Хирургический аппарат для наложения швов с функцией сшивания
Текст
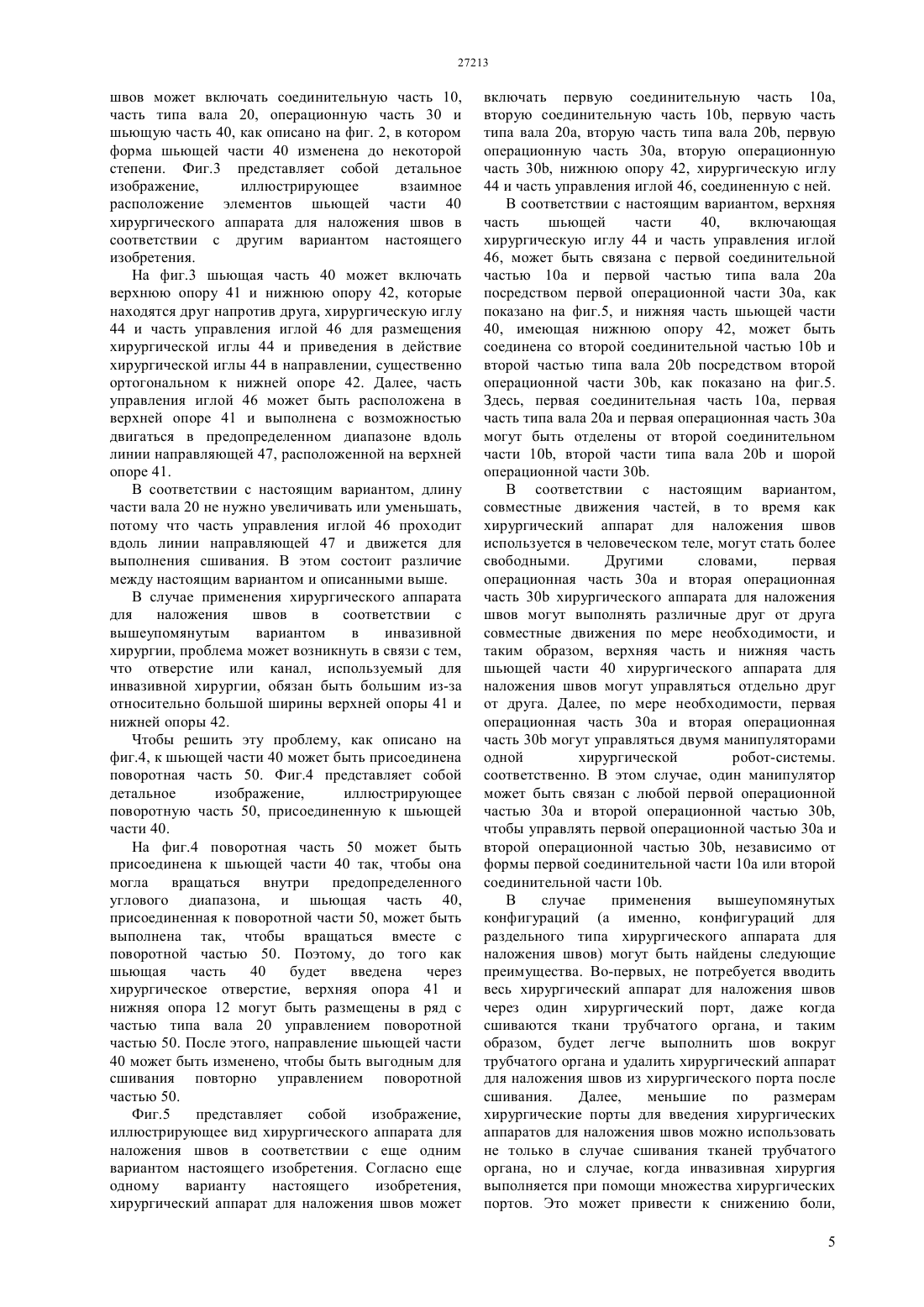
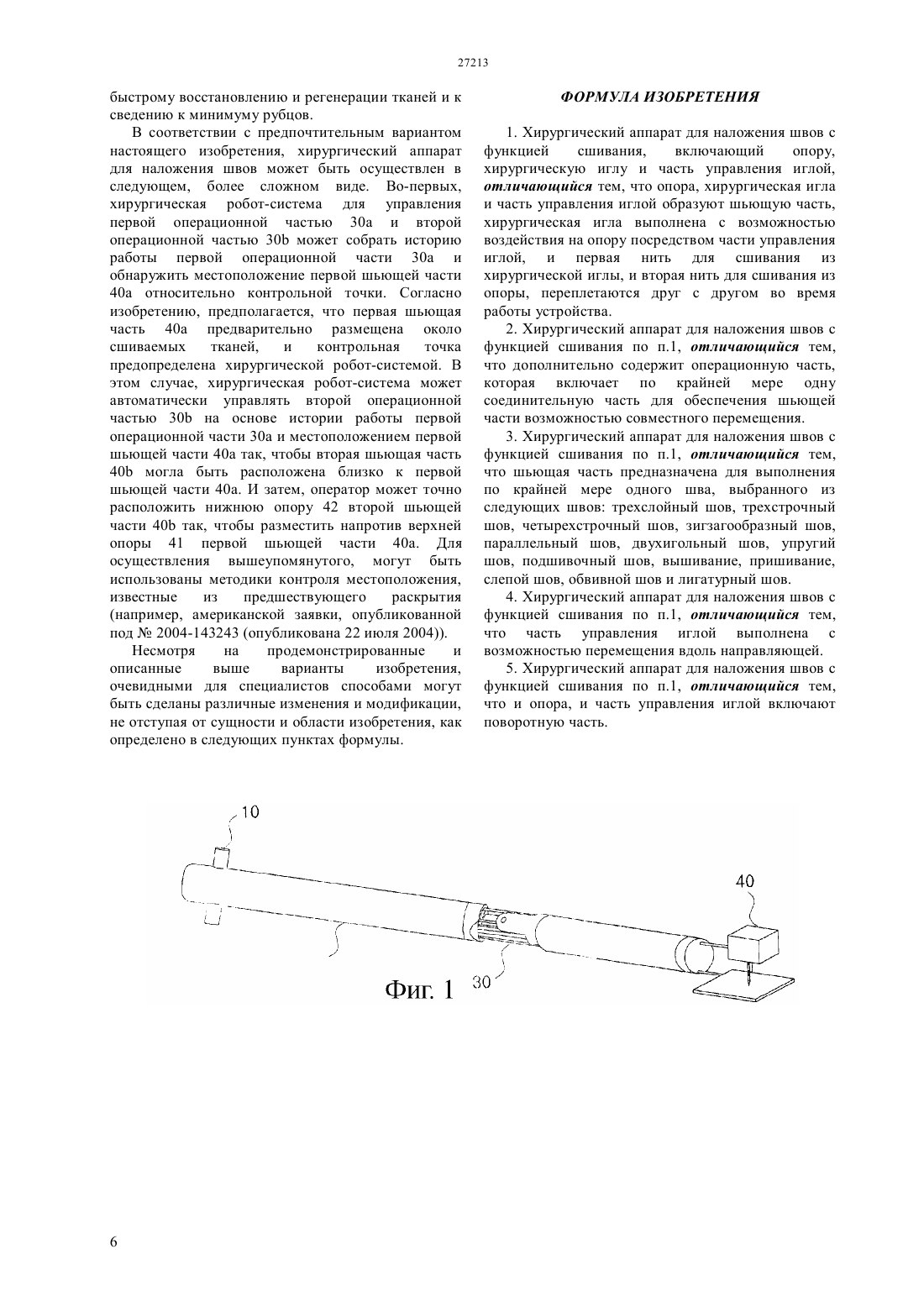
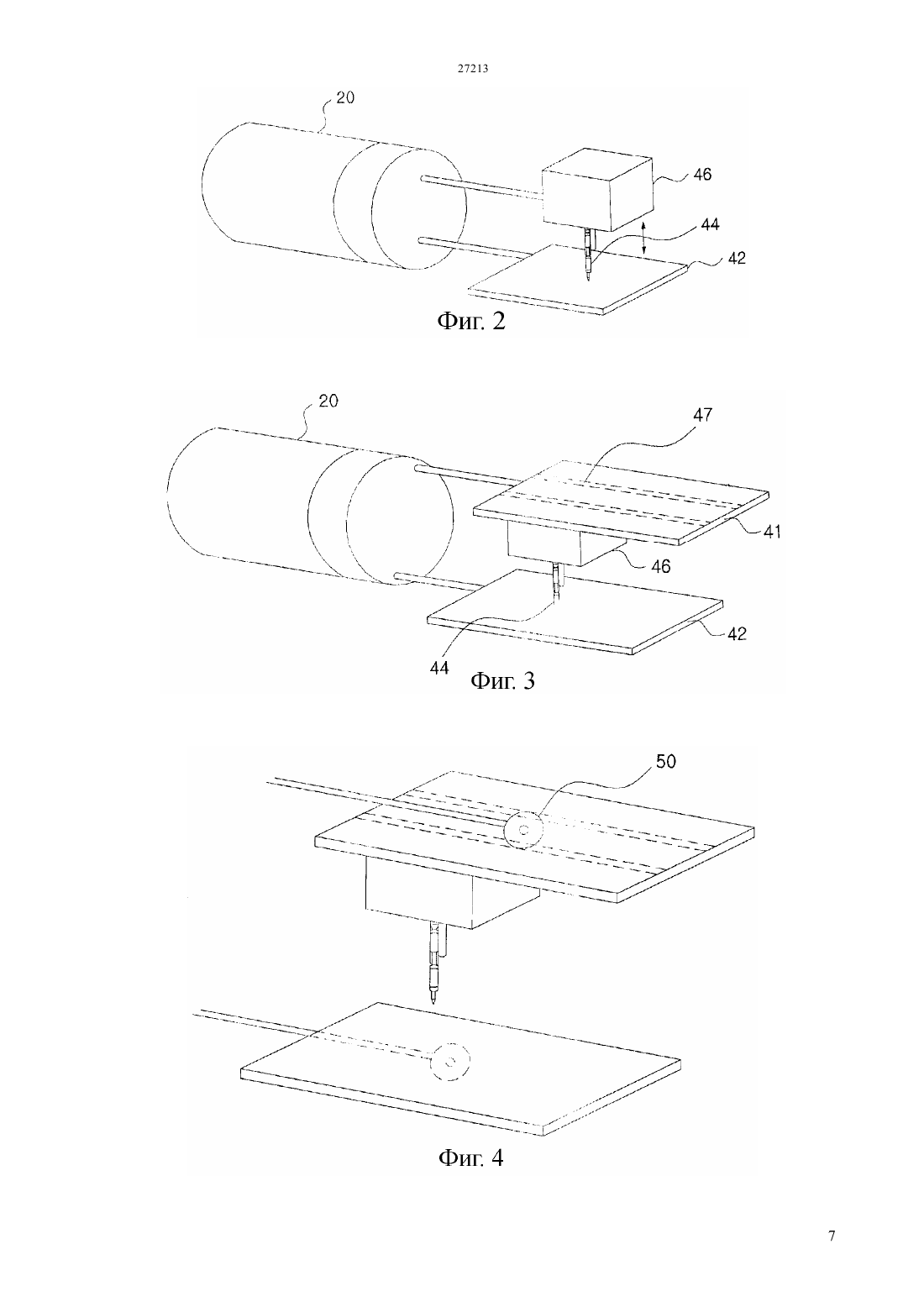
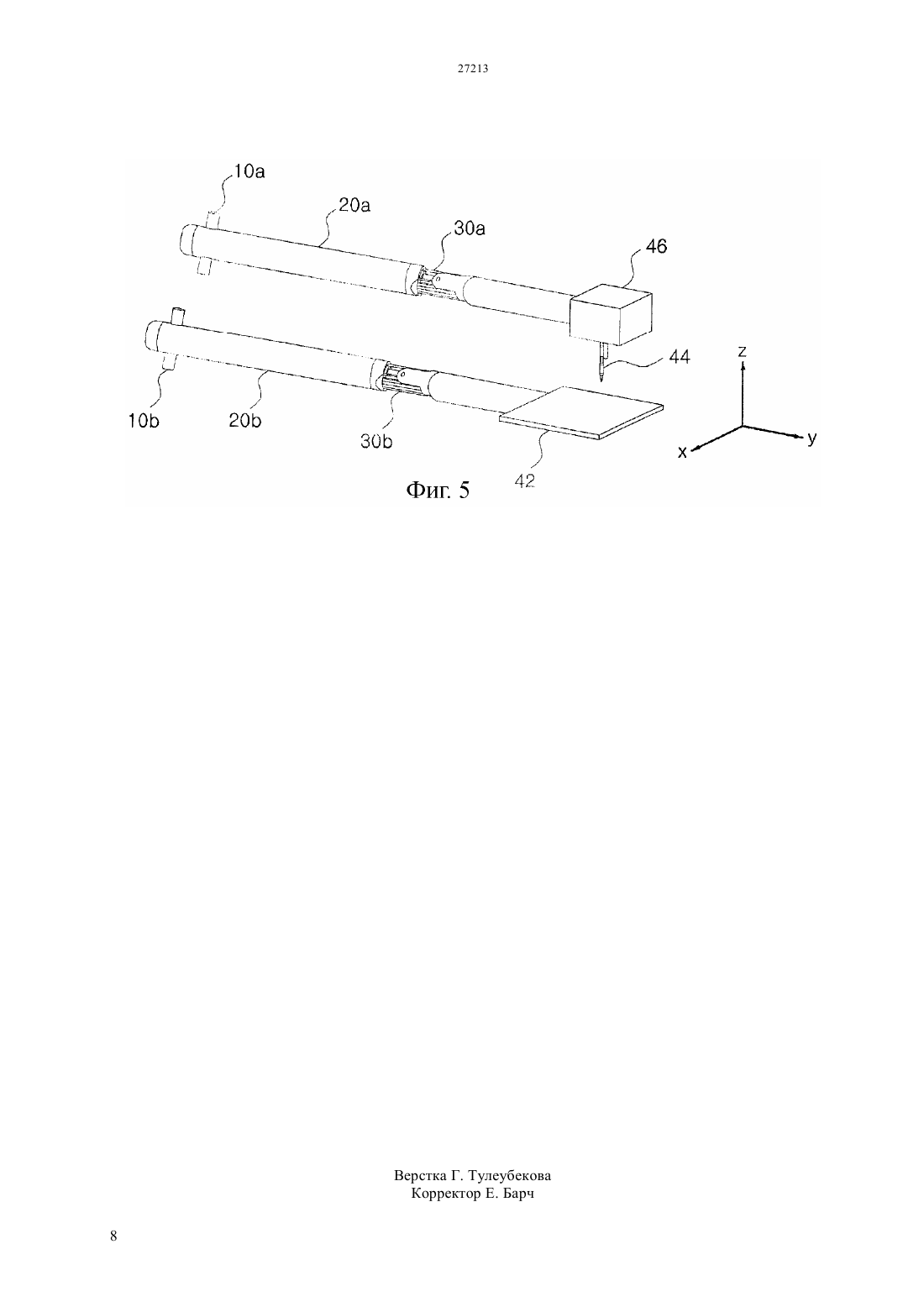
(51) 61 17/072 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(54) ХИРУРГИЧЕСКИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ ШВОВ С ФУНКЦИЕЙ СШИВАНИЯ(57) Настоящее изобретение относится к хирургическим аппаратам для наложения швов,имеющим функцию сшивания. В соответствии с одним аспектом настоящего изобретения, создан хирургический аппарат для наложения швов,включающий соединительную часть, часть типа вала, связанную с соединительной частью,операционную часть и шьющую часть, связанную с частью типа вала посредством операционной части,при этом шьющая часть включает опору,хирургическую иглу и часть управления иглой, в котором хирургическая игла перемещается в направлении, существенно ортогональном к опоре,частью управления иглой, и нить для сшивания из хирургической иглы и нить для сшивания из опоры переплетаются друг с другом во время работы аппарата.(74) Тагбергенова Модангуль Маруповна Тагбергенова Алма Таишевна Касабекова Найля Ертисовна Настоящее изобретение относится к хирургическим аппаратам для наложения швов с функцией сшивания. В частности, настоящее изобретение относится к хирургическим аппаратам для наложения швов,которым оператор, такой как хирург, может зашить ткани человеческого тела аккуратно, быстро и легко. Уровень техники изобретения Важной частью хирургических действий является сшивание различных слоев ткани человеческого тела, таких как серозные оболочки,мышцы, фасции и кожа. Главным в процессе наложения швов является сведение к минимуму времени наложения шва, усталости оператора,времени анестезии и потери крови, что создает благоприятные условия для регенерации тканей в послеоперационный период. Кроме того, с косметической целью может быть необходимым уменьшение рубцов, возникающих в результате хирургических действий. Техническая задача Обычный процесс наложения швов выполняется,как правило, способом, при котором оператор вручную соединяет ткани человека путем наложения швов с помощью хирургических игл и нитей. Однако, при обычном процессе наложения швов,основанном на работе оператора вручную, время проведения хирургической операции час то увеличивается в зависимости от навыков и опыта оператора в наложении швов. Наложение швов ручным способом может привести к значительной усталости оператора, удлинению времени анестезии или затруднению управления кровью. Кроме того, несмотря на то, что качество рубцов,образующихся после наложения шва, зависит от того насколько равномерно и плотно выполнены стежки, однородность и плотность стежков не могут быть гарантированы обычными ручными способами наложения швов. Технические задачи изобретения Цель настоящего изобретения заключается в решении вышеупомянутых проблем. Задачей настоящего изобретения является создание хирургического аппарата для наложения швов, позволяющего оператору выполнить шов аккуратно и легко. Другой задачей настоящего изобретения является создание хирургического аппарата для наложения швов с целью снижение времени,потраченного на шов. Следующей задачей настоящего изобретения является создание хирургического аппарата для наложения швов для минимизирования рубцов,образующихся при сшивании тканей. Еще одной задачей настоящего изобретения является создание хирургического аппарата для наложения швов, соединенного с внешним аппаратом для наложения швов, таким как хирургическая робот-система с манипулятором, для того, чтобы оператор мог выполнить механический шов. Технические результаты изобретения 2 В соответствии с настоящим изобретением,оператор может выполнить шов аккуратно и легко. В соответствии с настоящим изобретением,может быть сокращено до минимума время,потраченное на шов. В соответствии с настоящим изобретением,могут быть минимизированы рубцы, образующиеся в результате наложения швов. В соответствии с настоящим изобретением,создан хирургический аппарат для наложения швов,соединенный с внешним аппаратом для наложения швов, таким как хирургическая робот-система, для возможности выполнения оператором механических швов. Описание чертежей Вышеупомянутые объекты и признаки настоящего изобретения станут очевидными из следующего ниже описания предпочтительных вариантов,приведенных со ссылками на приложенные чертежи, на которых Фиг.1 является изображением, иллюстрирующим общий вид хирургического аппарата для наложения швов в соответствии с одним вариантом настоящего изобретения. Фиг.2 является детальным изображением,иллюстрирующим взаиморасположение элементов шьющей части 40 хирургического аппарата для наложения швов в соответствии с еще одним вариан том настоящего изобретения. Фиг.3 является детальным изображением,иллюстрирующим взаиморасположение элементов шьющей части 40 хирургического аппарата для наложения швов в соответствии с другим вариантом настоящего изобретения. Фиг.4 является детальным изображением,иллюстрирующим поворотную часть 50,присоединенную к шьющей части 40. Фиг.5 является изображением, иллюстрирующим вид хирургического аппарата для наложения швов в соответствии с еще одним вариантом настоящего изобретения. Предпочтительный вариант изобретения Далее представлены несколько характерных пространственных расположений элементов для создания вышеупомянутых объектов настоящего изобретения. В соответствии с одним аспектом настоящего изобретения создан хирургический аппарат для наложения швов, включающий соединительную часть, часть типа вала, связанную с соединительной частью, операционную часть и шьющую часть,связанную с частью типа вала посредством операционной части, при этом шьющая часть включает опору, хирургическую иглу и часть управления иглой, в котором хирургическая игла перемещается в направлении,существенно ортогональном (перпендикулярном) к опоре, частью управления иглой, и пить, заправленная в хирургическую иглу, и нить, подаваемая из опоры,переплетаются друг с другом во время работы устройства. В соответствии с другим аспектом настоящего изобретения, создан хирургический аппарат для наложения швов,включающий первую соединительную часть и вторую соединительную часть, первую часть типа вала, связанную с первой соединительной частью, и вторую часть типа вала,связанную со второй соединительной частью,первую операционную часть и вторую операционную часть, и первую шьющую часть,связанную с первой частью типа вала посредством первой операционной части, и вторую шьющую часть, связанную со второй частью типа вала посредством второй операционной части, в котором первая шьющая часть включает хирургическую иглу и часть управления иглой, и вторая шьющая часть включает опору, и в котором хирургическая игла перемещается в направлении,существенно ортогональном к опоре, частью управленья иглой, и нить, заправленная в хирургическую иглу, и нить,подаваемая из опоры, переплетаются друг с другом во время работы устройства. Выполнение способа согласно изобретению Следующее подробное описание приведено со ссылками на приложенные чертежи, которые показывают посредством изображений определенные варианты, которые могут быть выполнены на практике в соответствии с настоящим изобретением. Эти варианты описаны достаточно подробно, чтобы позволить специалисту применить на практике настоящее изобретение. Следует иметь в виду, что различные варианты настоящего изобретения, несмотря на их различие, не являются взаимоисключающими. Например, характерный признак, структура или характеристика, описанные в отношении одного варианта, могут быть осуществлены в других вариантах, не отступая от сущности,объема и области настоящего изобретении. Кроме того, подразумевается, что размещение или установка отдельных элементов в каждом раскрытом варианте могут быть изменены,не отступая от сущности, объема и области настоящего изобретения. Поэтому, следующее подробное описание не должно рассматриваться в ограничивающем смысле, и объем настоящего изобретения определен только в соответствии с приложенными,соответственно интерпретируемыми пунктами формулы изобретения, наряду с полным диапазоном приведенных в них эквивалентов. На чертежах одинаковыми цифрами обозначены одинаковые или функционально подобные элементы для нескольких изображений. Настоящее изобретение далее описано более подробно со ссылками на приложенные чертежи. Фиг.1 представляет собой изображение,иллюстрирующее общий вид хирургического аппарата для наложения швов в соответствии с одним вариантом настоящего изобретения. Как показано на фиг.1, хирургический аппарат для наложения швов в соответствии с одним вариантом настоящего изобретения может включать соединительную часть 10, часть типа вала 20,операционную часть 30 и шьющую часть 40. В соответствии с одним вариантом настоящего изобретения, соединительная часть 10 позволяет связать хирургический аппарат для наложения швов с внешним аппаратом для наложения швов, таким как хирургическая робот-система с манипулятором. Присоединение хирургического аппарата для наложения швов к хирургической робот- системе или манипулятору может быть выполнено в соответствии с описанным в корейском патенте,опубликованном под 2005-100147 (опубликован 18 октября 2005), и корейском патенте,опубликованном под 2008-89579 (опубликован 7 октября 2008). Содержание вышеупомянутых двух публикаций включено в настоящее описание в их полном объеме. В соответствии с одним вариантом настоящего изобретения, часть типа вала 20 может включать вал, один конец которого связан с соединительной частью 10, а другой конец - с операционной частью 30. Внутрь части вала 20 могут быть включены части управления, такие как привод для управления операционной частью 30 и/или шьющей частью 40. Кроме того, вал может физически поддерживать хирургический аппарат для наложения швов в соответствии с настоящим изобретением. В соответствии с одним вариантом настоящего изобретения, операционная часть 30 может соединять шьющую часть 40 с частью типа вала 2 и и отрегулировать положение и угол шьющей части 40 относительно части вала 20 в ответ на предопределенный управляющий сигнал от внешнего аппарата. Операционная часть 30 может включать более двух частей, соединенных для выполнения пошаговых действий и/или отклонения от направления действия по мере необходимости. Для формирования операционной части 30 может дополнительно быть использован любой известный принцип конструирования объединенной части хирургического аппарата для наложения швов. Далее подробно описана шьющая часть 40 в соответствии с несколькими вариантами настоящего изобретения. Фиг.2 представляет собой детальное изображение, иллюстрирующее взаиморасположение элементов шьющей части 40 хирургического аппарата для наложения швов в соответствии с одним вариантом настоящего изобретения. На фиг.2 шьющая часть 40 является элементом для сшивания или пришивания человеческих тканей и, в частности, может иметь нижнюю опору 42,хирургическую иглу 44 и часть управления иглой 46 для размещения хирургической иглы 44 и приведения в действие хирургической иглы 44 в направлении, существенно ортогональном к нижней опоре 42. Далее, в качестве примера, указывается,что опора шьющей части 40 в соответствии с настоящим изобретением является нижней, но следует иметь в виду, что опора, находящаяся напротив хирургической иглы 44, может быть помещена в верхнее положение хирургической иглы 44 по мере необходимости. В соответствии с одним вариантом настоящего изобретения, шьющая часть 40 может сшить человеческие ткани тем же или подобным способом,которым производит сшивание любая известная швейная машина, используемая для тканей(материй) на протяжении вот уже многих лет. 3 Другими словами, человеческие ткани могут быть сшиты переплетением или сцеплением нитей,заправленных в хирургическую иглу 44, с нитью,подаваемой из нижней опоры 42, при движении хирургической иглы 44 вверх-вниз. В этом случае предпочтительно важно, что нити, заправленные в хирургическую иглу 44 и подаваемые нижней опорой 42, переплетаются, но не завязываются друг с другом. Далее, нить для сшивания, используемая в хирургическом аппарате для наложения швов, в соответствии с настоящим изобретением, может в основном подаваться шьющей частью 40. Эта нить для сшивания может предпочтительно быть одноразовой для предотвращения перекрестного инфицирования. Аналогично, хирургическая игла 44, используемая в хирургическом аппарате для наложения швов в соответствии с настоящим изобретением, может предпочтительно быть одноразовым модулем иглы. В соответствии с одним вариантом настоящего изобретения, шьющая часть 40 может привести в действие часть управления иглой 46 на основе управляющего сигнала, поступившего из внешнего аппарата, такого как хирургическая робот-система. Например, хирургическая игла 44 шьющей части 40 может двигаться в направлении, существенно ортогональном к нижней опоре 42, в ответ на действия оператора на внешнем аппарате. В этом случае, оператор может использовать различные опции. Например, оператор может выбрать одну из следующих опций для продвижения хирургической иглы 44 (или шьющей части 40), которые отражают несколько основных функций известной швейной машины и особенно выгодны в выполнении хирургическою действия 1. трехслойный шов сшивание трех слоев ткани,не только двух слоев ткани 2. трехстрочный шов сшивание тремя нитями,заправленными в хирургическую иглу 44 3. четырехстрочный шов сшивание четырьмя нитями, заправленными в хирургическую иглу 44 4. зигзагообразный шов сшивание шьющей частью 40, направляемой для движения зигзагом 5. параллельный шов сшивание двух слоев ткани, края которых контактируют друг другом 6. двухигольный шов сшивание двумя хирургическими иглами 44 7. упругий шов сшивание эластичной нитью 8. подшивочный шов сшивание способом, при котором нить проходит по кругу в форме пружины 9. вышивание вышивание чего-нибудь(например, хирургической даты или маркировки) на ткани 10. пришивание накладывание шва на объект(например, искусственный орган) и ткань так, чтобы объект был присоединен к ткани 11. слепой шов сшивание способом, при котором нить не видна снаружи ткани 12. обвивной шов сшивание по краю одной или двух тканей для загибания краев, подрубания,обметывания или загибания кромок 13. лигатурный шов сшивание до перевязки кровеносного сосуда 4 Далее, в соответствии с одним вариантом настоящего изобретения,оператор может контролировать процесс сшивания в шьющей части 40. Например, шьющая часть 40 может перемещаться, в то время как оператор управляет процессом сшивания,выбирая один из автоматических способов и полуавтоматических способов при помощи внешнего аппарата. При автоматическом способе шьющая часть 40 продолжает выполнять шов в выбранном направлении до тех пор, пока оператор не остановит процесс сшивания. При полуавтоматическом способе шьющая часть 40 может остановить сшивание после окончания определенного количества стежков, даже если оператор не прерывает процесс сшивания. В соответствии с одним вариантом настоящего изобретения, промежуток между двумя стежками и скорость сшивания, которые являются главными факторами для различных видов швов, могут быть установлены оператором, как описано выше. Предпочтительно, промежуток между стежками и/или скорость сшивания могут быть выбраны квалифицированным оператором согласно каждому сшиваемому виду тканей (например, ткани кровеносных органов, ткани дыхательных органов или ткани кожи). Далее, промежуток между стежками и/или скорость сшивания могут быть установлены путем выбора оператором одного из нескольких предопределенных способов сшивания на основе вида сшиваемых тканей. Далее, в случае,когда длина сшиваемых тканей является слишком длинной,аппарат может иметь такую конфигурацию, при которой длина части типа вала может быть увеличена или уменьшена при перемещении шьющей части 40. Хирургический аппарат для наложения швов в соответствии с настоящим изобретением может без ограничения быть применен к любому виду хирургии (например, лапаротомии). Таким образом,он может быть применен в инвазивной хирургии,такой как лапароскопическая хирургия и эндоскопическая хирургия. В этом случае,хирургический аппарат для наложения швов может быть конфигурирован иначе, чем это показано на фиг.1 или фиг.2. Например, часть типа вала 20 может быть сформирована так, чтобы быть подходящей (например, более тонкой и более длинной) для инвазивной хирургии, операционная часть 30 может иметь множество объединенных частей, или шьющая часть 40 может быть уменьшена до минимума. После одной из вышеупомянутых модификаций хирургический аппарат для наложения швов может быть легко вставлен в любую узкую и глубокую полость. Далее,вместе с хирургическим аппаратом для наложения швов в соответствии с настоящим изобретением может использоваться эндоскоп для обеспечения обзора оператором места сшивания или пару микропинцетов для поднятия сшиваемых человеческих тканей. В соответствии с другим вариантом настоящего изобретения, хирургический аппарат для наложения швов может включать соединительную часть 10,часть типа вала 20, операционную часть 30 и шьющую часть 40, как описано на фиг. 2, в котором форма шьющей части 40 изменена до некоторой степени. Фиг.3 представляет собой детальное изображение,иллюстрирующее взаимное расположение элементов шьющей части 40 хирургического аппарата для наложения швов в соответствии с другим вариантом настоящего изобретения. На фиг.3 шьющая часть 40 может включать верхнюю опору 41 и нижнюю опору 42, которые находятся друг напротив друга, хирургическую иглу 44 и часть управления иглой 46 для размещения хирургической иглы 44 и приведения в действие хирургической иглы 44 в направлении, существенно ортогональном к нижней опоре 42. Далее, часть управления иглой 46 может быть расположена в верхней опоре 41 и выполнена с возможностью двигаться в предопределенном диапазоне вдоль линии направляющей 47, расположенной на верхней опоре 41. В соответствии с настоящим вариантом, длину части вала 20 не нужно увеличивать или уменьшать,потому что часть управления иглой 46 проходит вдоль линии направляющей 47 и движется для выполнения сшивания. В этом состоит различие между настоящим вариантом и описанными выше. В случае применения хирургического аппарата для наложения швов в соответствии с вышеупомянутым вариантом в инвазивной хирургии, проблема может возникнуть в связи с тем,что отверстие или канал, используемый для инвазивной хирургии, обязан быть большим из-за относительно большой ширины верхней опоры 41 и нижней опоры 42. Чтобы решить эту проблему, как описано на фиг.4, к шьющей части 40 может быть присоединена поворотная часть 50. Фиг.4 представляет собой детальное изображение,иллюстрирующее поворотную часть 50, присоединенную к шьющей части 40. На фиг.4 поворотная часть 50 может быть присоединена к шьющей части 40 так, чтобы она могла вращаться внутри предопределенного углового диапазона, и шьющая часть 40,присоединенная к поворотной части 50, может быть выполнена так, чтобы вращаться вместе с поворотной частью 50. Поэтому, до того как шьющая часть 40 будет введена через хирургическое отверстие, верхняя опора 41 и нижняя опора 12 могут быть размещены в ряд с частью типа вала 20 управлением поворотной частью 50. После этого, направление шьющей части 40 может быть изменено, чтобы быть выгодным для сшивания повторно управлением поворотной частью 50. Фиг.5 представляет собой изображение,иллюстрирующее вид хирургического аппарата для наложения швов в соответствии с еще одним вариантом настоящего изобретения. Согласно еще одному варианту настоящего изобретения,хирургический аппарат для наложения швов может включать первую соединительную часть 10 а,вторую соединительную часть 10, первую часть типа вала 20 а, вторую часть типа вала 20, первую операционную часть 30 а, вторую операционную часть 30, нижнюю опору 42, хирургическую иглу 44 и часть управления иглой 46, соединенную с ней. В соответствии с настоящим вариантом, верхняя часть шьющей части 40,включающая хирургическую иглу 44 и часть управления иглой 46, может быть связана с первой соединительной частью 10 а и первой частью типа вала 20 а посредством первой операционной части 30 а, как показано на фиг.5, и нижняя часть шьющей части 40, имеющая нижнюю опору 42, может быть соединена со второй соединительной частью 10 и второй частью типа вала 20 посредством второй операционной части 30, как показано на фиг.5. Здесь, первая соединительная часть 10 а, первая часть типа вала 20 а и первая операционная часть 30 а могут быть отделены от второй соединительном части 10, второй части типа вала 20 и шорой операционной части 30. В соответствии с настоящим вариантом,совместные движения частей, в то время как хирургический аппарат для наложения швов используется в человеческом теле, могут стать более свободными. Другими словами,первая операционная часть 30 а и вторая операционная часть 30 хирургического аппарата для наложения швов могут выполнять различные друг от друга совместные движения по мере необходимости, и таким образом, верхняя часть и нижняя часть шьющей части 40 хирургического аппарата для наложения швов могут управляться отдельно друг от друга. Далее, по мере необходимости, первая операционная часть 30 а и вторая операционная часть 30 могут управляться двумя манипуляторами одной хирургической робот-системы. соответственно. В этом случае, один манипулятор может быть связан с любой первой операционной частью 30 а и второй операционной частью 30,чтобы управлять первой операционной частью 30 а и второй операционной частью 30, независимо от формы первой соединительной части 10 а или второй соединительной части 10. В случае применения вышеупомянутых конфигураций (а именно, конфигураций для раздельного типа хирургического аппарата для наложения швов) могут быть найдены следующие преимущества. Во-первых, не потребуется вводить весь хирургический аппарат для наложения швов через один хирургический порт, даже когда сшиваются ткани трубчатого органа, и таким образом, будет легче выполнить шов вокруг трубчатого органа и удалить хирургический аппарат для наложения швов из хирургического порта после сшивания. Далее,меньшие по размерам хирургические порты для введения хирургических аппаратов для наложения швов можно использовать не только в случае сшивания тканей трубчатого органа, но и случае, когда инвазивная хирургия выполняется при помощи множества хирургических портов. Это может привести к снижению боли,5 быстрому восстановлению и регенерации тканей и к сведению к минимуму рубцов. В соответствии с предпочтительным вариантом настоящего изобретения, хирургический аппарат для наложения швов может быть осуществлен в следующем, более сложном виде. Во-первых,хирургическая робот-система для управления первой операционной частью 30 а и второй операционной частью 30 может собрать историю работы первой операционной части 30 а и обнаружить местоположение первой шьющей части 40 а относительно контрольной точки. Согласно изобретению, предполагается, что первая шьющая часть 40 а предварительно размещена около сшиваемых тканей,и контрольная точка предопределена хирургической робот-системой. В этом случае, хирургическая робот-система может автоматически управлять второй операционной частью 30 на основе истории работы первой операционной части 30 а и местоположением первой шьющей части 40 а так, чтобы вторая шьющая часть 40 могла быть расположена близко к первой шьющей части 40 а. И затем, оператор может точно расположить нижнюю опору 42 второй шьющей части 40 так, чтобы разместить напротив верхней опоры 41 первой шьющей части 40 а. Для осуществления вышеупомянутого, могут быть использованы методики контроля местоположения,известные из предшествующего раскрытия(например, американской заявки, опубликованной под 2004-143243 (опубликована 22 июля 2004. Несмотря на продемонстрированные и описанные выше варианты изобретения,очевидными для специалистов способами могут быть сделаны различные изменения и модификации,не отступая от сущности и области изобретения, как определено в следующих пунктах формулы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Хирургический аппарат для наложения швов с функцией сшивания,включающий опору,хирургическую иглу и часть управления иглой,отличающийся тем, что опора, хирургическая игла и часть управления иглой образуют шьющую часть,хирургическая игла выполнена с возможностью воздействия на опору посредством части управления иглой, и первая нить для сшивания из хирургической иглы, и вторая нить для сшивания из опоры, переплетаются друг с другом во время работы устройства. 2. Хирургический аппарат для наложения швов с функцией сшивания по п.1, отличающийся тем,что дополнительно содержит операционную часть,которая включает по крайней мере одну соединительную часть для обеспечения шьющей части возможностью совместного перемещения. 3. Хирургический аппарат для наложения швов с функцией сшивания по п.1, отличающийся тем,что шьющая часть предназначена для выполнения по крайней мере одного шва, выбранного из следующих швов трехслойный шов, трехстрочный шов, четырехстрочный шов, зигзагообразный шов,параллельный шов, двухигольный шов, упругий шов, подшивочный шов, вышивание, пришивание,слепой шов, обвивной шов и лигатурный шов. 4. Хирургический аппарат для наложения швов с функцией сшивания по п.1, отличающийся тем,что часть управления иглой выполнена с возможностью перемещения вдоль направляющей. 5. Хирургический аппарат для наложения швов с функцией сшивания по п.1, отличающийся тем,что и опора, и часть управления иглой включают поворотную часть.
МПК / Метки
МПК: A61B 17/072
Метки: наложения, швов, хирургический, сшивания, аппарат, функцией
Код ссылки
<a href="https://kz.patents.su/8-27213-hirurgicheskijj-apparat-dlya-nalozheniya-shvov-s-funkciejj-sshivaniya.html" rel="bookmark" title="База патентов Казахстана">Хирургический аппарат для наложения швов с функцией сшивания</a>
Способ наложения швов на почечную лоханку после пиелолитотомии
Номер инновационного патента: 25526
Опубликовано: 15.03.2012
Авторы: Айтказин Бейбут Мухтарович, Токтабаянов Биржан Галымович, Омаров Ернар Сарсенбекович, Сенгирбаев Дауренбек Исакович, Алчинбаев Мырзакарим Каримович, Испосунова Гульнара Ахметказыевна, Кожабеков Бахыт Самсалиевич
МПК: A61B 17/00
Метки: наложения, пиелолитотомии, почечную, швов, после, лоханку, способ
Формула / Реферат:
Изобретение относится к медицине, а именно к урологии и может быть использовано для наложения провизорных швов при ушивании почечной лоханки после пиелолитотомии.Способ наложения швов на почечную лоханку после пиелолитотомии включает введение в полость чашечно-лоханочной системы катетера Фолея №14-16 в зависимости от её объёма, проведение раздувания баллончика катетера и наложения провизорных швов на края разреза стенки почечной лоханки с...
Способ наложения блокирующих швов при лечении повреждений сухожилий сгибателей пальцев кисти
Номер инновационного патента: 23939
Опубликовано: 16.05.2011
Авторы: Баубеков Мейрам Бейсембаевич, Батпенов Нурлан Джумагулович, Рахимов Серик Кульчанович
МПК: A61L 17/00, A61B 17/00
Метки: пальцев, повреждений, сухожилий, сгибателей, лечении, блокирующих, кисти, способ, наложения, швов
Формула / Реферат:
Изобретение относится к медицине, а именно к травматологии и ортопедии, и может быть использовано при лечении больных с повреждением сухожилий сгибателей пальцев кисти.Сущность способа лечения повреждений сухожилий сгибателей пальцев кисти путем наложения блокирующих швов, заключается в размещении поверх восстановленного сухожилия сгибателя на всём протяжении синовиально-апоневротического канала двух толстых монофильных нитей, каждая из которых...
Хирургический способ ушивания ран
Номер предварительного патента: 17177
Опубликовано: 14.04.2006
Автор: Енсебаев Ерлан Жалелович
МПК: A61B 17/04
Метки: хирургический, способ, ушивания, ран
Формула / Реферат:
Изобретение относится к медицине, а именно к способам хирургического ушивания послеоперационных ран.Хирургический способ ушивания ран включает наложение непрерывных швов, отличительной при этом дополнительно в наиболее углубленных местах раны накладывают чрескожные узловые швы с захватом дна раны, при этом концы ниток выводят на кожу и завязывают на узел.Способ позволяет значительно снизить вероятность нагноения и добиться первичного заживления...
Способ наложения клапанного илеотрансверза анастомоза бок в конец
Номер предварительного патента: 14261
Опубликовано: 05.05.2004
Авторы: Ильясов Анатолий Васильевич, Дудник Вячеслав Юрьевич, Акмалов Юрий Михайлович, Ганцев Шамиль Ханафиевич, Гатаулин Наиль Гайнатович
МПК: A61B 17/11
Метки: клапанного, способ, конец, бок, наложения, илеотрансверза, анастомоза
Формула / Реферат:
Изобретение относится к области медицины, в частности к хирургии, и может быть использовано при операциях на правой половине ободочной кишки. Способ наложения клапанного илеотрансверза анастомоза бок в конец включает поперечное пересечение подвздошной и ободочной кишки, ушивание культи подвздошной кишки, сужение просвета ободочной кишки с последующим рассечением стенки подвздошной кишки в месте наложения анастомоза, наложение швов, формирование...
Способ артроскопического сшивания разорванного мениска коленного сустава
Номер инновационного патента: 22716
Опубликовано: 16.08.2010
Автор: Абдуразаков Арман Уразбаевич
МПК: A61B 17/04
Метки: коленного, сшивания, способ, артроскопического, разорванного, мениска, сустава
Формула / Реферат:
Изобретение относится к медицине, а именно - к травматологии, и может быть использовано при сшивании разорванного в паракапсулярной зоне мениска коленного сустава.Способ осуществляют путем проведения иглы в направлении снаружи внутрь через паракапсулярную часть и оторванный фрагмент у нижнего края мениска, проведения через нее нити с помощью проволочного проводника с замкнутой петлей, выведении конца нити в обратном направлении и последующим...
Предыдущий патент: Ручка для мебели
Следующий патент: Вертлужный компонент бесцементной фиксации для эндопротезирования тазобедренного сустава “KazNIITO-II”
Случайный патент: Способ и устройство для повышения качества слитка стали