Рычажное устройство с подвижной опорой и пресс
Формула / Реферат
Изобретение относится к машиностроению, а именно к рычажному устройству с подвижной опорой и к прессу, в котором оно используется. Сущность: в рычажном устройстве с подвижной опорой для оси качания рычага эта опора установлена с возможностью свободного перемещения, связь между осью качания рычага и рычагом выполнена с фиксацией от их взаимного относительного поступательного перемещения в плоскости качания рычага и с обеспечением возможности поступательного движения рычага одновременно с его качательным движением при перемещении опоры в процессе работы. 2 с. и 2 зп. ф-лы, 36 ил.
Текст
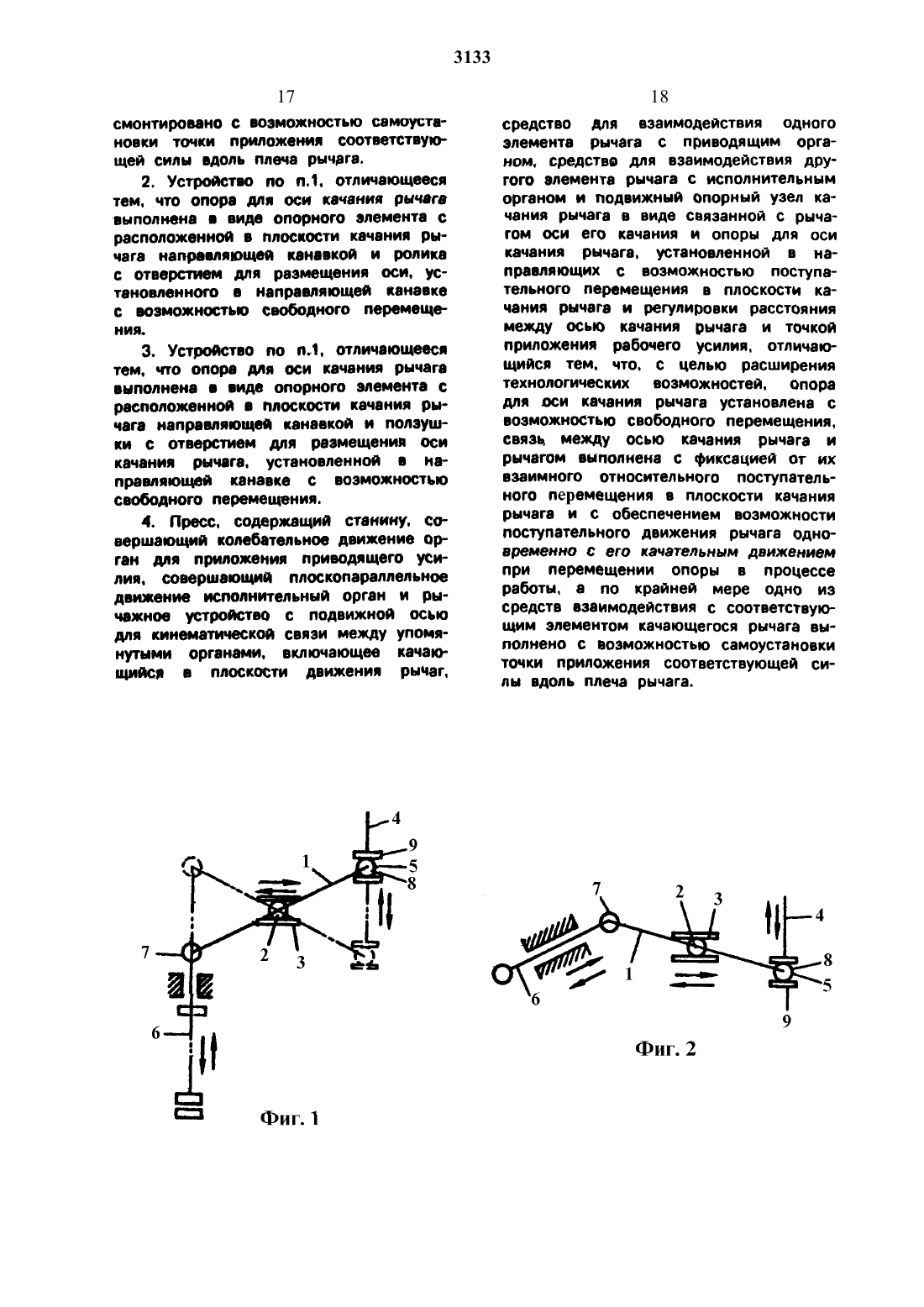
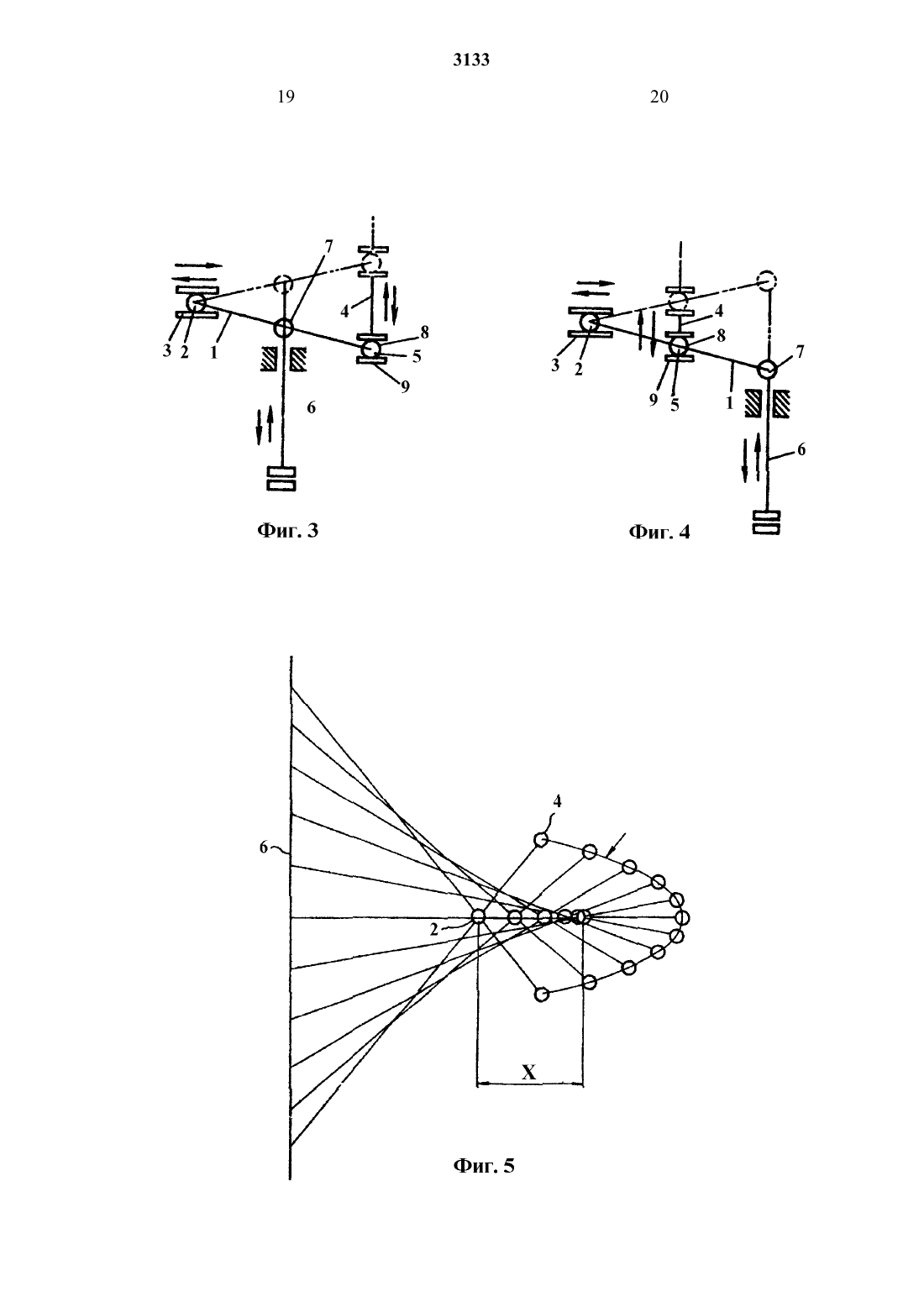
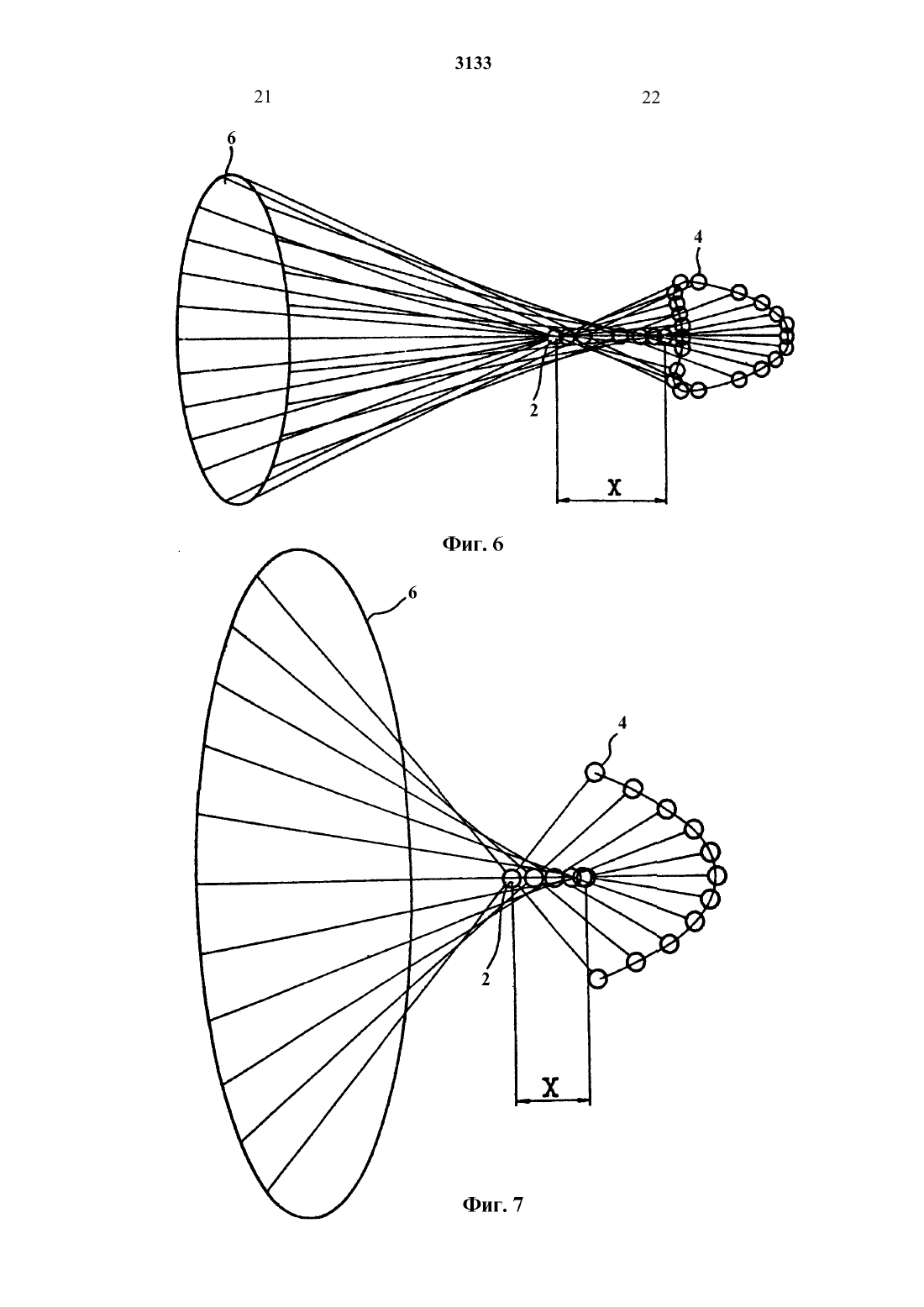
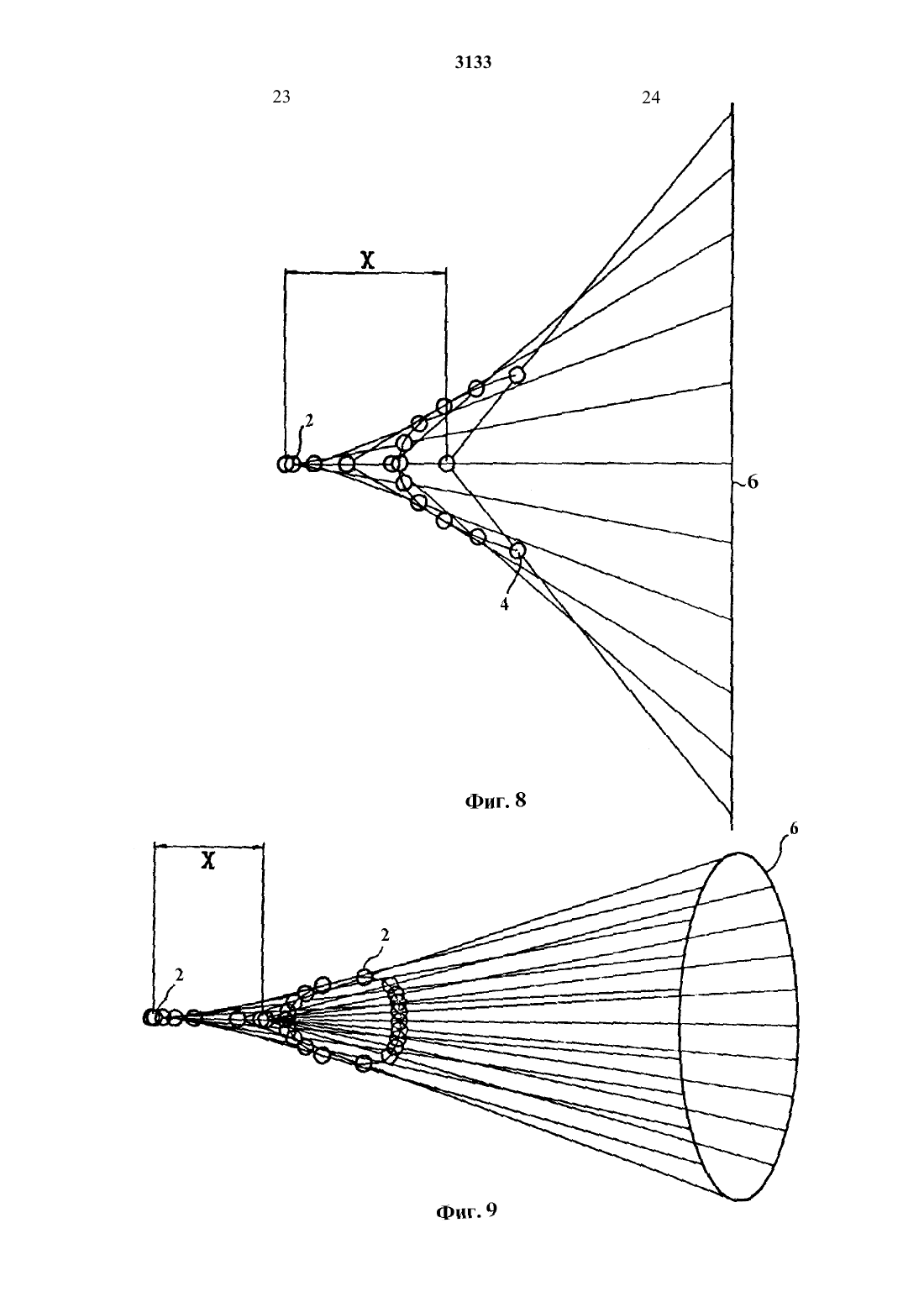
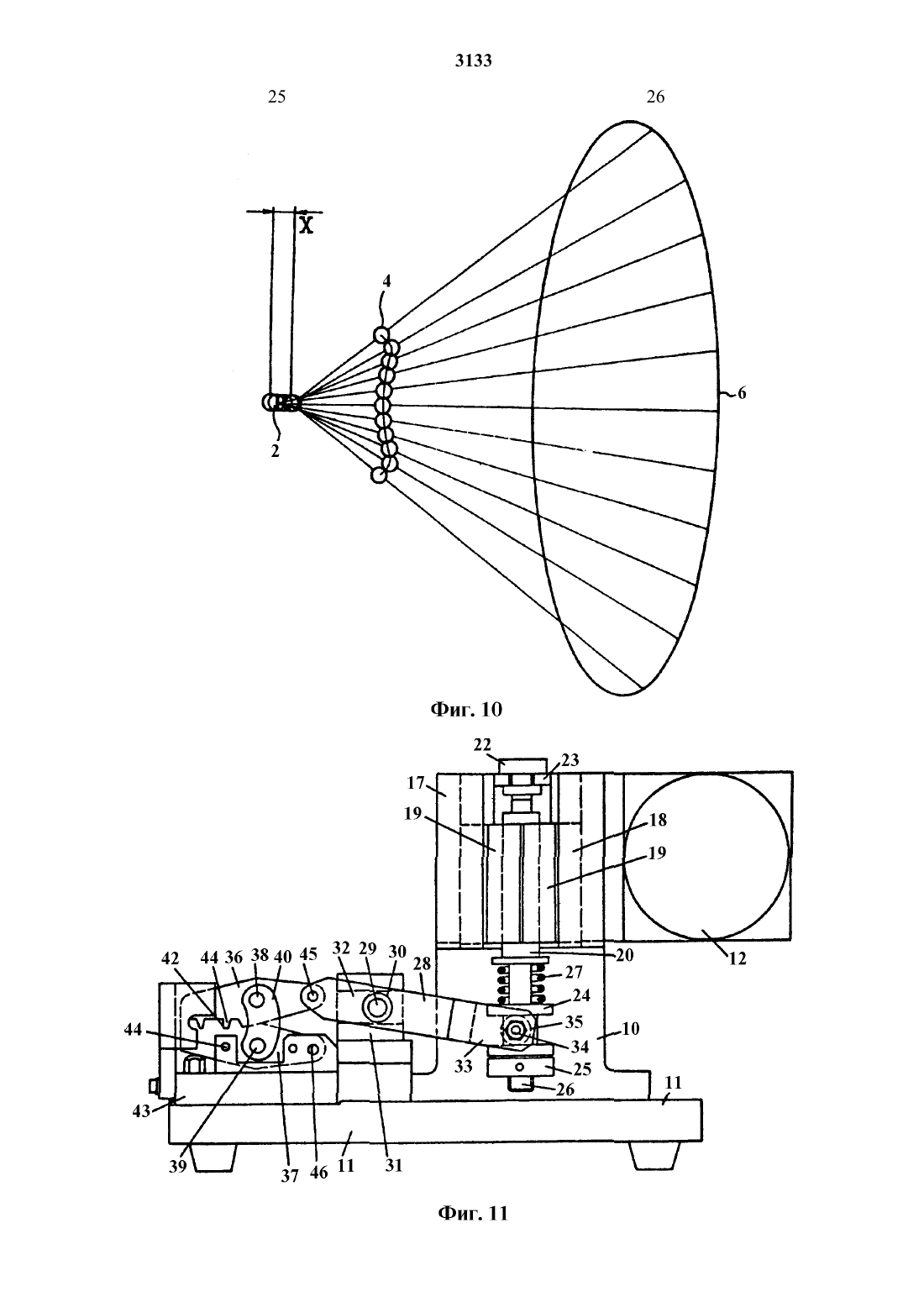
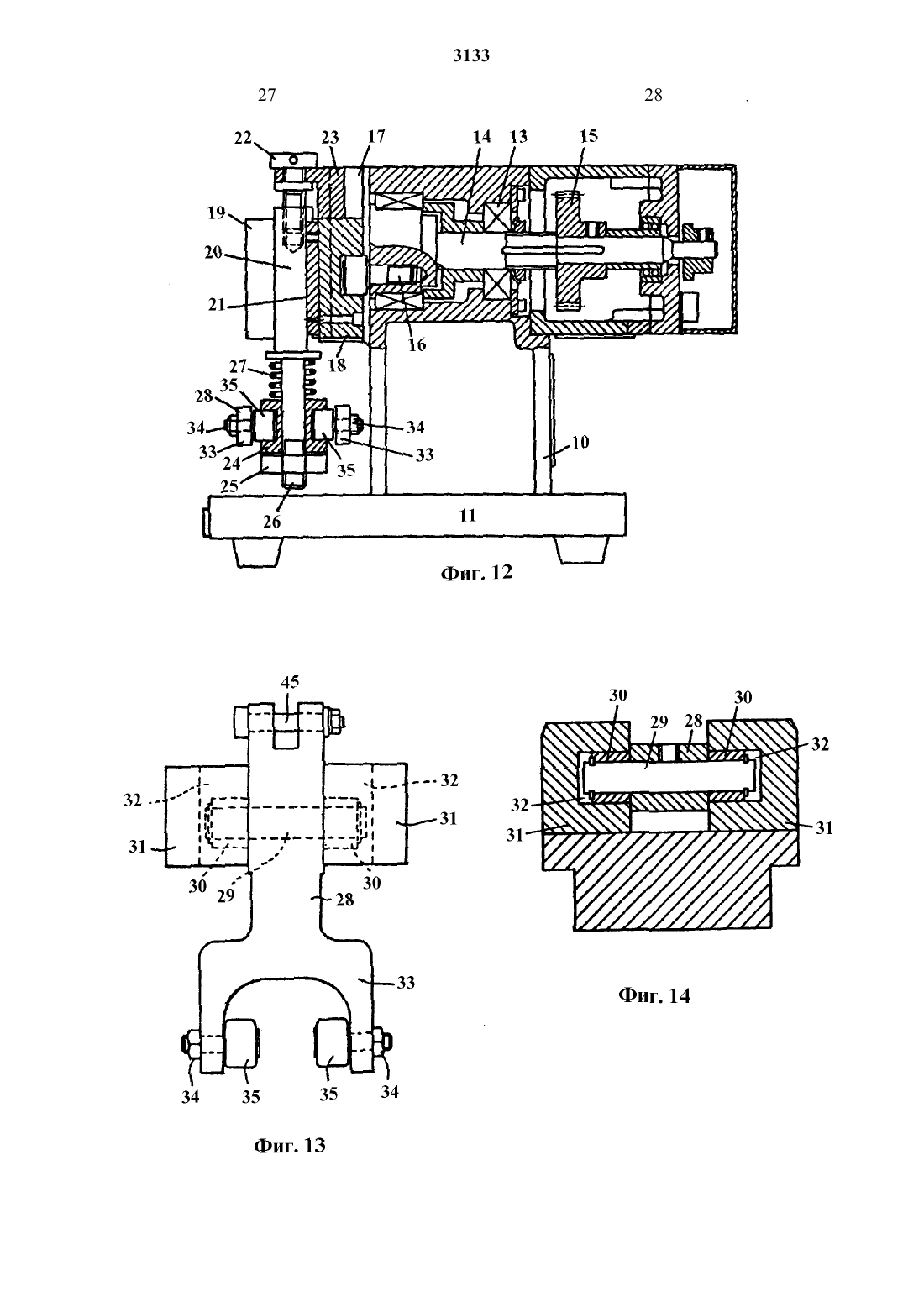
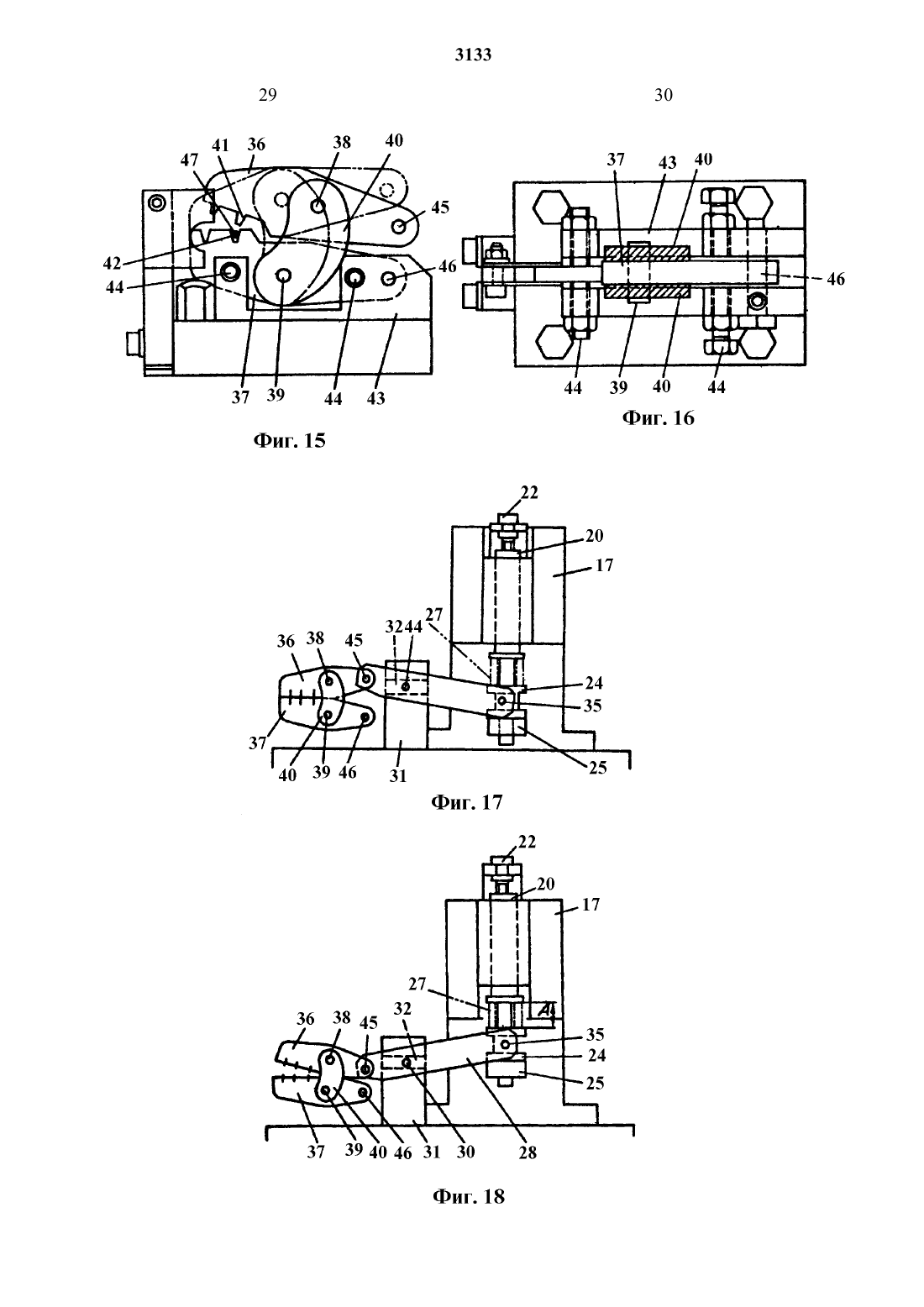
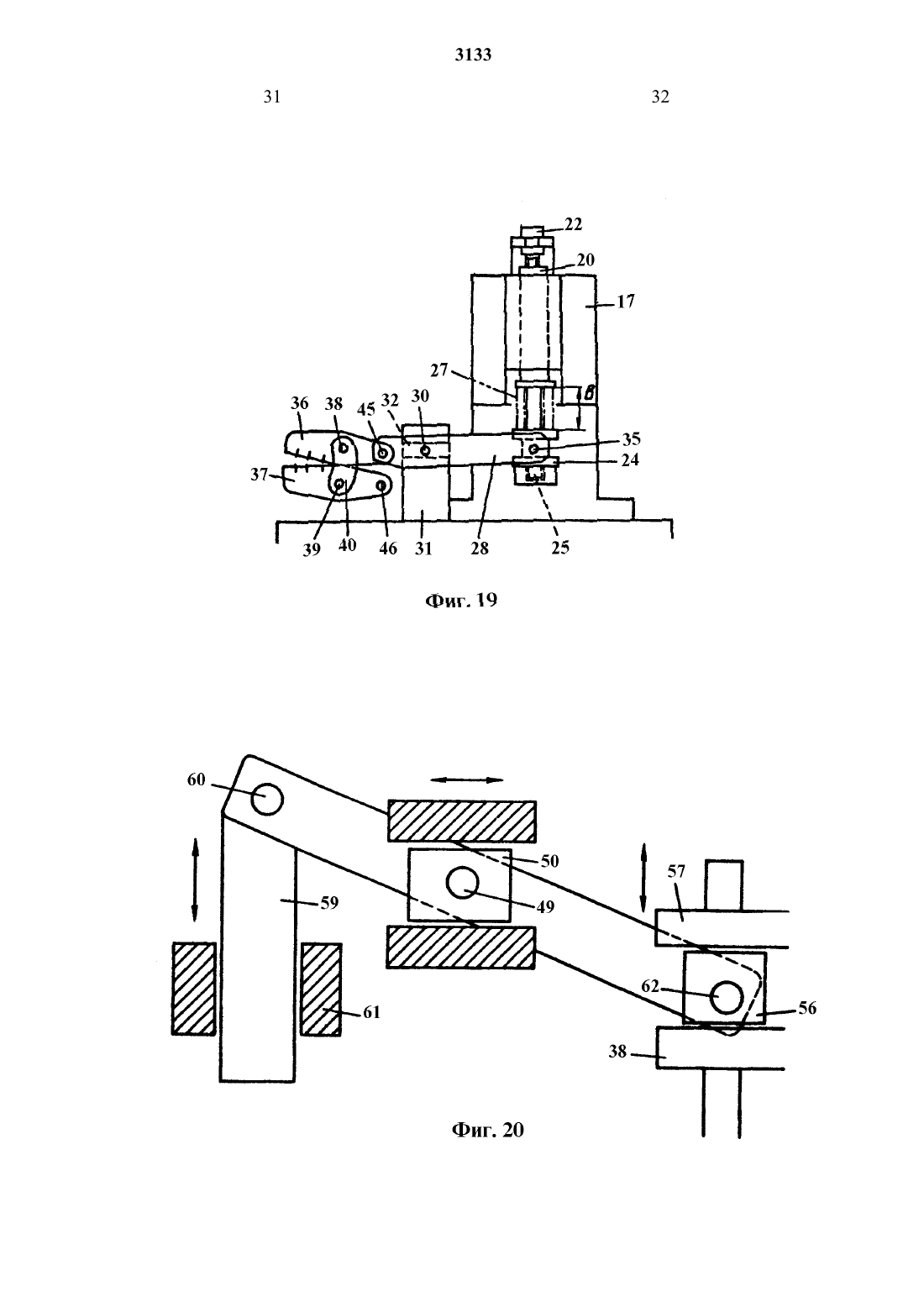
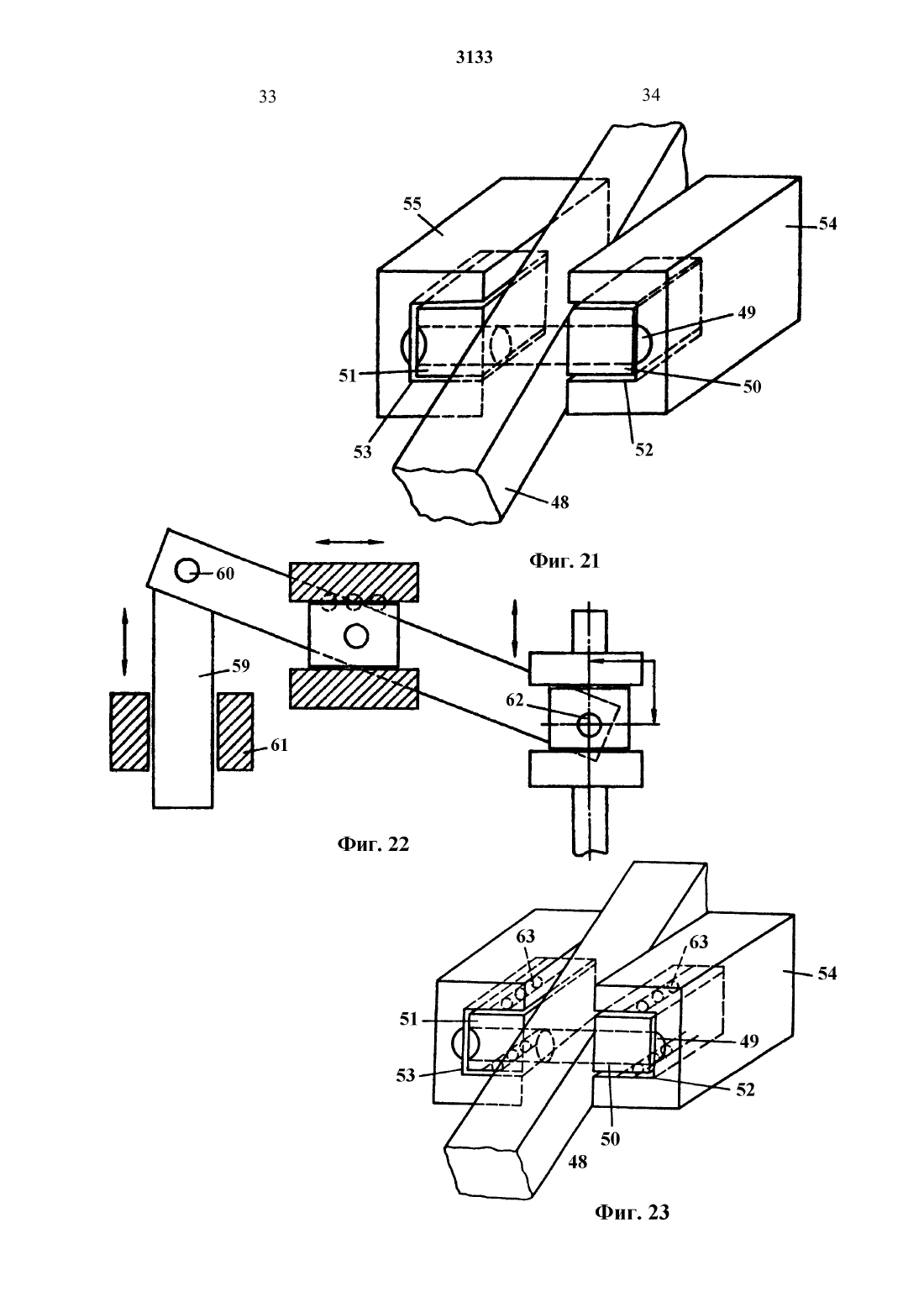
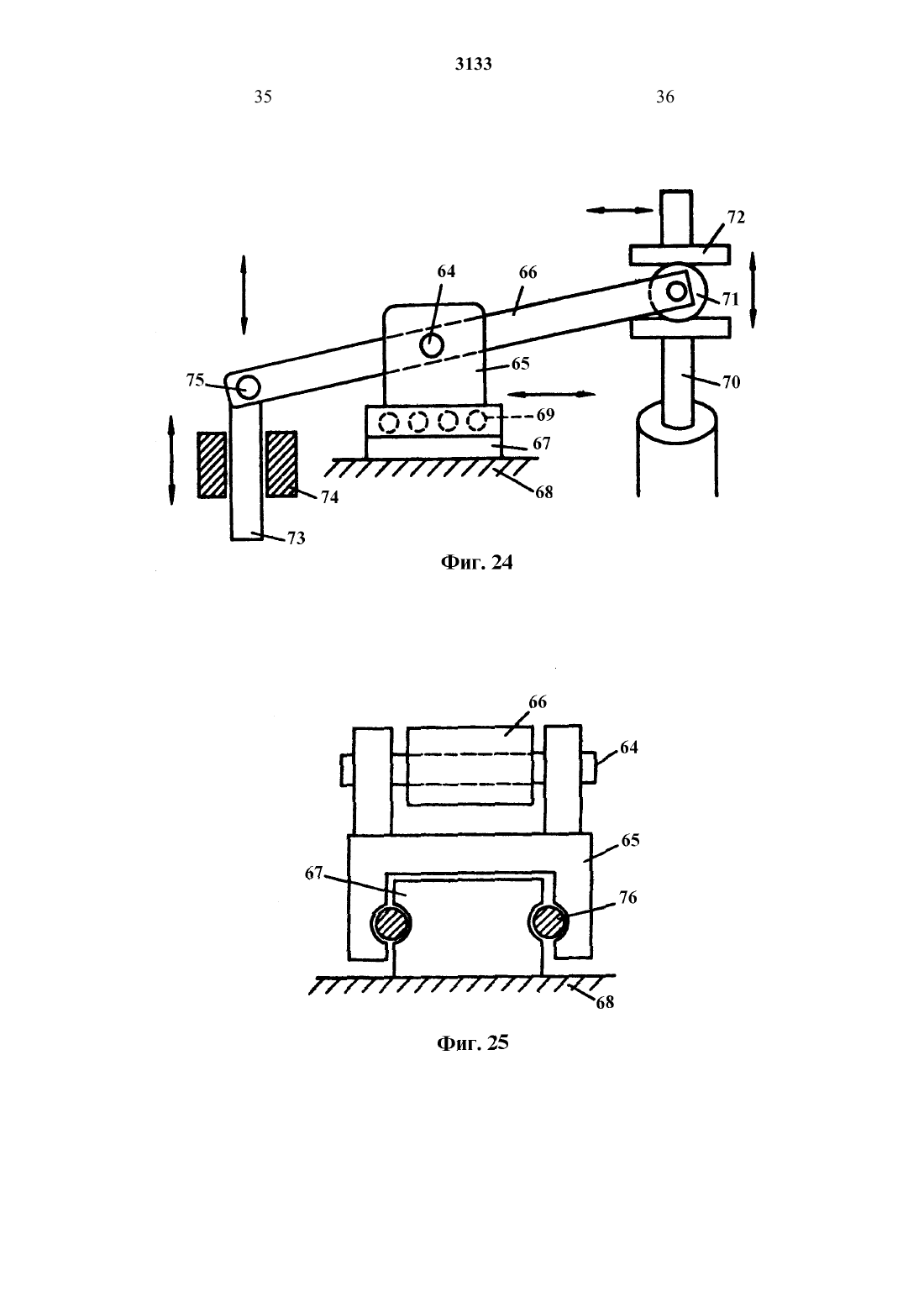
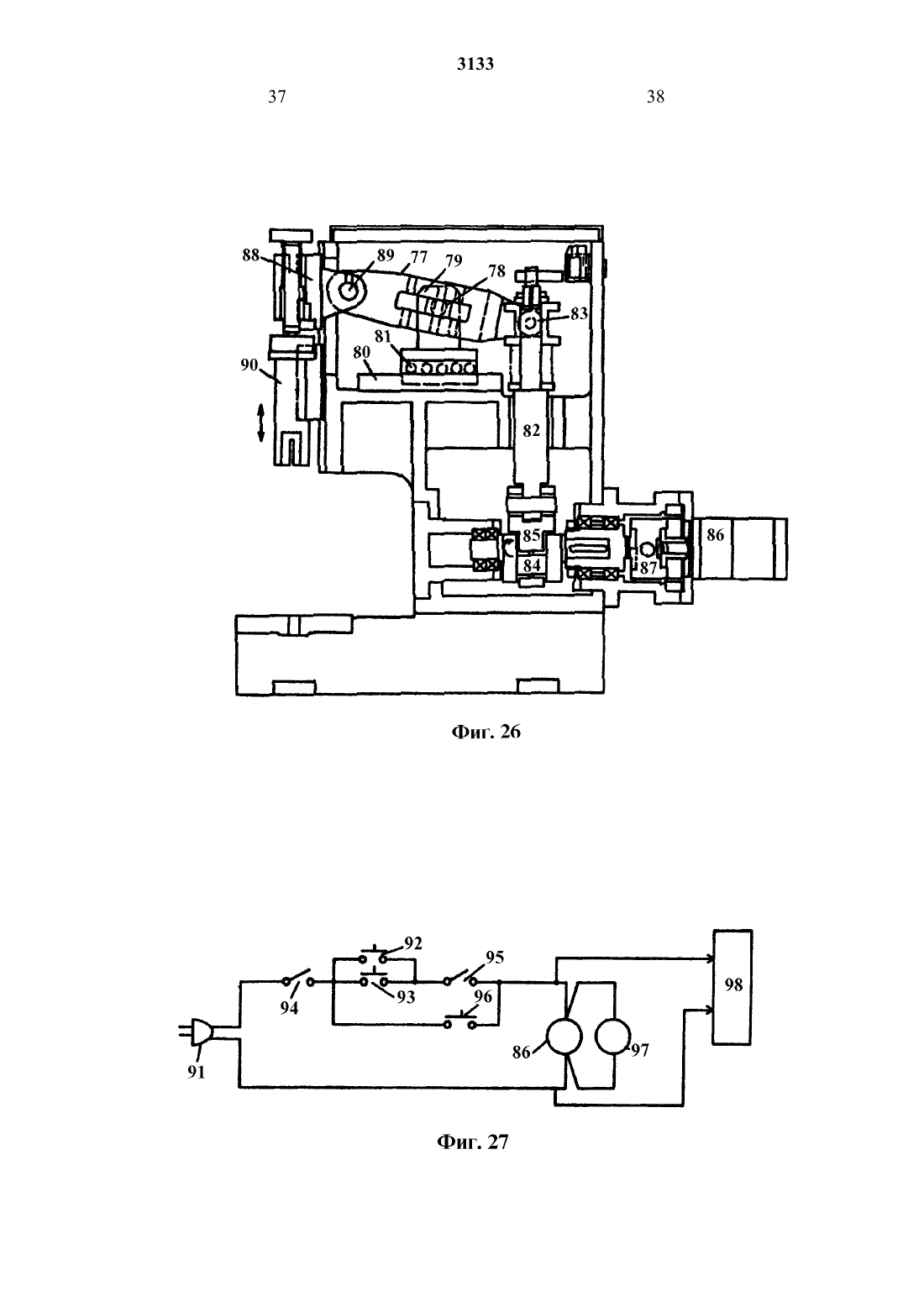
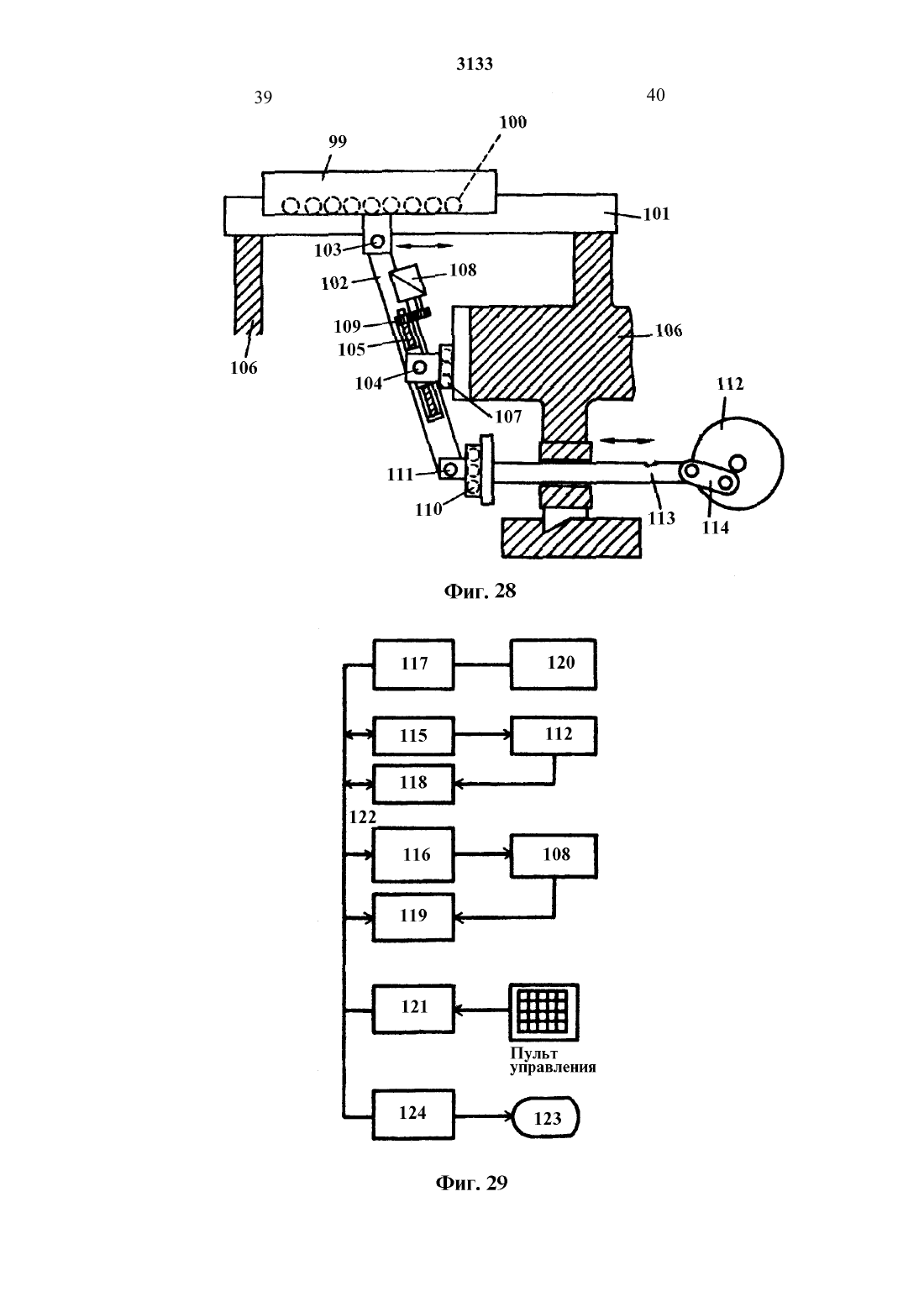
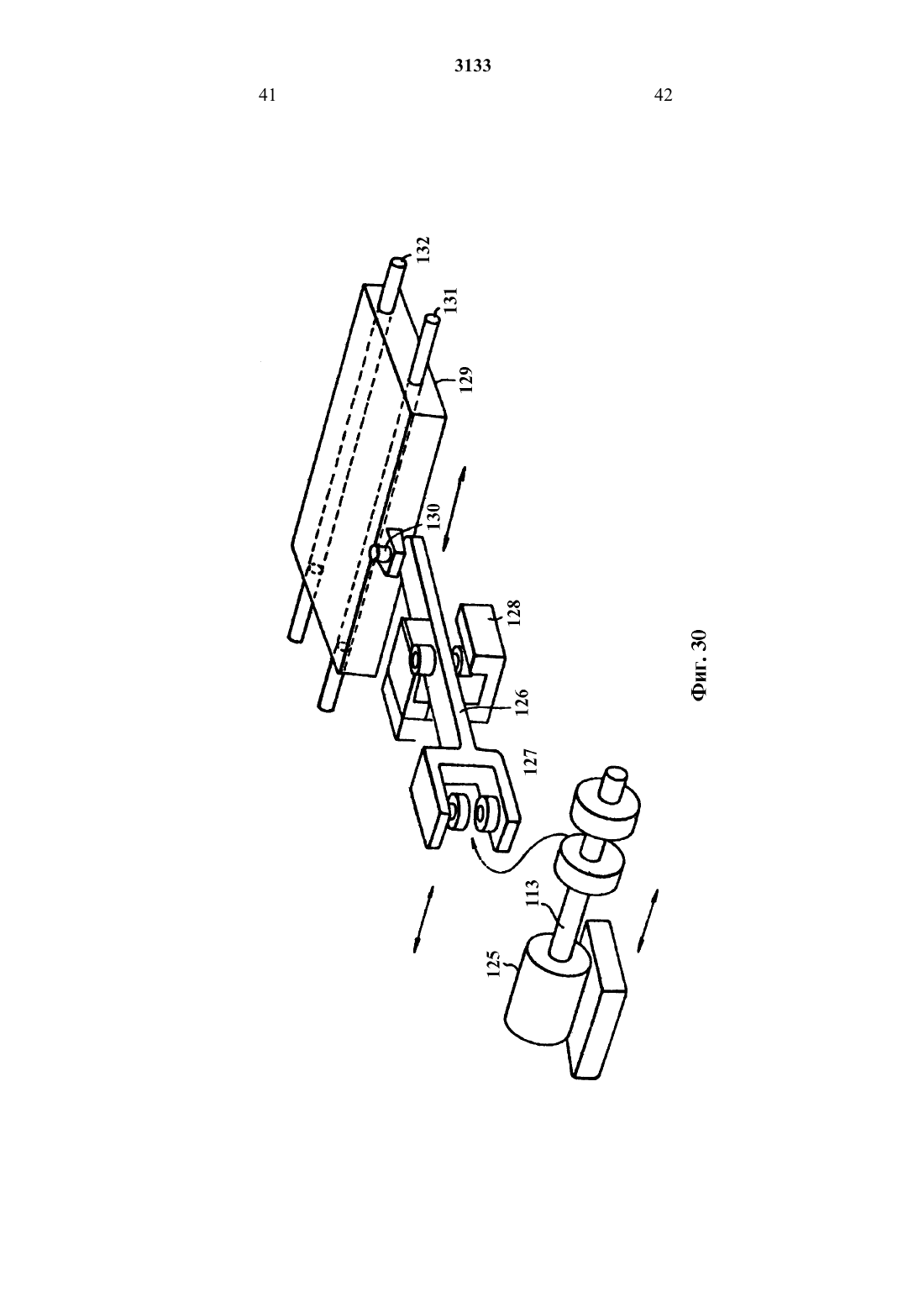
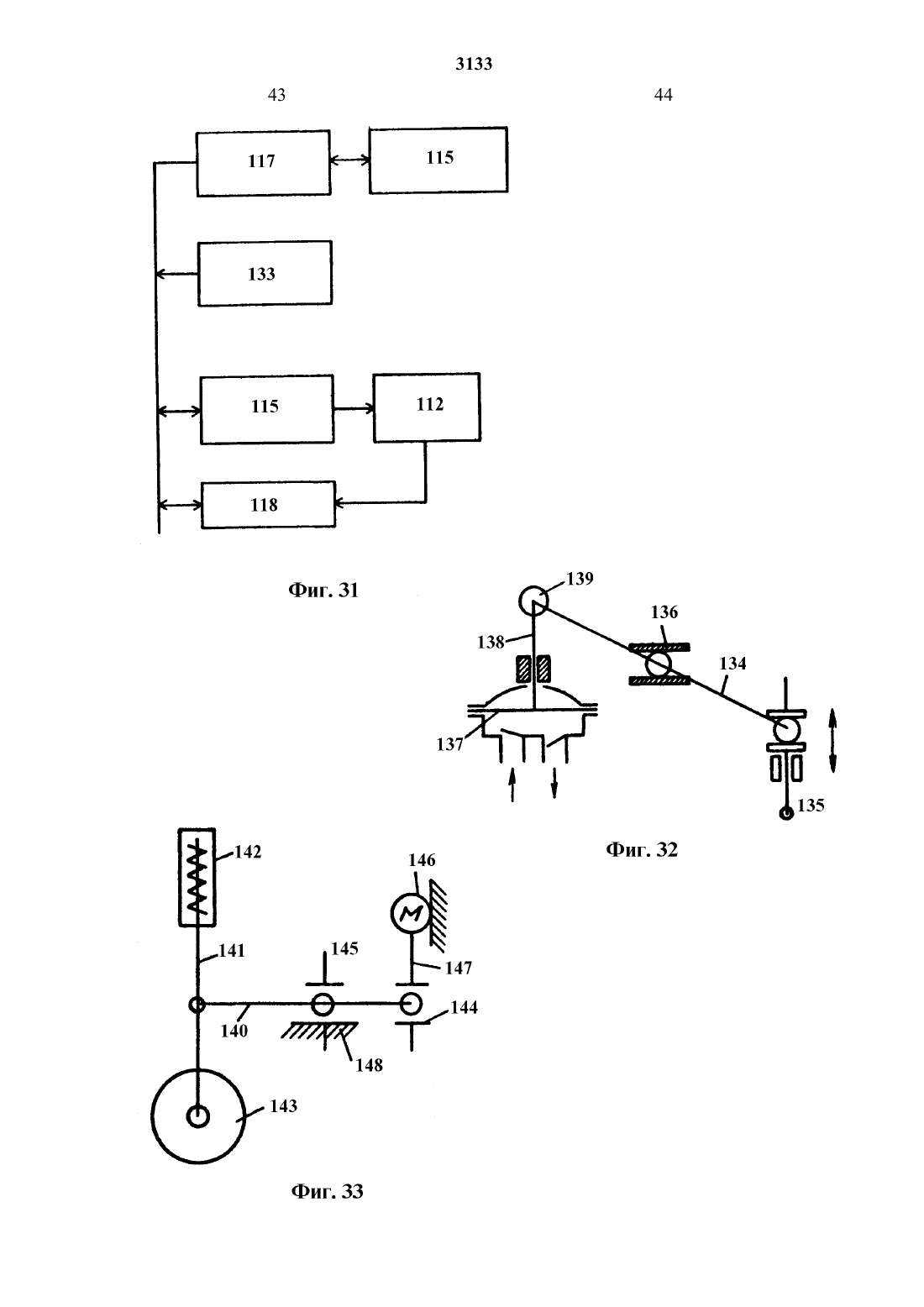
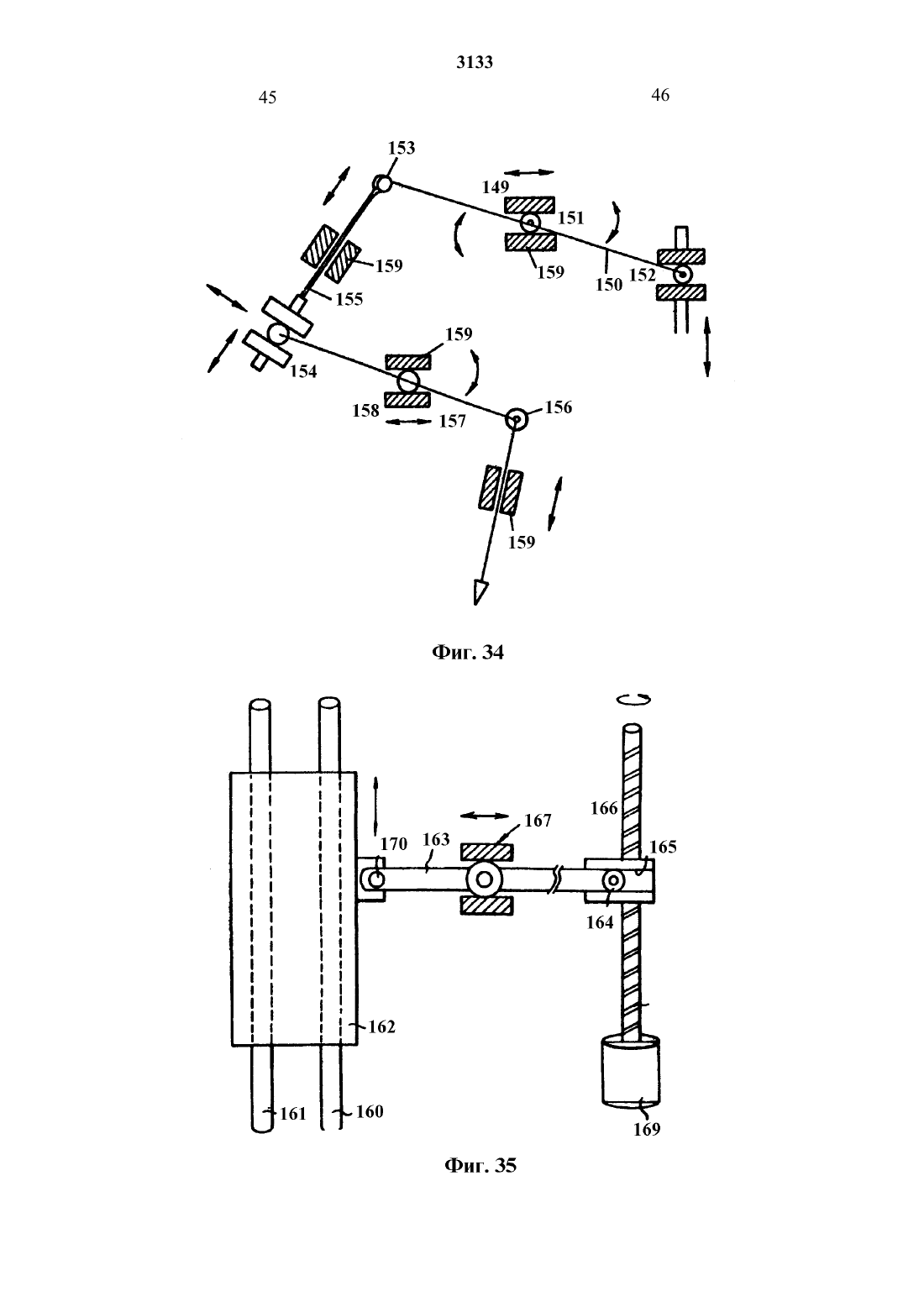
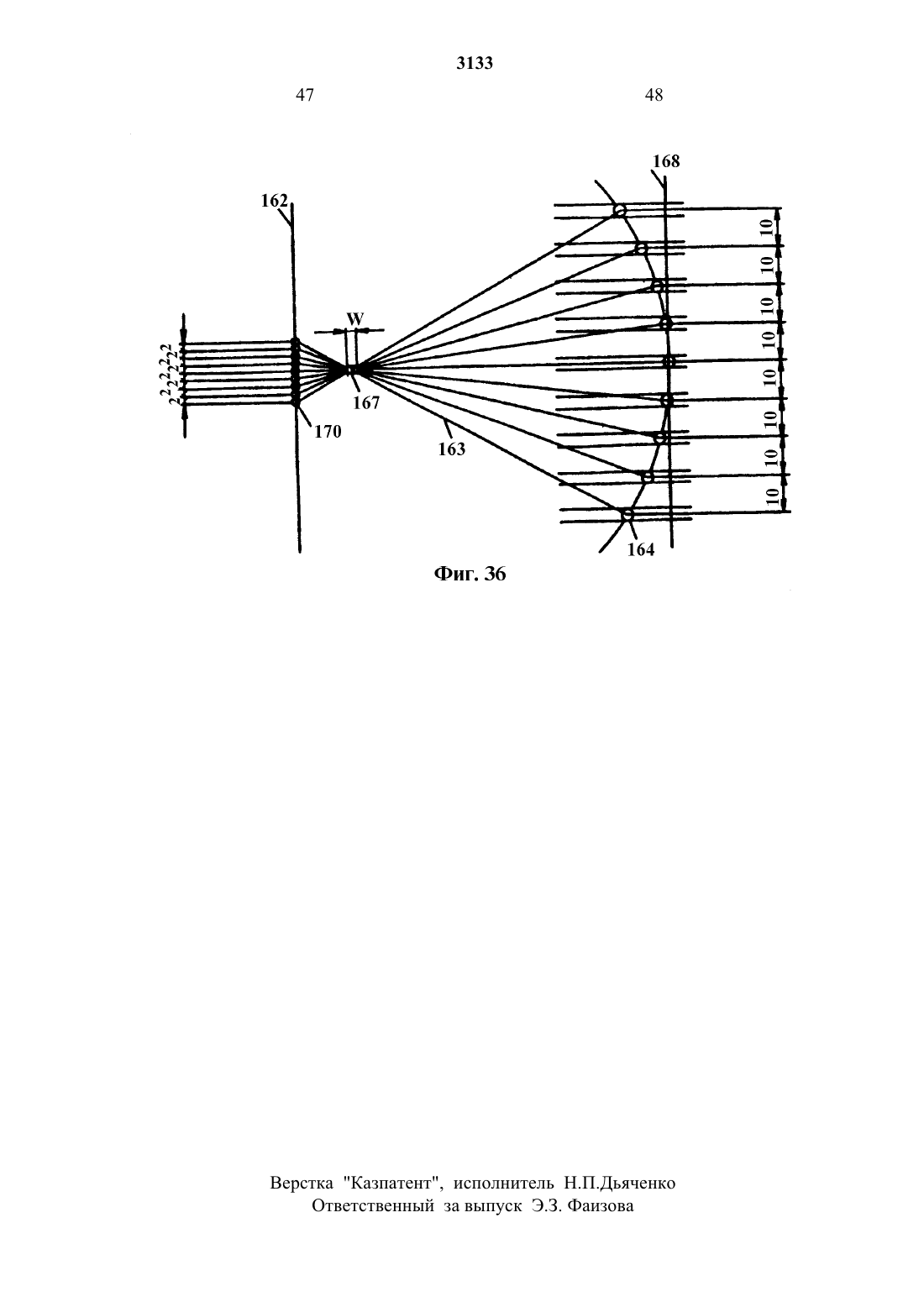
Известно рычажное устройство с подвижной опорой. содержащее смонтированный с возможностью качания в плоскости рычаг средство для взаимодействия одного элемента рычага с совершающим колебательное движение и ПрИКПЗДНВЗЮЩИМ приводящее усилие ОРГСном. средство для взаимодействия другого элемента рычага с совершающим плоскопераплельное движение и передающим рабочее усилие исполнительным органом и подвижный опорный узел качания рычага. включающий связанную с рычагом ось его качания и опору для оси качания рычага. установленную с возможностью поступательного перемещения в плоскости качания рычага и регулировки расстояния между осью качания рычага и точкой приложения рабочего усилия.Недостатками такого рычажногоо устройства являются узкий диапазон преобразуемого движения и незначительная величина передаваемого усилия.Известен пресс. содержащий станину. совершающий колебательное движение орган для приложения приводящего усилия. совершающий плоскопараллельное движение исполнительный орган и рычажное устройстео с подвижной осью для кинематической связи между упомянутыми органами. включающее качающийся в плоскости движения рычаг. средство для взвимодействия одного элемента рычага с приводящим органом. средство для взаимодействия другого элемента рычага с исполнительным органом и подвижный опорный узел качания рычага в виде связанной с рычагом оси его качания и опоры для качания рычага. установленной в направляющих с возможностью поступательного перемещения в плоскости качания рычага и регулировки расстояния между осью качания рычага и точкой приложения рабочего усилия.Недостатками такого пресса являются низкие технологические возможности. усилие прессования и возможность регулировки хода пресса.Цель достигается в рычажном устройстве и в прессе за счет того. что опора для оси качания рычага установлена с возможностью свободного перемещения. связь между осью качания рычага и рычагом выполнена с фиксацией от их взаимного поступательного перемещения в плоскости качания рычага и с обеспечениемвозможности поступательного движения рычага одновременно с его качатепьным движением при перемещении опоры в процессе работы. а по крайней мере одно из средств взаимодействия с соответствующим элементом качающегося рычага смонтировано с возможностью самоустановки точки приложения соответствующей силы вдоль плеча рычага.На фиг.14 представлены схематично конструкции различных вариантов рычажных устройств на фиг.5-10 изображены траектории движения в процессе работы рычажного устройства опоры. точки приложения силы и точки передачи рабочего усилия на фиг.1119 представлен пресс с рычажным устройством на фиг.20 и 21 представлен один пример выполнения опор на фиг.22 и 23 дРУгой пример выполнения опор на фиг.24 и 25 - третий пример выполнения опор на фиг.26 пресс. в котором используется опора. изображенная на фиг.24 на фиг.27 представлена схема электрической системы прессового устройства. изображенного на фиг.26 на фиг.28 изображен плоскошлифовальный станок. в котором используется рычажное устройство в соответствии с изобретением на фиг.29 представлена блок-схема управляющей системы плоскошлифовальные станка. изображенного на фиг.28 на фиг.З 0 представлен пример использования рычажного устройства. используемого в демпфирующем устройстве зданий на фиг.31 представлена блок-схема управляющей системы демпфирующего устройства зданий. изображенного на фиг.30 на фиг.32 схематически представлен пример использования рычажного устройства в качестве диафрагменного насоса на фиг.33 схематически представлен пример использованиярычажного устройства в автомобильном амортизаторе на фиг.34 изображена цепная система передачи усилия. составленная с присоединением к ней рычажного устройства на Фиг.35 изображен пример использования рычажного устройства в приводном механизме координатного стола на фипЗб изображена рабочая траектория главной части. изображенной на фиг.З 5.Рычажное устройство содержит рычаг 1. ось 2 качания рычага 1. опору 3 для оси 2 качания рычага. Устройство имеет средство 4 для взаимодействия рычага 1 через расположенный в точке приложения силы соединительный элемент 5 с приводящим органом и средство 6 для взаимодействия рычага 1 через расположенный в рабочей точке соединительный элемент 7 с исполнительным органом. Элемент 5 для присоеди 5нения рычага 1 к средству 4 в предпочтительном варианте состоит из элемента типа кулачкового щупа. имеющего ролик 8. который находится в контакте между двумя направляющими пластинами 9.В каждом из вариантов осуществления рычажных устройств средство 4 приводится в движение прямолинейно и вертикально. а на опоруЗ опирается и катится прямолинейно и горизонтально роликовый элемент. ось 2 качания которого установлена на рычаге 1.В каждом из вариантов осуществления рычажного устройства. изображенных на фиг.1 и 2. используется внутренняя опора. характеризуемая расположением оси 2 качания между точкой приложения приводящей силы элемента 5 и точкой приложения рабочего усилия элемента 7.В варианте. изображенном на фиг.1. средство 6 для взаимодействия с исполнительным органом может перемещаться вертикально прямолинейно по траектории. показанной на фиг.5. Иными словами. когда средство 4 для взаимодействия рычага 1 с приводящим органом движется по вертикали. рычаг качается относительно оси 2. В этот момент ось 2 перемещается горизонтально на расстояние Х по опоре 3. в результате чего средство Б для взаимодействия с исполнительным органом движется прямолинейно вертикально.В варианте. изображенном на фиг.2. средство 6 движется наклонно прямолинейно. а соединительному элементу 7. расположенному в рабочей точке рычага 1. сообщается эллиптическое движение.Траектория рабочей точки рычажного устройства. имеющего внутреннюю опору. может быть прямолинейной. как показано на фиг.5 или эллиптической. как показано на фипб или 7. Расстояние перемещения Х свободно перемещающейся опоры оси квчагния на фиг.7 меньше. чем на фиг.6.В варианте. изображенном на фиг.3. опорный элемент оси 2 и средство для приложения приводящей силы расположены на двух концах рычага 1. а средство б для приложения рабочего усилия расположено в промежуточной части рычага 1. в результате чего образуется конфигурация наружной опоры. В этом случае ход со стороны точки приложения рабочего усилия меньше хода со стороны точки приложения приводящей силы и сила увеличена.В варианте. изображенном на фиг.4. опорный элемент оси 2 и средство б для приложения рабочего усилия расположены на двух концах рычага 1. а средство 4 для приложения приводящей силы расположено в промежуточной части рычага 1. В этомслучае ход со стороны рабочей точки больше. чем со стороны точки приложения приводящей силы и сила мала.На фиг.4 траектория движения средства б прямолинейна. На фиг.В средство 4 имеет параболическую траекторию. а ось 2 имеет траекторию возвратно-поступательного движения. Траектория рабочей точки является эллиптической на фиг.9 и 10.В каждом из этих осуществлений ввиду того. что ось 2 качания движется свободно в соответствии с движением средства 4 точки приложения силы и с движением средства 6 рабочей точки при качании рычага 1, степени свободы перемещения средства 4 точки приложения силы ли средства б рабочей точки велики. Соединительный элемент 5 средства 4 точки приложения силы перемещается в оптимальное положение суммой кинетических функций средства б рабочей точки и оси 2 качания. Поэтому диапазон перемещений средства 6 рабочей точки расширяется и в то же время может эффективно передаваться движущая сила от средства 4 точки приложения силы и средства б рабочей точки через рычаг 1.Движение оси 2. движение средства 4 точки приложения силы и движение средства б рабочей точки могут представлять собой любую комбинацию вертикального прямолинейного движения. горизонтального прямолинейного движения. наклонного прямолинейного движения. вертикального кругового движения. горизонтального кругового движения. наклонного кругового движения и т.п. по мере надобности.Рычажные устройства со свободно перемещаемой опорой вышеописанных конструкций могут широко использоваться в станках. прессах, промышленном оборудовании и в качестве деталей различных АРУ гих конструкций.Рассмотрим пресс. в котором используется рычажное устройство в соответствии с изобретением. применяемый для соедине НИЯ ПРОВОДЗ И зажима ПУТЕМ ОбЖЯТИЯ.Главный корпус 10 установлен (фиг.11 и 12) на основании 11. в главном корпусе 10 расположен электродвигатель 12. В подшипнике 13 в главном корпусе 10 сидит вращающийся вал 14, на который посажена шестерня 15. воспринимающая вращающий момент с электродвигателя 12. На одном конце вращающегося вала 14 зксцентрично установлен эксцентриковый вал 16. За пределами одного конца главного корпуса 10 в направлении по вертикали установлен направляющий алемент 17. Эксцентриковый вал 16. установленный на вращающемся ва 7лу 14. вставлен с возможностью вращения в подъемный элемент 18. который может перемещаться вертикально на направляющем элементе 17. В держатель 19. установленный в подьемном элементе 18. вставлены салазки 20. Салазки могут перемещаться вертикально по направляющей 21. выполненной на подземном элементе 18. В верхнюю торцевую часть салазок 20 ввернут регулировочный винт 22. установленный в верхней торцовой части 23 подъемного злемента 18 и предназначенный для регулировки нижнего положения салазок 20. В нижней части салазок установлен вертикально перемещаемый кулачок 24. имеющий катушкообразную форму и поддерживаемый снизу гайкой 25. навернутой на резьбовую часть 26. выполненную в верхней торцовой части салазок 20. Салазки прижаты к верхней стороне кулачка 24 цилиндрической пружиной 27 сжатия. В механизме привода. имеющем описанную конструкцию. при работе электродвигателя 12 вращающийся вал 14 приводится во аращение через шестерню 15. а эксцентриковый вал 16 эксцентрично вращается относительно вращающегося вала 14. При эксцентричном вращении эксцентрикового вала 16 подъемный элемент 18 перемещается вертикально по направляющему элементу 17. Салазки 20 и кулачок 24 перемещаются вертикально совместно с подъемным элементом 18. Подъемный элемент 18 и салазки 20 работают как регулятор точки приложения силы.Около салазок 20 на основании 11 в направлении. перпендикулярном вращающемуся валу 14. расположен рычаг 28. Как показано на фиг.13 и 14. в промежуточной части рычага 28 в направлении. перпендикулярном продольному направлению рычага 28. расположена опорная ось 29. На двух концах опорной оси 29 установлены с возможностью вращения опорные ролики 30. На основании 11 в положениях. соответствующих обеим сторонам рычага 28. установлены направляющие элементы 31. В направляющие канавки 32. соответственно выполненные в направляющих элементах 31 по горизонтальному направлению. вставлены с возможностью вращения и перемещения опорные ролики 30 рычага 28. Рычаг 28 поворачивается относительно опорной оси 29 в вертикальной плоскости и может свободно перемещаться по направляющим канавкам 32 на роликах 30. В боковинах развилки 33. выполненной на одном конце рычага 28. установлены горизонтальные оси 34. На осях 34 сидят с возможностью вращения ролики 35. Развилка 33 рычага 28 охва 3133тывает с двух сторон кулачок 24 салазок 20. в результате чего ролики 35 установлены с возможностью вращения и перемещения в кулачке 24.Около рычага 28 на основании 11 расположены две головки 36 и 37. Как показано на фиг.15 и 16. головки напоминают головку гаечного ключа. Головки 36 и 37 установлены с возможностью поворота на поворотных осях 38 и 39 на общем соединительном элементе 40. расположенном в промежуточных частях головок и могут открываться и закрываться. Головки 36 и 37 имеют выступы 41 и углубления 42. в которые выступы входят. Головки 36 и 37 установлены на столе 43 на основании 1 1 так. что их ближайшие части направлены в сторону рычага 28. одна головка 37 расположена горизонтально как нижняя головка и нижняя головка 37 закреплена болтами 44. Ближайшая торцовая часть верхней головки 36 соединена с возможностью сращения с дРУгим концом рычага 28 через соединительную ось 45. Ближайшая торцовая часть нижней головки 37 соединена со столом 43 через соединительную ось 46.Верхняя головка 36 (фиг.18 и 15) открыта для размещения в ней проволоки и клеммы соединения обжатием (не показаны) в углубление 42 нижней головки 37. В этом случае эксцентриковый вал 16 в приводном механизме перемещается в верхнюю мертвую точку. перемещая салазки 20 вверх. Как показано на фиглб. вращающийся вал 14 приводится во вращение. перемещая эксцентриковый вал 16 в нижнюю мертвую точку и перемещая сазалки 28 вниз. При движении салазок вниз их движение перемещается к рычагу 28 через кулачок 24 и ролики 35. Рычаг 28 поворачивается по часовой стрелке вокруг опорной оси 29. В то же время опорный ролик 30 перемещается в направлении головки по направляющим канавкам 32 направляющих элементов 31.и. таким образом. рычаг 28 движется свободно. В этом случае благодаря комбинации кулачка 24 и роликов 35 рычаг 28 может приводиться в движение относительно салазок 20. При повороте и движении рычага 28 верхняя головка 36 поворачивается против часовой стрелки вокруг опорной оси 38. Выступ 41 сжимает провод 47 и зажим соединения обжатием (не показан). которые установлены в углубление 42 головки 37. таким образом соединяя обжатием провод 47 с зажимом соединения обжатием. соединительный элемент 40 также работает вокруг опорной оси 39.После завершения соединения обжатием вращающийся вал 14 приводится во вращение. перемещая эксцентриковый вал 16 в верхнюю мертвую точку. В этом случае операции противоположны вышеописанным.Силу соединения обжатием задают заданием положения салазок 20 при помощи регулировочного винта 22. Степень развода головок 36 и 37 задается при помощи гайки 25. как показано на фиг.18 и 19. изменяя длину А или В пружины 27.Поскольку рычаг 26 лежит на опоре 29. совершая комбинированные поворотное движение и движение перемещения. можно эффективно приводить в действие головку 36 для соединения обжатием при движении салазок 20. движение рычага 28 может поглощать ненужное движение каждой детали. т.е. мертвый ход. Движение салазок 20 может быть передано головке 36 без какихлибо потерь. и может осуществлять медленную работу. Сила салазок может. эффективно передаваться. пока осуществляются систематические операции.В данном осуществлении салазки 20 связаны с рычагом 28 при помощи комбинации кулачка 24 и роликов 35. Преимущество такой конструкции состоит в том. что можно получить большую механическую прочность. можно поглотить ненужные перемещения и можно осуществлять передачу перемещения без потерь.Изобретение не ограничивается вышеописанными примерами осуществления оно может быть изменено и модифицировано в разнообразных областях применения.В рычажном устройстве со свободно перемещающейся опорой в соответствии с изобретением рычаг лежит на подвижной опоре. и диапазон движения средства для взаимодействия элементов рычага с приводящим органом. связанного с рычагом. средства для взаимодействия элементов рычага с исполнительным органом можно значительно увеличить.В прессе рычаг, лежащий на опоре. используется для систематического и правильного выполнения операции обжатия путем сообщения головкам движения. необходимого для обжатия.В рычажном устройстве. используемом в прессе. изображенном на фиг.14. опорные ролики 30. установленные на опорной оси 29. катятся в направляющих канавках 32. тем самым образуя свободно движущуюся опору. В конструкции. изображенной на фиг.20 и 21 и не содержащей опорный ролик. рычажный элемент 48 качается на опорной оси 49. вставленной в отверстия. выполненные в ползушках 50 и Бъвставлен 3133ных в направляющие канавки 52 и 53. выполненные в направляющих элементах 54 и 55 регулятора со свободно движущейся опорой. Один конец рычажного элемента 48 связан с ползушкой 5 так же. как ось 49 опорной точки.Ползушка 56 вставлена со скольжением между направляющими элементами 57 и 58 регулятора точки приложения силы (средства для взаимодействия элементов рычага с приводящим органом). другой конец рычаж ного элемента 48 связан с элементом 69.рабочей точки через ось 60 для взаимодействия с исполнительным органом. Элемент 59 рабочей точки вставлен в направляющий элемент 61 регулятора рабочей точки. эафиксированный на основании. и отрегулирован на совершение прямолинейного движения. В этом случае наружные поверхности ползушек 50 и 56 отшлифованы с большой точностью. а внутренние поверхности направляющих канавок 52. 53. 57 и 58 отполированы. чтобы уменьшить силы трения. и не создают практических проблем. В частности. как показано на фиг.22. поскольку сила. передаваемая на ось 62. всегда передается перпендикулярно. то не возникает напряжения кручения.Однако. чтобы сделать плавными движения ползушек 50. 51 и 56. между направляющими канавками 52 и 53 и ползушками 50 и 51 можно вставить множество шарикоподшипников 63. как показано на фиг.22 и 23. Вместо шарикоподшипников могут использоваться роликоподшипники.На фиг.24 и 25 изображены конструкции со свободно подвижной опорой. На фиг.24 опорная ось 64 установлена на опорном элементе 65. а на опорной оси 64 качается рычажный элемент 56. Опорный элемент 65 посажен в несущую канавку. выполненную на подушке 67. фиксированной на основании 68. Опорный элемент 65 может двигаться на шарикоподшипниках 69. вставленных между опорным элементом 65 и несущей канавкой в направлении, указанном стрелкой. Один конец рычажного элемента 66 соединен с ведущим валом 70 через соединительный элемент типа кулач л кового повторителя. имеющий ролик 71.вставленный между направляющими пластинами 72 регулятора точки приложения силы. другой конец рычажного элемента 66 соединен с кулисным штоком 73. опирающимся на регулятор 74 рабочей точки через ось 75. В подвижной опоре. выполненной в соответствии с вышеописанным. опорная ось 64 не движется. а опорный элемент 65 свободно перемещается в подшипниках 69.
МПК / Метки
МПК: B30B 1/06, F16H 21/00
Метки: пресс, опорой, рычажное, устройство, подвижной
Код ссылки
<a href="https://kz.patents.su/24-3133-rychazhnoe-ustrojjstvo-s-podvizhnojj-oporojj-i-press.html" rel="bookmark" title="База патентов Казахстана">Рычажное устройство с подвижной опорой и пресс</a>
Горизонтальный пресс для прессования в кипы волокнистого материала
Номер патента: 1501
Опубликовано: 15.12.1994
Автор: Джумагалиев Адий Ибрашевич
МПК: B30B 9/30
Метки: горизонтальный, пресс, материала, прессования, волокнистого, кипы
Формула / Реферат:
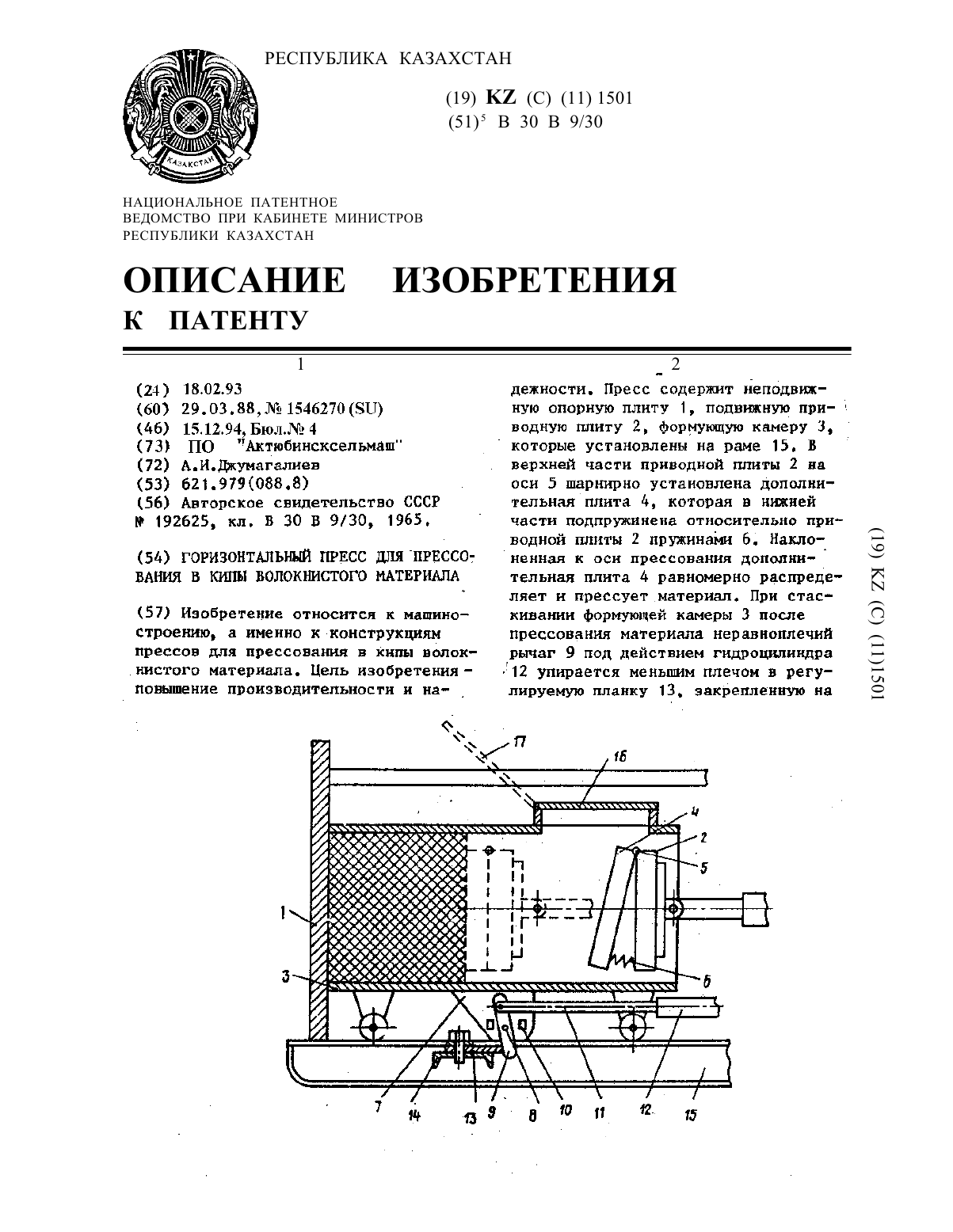
Изобретение относится к машиностроению, а именно к конструкциям прессов для прессования в кипы волокнистого материала. Цель изобретения-повышение производительности и надежности. Пресс содержит неподвижную опорную плиту 1, подвижную приводную плиту 2, формующую камеру 3, которые установлены на раме 15. В верхней части приводной плиты 2 на оси 5 шарнирно установлена дополнительная плита 4, которая в нижней части подпружинена относительно...
Устройство для чистки обуви
Номер патента: 35
Опубликовано: 10.12.1993
Автор: Пукач Борис Григорьевич
МПК: A47L 23/02
Метки: устройство, чистки, обуви
Формула / Реферат:
Изобретение относится к устройствам, предназначенным для чистки обуви и может быть использовано в сфере бытового обслуживания. Известно устройство для чистки обуви, содержащее размещенные на станине подставку для обуви, вертикальные приводные щетки, смонтированные на каретках с боковых сторон подставки, рычаги, установленные с возможностью качания в противофазе и имеющие направляющие для кареток, и привод (1). Данное устройство не обеспечивает...
Летучий обжимной пресс
Номер патента: 2404
Опубликовано: 15.09.1995
Автор: Вольфганг Роде
Метки: летучий, обжимной, пресс
Формула / Реферат:
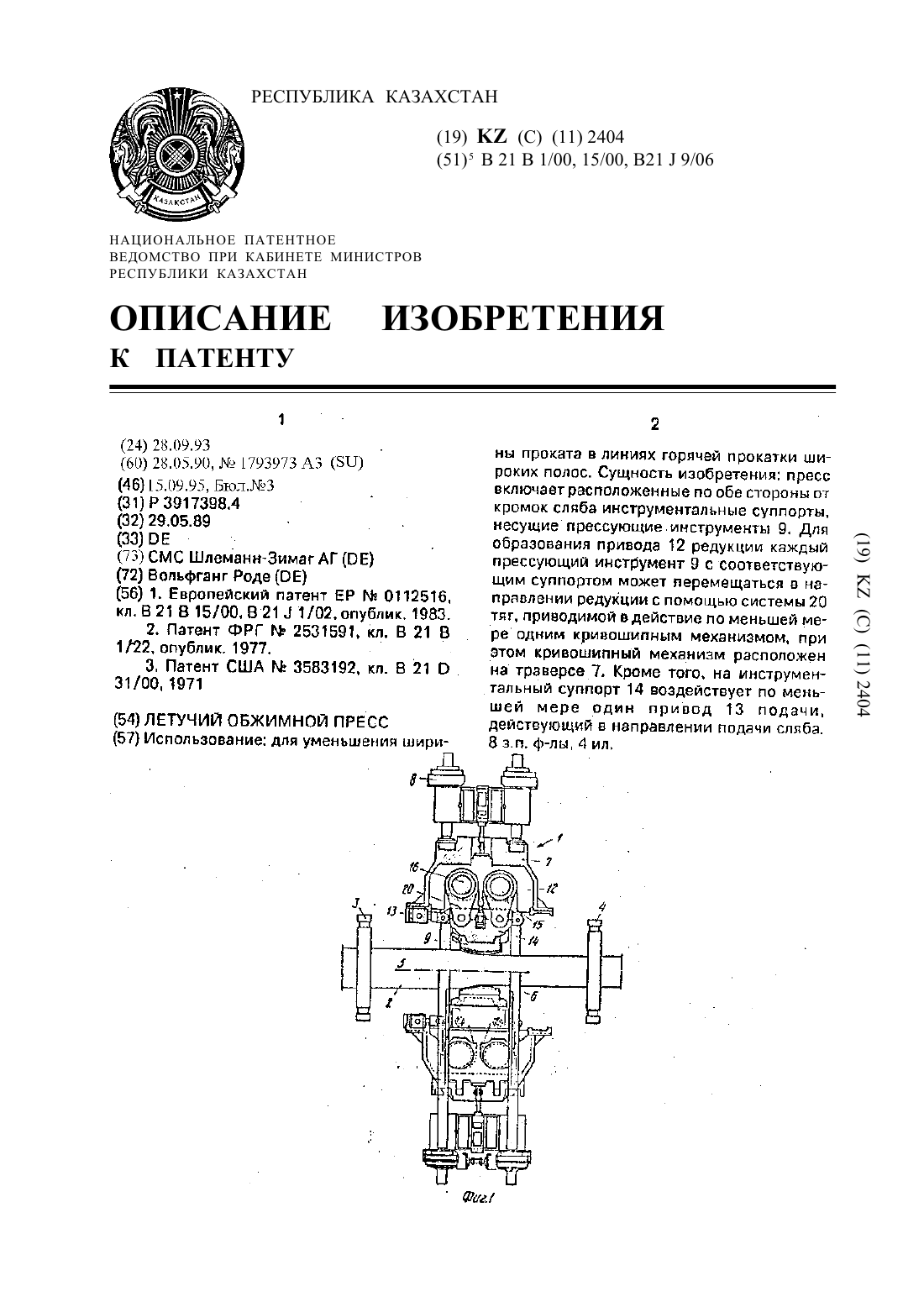
Использование: для уменьшения ширины проката в линиях горячей прокатки широких полос. Сущность изобретения: пресс включает расположенные по обе стороны от кромок сляба инструментальные суппорты, несущие прессующие инструменты 9. Для образования привода 12 редукции каждый прессующий инструмент 9 с соответствующим суппортом может перемещаться в направлении редукции с помощью системы 20 тяг, приводимой в действие по меньшей мере одним кривошипным...
Устройство Шайдулова-Боравлева для кантовки полых рулонов
Номер патента: 42
Опубликовано: 10.12.1993
Авторы: Боравлев Петр Викторович, Шайдулов Равиль Фаритович
МПК: B21C 47/20
Метки: кантовки, полых, рулонов, шайдулова-боравлева, устройство
Формула / Реферат:
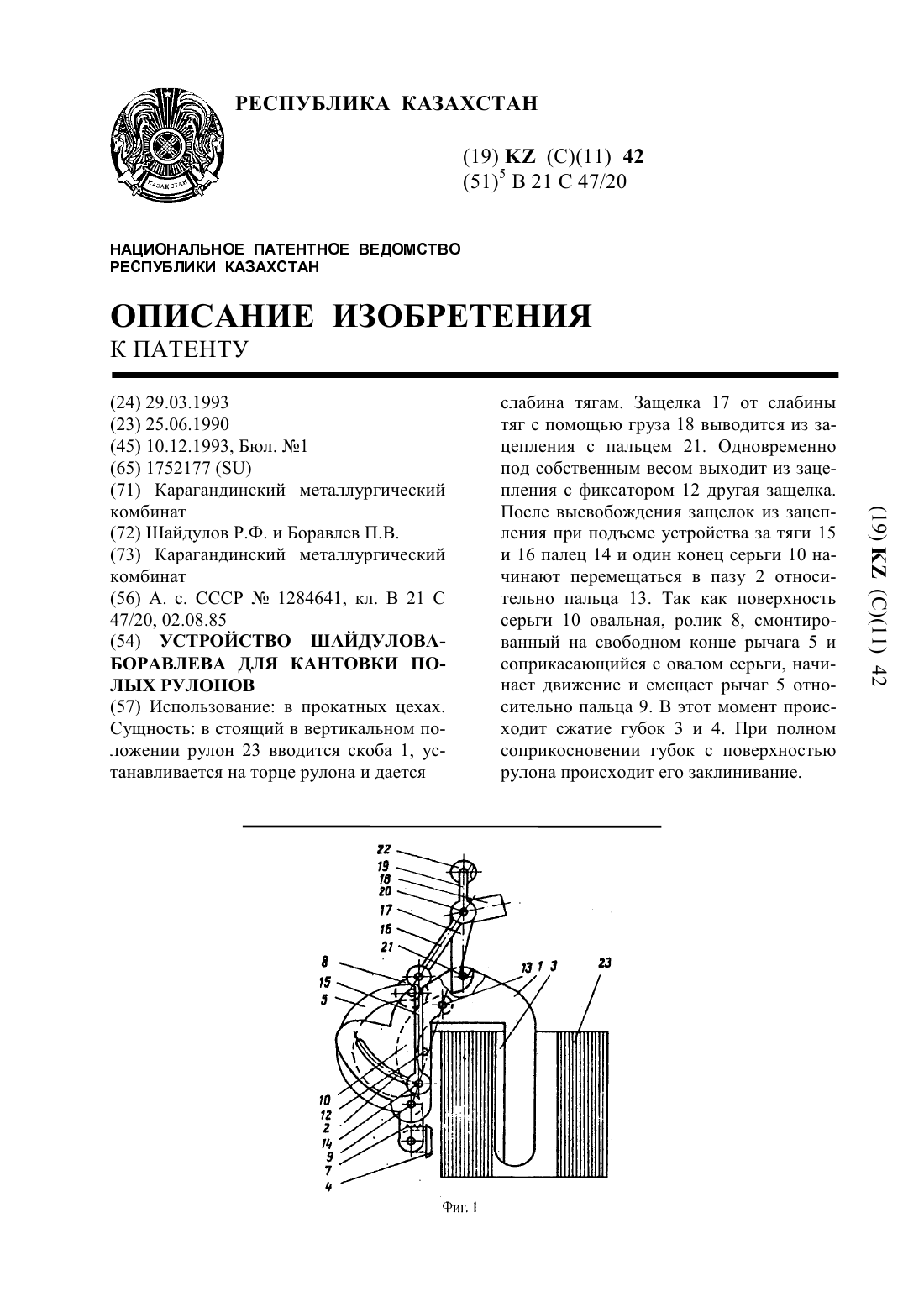
Использование: в прокатных цехах. Сущность: в стоящий в вертикальном положении рулон 23 вводится скоба 1, устанавливается на торце рулона и дается слабина тягам. Защелка 17 от слабины тяг с помощью груза 18 выводится из зацепления с пальцем 21. Одновременно под собственным весом выходит из зацепления с фиксатором 12 другая защелка. После высвобождения защелок из зацепления при подъеме устройства за тяги 15 и 16 палец 14 и один конец серьги 10...
Устройство для отделения катодных осадков
Номер патента: 581
Опубликовано: 15.03.1994
Авторы: Насретдинов Эдуард Константинович, Апарин Олег Николаевич, Белоусов Владимир Николаевич, Пустовит Евгений Петрович, Сластников Владимир Николаевич, Дмитриев Сергей Ильич, Багаев Иван Сергеевич, Мельграф Густав Яковлевич
МПК: C25C 7/08
Метки: катодных, устройство, отделения, осадков
Формула / Реферат:
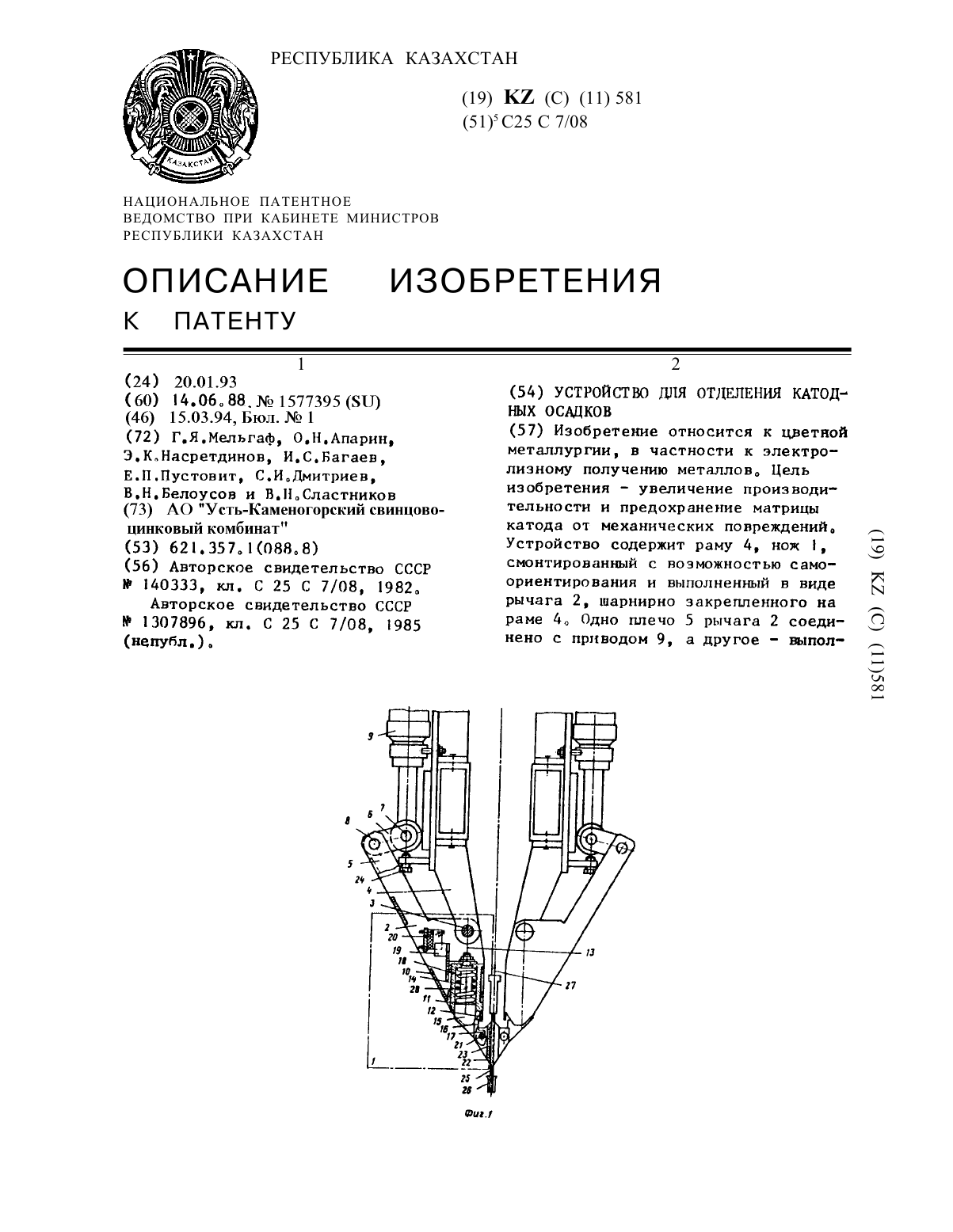
Изобретение относится к цветной металлургии, в частности к электролизному получению металлов. Цель изобретения - увеличение производительности и предохранение матрицы катода от механических повреждений. Устройство содержит раму 4, нож 1, смонтированный с возможностью самоориентирования и выполненный в виде рычага 2, шарнирно закрепленного на раме 4. Одно плечо 5 рычага 2 соединено с приводом 9, а другое - выполнено с вертикальной втулкой 11, в...
Предыдущий патент: Устройство для вдувания подогретого воздуха в шахтную печь и способ изготовления цилиндрических деталей устройства для вдувания подогретого воздуха в шахтную печь
Следующий патент: Устройство для определения физических свойств жидкостей и газов
Случайный патент: Способ производства зефира