Механизм привода ножевого аппарата уборочной машины
Номер инновационного патента: 24277
Опубликовано: 15.07.2011
Авторы: Бекенов Улан Ержанович, Жуматай Гани Сарсенбайулы, Смагулов Талгат Абдрахманович, Алексеек Алексей Алексеевич, Жортуылов Омирсерик Жортуылович, Адильшеев Ануарбек Суйнбекович
Формула / Реферат
Изобретение относится к сельскохозяйственному машиностроению, а именно, к приводу сегментно-пальцевых режущих аппаратов уборочных машин.
Технический результат, создаваемый изобретением, заключается в повышении надежности работы механизма.
Механизм привода режущего аппарата, содержит плиту-стойку, две поддерживающие звездочки, связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлены две звездочки и две охватывающих с обеих сторон цепи правой и левой части, расположенных в параллельных вертикальных плоскостях, каждая из которых взаимодействующая с одной из звездочек и прикрепленная одним концом к плите-стойке посредством винтовой тяги, имеющей возможность перемещения вдоль продольной оси и фиксирования ее длины.
Согласно изобретению механизм снабжен двумя дополнительными звездочками, размещенными соосно оси вращения кривошипа и симметрично горизонтальной плоскости, проходящей через ось вращения кривошипа, которые также охвачены цепями снизу вверх, причем оси поддерживающих и дополнительных звездочек размещены симметрично в горизонтальной и вертикальной плоскостях, проходящих через ось вращения кривошипа, диаметры всех звездочек равны, и одни концы каждой цепи закреплены к стойке с помощью винтовой тяги, продольная ось которой является продолжением касательной к линии делительной окружности дополнительной звездочки.
Текст
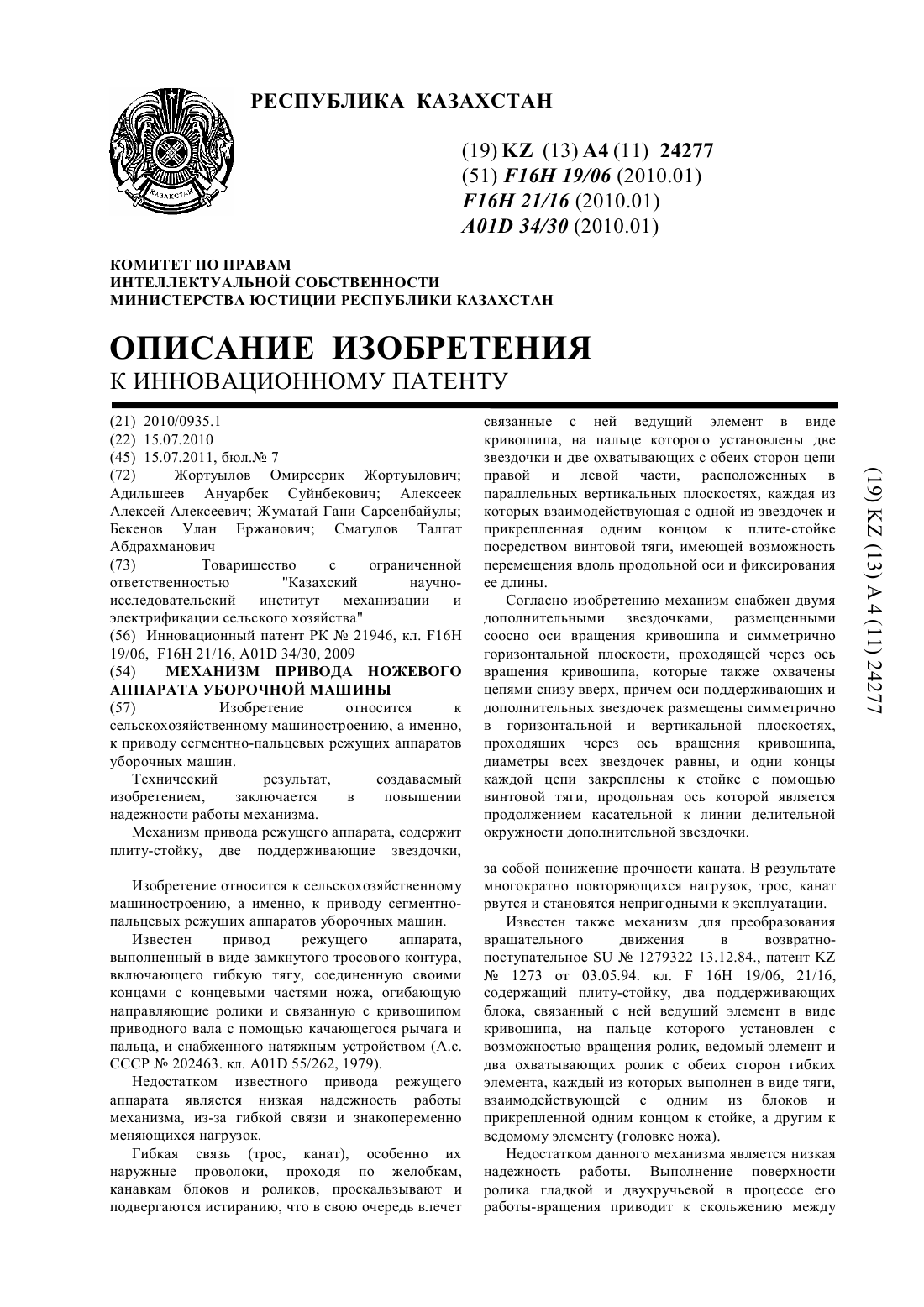
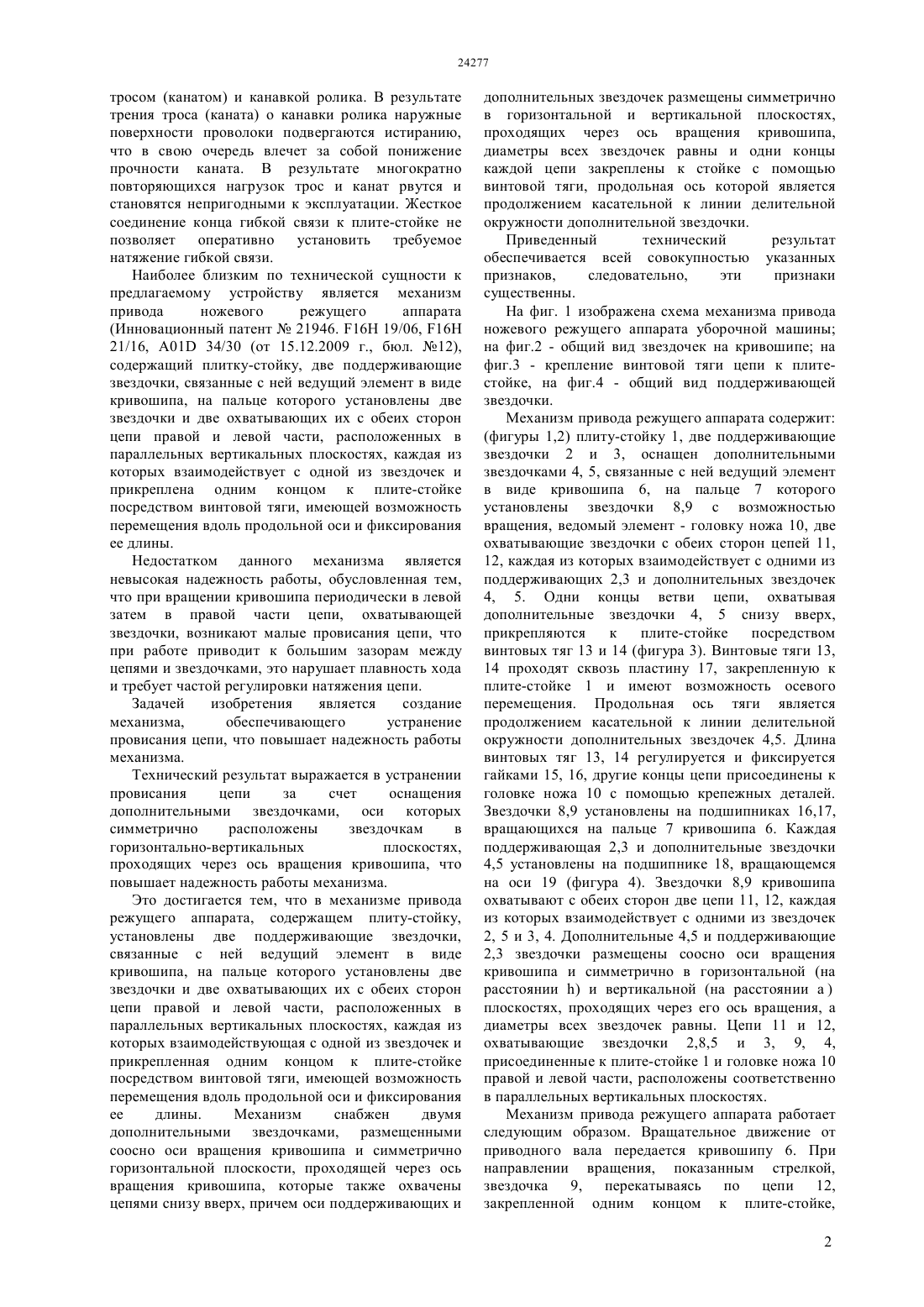
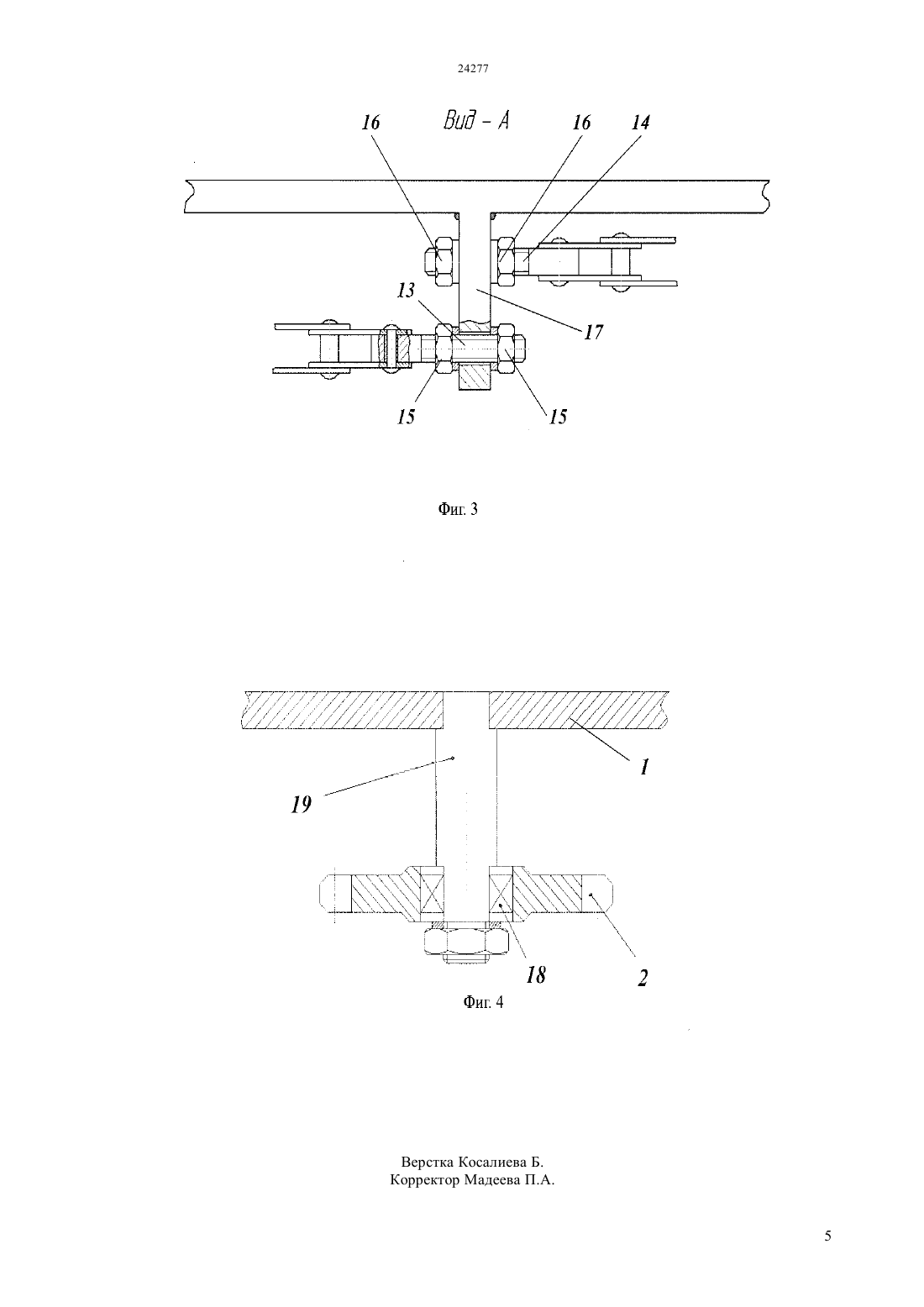
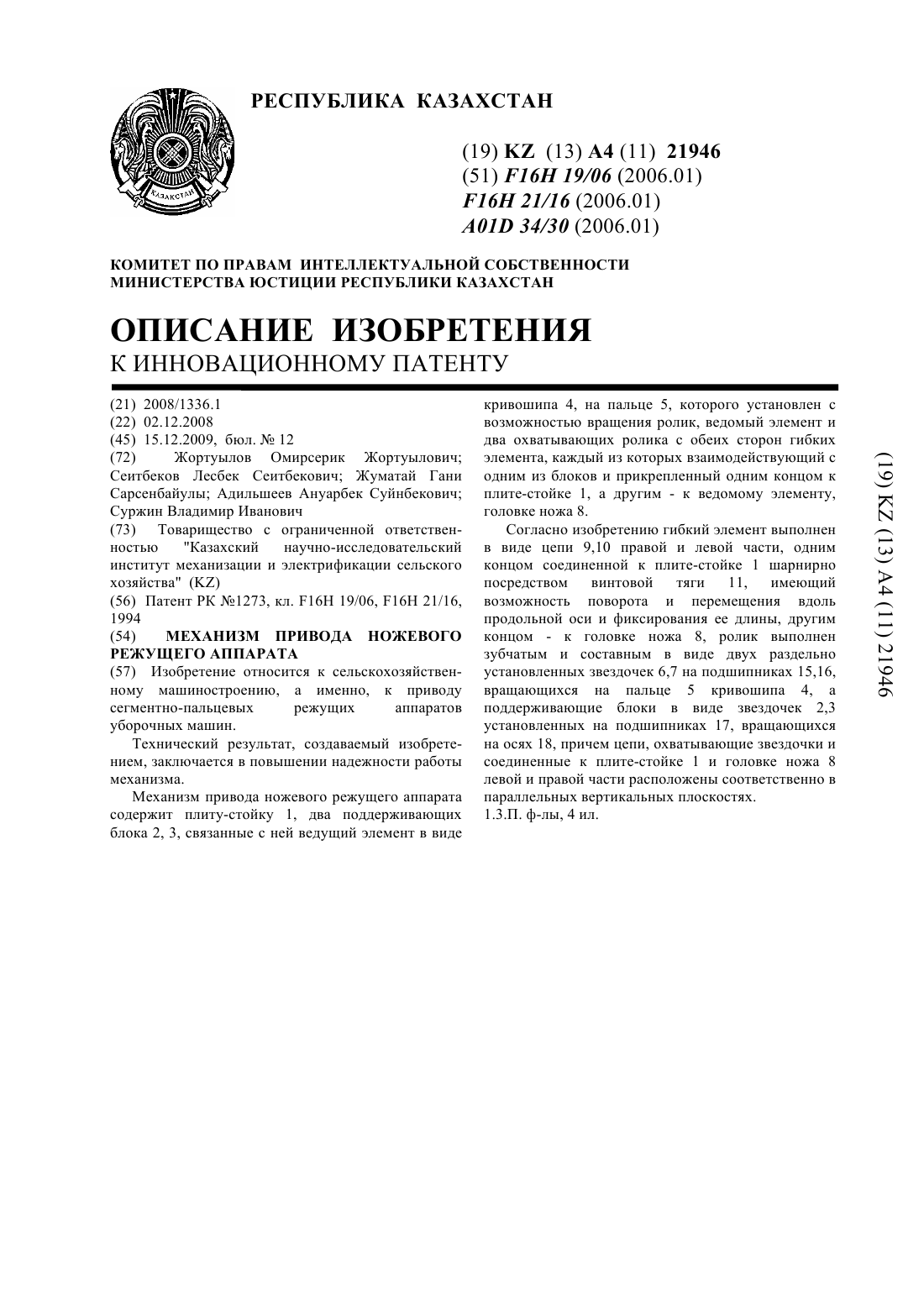
(51) 16 19/06 (2010.01) 16 21/16 (2010.01) 01 34/30 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН Изобретение относится к сельскохозяйственному машиностроению, а именно, к приводу сегментнопальцевых режущих аппаратов уборочных машин. Известен привод режущего аппарата,выполненный в виде замкнутого тросового контура,включающего гибкую тягу, соединенную своими концами с концевыми частями ножа, огибающую направляющие ролики и связанную с кривошипом приводного вала с помощью качающегося рычага и пальца, и снабженного натяжным устройством (А.с. СССР 202463. кл. А 01 55/262, 1979). Недостатком известного привода режущего аппарата является низкая надежность работы механизма, из-за гибкой связи и знакопеременно меняющихся нагрузок. Гибкая связь (трос, канат), особенно их наружные проволоки, проходя по желобкам,канавкам блоков и роликов, проскальзывают и подвергаются истиранию, что в свою очередь влечет связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлены две звездочки и две охватывающих с обеих сторон цепи правой и левой части, расположенных в параллельных вертикальных плоскостях, каждая из которых взаимодействующая с одной из звездочек и прикрепленная одним концом к плите-стойке посредством винтовой тяги, имеющей возможность перемещения вдоль продольной оси и фиксирования ее длины. Согласно изобретению механизм снабжен двумя дополнительными звездочками, размещенными соосно оси вращения кривошипа и симметрично горизонтальной плоскости, проходящей через ось вращения кривошипа, которые также охвачены цепями снизу вверх, причем оси поддерживающих и дополнительных звездочек размещены симметрично в горизонтальной и вертикальной плоскостях,проходящих через ось вращения кривошипа,диаметры всех звездочек равны, и одни концы каждой цепи закреплены к стойке с помощью винтовой тяги, продольная ось которой является продолжением касательной к линии делительной окружности дополнительной звездочки. за собой понижение прочности каната. В результате многократно повторяющихся нагрузок, трос, канат рвутся и становятся непригодными к эксплуатации. Известен также механизм для преобразования вращательного движения в возвратнопоступательное 1279322 13.12.84., патент 1273 от 03.05.94. кл.16 Н 19/06, 21/16,содержащий плиту-стойку, два поддерживающих блока, связанный с ней ведущий элемент в виде кривошипа, на пальце которого установлен с возможностью вращения ролик, ведомый элемент и два охватывающих ролик с обеих сторон гибких элемента, каждый из которых выполнен в виде тяги,взаимодействующей с одним из блоков и прикрепленной одним концом к стойке, а другим к ведомому элементу (головке ножа). Недостатком данного механизма является низкая надежность работы. Выполнение поверхности ролика гладкой и двухручьевой в процессе его работы-вращения приводит к скольжению между(72) Жортуылов Омирсерик Жортуылович Адильшеев Ануарбек Суйнбекович Алексеек Алексей Алексеевич Жуматай Гани Сарсенбайулы Бекенов Улан Ержанович Смагулов Талгат Абдрахманович(73) Товарищество с ограниченной ответственностью Казахский научноисследовательский институт механизации и электрификации сельского хозяйства(56) Инновационный патент РК 21946, кл. 16 19/06, 16 21/16, 01 34/30, 2009(54) МЕХАНИЗМ ПРИВОДА НОЖЕВОГО АППАРАТА УБОРОЧНОЙ МАШИНЫ(57) Изобретение относится к сельскохозяйственному машиностроению, а именно,к приводу сегментно-пальцевых режущих аппаратов уборочных машин. Технический результат,создаваемый изобретением,заключается в повышении надежности работы механизма. Механизм привода режущего аппарата, содержит плиту-стойку, две поддерживающие звездочки, 24277 тросом (канатом) и канавкой ролика. В результате трения троса (каната) о канавки ролика наружные поверхности проволоки подвергаются истиранию,что в свою очередь влечет за собой понижение прочности каната. В результате многократно повторяющихся нагрузок трос и канат рвутся и становятся непригодными к эксплуатации. Жесткое соединение конца гибкой связи к плите-стойке не позволяет оперативно установить требуемое натяжение гибкой связи. Наиболее близким по технической сущности к предлагаемому устройству является механизм привода ножевого режущего аппарата(Инновационный патент 21946. 16 19/06, 16 21/16, 01 34/30 (от 15.12.2009 г., бюл. 12),содержащий плитку-стойку, две поддерживающие звездочки, связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлены две звездочки и две охватывающих их с обеих сторон цепи правой и левой части, расположенных в параллельных вертикальных плоскостях, каждая из которых взаимодействует с одной из звездочек и прикреплена одним концом к плите-стойке посредством винтовой тяги, имеющей возможность перемещения вдоль продольной оси и фиксирования ее длины. Недостатком данного механизма является невысокая надежность работы, обусловленная тем,что при вращении кривошипа периодически в левой затем в правой части цепи, охватывающей звездочки, возникают малые провисания цепи, что при работе приводит к большим зазорам между цепями и звездочками, это нарушает плавность хода и требует частой регулировки натяжения цепи. Задачей изобретения является создание механизма,обеспечивающего устранение провисания цепи, что повышает надежность работы механизма. Технический результат выражается в устранении провисания цепи за счет оснащения дополнительными звездочками, оси которых симметрично расположены звездочкам в горизонтально-вертикальных плоскостях,проходящих через ось вращения кривошипа, что повышает надежность работы механизма. Это достигается тем, что в механизме привода режущего аппарата, содержащем плиту-стойку,установлены две поддерживающие звездочки,связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлены две звездочки и две охватывающих их с обеих сторон цепи правой и левой части, расположенных в параллельных вертикальных плоскостях, каждая из которых взаимодействующая с одной из звездочек и прикрепленная одним концом к плите-стойке посредством винтовой тяги, имеющей возможность перемещения вдоль продольной оси и фиксирования ее длины. Механизм снабжен двумя дополнительными звездочками, размещенными соосно оси вращения кривошипа и симметрично горизонтальной плоскости, проходящей через ось вращения кривошипа, которые также охвачены цепями снизу вверх, причем оси поддерживающих и дополнительных звездочек размещены симметрично в горизонтальной и вертикальной плоскостях,проходящих через ось вращения кривошипа,диаметры всех звездочек равны и одни концы каждой цепи закреплены к стойке с помощью винтовой тяги, продольная ось которой является продолжением касательной к линии делительной окружности дополнительной звездочки. Приведенный технический результат обеспечивается всей совокупностью указанных признаков,следовательно,эти признаки существенны. На фиг. 1 изображена схема механизма привода ножевого режущего аппарата уборочной машины на фиг.2 - общий вид звездочек на кривошипе на фиг.3 - крепление винтовой тяги цепи к плитестойке, на фиг.4 - общий вид поддерживающей звездочки. Механизм привода режущего аппарата содержит(фигуры 1,2) плиту-стойку 1, две поддерживающие звездочки 2 и 3, оснащен дополнительными звездочками 4, 5, связанные с ней ведущий элемент в виде кривошипа 6, на пальце 7 которого установлены звездочки 8,9 с возможностью вращения, ведомый элемент - головку ножа 10, две охватывающие звездочки с обеих сторон цепей 11,12, каждая из которых взаимодействует с одними из поддерживающих 2,3 и дополнительных звездочек 4, 5. Одни концы ветви цепи, охватывая дополнительные звездочки 4, 5 снизу вверх,прикрепляются к плите-стойке посредством винтовых тяг 13 и 14 (фигура 3). Винтовые тяги 13,14 проходят сквозь пластину 17, закрепленную к плите-стойке 1 и имеют возможность осевого перемещения. Продольная ось тяги является продолжением касательной к линии делительной окружности дополнительных звездочек 4,5. Длина винтовых тяг 13, 14 регулируется и фиксируется гайками 15, 16, другие концы цепи присоединены к головке ножа 10 с помощью крепежных деталей. Звездочки 8,9 установлены на подшипниках 16,17,вращающихся на пальце 7 кривошипа 6. Каждая поддерживающая 2,3 и дополнительные звездочки 4,5 установлены на подшипнике 18, вращающемся на оси 19 (фигура 4). Звездочки 8,9 кривошипа охватывают с обеих сторон две цепи 11, 12, каждая из которых взаимодействует с одними из звездочек 2, 5 и 3, 4. Дополнительные 4,5 и поддерживающие 2,3 звездочки размещены соосно оси вращения кривошипа и симметрично в горизонтальной (на расстоянии ) и вертикальной (на расстоянии а ) плоскостях, проходящих через его ось вращения, а диаметры всех звездочек равны. Цепи 11 и 12,охватывающие звездочки 2,8,5 и 3, 9, 4,присоединенные к плите-стойке 1 и головке ножа 10 правой и левой части, расположены соответственно в параллельных вертикальных плоскостях. Механизм привода режущего аппарата работает следующим образом. Вращательное движение от приводного вала передается кривошипу 6. При направлении вращения, показанным стрелкой,звездочка 9, перекатываясь по цепи 12,закрепленной одним концом к плите-стойке,2 захватывает и тянет набегающую на нее свободную ветвь цепи 12, звенья которой ложатся в углубления цепи и она не может соскользнуть с поверхности обода. Цепь 12, вращая звездочку 3, тянет головку ножа 10 в одну сторону, которая тянет за собой цепь 11. При этом звездочка 9 поворачивается и ветвь цепи 12, прикрепленная к плите-стойке 1, сбегает с нее, а ветвь цепи 11, прикрепленная к плите-стойке 1, набегает на звездочку 8. При повороте кривошипа 6 свыше 180 функции цепей 11,12 меняются. Кривошип 6 со звездочкой 8 начинает тянуть цепь 11, которая перемещает ведомый элемент, головку ножа 10 в противоположном направлении. Теперь ветвь цепи 11, прикрепленная к плите-стойке 1,сбегает со звездочки 8, а ветвь цепи 12 набегает на звездочку 9. За каждый оборот кривошипа 4 цикл повторяется и нож 10 совершает возвратнопоступательное движение, отклоняясь от среднего положения на величину приблизительно равную удвоенному радиусу кривошипа. Для точной установки головки ножа 10, т.е. точной установки ножа относительно оси пальца режущего аппарата, отворачиваются гайки 15 винтовой тяги 13 левой части плиты-стойки и заворачиваются гайки 16 винтовой тяги 14 правой части плиты-стойки. После установки головки ножа 10 относительно требуемого места закрепляются гайки 15,16 обеих винтовых тяг 13, 14. Установка двух дополнительных звездочек и размещение их и поддерживающих звездочек соосно в симметрично в горизонтальновертикальной плоскостях, проходящих через ось вращения кривошипа, и применение цепной передачи обеспечивает беззазорную работу цепи, что приводит к повышению работоспособности механизма в целом и плавности его хода, что приводит к повышению надежности работы механизма. ФОРМУЛА ИЗОБРЕТЕНИЯ Механизм привода режущего аппарата уборочной машины, содержащий плиту стойку, две поддерживающие звездочки, связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлены две звездочки и две охватывающих их с обеих сторон цепи правой и левой части, расположенных в параллельных вертикальных плоскостях, каждая из которых взаимодействующая с одной из звездочек и прикрепленная одним концом к плите-стойке посредством винтовой тяги, имеющей возможность перемещения вдоль продольной оси и фиксирования ее длины, отличающийся тем, что он снабжен двумя дополнительными звездочками,размещенными соосно оси вращения кривошипа и симметрично горизонтальной плоскости,проходящей через ось вращения кривошипа,которые также охвачены цепями снизу вверх,причем оси поддерживающих и дополнительных звездочек размещены симметрично в горизонтальной и вертикальной плоскостях,проходящих через ось вращения кривошипа,диаметры всех звездочек равны и одни концы каждой цепи закреплены к стойке с помощью винтовой тяги, а продольная ось является продолжением касательной к линии делительной окружности дополнительной звездочки.
МПК / Метки
МПК: F16H 21/16, F16H 19/06, A01D 34/30
Метки: уборочной, аппарата, ножевого, привода, механизм, машины
Код ссылки
<a href="https://kz.patents.su/5-ip24277-mehanizm-privoda-nozhevogo-apparata-uborochnojj-mashiny.html" rel="bookmark" title="База патентов Казахстана">Механизм привода ножевого аппарата уборочной машины</a>
Механизм привода ножевого режущего аппарата
Номер инновационного патента: 21946
Опубликовано: 15.12.2009
Автор: Жортуылов Омирсерик Жортуылович
МПК: A01D 34/30, F16N 21/16, F16H 19/06...
Метки: ножевого, привода, аппарата, механизм, режущего
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, а именно, к приводу сегментно-пальцевых режущих аппаратов уборочных машин.Технический результат, создаваемый изобрете-нием, заключается в повышении надежности работы механизма.Механизм привода ножевого режущего аппарата содержит плиту-стойку 1, два поддерживающих блока 2, 3, связанные с ней ведущий элемент в виде кривошипа 4, на пальце 5, которого установлен с возможностью вращения...
Механизм привода режущего аппарата уборочной машины
Номер инновационного патента: 21627
Опубликовано: 15.09.2009
Автор: Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30
Метки: аппарата, привода, машины, механизм, уборочной, режущего
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, а именно к механизмам привода режущих аппаратов уборочных машин. Технический результат выражается в устранении вибрации режущего аппарата уравновешиванием сил инерции ножа с силами инерции подвижного пальцевого бруса, движущегося в противоположном направлении движению ножа.Механизм привода режущего аппарата выполнен в виде замкнутого контура и содержит приводной вал 1 с кривошипом 2,...
Механизм привода двухножевого режущего аппарата уборочной машины
Номер инновационного патента: 23807
Опубликовано: 15.04.2011
Авторы: Жумагулов Жандос Боранбаевич, Адильшеев Ануарбек Суйнбекович, Жортуылов Омирсерик Жортуылович, Погуляев Александр Дмитриевич
МПК: A01D 34/02, A01D 34/30
Метки: режущего, механизм, привода, двухножевого, машины, уборочной, аппарата
Формула / Реферат:
Изобретение относится к области сельскохозяйственного машиностроения, а именно, к приводам двухножевых пальцевых и беспальцевых режущих аппаратов уборочных машин. Технический результат, достигаемый изобретением, заключается в создании универсального, простого по конструкции, неметаллоемкого и дешевого в изготовлении механизма привода двухножевого режущего аппарата косилок и жаток различных уборочных машин, а также в устранении момента упругого...
Механизм привода режущего аппарата уборочной машины
Номер предварительного патента: 6333
Опубликовано: 15.07.1998
Автор: Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30
Метки: уборочной, привода, режущего, механизм, аппарата, машины
Формула / Реферат:
Изобретение относится к сельскохозяйственному машиностроению.Повышение надежности рамы и улучшение условий работы оператора достигается тем, что механизм привода режущего аппарата уборочной машины, выполненный в виде замкнутого контура, содержит связанный с рамой машины пальцевый брус, нож, гибкую тягу, соединенную с концевыми частями ножа, выполненную в зонах изгиба замкнутого контура в виде двуплечих рычагов и связанную с кривошипом приводного...
Механизм привода режущего аппарата косилки и жатки
Номер инновационного патента: 24193
Опубликовано: 15.07.2011
Авторы: Жортуылов Омирсерик Жортуылович, Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30, A01D 34/33
Метки: жатки, аппарата, режущего, механизм, привода, косилки
Формула / Реферат:
Изобретение относится к сельскохозяйственному машиностроению, а именно к приводам режущих аппаратов косилок и жаток.Технический результат, создаваемый изобретением, заключается в повышении надежности работы и срока службы механизма.Механизм привода ножа режущего аппарата косилки и жатки содержит приводной вал, кривошип которого посредством шатуна соединен с коромыслом, один конец которого шарнирно соединен со стойкой, а другой кинематически...
Предыдущий патент: Состав для улавливания пыли обеспечивающий полное смачивание пылевых частиц
Следующий патент: Затвор обратный с гидротормозом
Случайный патент: Устройство для остеосинтеза вертельной области бедренной кости