прототип) выбран автоматизированный тренажерный комплекс для подготовки экипажей кораблей, который содержит систему имитаторов в виде имитатора рабочего места механика- водителя с размещенными внутри него имитаторами средств управления,комплекта учебно-действующего образца автоматизированного рабочего места(АРМ), установленного на качающейся платформе с двумя-тремя степенями свободы, комплекта АРМ операторов,пост руководства обучением,вычислительно-модульный комплекс с программным обеспечением (ПО) и систему обмена данными, при этом все элементы комплекса соединены между собой через ЛВС Патент 2234138, МПК 8 099/00. Опубл. 08.10.2004 Недостатком известного устройства наиболее близкого аналога является невозможность его применения для обучения и боевой подготовки артиллерийских, мотострелковых подразделений,подразделений ПВО Сухопутных войск, в частности, механиков-водителей тягачей МТЛБ, а также то,что оно не позволяет индивидуализировать процесс обучения,и,следовательно, значительно сужает круг решаемых задач. В свою очередь, существующие базы сценариев тренировок не позволяют сделать обучение интерактивным, вносить в него изменения по ходу обучения в зависимости от принимаемых решений каждым обучаемым и оценивать их 2 влияние на других обучаемых, что приводит к опасности воспитания преимущественно виртуальных специалистов. Задачей предлагаемого технического решения является создание тренажера вождения (далее тренажера) для проведения занятий по технической и боевой подготовке с артиллерийскими,мотострелковыми подразделениями,подразделениями ПВО Сухопутных войск, а именно с ротой, взводом, экипажем (механикамиводителями МТЛБ), путем введения в его состав новых элементов и установления эффективной взаимосвязи между всеми элементами тренажера, а также выполнения тренажера с возможностью моделирования условий тренажного одностороннего и двустороннего боя, максимально приближенного к реальным боевым действиям, с программно генерируемыми объектами, что будет содействовать повышению эффективности и интенсивности технической и боевой подготовки подразделений(механиков-водителей) при минимальных затратах ресурсных и материальных (денежных) средств на организацию и проведение занятий по этим видам подготовки. Указанная задача решается тем, что в тренажере механика-водителя многоцелевого тягача МТЛБ,содержащем размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места механика-водителя с размещенными внутри него имитаторами средств управления,автоматизированное рабочее место(АРМ) руководителя занятий с программновычислительным комплексом с программным обеспечением (ПО), а также систему обмена данными, при этом элементы тренажера соединены между собой через локальную вычислительную сеть(ЛВС), новым является то, что, система имитаторов выполнена в виде имитатора рабочего места механика- водителяс размещенными внутри него имитаторами средств управления,имитатор рабочего места механика-водителясодержит систему визуализации в виде оптических приборов,которые выполнены с возможностью имитации характеристик реальных приборов наблюдения механика-водителя МТЛБ, а также имитатор отображения вида в смотровое окно механикаводителя (2), тренажер содержит подвижную динамическую платформу , выполненную с возможностью реализации шести степеней свободы,и связанную с имитатором рабочего места механика-водителя , АРМ руководителя занятий содержит аппаратные программные модули,которые содержат ПО и программируемые логические интегральные схемы(ПЛИС),поддерживающие зашивку алгоритмов реализации сценариев тренировок, алгоритмов объективного контроля и оценки обучаемого,алгоритмов объективного контроля и оценки руководителя, а также алгоритмов имитации рельефа реальной местности, при этом тренажер содержит цифровую сеть (12) передачи данных имитатора рабочего места механика-водителя ,сеть трактов (31) передачи видеосигналов, сеть(34) сигналами внутренней связи, а также сеть стабилизированного напряжения тренажера (36). Цифровая сеть (12) передачи данных имитатора рабочего места механика-водителясоединяет в АРМ руководителя занятийсистемный блокрезидент имитатора рабочего места механикаводителя (22), в имитаторе рабочего места механика-водителя- имитатор щитка приборов механика-водителя (3), имитатор педалей механикаводителя (4), имитатор рычагов поворота (5),имитатор рукояток и органов управления (6),имитатор средств сигнализации и индикации (7),имитатор смотрового окна механика-водителя (8),устройство сопряжения приборов и органов управления механика- водителя (9), а в динамической платформе- устройство сопряжения динамической платформы (13), при этом в конструкцию имитатора рычагов поворота(5), имитатора рукояток и органов управления (6),имитатора педалей механика-водителя (4) введены устройства нагружения. Сеть трактов (31) передачи видеосигналов соединена с системными блоками - графическими станциями тренажера (25), с системным блоком (24) с основным ПО и программными модулями,управляющими режимами работы тренажера,дисплеем (17) для отображения главного меню руководителя занятий,дисплеем(18) для отображения положения и состояния органов управления и средств индикации механикаводителя, дисплеем (19) для отображения внешнего вида на трассу вождения или на поле боя, дисплеем(20) для отображения изображения, наблюдаемого в перископическом приборе наблюдения механикаводителя и большим экраном коллективного пользования (21), входящими в состав АРМ руководителя занятий , с имитатором (1) перископических приборов наблюдения механикаводителя и с имитатором (2) отображения вида в смотровое окно механика-водителя, входящих в состав имитатора рабочего места механика-водителя. Сеть передачи (33) имитированных звуков соединена с системным блоком - сервером тренажера (23), с аудиосистемой (10) в имитаторе рабочего места механика- водителяи с аудиосистемой (32) в АРМ руководителя занятий. Сеть обмена сигналами внутренней связи (34) соединена с аппаратурой внутренней связи руководителя занятий (29) и механика-водителя(11). Подвижная динамическая платформасодержит устройство сопряжения динамической платформы (13), а также в количестве шести штук каждые датчики положения динамической платформы (14), частотные преобразователи (15) и приводы (16) динамической платформы. ЛВС тренажера (35) выполнена с возможностью работы по протоколуи соединяет системный блок - сервер тренажера (23),системный блок (24) с основным ПО и программными модулями,управляющими режимами работы тренажера, системный блок резидент имитатора рабочего места механикаводителя (22), системные блоки - графические станции тренажера (25), которые расположены в АРМ руководителя занятий . Вышеперечисленные признаки составляют сущность полезной модели. Наличие причинно-наследного связи между совокупностью существенных признаков полезной модели и достигаемым техническим результатом заключается в следующем. Особенностью структуры и функционирования разработанного тренажера механика-водителя МТЛБ, который содержит в себе размещенный на подвижной динамической платформе имитатор рабочего места механика-водителя МТЛБ с размещенными внутри него имитаторами средств штатного вооружения, АРМ руководителя занятий с программно-вычислительным комплексом с программным обеспечением (ПО), содержащим сценарии тренировок, объективного контроля и оценки обучаемых, а также ЛВС, является, в частности, следующее. Благодаря введению в состав имитатора рабочего места механика-водителяшестистепенной подвижной динамической платформы реализованы поперечные и продольные перемещения и ускорения кабины отделения управления, ускорение и ограниченное вращение е вокруг вертикальной оси, с учетом возможного поворота корпуса МТЛБ во время упражнений, что существенно повышает реалистичность выполнения упражнений по вождению. Система визуализации в имитаторе рабочего места механика-водителясодержит имитаторы оптических приборов,которые имитируют характеристики реальных приборов наблюдения механика-водителя МТЛБ. ПО части упражнений по вождению предлагаемого тренажера выполнено с использованием имитированных местных предметов и рельефа местности, созданных на основе цифровых (электронных) карт земной поверхности,полученных космической и аэрофотосъмкой. Таким образом, вышеуказанное конструктивное выполнение тренажера, а также возможность моделирования при помощи тренажера условий вождения на реальной местности, максимально приближенных к реальным боевым действиям, с программно генерируемыми объектами,способствует повышению эффективности и интенсивности технической и боевой подготовки подразделений при минимальных затратах ресурсных и материальных (денежных) средств на организацию и проведение занятий по этим видам подготовки А.И.Кириллов,В.П.Кузнецов,В.И.Агафонов и др./Под ред. Ю.А.Науменко. Подготовка офицеров запаса Сухопутных войск Учебное пособие. - М. Воениздат, 1989. -448 с На фиг.1 показана структура тренажера механика-водителя МТЛБ. Тренажер включает в себя три (укрупненные) системы (обозначены на фиг. римскими цифрами) имитатор рабочего места механика-водителяна подвижной динамической платформе , а также автоматизированное рабочее место(АРМ) руководителя занятий . В имитаторе рабочего места механика-водителя размещены следующие элементы и блоки 1 имитатор перископических приборов наблюдения механика- водителя, например, марки ТНПО-170 А(в количестве три шт.) 2 - имитатор отображения вида в смотровое окно механика-водителя 3 имитатор щитка приборов механика-водителя 4 имитатор педалей механика-водителя 5 - имитатор рычагов поворота 6 - имитатор рукояток и органов управления 7 - имитатор средств сигнализации и индикации 8 - имитатор смотрового окна механикаводителя 9 - устройство сопряжения приборов и органов управления механика-водителя 10 аудиосистема в имитаторе рабочего места механикаводителя 11 - аппаратура внутренней связи механика-водителя 12 - цифровая сеть передачи данных имитатора рабочего места механикаводителя . Система визуализации в имитаторе рабочего места механика-водителясодержит имитатор перископических приборов наблюдения механикаводителя (1), которые выполнены с возможностью имитации характеристик реальных приборов наблюдения механика-водителя МТЛБ. Динамическая платформа является подвижной шестистепенной платформой. В состав динамической платформывходят следующие блоки, а именно 13 - устройство сопряжения динамической платформы 14 - датчики положения динамической платформы, выполняющих роль датчиков обратной связи (в количестве шесть шт.) 15 - частотные преобразователи (в количестве шесть шт.) 16 - приводы динамической платформы (в количестве шесть шт.). В АРМ руководителя занятийразмещены 17 - дисплей для отображения главного меню руководителя занятий, с ПО (программами) подменю управления режимами работы тренажера,редактирования упражнений, ввода данных об обучаемых, выбора погодных условий, просмотра электронной карты местности, текущего контроля за действиями обучаемых, просмотра протоколов (в форме электронных текстовых документов (файлов) о выполнении упражнения 18 - дисплей для отображения положения и состояния органов управления и средств индикации механикаводителя 19 - дисплей для отображения внешнего вида на трассу вождения или на поле боя 20 дисплей для отображения изображения,наблюдаемого в перископическом приборе наблюдения механика-водителя 21 - большой экран коллективного пользования (выполненный в виде плазменной панели,ЖК монитора или проекционного экрана), предназначенный для наблюдения за ходом выполнения упражнения другими обучаемыми, для подведения итогов занятия и повторения выполнения упражнения в 4 записи 22 - системный блок - резидент имитатора рабочего места механика-водителя 23 - системный блок - сервер тренажера 24 - системный блок с основным ПО и программными модулями,управляющими режимами работы тренажера 25 системные блоки - графические станции тренажера 26 - оптический манипулятор 27 - клавиатура 28 принтер 29 - аппаратура внутренней связи руководителя занятий 30 - система электропитания тренажера, предназначенная для бесперебойного питания системных блоков тренажера 31 - сеть трактов передачи видеосигналов от системных блоков - графических станций тренажера (25) и системного блока (24) с основным ПО и программными модулями,управляющими режимами работы тренажера, на дисплеи (17- 20), на большой экран коллективного пользования (21) в АРМ руководителя занятий , на имитатор перископических приборов наблюдения механикаводителя (1) и на имитатор отображения вида в смотровое окно механика-водителя (2) в имитаторе рабочего места механика-водителя 32 аудиосистема в АРМ руководителя занятий 33- сеть передачи имитированных звуков от системного блока - сервера тренажера (23) на аудиосистему (10) в имитаторе рабочего места механика-водителя и на аудиосистему (32) в АРМ руководителя занятий 34 - сеть обмена сигналами внутренней связи между аппаратурой внутренней связи руководителя занятий (29) и механика-водителя (11) 35 - ЛВС тренажера 36 сеть стабилизированного напряжения тренажера,220 В, 50 Гц Таким образом, в тренажере размещены и функционируют следующие телекоммуникационные сети и сети электрических соединений ЛВС тренажера (35), цифровая сеть(12) передачи данных имитатора рабочего места механика-водителя, сеть трактов (31) передачи видеосигналов, сеть передачи (33) имитированных звуков, сеть обмена сигналами внутренней связи(34),сеть стабилизированного напряжения тренажера (36). ЛВС тренажера (35) работает, например, по протоколу(, т.е. это транспортный протокол пользовательских дейтаграмм, в рамках которого передаются данные в сетях без установления соединения). ЛВС тренажера (35) соединяет системный блок сервер тренажера (23), системный блок (24) с основным ПО и программными модулями,управляющими режимами работы тренажера,системный блок - резидент имитатора рабочего места механика-водителя (22), системные блоки графические станции тренажера(25) (все вышеуказанные элементы и блоки расположены в АРМ руководителя занятий ). Цифровая сеть (12) передачи данных имитатора рабочего места механика-водителя соединяет- в АРМ руководителя занятийсистемный блок - резидент имитатора рабочего места механикаводителя (22)- в имитаторе рабочего места механика-водителя имитатор щитка приборов механика-водителя(3), имитатор педалей механика-водителя (4),имитатор рычагов поворота (5), имитатор рукояток и органов управления (6), имитатор средств сигнализации и индикации (7), имитатор смотрового окна механика-водителя (8), устройство сопряжения приборов и органов управления механика-водителя- в динамической платформеустройство сопряжения динамической платформы (13). Сеть трактов (31) передачи видеосигналов от системных блоков - графических станций тренажера(25) и системного блока с основным ПО и программными модулями,управляющими режимами работы тренажера (24), соединяет- дисплей (17) для отображения главного меню руководителя занятий,дисплей(18) для отображения положения и состояния органов управления и средства индикации механикаводителя, дисплей (19) для отображения внешнего вида на трассу вождения или на поле боя, дисплей(20) для отображения изображения, наблюдаемого в перископическом приборе наблюдения механикаводителя, а также большой экран коллективного пользования (21) АРМ руководителя занятийимитатор перископических приборов наблюдения механика-водителя (1) и имитатор отображения вида в смотровое окно механикаводителя (2) в имитаторе рабочего места механикаводителя . Сеть передачи (33) имитированных звуков служит для их передачи от системного блока сервера тренажера (23) на аудиосистему (10) в имитаторе рабочего места механика-водителяи на аудиосистему (32) АРМ руководителя занятий. В сети обмена сигналами внутренней связи (34) объединены аппаратуры внутренней связи руководителя занятий (29) и механика-водителя(11). Поэтому вышеуказанные участники занятия могут слышать друг друга. Системный блок (24) с основным ПО и программными модулями,управляющими режимами работы тренажера, подключен к оптическому манипулятору (26), к клавиатуре (27) и к принтеру (28), а по сети трактов (31) передачи видеосигналов - к дисплею (17) для отображения главного меню руководителя занятий,. К системе электропитания (30) тренажера подключены сетью стабилизированного напряжения тренажера, 220 В, 50 Гц, (36) все системные блоки тренажера (22), (23), (24), (25). Тренажер механика-водителя многоцелевого тягача МТЛБ используется следующим образом. Исходные данные для выполнения упражнения,введенные руководителем занятий в АРМ с помощью клавиатуры (27) и оптического манипулятора (26) в главном меню тренажера на дисплее (17), подключенном к системному блоку(24) с основным ПО и программными модулями,управляющими режимами работы тренажера, передаются по ЛВС тренажера (35) на системный блок - сервер тренажера (23). Посредством последнего рассчитывается рельеф местности, определяется положение всех объектов,рассчитываются взаимодействия и столкновения объектов, наклон и поворот корпуса, маршрут движения МТЛБ. Эти данные по ЛВС тренажера (35) с системного блока - сервера тренажера (23) передаются на системные блоки - графические станции тренажера(25), при помощи которых вырабатываются изображения для имитаторов приборов наблюдения. Эти изображения передают по сети трактов передачи видеосигналов (31) на дисплеи (17-20) и на большой экран коллективного пользования (21),находящиеся в АРМ руководителя занятий , на имитатор перископических приборов наблюдения механика-водителя (1) и на имитатор отображения вида в смотровое окно механика- водителя (2) в имитаторе рабочего места механика-водителя . В соответствии со сценарием выполняемого упражнения сигналы с системного блока - сервера тренажера (23) по ЛВС тренажера (35) поступают на системный блок - резидент имитатора рабочего места механика-водителя (22), в котором на основе этой информации вырабатываются и передаются по цифровой сети передачи данных (12) сигналы на устройства сопряжения (9) и (13). Из полученных данных посредством устройств сопряжения (9) и (13) вырабатывают команды управления работой имитатора щитка приборов механика- водителя (3), имитатора педалей механика-водителя (4), имитатора рычагов поворота(5), имитатора рукояток и органов управления (6),имитатора средств сигнализации и индикации (7),имитатора смотрового окна механика-водителя (8) и для управления динамической платформой . В динамической платформев соответствии с сигналами управления,поступающими от устройства сопряжения динамической платформы(13),посредством шести частотных преобразователей (15) изменяют амплитуду и частоту напряжения питания шестью одинаковыми приводами динамической платформы (16). В результате перемещения приводов (16) изменяют положение в пространстве динамической платформыв соответствии с имитируемыми ускорениями и наклонами МТЛБ. Сигналы обратной связи о текущем положении динамической платформыснимают с шести датчиков (14) положения динамической платформы и подают в устройство сопряжения динамической платформы (13), и далее по цифровой сети передачи данных (12) имитатора рабочего места механикаводителя передают на системный блок - резидент(22) имитатора рабочего места механика-водителя, а затем по ЛВС тренажера (35) на системный блок сервер тренажера (23) для обработки. С целью повышения реалистичности ощущений обучаемых введены устройства нагружения в конструкцию имитатора рычагов поворота (5),имитатора рукояток и органов управления (6),имитатора педалей механика-водителя (4). 5 В соответствии с действиями обучаемых изменяется состояние имитатора щитка приборов механика-водителя(5), имитатора рукояток и органов управления (6),имитатора средств сигнализации и индикации (7),имитатора смотрового окна механика-водителя (8). Сигналы от указанных имитаторов поступают по цифровой сети (12) передачи данных имитатора рабочего места механика-водителя на устройства сопряжения (9) и (13), в которых они обрабатываются, и по цифровой сети (12) передачи данных имитатора рабочего места механикаводителясигналы передаются на системный блок- резидент имитатора рабочего места механикаводителя (22), откуда информация по ЛВС тренажера (35) передатся на системный блок сервер тренажера (23) для расчета хода выполнения упражнения. По сети передачи имитированных звуков (33) звуки упражнения, сформированные системным блоком - сервером тренажера (23), в соответствии с ПО и программными модулями, передаются на аудиосистему (10) в имитаторе рабочего места механика- водителя и на аудиосистему (32) в АРМ руководителя занятий . На этапе подготовки занятия его руководитель на своем АРМ на дисплее (17), соединенном с системным блоком (24) с основным ПО и программными модулями,управляющими режимами работы тренажера, в главном меню с помощью оптического манипулятора (26) на экране дисплея (17) проводит следующие операции на электронных текстовых и графических документах а) выбирает тип упражнения, время дня, года,тип местности. В подменю выбора номера упражнения оптическим манипулятором (26) на экране дисплея (17) руководитель выбирает тип и номер упражнения, в подменю условий выполнения упражнений оптическим манипулятором (26) вводит погодные условия посредством шкал температуры,скорости ветра, давления воздуха, интенсивности тумана б) вводит данные об обучаемых. В подменю ввода данных об обучаемых с помощью клавиатуры(27) руководитель вносит фамилии и номер подразделения в соответствующие поля на экране дисплея(17). Данные используются при последующем выставлении оценки, формирования отчета и его печати на принтере (28) в) редактирует упражнение. В подменю редактирования упражнений на экране дисплея (17) руководитель оптическим манипулятором (26) и клавиатурой (27) изменяет тип и расположение объектов и препятствий на местности, их количество. В этом же подменю, используя схему местности на экране дисплея (17), руководитель знакомит обучаемых на электронной карте местности с условиями выполнения упражнения, размещением препятствий, оценочными показателями по скорости движения, требованиями к качеству преодоления препятствий, временем на выполнение упражнения. 6 После ввода всех исходных данных на экране дисплея (17) в электронные текстовые и графические документы руководитель начинает выполнение упражнения. Водитель занимает сво место в имитаторе рабочего места механикаводителя . Динамическая платформаподнимается в среднее положение. В имитаторе перископических приборов наблюдения механика-водителя (1), в имитаторе отображения вида в смотровое окно механика-водителя (2), на дисплеях (19-20) АРМ руководителя занятийотображены местности,объекты, препятствия. Механик-водитель заводит двигатель МТЛБ Динамическая платформасовершает качания и повороты в соответствии с рельефом имитированной местности. Механик-водитель управляет машиной с помощью имитатора щитка приборов механикаводителя (3), имитатора педалей механика-водителя(4), имитатора рычагов поворота (5), имитатора рукояток и органов управления (6) и имитатора смотрового окна механика-водителя(8). Наблюдение за местностью производится в имитаторы перископических приборов наблюдения(1) и в имитатор отображения вида в смотровое окно механика-водителя (2). Во время выполнения упражнения руководитель может постоянно контролировать на экране дисплея (17) общую работоспособность тренажера по состоянию контрольного индикатора и по сообщениям программы в главном меню в электронных текстовых и графических документах. Руководитель непрерывно контролирует действия обучаемого по изображению органов управления на экране дисплея (18) для отображения положения и состояния органов управления и средств индикации механика-водителя, и по положению МТЛБ на электронной карте местности на экране дисплея (17), а также наблюдая на экранах дисплеев (19), (20) внешний вид местности и изображение, совпадающее с изображением в имитаторе перископических приборов наблюдения механика-водителя (1). Во время выполнения упражнения руководитель имеет возможность с помощью оптического манипулятора (26) и клавиатуры (27) давать вводные Словарь военных терминов(///). о неисправности аппаратуры МТЛБ. Обучаемые, находящиеся вне тренажера, на большом экране коллективного пользования (21) наблюдают за действиями механика-водителя, находящегося в имитаторе рабочего места механика-водителя . Руководитель посредством голосовой связи обращает внимание на допущенные ошибки и неправильные действия обучаемого в тренажере(например превышение оборотов двигателя,превышение допустимой температуры охлаждающей жидкости, неподача сигнала о начале движения, падение давления масла в коробке передач). Ошибки обучаемого фиксируются программой тренажера и распечатываются в отчете на принтере (28). После завершения упражнения,при необходимости, происходит повторный показ записи выполнения упражнения на экране коллективного пользования (21) или на экранах дисплеев (18-20) АРМ руководителя занятий ,проводится разбор допущенных ошибок,объявляется оценка, которая фиксируется в электронной форме в виде последовательных кодов в протоколе и распечатывается на принтере (28). В программу тренажера встроены модули, при помощи которых автоматически фиксируют ошибочные действия обучаемого, нарушающие правила инструкции по эксплуатации МТЛБ, и сообщают об этом руководителю занятий на экранах дисплеев (17), (18). В тренажер встроена система электропитания тренажера (30), которая обеспечивает включение и выключение систем тренажера, питание их стабилизированным однофазным напряжением 220 В, 50 Гц по сети стабилизированного напряжения(36), бесперебойное питание системных блоков тренажера в течение 8 минут после пропадания напряжения во внешней питающей сети. Разработанный тренажер максимально полно имитирует интерьер рабочего места механикаводителя МТЛБ, включая систему управления машиной, приборы наблюдения, все переключатели,индикаторы, рукоятки, педали. При помощи тренажера, программных модулей и ПО возможно создание компьютерных моделей реальных участков местности. При этом обеспечивается моделирование ландшафта,объектов, шумов и звуковых эффектов движения машины и других объектов,имитируется нагружение рычагов,рукояток и органов управления МТЛБ в имитаторе щитка приборов механика-водителя(3),имитаторе педалей механика- водителя (4), имитаторе рычагов поворота (5), имитаторе рукояток и органов управления (6), качание и повороты имитатора рабочего места механика-водителя , необходимых для гарантирования совершенной технической и тактической подготовки водителей МТЛБ. Визуализация изображений производится с высоким(не хуже 1280 х 1024) разрешением. Таким образом, использование разработанного тренажера вождения позволяет решать следующие задачи а) отработку и закрепление навыков механиковводителей в использовании всего штатного оборудования рабочего места механика-водителя МТЛБ б) начальное обучение и совершенствование навыков механиков-водителей по вождению МТЛБ на различной местности, в условиях различной видимости и метеорологических условиях в) объективную оценку действий обучаемых г) моделирование в упражнениях таких условий вождения в реальном бою, которые недостижимы другими методами в мирных условиях боевой подготовки. Кроме того,повышение эффективности использования тренажера механика- водителя МТЛБ в сравнении с ближайшим аналогом достигается за счет улучшения реалистичности обучения, имитацией невозможных в мирное время ситуаций, увеличением числа степеней свободы динамической платформы. Апробация тренажера была успешно проведена в киевском НПО Энергия-2000 (Украина) в 20102011 г.г. и в алматинском ООО Алматыэнергосервис (Республика Казахстан) в 2011-2012 г.г.// ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Тренажер механика-водителя многоцелевого тягача, содержащий размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места механика-водителя с размещенными внутри него имитаторами средств управления,автоматизированное рабочее место руководителя занятий с программно-вычислительным комплексом с программным обеспечением, а также систему обмена данными, при этом элементы тренажера соединены между собой через локальную вычислительную сеть, отличающийся тем, что система имитаторов выполнена в виде имитатора рабочего места механика-водителя с размещенными внутри него имитаторами средств управления, имитатор рабочего места механикаводителясодержит систему визуализации в виде оптических приборов, которые выполнены с возможностью имитации характеристик реальных приборов наблюдения механика-водителя многоцелевого тягача легкого бронирование, а также имитатор отображения вида в смотровое окно механика-водителя(2),тренажер содержит подвижную динамическую платформу,выполненную с возможностью реализации шести степеней свободы, и связанную с имитатором рабочего места механика-водителя,автоматизированном рабочем месте руководителя занятийсодержит аппаратные программные модули,которые содержат программные обеспечения и программируемые логические интегральные схемы, поддерживающие зашивку алгоритмов реализации сценариев тренировок,алгоритмов объективного контроля и оценки обучаемого, алгоритмов объективного контроля и оценки руководителя, а также алгоритмов имитации рельефа реальной местности, при этом тренажер содержит цифровую сеть (12) передачи данных имитатора рабочего места механика-водителя ,сеть трактов (31) передачи видеосигналов, сеть передачи (33) имитированных звуков, сеть обмена(34) сигналами внутренней связи, а также сеть стабилизированного напряжения тренажера (36). 2. Тренажер по п.1, отличающийся тем, что цифровая сеть (12) передачи данных имитатора рабочего места механика-водителясоединяет в автоматизированно м рабоче м мес те руководителя занятийсистемный блок-резидент имитатора рабочего места механика-водителя (22), в имитаторе рабочего места механика-водителя- имитатор 7 щитка приборов механика-водителя (3), имитатор педалей механика-водителя (4), имитатор рычагов поворота (5), имитатор рукояток и органов управления (6), имитатор средств сигнализации и индикации (7), имитатор смотрового окна механикаводителя (8), устройство сопряжения приборов и органов управления механика-водителя (9), а в динамической платформе- устройство сопряжения динамической платформы (13), при этом в конструкцию имитатора рычагов поворота(5), имитатора рукояток и органов управления (6),имитатора педалей механика-водителя (4) введены устройства нагружения. 3. Тренажер по п.1, отличающийся тем, что сеть трактов (31) передачи видеосигналов соединена с системными блоками - графическими станциями тренажера (25), с системным блоком (24) с основным программным обеспечением и программными модулями,управляющими режимами работы тренажера, дисплеем (17) для отображения главного меню руководителя занятий,дисплеем (18) для отображения положения и состояния органов управления и средств индикации механика-водителя, дисплеем (19) для отображения внешнего вида на трассу вождения или на поле боя,дисплеем (20) для отображения изображения,наблюдаемого в перископическом приборе наблюдения механика-водителя и большим экраном коллективного пользования (21), входящими в состав автоматизированно м рабоче м мес те руководителя занятий , с имитатором (1) перископических приборов наблюдения механикаводителя и с имитатором (2) отображения вида в смотровое окно механика-водителя, входящих в состав имитатора рабочего места механика-водителя. 4. Тренажер по п.1, отличающийся тем, что сеть передачи (33) имитированных звуков соединена с системным блоком - сервером тренажера (23), с аудиосистемой (10) в имитаторе рабочего места механика-водителяи с аудиосистемой (32) в автоматизированно м рабоче м мес те руководителя занятий . 5. Тренажер по п.1, отличающийся тем, что сеть обмена сигналами внутренней связи (34) соединена с аппаратурой внутренней связи руководителя занятий (29) и механика-водителя (11). 6. Тренажер по п.1, отличающийся тем, что подвижная динамическая платформасодержит устройство сопряжения динамической платформы(13), а также в количестве шести штук каждые датчики положения динамической платформы (14),частотные преобразователи (15) и приводы (16) динамической платформы. 7. Тренажер по п.1, отличающийся тем, что локальная вычислительная сеть тренажера (35) выполнена с возможностью работы по протоколуи соединяет системный блок- сервер тренажера (23), системный блок (24) с основным программным обеспечением и программными модулями,управляющими режимами работы тренажера, системный блокрезидент имитатора рабочего места механикаводителя (22), системные блоки - графические станции тренажера (25), которые расположены в автоматизированном рабочем месте руководителя занятий .
МПК / Метки
МПК: G09B 9/00, F41G 3/00, G09B 9/04, G09B 7/00
Метки: легкого, тренажер, механика-водителя, млтб, бронирование, тягачя, многоцелевого
Код ссылки
<a href="https://kz.patents.su/8-u1021-trenazher-mehanika-voditelya-mnogocelevogo-tyagachya-legkogo-bronirovanie-mltb.html" rel="bookmark" title="База патентов Казахстана">Тренажер механика-водителя многоцелевого тягачя легкого бронирование (МЛТБ)</a>
Тренажер механика-водителя танка Т-72
Номер полезной модели: 1007
Опубликовано: 16.09.2013
Авторы: Матвиевский Александр Николаевич, Матвиевский Николай Александрович, Казеев Аркадий Евгеньевич, Касьян Владимир Иванович, Касьян Иван Александрович, Казеев Евгений Иванович, Бондаренко Тарас Григорьевич
МПК: G09B 9/00, F41G 3/00, G09B 7/00...
Метки: танка, тренажер, т-72, механика-водителя
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения механиков-водителей транспортных средств, танков и боевых машин, например, танка Т-72 или его модификаций, в ходе технической, огневой и тактической подготовки танковых подразделений Сухопутных войск.Тренажер механика-водителя танка Т-72 содержит размещенную на динамической платформе систему имитаторов в виде имитатора отделения...
Комплексный тренажер экипажа многоцелевого тягача легкого бронированного (МТЛБ) с боевым модулем
Номер полезной модели: 1004
Опубликовано: 16.09.2013
Авторы: Касьян Владимир Иванович, Казеев Евгений Иванович, Матвиевский Николай Александрович, Касьян Иван Александрович, Казеев Аркадий Евгеньевич, Матвиевский Александр Николаевич, Бондаренко Тарас Григорьевич
МПК: F41G 3/00, G09B 7/00, G09B 9/00...
Метки: легкого, мтлб, многоцелевого, боевым, экипажа, комплексный, модулем, бронированного, тягача, тренажер
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения экипажей многоцелевых тягачей лёгких бронированных с боевым модулем в составе командира, оператора и механика-водителя, в ходе технической, огневой и тактической подготовки мотострелковых (механизированных) подразделений Сухопутных войск.В комплексном тренажере экипажа многоцелевого тягача МТЛБ с боевым модулем, содержащем...
Тренажер водителя бронетранспортера БТР-80
Номер полезной модели: 1003
Опубликовано: 16.09.2013
Авторы: Бондаренко Тарас Григорьевич, Матвиевский Александр Николаевич, Касьян Иван Александрович, Казеев Евгений Иванович, Казеев Аркадий Евгеньевич, Касьян Владимир Иванович, Матвиевский Николай Александрович
МПК: F41G 3/00, G09B 9/00, G09B 7/00...
Метки: тренажер, бтр-80, бронетранспортера, водителя
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения водителей бронетранспортеров в составе командира, стрелка и водителя, в ходе боевой подготовки механизированных подразделений Сухопутных войск.В тренажере водителя БТР-80, содержащем размещенный на динамической платформе систему имитаторов в виде имитатора рабочего места водителя с размещенными внутри него имитаторами средств...
Комплексный тренажер экипажа боевой машины пехоты БМП-2
Номер полезной модели: 1005
Опубликовано: 16.09.2013
Авторы: Касьян Владимир Иванович, Казеев Евгений Иванович, Бондаренко Тарас Григорьевич, Казеев Аркадий Евгеньевич, Матвиевский Николай Александрович, Матвиевский Александр Николаевич, Касьян Иван Александрович
МПК: G09B 9/00, F41G 3/00, G09B 7/00...
Метки: бмп-2, машины, комплексный, экипажа, тренажер, боевой, пехоты
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, которые предназначены для обучения экипажей боевой машины пехоты в составе командира, оператора-наводчика и механика-водителя, в ходе боевой подготовки мотострелковых подразделений Сухопутных войск.Комплексный тренажер экипажа боевой машины пехоты БМП-2, содержит размещенную на подвижной динамической платформе систему имитаторов в виде имитаторов рабочих мест обучаемых с размещенными...
Комплексный тренажер экипажа бронетранспортера БТР-80
Номер полезной модели: 1002
Опубликовано: 16.09.2013
Авторы: Касьян Иван Александрович, Казеев Аркадий Евгеньевич, Касьян Владимир Иванович, Матвиевский Николай Александрович, Матвиевский Александр Николаевич, Казеев Евгений Иванович, Бондаренко Тарас Григорьевич
МПК: G09B 7/00, F41G 3/00, G09B 9/00...
Метки: комплексный, бтр-80, бронетранспортера, экипажа, тренажер
Формула / Реферат:
Полезная модель относится к автоматизированным средствам, а именно к тренажерам, которые предназначены для обучения расчетов бронетранспортеров в составе командира, стрелка и водителя, в ходе боевой подготовки механизированных подразделений Сухопутных войск.В комплексном тренажере экипажа бронетранспортера БТР-80, содержащем размещенную на динамической платформе систему имитаторов в виде имитаторов рабочих мест обучаемых с размещенными внутри...
Предыдущий патент: Устьевая шахта
Следующий патент: Тренажер для совместной подготовки лиц группы руководства полетами, офицеров боевого управления и пилотов летательных аппаратов
Случайный патент: Штамм клубеньковых бактерий Bradyrhizobium japonicum АКС-1, используемый для получения бактериального препарата под сою