Механизм привода ножевого режущего аппарата
Формула / Реферат
Изобретение относится к сельскохозяйствен-ному машиностроению, а именно, к приводу сегментно-пальцевых режущих аппаратов уборочных машин.
Технический результат, создаваемый изобрете-нием, заключается в повышении надежности работы механизма.
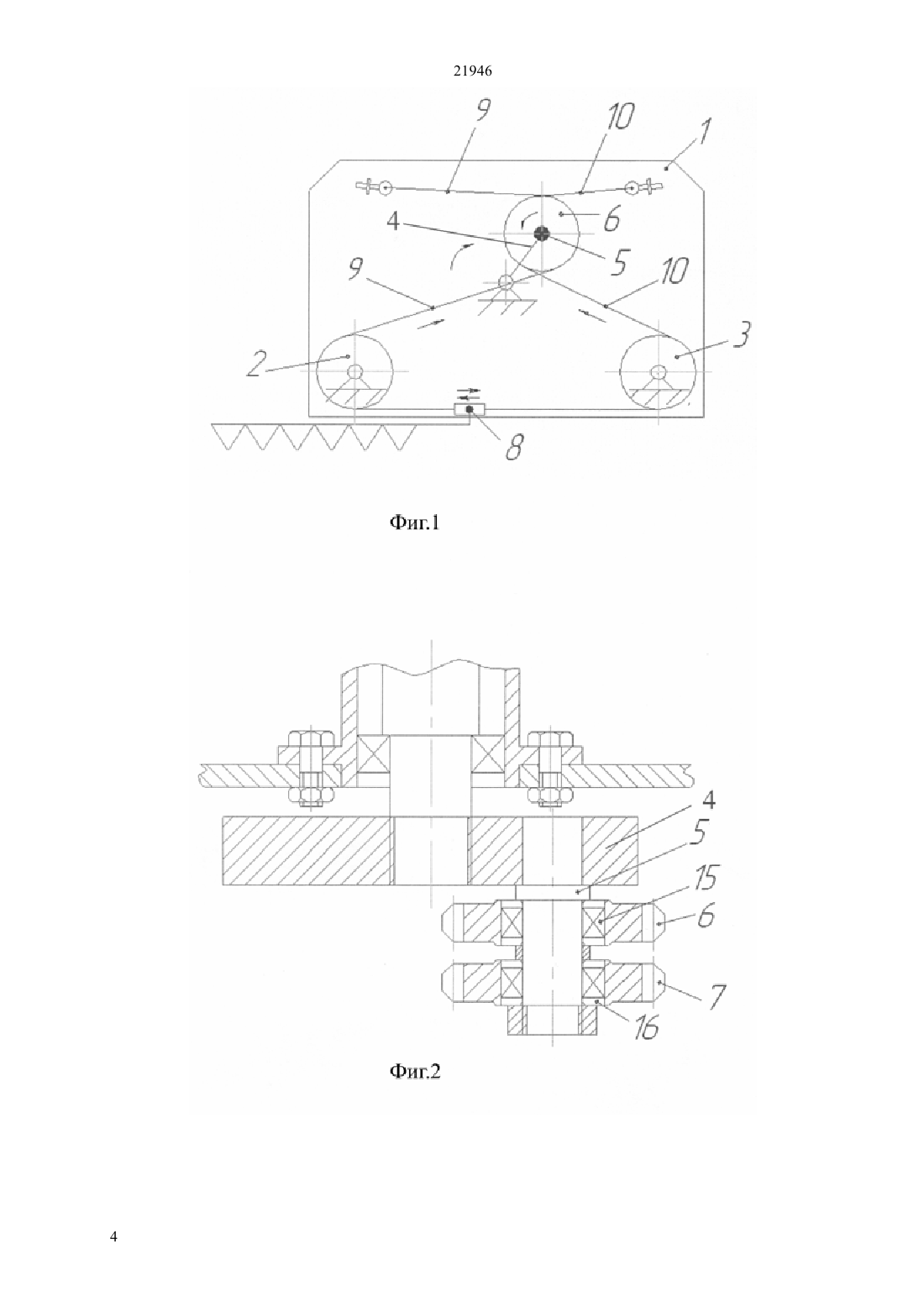
Механизм привода ножевого режущего аппарата содержит плиту-стойку 1, два поддерживающих блока 2, 3, связанные с ней ведущий элемент в виде кривошипа 4, на пальце 5, которого установлен с возможностью вращения ролик, ведомый элемент и два охватывающих ролика с обеих сторон гибких элемента, каждый из которых взаимодействующий с одним из блоков и прикрепленный одним концом к плите-стойке 1, а другим - к ведомому элементу, головке ножа 8.
Согласно изобретению гибкий элемент выполнен в виде цепи 9,10 правой и левой части, одним концом соединенной к плите-стойке 1 шарнирно посредством винтовой тяги 11, имеющий возможность поворота и перемещения вдоль продольной оси и фиксирования ее длины, другим концом - к головке ножа 8, ролик выполнен зубчатым и составным в виде двух раздельно установленных звездочек 6,7 на подшипниках 15,16, вращающихся на пальце 5 кривошипа 4, а поддерживающие блоки в виде звездочек 2,3 установленных на подшипниках 17, вращающихся на осях 18, причем цепи, охватывающие звездочки и соединенные к плите-стойке 1 и головке ножа 8 левой и правой части расположены соответственно в параллельных вертикальных плоскостях.
1.3.П. ф-лы, 4 ил.
Текст
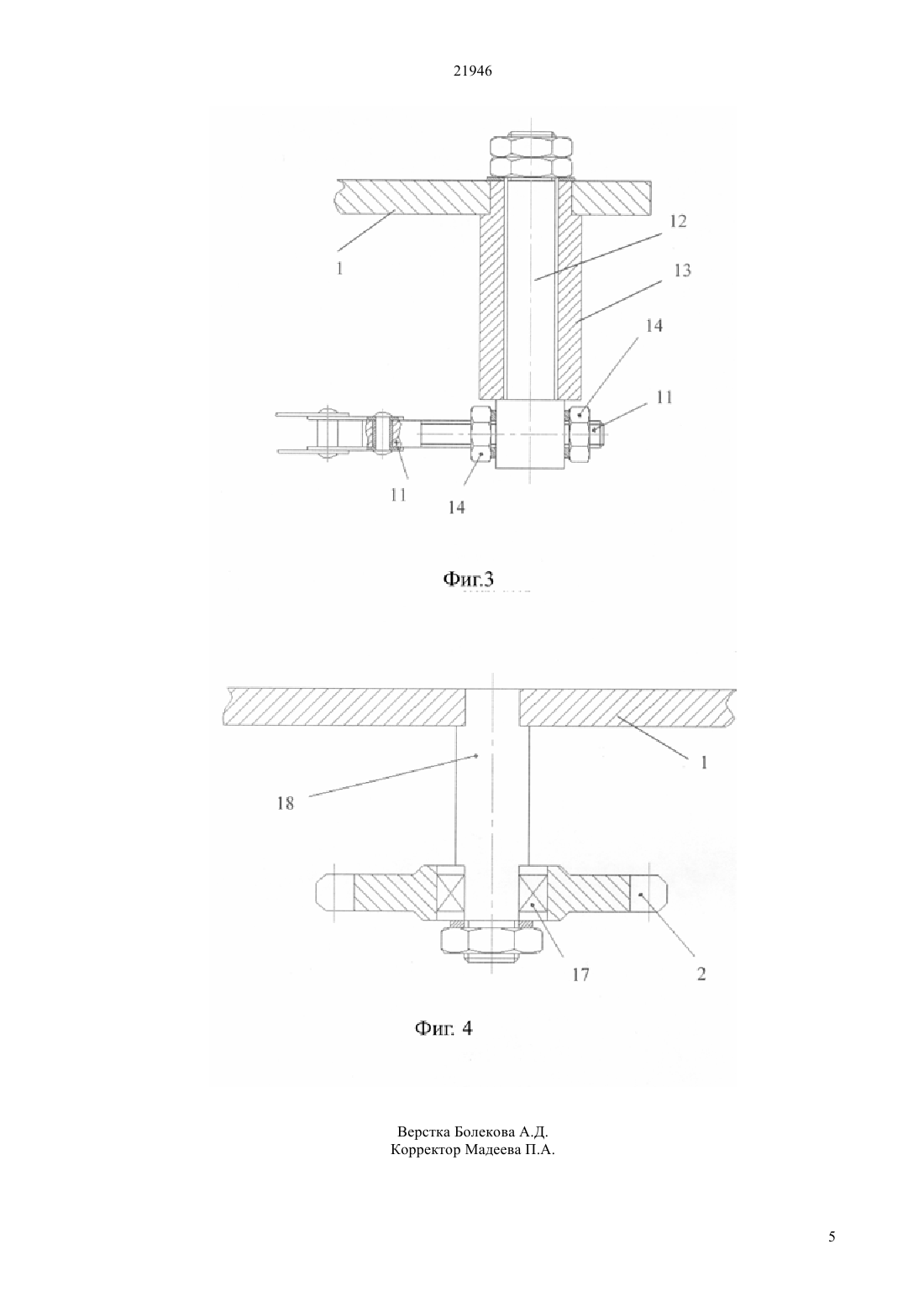
(51) 16 19/06 (2006.01) 16 Н 21/16 (2006.01) 01 34/30 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ кривошипа 4, на пальце 5, которого установлен с возможностью вращения ролик, ведомый элемент и два охватывающих ролика с обеих сторон гибких элемента, каждый из которых взаимодействующий с одним из блоков и прикрепленный одним концом к плите-стойке 1, а другим - к ведомому элементу,головке ножа 8. Согласно изобретению гибкий элемент выполнен в виде цепи 9,10 правой и левой части, одним концом соединенной к плите-стойке 1 шарнирно посредством винтовой тяги 11, имеющий возможность поворота и перемещения вдоль продольной оси и фиксирования ее длины, другим концом - к головке ножа 8, ролик выполнен зубчатым и составным в виде двух раздельно установленных звездочек 6,7 на подшипниках 15,16,вращающихся на пальце 5 кривошипа 4, а поддерживающие блоки в виде звездочек 2,3 установленных на подшипниках 17, вращающихся на осях 18, причем цепи, охватывающие звездочки и соединенные к плите-стойке 1 и головке ножа 8 левой и правой части расположены соответственно в параллельных вертикальных плоскостях. 1.3.П. ф-лы, 4 ил.(72) Жортуылов Омирсерик Жортуылович Сеитбеков Лесбек Сеитбекович Жуматай Гани Сарсенбайулы Адильшеев Ануарбек Суйнбекович Суржин Владимир Иванович(73) Товарищество с ограниченной ответственностью Казахский научно-исследовательский институт механизации и электрификации сельского хозяйства(54) МЕХАНИЗМ ПРИВОДА НОЖЕВОГО РЕЖУЩЕГО АППАРАТА(57) Изобретение относится к сельскохозяйственному машиностроению, а именно, к приводу сегментно-пальцевых режущих аппаратов уборочных машин. Технический результат, создаваемый изобретением, заключается в повышении надежности работы механизма. Механизм привода ножевого режущего аппарата содержит плиту-стойку 1, два поддерживающих блока 2, 3, связанные с ней ведущий элемент в виде 21946 Изобретение относится к сельскохозяйственному машиностроению, а именно, к приводу сегментнопальцевых режущих аппаратов уборочных машин. Известен привод режущего аппарата,выполненный в виде замкнутого тросового контура,включающего гибкую тягу, соединенную своими концами с концевыми частями ножа, огибающую направляющие ролики и связанную с кривошипом приводного вала с помощью качающегося рычага и пальца, и снабженного натяжным устройством (А.с. ЧССР 202463. кл. 01 55/262, 1979). Недостатком известного привода режущего аппарата является низкая надежность работы механизма, из-за гибкой связи и знакопеременно меняющихся нагрузок. Гибкая связь (трос, канат), особенно их наружные проволоки, проходя по желобкам,канавкам блоков и роликов, проскальзывают и подвергаются истиранию, что в свою очередь влечет за собой понижение прочности каната. В результате многократно повторяющихся нагрузок, трос, канат рвутся и становятся не пригодными к эксплуатации. Наиболее близким по технической сущности к предлагаемому устройству является механизм для преобразования вращательного движения в возвратно-поступательное 1279322 от 13.12.84 г., патент 1273 от 03.05.94. кл. 16 19/06, 21/16, содержащий плиту-стойку, два поддерживающих блока, связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлен с возможностью вращения ролик,ведомый элемент и два охватывающих ролик с обеих сторон гибких элемента, каждый из которых выполненный в виде тяги, взаимодействующей с одним из блоков и прикрепленной одним концом к стойке, а другим к ведомому элементу (головке ножа). Недостатком данного механизма является низкая надежность работы. Выполнение поверхности ролика гладкой и двухручьевой в процессе его работы - вращения приводит к скольжению между тросом (канатом) и канавкой ролика. В результате трения троса (каната) о канавки ролика наружные поверхности проволоки подвергаются истиранию,что в свою очередь влечет за собой понижение прочности каната. В результате многократно повторяющихся нагрузок трос и канат рвутся и становятся не пригодными к эксплуатации. Жесткое соединение конца гибкой связи к плите-стойке не позволяет оперативно установить требуемое натяжение гибкой связи. Задачей изобретения является создание механизма, обеспечивающего устранение износа роликов и трущихся поверхностей гибкой связи, что повышает надежность работы механизма. Технический результат выражается в устранении износа рабочих поверхностей гибкой связи выполнением передачи в виде цепи и звездочек, что повышает надежность работы механизма. Это достигается тем, что в механизме привода ножевого режущего аппарата, содержащим плитустойку, два поддерживающих блока, связанные с ней ведущий элемент в виде кривошипа, на пальце 2 которого установлен с возможностью вращения ролик, ведомый элемент и два охватывающих ролик с обеих сторон гибких элемента, каждый из которых взаимодействует с одним из поддерживающих блоков и прикрепленный одним концом к плитестойке, а другим к ведомому элементу, головке ножа, гибкий элемент выполнен в виде цепи правой и левой части одним концом соединенной к плитестойке шарнирно посредством винтовой тяги,имеющей возможность поворота и перемещения вдоль продольной оси и фиксирования ее длины,другим концом - к головке ножа, ролик выполнен зубчатым составным в виде двух раздельно установленных звездочек на подшипниках,вращающихся на пальце кривошипа,а поддерживающий блок - в виде звездочек,установленных на подшипниках, вращающийся на осях, причем цепи, охватывающие звездочки и соединенные к плите-стойке и головке ножа левой и правой части расположены соответственно в параллельных вертикальных плоскостях. Приведенный технический результат обеспечивается всей совокупностью указанных признаков,следовательно,эти признаки существенны. На фиг.1 изображена схема механизма привода ножевого режущего аппарата на фиг.2 - общий вид звездочек на кривошипе на фиг.3 - крепление винтовой тяги цепи к плите-стойке на фиг.4 общий вид поддерживающего блока. Механизм привода режущего аппарата содержит плиту-стойку 1, два поддерживающих блока 2 и 3 ,связанные с ней ведущий элемент в виде кривошипа 4, на пальце 5 которого установлены ролики 6, 7 с возможностью вращения, ведомый элемент, головку ножа 8, два охватывающих ролика и с обеих сторон гибких элемента 9,10, каждый из которых взаимодействует с одним из поддерживающих блоков 2,3. Каждый гибкий элемент выполнен в виде цепей. Одни концы ветви цепи соединены к плите-стойке шарнирно посредством винтовой тяги 11. Винтовая тяга 11 проходит сквозь палец 12, установленный во втулке 13, закрепленной к плите-стойке 1 и имеет возможность поворота относительно оси втулки 13 и перемещения поперек пальца 12. Длина винтовой тяги 11 регулируется и фиксируется гайками 14. Другие концы цепей соединены к головке ножа 8 с помощью крепежных деталей. Ролик выполнен зубчатым и составным в виде двух раздельно установленных звездочек 6,7 на подшипниках 15,16, вращающихся на пальце 5 кривошипа 4. Каждый поддерживающий блок выполнен зубчатым в виде звездочки,установленной на подшипнике 17, вращающейся на оси 18. Звездочки 6,7 кривошипа охватывают с обеих сторон две цепи 9,10, каждая из которых взаимодействует с одной из звездочек 2 и 3. Цепи 9 и 10, охватывающие звездочки 6, 7 и присоединенные к плите-стойке 1 и головке ножа 8 левой и правой части, расположены соответственно в параллельных вертикальных плоскостях. 21946 Механизм привода режущего аппарата работает следующим образом. Вращательное движение от приводного вала передается кривошипу 4. При направлении вращения, показанным стрелкой,звездочка 6, перекатываясь по цепи 9, закрепленной одним концом к плите-стойке, захватывает и тянет набегающую на нее свободную ветвь цепи 9, звенья которой ложатся в углубления и цепь не может соскользнуть с поверхности обода. Цепь 9, вращая звездочку 2, тянет головку ножа 8 в одну сторону,которая тянет за собой цепь 10. При этом звездочка 6 поворачивается и ветвь цепи 9, прикрепленная к плите-стойке 1, сбегает с нее, а ветвь цепи 10,прикрепленная к плите-стойке 1, набегает на звездочку 7. При повороте кривошипа 4 на 180 функции цепей 9,10 меняются. Кривошип 4 со звездочкой 7 начинает тянуть цепь 10, которая перемещает ведомый элемент, головку ножа 8 в противоположном направлении. Теперь ветвь цепи 10, прикрепленная к плите-стойке 1, сбегает со звездочки 7, а ветвь цепи 9 набегает на звездочку 6. За каждый оборот кривошипа 4 цикл повторяется, и нож 8 совершает возвратно-поступательное движение, отклоняясь от среднего положения на величину приблизительно равную удвоенному радиусу кривошипа. Для точной установки головки ножа 8, т.е. точной установки ножа относительно оси пальца режущего аппарата, отворачиваются гайки 14 винтовой тяги 11 левой части плиты-стойки и заворачиваются гайки 14 винтовой тяги 11 правой части плиты-стойки. После установки головки ножа 8 относительно требуемого места закрепляются гайки 14 обеих винтовых тяг 11. Предлагаемая конструкция механизма привода режущего аппарата обеспечивает плавную работу цепной передачи, что приводит к повышению надежности работы механизма. ФОРМУЛА ИЗОБРЕТЕНИЯ Механизм привода ножевого режущего аппарата,содержащий плиту-стойку, два поддерживающих блока, связанные с ней ведущий элемент в виде кривошипа, на пальце которого установлен с возможностью вращения ролик, ведомый элемент и два охватывающих ролика с обеих сторон гибких элемента, каждый из которых взаимодействующий с одним из блоков и прикрепленный одним концом к плите-стойке, а другим - к ведомому элементу,головку ножа, отличающийся тем, что гибкий элемент выполнен в виде цепи правой и левой части, одним концом соединенной к плите-стойке шарнирно посредством винтовой тяги, имеющей возможность поворота и перемещения вдоль продольной оси и фиксирования ее длины, другим концом - к головке ножа, ролик выполнен зубчатым и составным в виде двух раздельно установленных звездочек на подшипниках, вращающихся на пальце кривошипа, а поддерживающие блоки в виде звездочек,установленных на подшипниках,вращающихся на осях, причем цепи, охватывающие звездочки и соединенные к плите-стойке и головке ножа левой и правой части расположены соответственно в параллельных вертикальных плоскостях.
МПК / Метки
МПК: F16N 21/16, A01D 34/30, F16H 19/06
Метки: аппарата, механизм, привода, режущего, ножевого
Код ссылки
<a href="https://kz.patents.su/5-ip21946-mehanizm-privoda-nozhevogo-rezhushhego-apparata.html" rel="bookmark" title="База патентов Казахстана">Механизм привода ножевого режущего аппарата</a>
Механизм привода режущего аппарата уборочной машины
Номер предварительного патента: 6333
Опубликовано: 15.07.1998
Автор: Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30
Метки: аппарата, привода, машины, режущего, механизм, уборочной
Формула / Реферат:
Изобретение относится к сельскохозяйственному машиностроению.Повышение надежности рамы и улучшение условий работы оператора достигается тем, что механизм привода режущего аппарата уборочной машины, выполненный в виде замкнутого контура, содержит связанный с рамой машины пальцевый брус, нож, гибкую тягу, соединенную с концевыми частями ножа, выполненную в зонах изгиба замкнутого контура в виде двуплечих рычагов и связанную с кривошипом приводного...
Механизм привода режущего аппарата уборочной машины
Номер инновационного патента: 21627
Опубликовано: 15.09.2009
Автор: Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30
Метки: привода, машины, механизм, уборочной, аппарата, режущего
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, а именно к механизмам привода режущих аппаратов уборочных машин. Технический результат выражается в устранении вибрации режущего аппарата уравновешиванием сил инерции ножа с силами инерции подвижного пальцевого бруса, движущегося в противоположном направлении движению ножа.Механизм привода режущего аппарата выполнен в виде замкнутого контура и содержит приводной вал 1 с кривошипом 2,...
Устройство привода режущего аппарата прицепной валковой жатки
Номер предварительного патента: 13092
Опубликовано: 16.06.2003
Авторы: Грибенко Вячеслав Алексеевич, Жилкайдаров Айтжан Жумабекович, Иорданская Раиса Васильевна, Маселов Серик Ибраевич, Ким Валерий Михайлович
МПК: A01D 34/30
Метки: режущего, аппарата, привода, валковой, прицепной, жатки, устройство
Формула / Реферат:
Изобретение относится к устройству привода режущего аппарата прицепной валковой жатки. Для обеспечения компактности жатки и универсальности ее применения в устройстве привода режущего аппарата прицепной валковой жатки, включающем вал кривошипа, кривошип, шатун, коромысло, кинематически связанное с головкой ножевого полотна, согласно изобретению, вал кривошипа установлен вертикально, а коромысло выполнено в виде одноплечего рычага, на котором...
Механизм навески режущего аппарата косилки
Номер предварительного патента: 3941
Опубликовано: 16.12.1996
Авторы: Валов Николай Рафаилович, Иманмадиров Абайхан Умуржанович, Милюшин Владимир Семенович, Дужий Леонид Николаевич
МПК: A01D 34/86
Метки: косилки, аппарата, режущего, навески, механизм
Формула / Реферат:
Изобретение относится к сельскохозяйственному машиностроению, а именно, к косилкам.
Технический результат - упрощение конструкции и снижение материалоемкости косилки.
Для этого в механизме навески режущего аппарата косилки содержащем тяговую штангу, режущий аппарат, рычаг подъема и тягу, последняя закреплена непосредственно на режущем аппарате, и поэтому соотношение расстояний "в" и "с" позволяет исключить все промежуточные элементы.
Привод режущего аппарата жатки
Номер инновационного патента: 21754
Опубликовано: 15.10.2009
Авторы: Абилжан улы Токтар, Абилжанов Данияр Токтарович, Приходько Александр Еремеевич, Заичко Григорий Анатольевич
МПК: A01D 34/30
Метки: жатки, аппарата, привод, режущего
Формула / Реферат:
Изобретение относится к области сельскохозяйственного машиностроения, в частности к режущим аппаратам зерноуборочных и кормоуборочных машин.Технической задачей изобретения является устранение отмеченных недостатков, повышение надежности работы устройства и уменьшение динамических нагрузок при возвратно-поступательном движении ножа, которая достигается за счет того, что шатуны 5 размещены с двух сторон и выполнены в виде разъемных элементов...
Предыдущий патент: Центробежно-струйный насос Абдураманова
Следующий патент: Способ локализации и остановки протяженного разрушения магистральных газопроводов
Случайный патент: Устройство для термообработки деталей