Способ определения координаты объекта
Номер инновационного патента: 30901
Опубликовано: 15.02.2016
Авторы: Кузубаев Радмир Галиуллаевич, Рутгайзер Олег Зиновьевич
Формула / Реферат
Изобретение относится к радиолокации, в частности к способам контроля наличия наземных объектов в охраняемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра особо охраняемой зоны важных стратегических объектов, водозаборов, хранилищ и др. объектов при необходимости определения места вторжения.
Задачей изобретения является разработка эффективного способа определения координаты объекта в условиях его движения с остановками через контролируемую зону.
Способ определения координаты объекта в контролируемой зоне предоставляет возможность повысить эффективность и достоверность сигналов фиксации объекта при движении с остановками. Повышение эффективности системы при движении наземного объекта с остановками достигается за счет того, что способ позволяет формировать положения баз в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности системы и отказаться от измерения доплеровской частоты сигнала. Повышение достоверности сигналов достигается за счет возможного многократного дублирования информации.
Текст
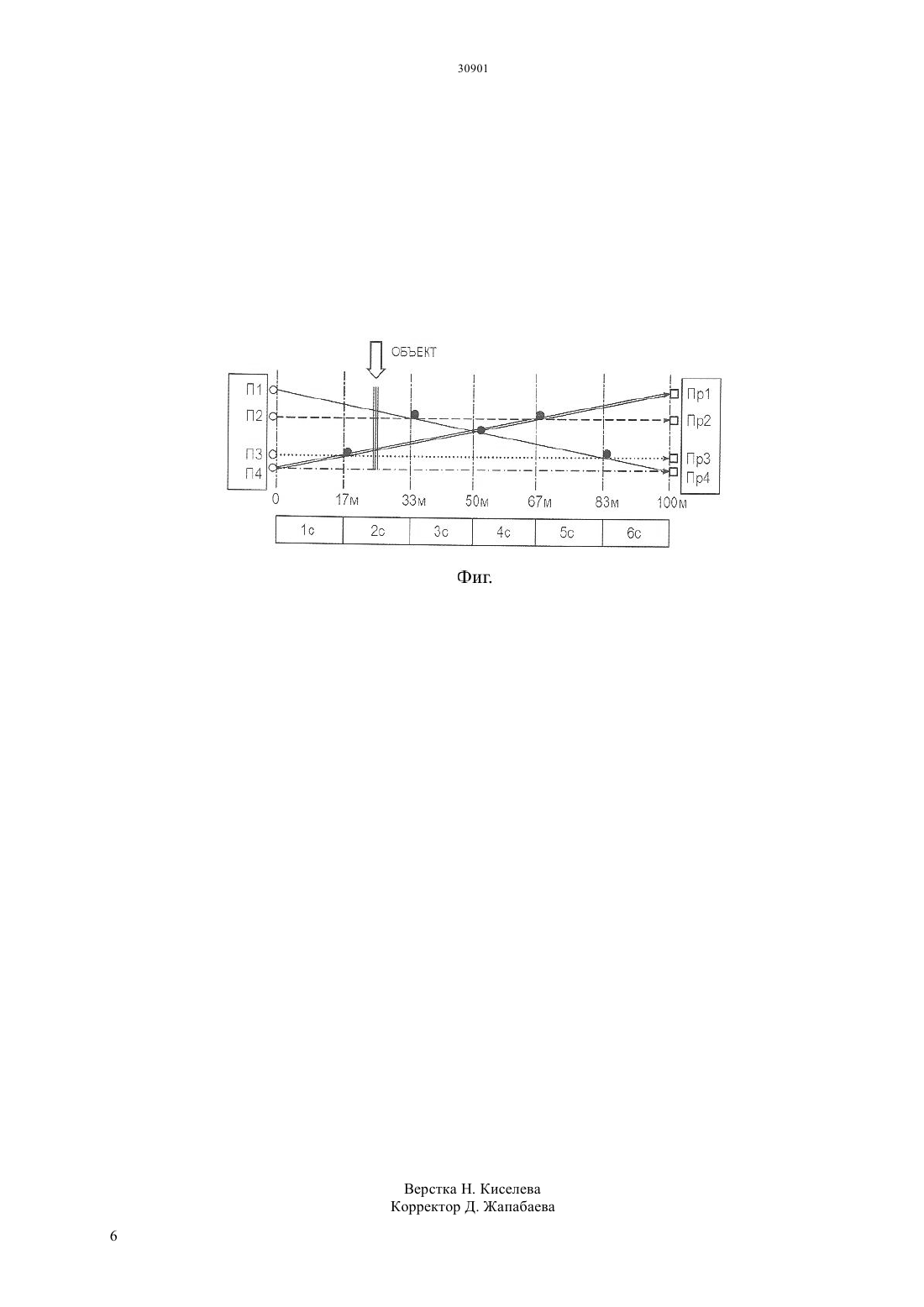
(51) 01 1/00 (2006.01) 01 5/00 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ водозаборов, хранилищ и др. объектов при необходимости определения места вторжения. Задачей изобретения является разработка эффективного способа определения координаты объекта в условиях его движения с остановками через контролируемую зону. Способ определения координаты объекта в контролируемой зоне предоставляет возможность повысить эффективность и достоверность сигналов фиксации объекта при движении с остановками. Повышение эффективности системы при движении наземного объекта с остановками достигается за счет того, что способ позволяет формировать положения баз в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности системы и отказаться от измерения доплеровской частоты сигнала. Повышение достоверности сигналов достигается за счет возможного многократного дублирования информации.(72) Рутгайзер Олег Зиновьевич Кузубаев Радмир Галиуллаевич(73) Некоммерческое акционерное общество Алматинский университет энергетики и связи(56) Просветные многопозиционные радиолокационные системы на основе измерения доплеровской частоты, Ф.Н. Ковалев, Труды Нижегородского государственного технического университета, 2011(54) СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ ОБЪЕКТА(57) Изобретение относится к радиолокации, в частности к способам контроля наличия наземных объектов в охраняемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра особо охраняемой зоны важных стратегических объектов, 30901 Изобретение относится к радиолокации, в частности к способам контроля наличия наземных объектов в охраняемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра особо охраняемой зоны важных стратегических объектов,водозаборов, хранилищ и др. объектов при необходимости определения места вторжения. Для охраны периметра широко используются двухпозиционные радиолучевые системы. Такие системы состоят из передатчика и приемника СВЧсигналов. Между передатчиком и приемником формируется чувствительная зона с поперечным сечением до нескольких метров. Системы охраны периметра зоны определяют только факт пересечение нарушителем чувствительной зоны при изменении сигнала мощности в приемнике, но такие системы не позволяют определить координату объекта. Обычно протяженность пролета зоны охраны периметра составляет до нескольких сотен метров. Поэтому для таких расстояний определение места вторжения позволило бы существенно повысить эффективность охранной системы. Простейший способ определения координат объекта при пересечении объектом линии базы(прямая линия между передатчиком и приемником)- это уменьшение размеров протяженности отдельного звена пролета до величины желаемой точности определения места вторжения и увеличение числа таких звеньев. В такой системе не увеличивается надежность определения наличия объектов, но возрастает число установленного дополнительного оборудования. Известны способы определения координат объекта, которые предусматривают использование одного передатчика и двух приемников. Такая система предусматривает формирование виртуального треугольника, в которой положение объекта относительно передатчика определяют по моментам времени пересечения двух сторон треугольника при известной постоянной скорости перемещения объекта. Однако изменение скорости объекта или его остановка приводит к значительным ошибкам определения координаты объекта. Известен радиолокационный способ определения параметров движения объекта, основанный на приеме в удаленной от источника излучения точке зондирующего сигнала и сигнала вторичного излучения объекта, выделении из них путем детектирования интерференционного сигнала биений, измерении частоты этого сигнала (частота доплера),при измерении частоты интерференционного сигнала одновременно определяют направление прихода интерференционного сигнала и момент времени,когда частота интерференционного сигнала переходит через нуль, после чего по измеренным величинам параметры траектории определяют как координаты точки пересечения линии направления прихода интерференционного сигнала и поверхности положения,определяемой по значениям частоты интерференционного сигнала и момента перехода этой частоты через нуль (Патент 2 2133480, МПК 01 3/72, 01 7/42,опубликовано 20.07.1999 г.). Недостатком способа является то, что диапазон доплеровских частот отраженных от объекта сигнала перекрывается спектром пассивной помехи и возникают значительные ошибки при определении момента времени перехода через нуль частоты интерференционного сигнала,при этом радиолокационное обнаружение медленно движущихся или движущихся с остановками наземных объектов затруднено или невозможно. Известен способ определения координат цели в просветном радиолокаторе с разнесенным приемом,состоящей из передатчика и двух приемников установленных на фиксированном расстоянии друг от друга, вычисляют угловые скорости по разности доплеровских частот сигнала, прогнозируют траекторию с оценкой времени пересечения целью отрезков между передатчиком и приемниками и вычисляют координаты движения цели. (. Алгоритм определения координат цели в просветной радиолокации с разнесенным приемом,Ковалев А.Н., Ковалев Ф.Н., Труды Нижегородского государственного технического университета 1, 2014) Недостатком способа является то,что прогнозирование траектории и определение координат наземного объекта, движущегося с небольшой скоростью или с остановками, когда частота доплера равна нулю, существенно затруднено. Наиболее близким к предлагаемому изобретению, является способ обнаружения и определения координат объекта в просветной многопозиционной радиолокационной системе на основе измерений доплеровской частоты,сформированной передатчиками, приемниками и антенными устройствами, установленными на передающей и приемной позициях, а также линиями баз (отрезок пространства между передатчиком и приемником) при этом часть линий баз параллельны между собой, а другие линии баз (диагональные) сформированы от передатчиков под разными углами к одной из параллельных базовых линий,включающий излучение гармонического сигнала и обработку сигнала приемника, при этом частоты передатчиков смещены между собой, включающий фиксацию величин набора первичных параметров сигнала, характеризующих появление объекта на линии базы, а именно измерение доплеровских частот для всех линий баз, определение момента равенства нулю доплеровских частот, фиксацию наличия объекта в контролируемой зоне и определение его координат при отклонении этих первичных параметров от порогового значения.(. Ф.Н. Ковалев. Просветные многопозиционные радиолокационные системы на основе измерения доплеровской частоты, Труды Нижегородского государственного технического университета 3,2011). Недостатком данного способа при определении координаты движущегося объекта, при наличии остановок, затруднено, так как измерение доплеровских частот,определение момента равенства нулю доплеровских частот на линии базы выполняется с существенными ошибками. Кроме того, возникают сложности использования сигнала доплеровских частот при фиксации наземных объектов из-за влияния отражения сигнала от поверхности земли. Задачей изобретения является разработка эффективного способа определения координат объекта в условиях его движения с остановками через контролируемую зону. Технический результат изобретения - повышение эффективности и достоверности сигналов фиксации объекта при движении с остановками достигается за счет того, что способ позволяет формировать положения баз, в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности системы и отказаться от измерения доплеровской частоты сигнала повышение достоверности сигналов достигается за счет возможного многократного дублирования информации. Для достижения технического результата способ определения координаты объекта, сформированной в контролируемой зоне передатчиками,приемниками и антенными устройствами,установленными на передающей и приемной позициях, а также виртуальными линиями баз(отрезок пространства между передатчиком и приемником), при этом часть линий баз параллельны между собой, а другие линии баз(диагональные) сформированы от передатчиков под разными углами к одной из параллельных базовых линий, включающий излучение гармонического сигнала и обработку сигнала приемника, смещение частоты передатчиков между собой, включающий фиксацию величины набора первичных параметров сигнала, характеризующих появление объекта на линии базы, фиксацию наличия объекта в контролируемой зоне и определение его координаты при отклонении этих параметров от порогового значения, согласно изобретению, в контролируемой зоне формируют, для параллельных линий баз неравные величины расстояний между ними, в зависимости, от точности системы, в качестве первичных параметров измеряют мощность сигналаприемников, фиксируют изменение мощностина входе приемника при последовательном пересечении объектом каждой линии базы,определяют максимальное изменение значения мощностиприемника в момент пересечения баз, измеряют и запоминают моменты времени Пр последовательного пересечения объектом линий баз с использованием , определяют направление движения объекта в зависимости от сигнала Пр пересечения объектом первой параллельной базы по ходу движения, определяют сектор перемещения объекта с учетом момента пересечения между собой диагональных баз, определение координаты объекта выполняют в рамках одного из сечений зоны контроля на основе логических операций, с учетом значений Пр и условий пересечения базовых линий между собой условия пересечения базовых линий между собой формируют предварительно на основе информации о направлении движения объекта,секторе зоны и границах, соответствующих моменту пересечению базовых линий между собой, при этом запоминают условия пересечения сечениям зоны контроля присваивают номера, а координату объекта принимают равной половине промежутка сечения количество базовых линий в контролируемой зоны выбирают, в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности определения положения объекта. Предлагаемое изобретение поясняется схемой,представленной на фиг.1. На схеме фиг.1 обозначены- П 1, П 2, П 3, П 4 - антенные устройства и передатчики передающей позиции,- Пр 1, Пр 2, Пр 3, Пр 4 - приемники приемной позиции,- 1 с, 2 с, 3 с, 4 с, 5 с, 6 с - сечения контролируемой зоны,- отрезок сплошная линия - базовая линия П 1 Пр 4,- отрезок штрих - базовая линия П 2-Пр 2,- отрезок пунктир - базовая линия П 3-Пр 3,- отрезок штрих пунктир - базовая линия П 4 Пр 4,- отрезок двойная сплошная линия - базовая линия П 4-Пр 1,- темные точки - координаты пересечения базовых линий,- тройная сплошная линия - траектория движения объекта,- стрелка - направление движения объекта. Предлагаемый способ определения координаты объекта в контролируемой зоне реализуется следующим образом. Система является многопозиционной и состоит из определенного числа передатчиков и приемников, во время работы, которых образуются каналы (линия базы) передачи электромагнитной энергии - радиолучи. Канал имеет объемную зону обнаружения - вытянутый эллипсоид вращения,диаметр которого зависит от рабочей частоты излучения передатчика и расстояния между передатчиком и приемником. Поперечные размеры зоны обнаружения включаютзон. Основная доля энергии передается внутри первой зоны Френеля,радиус которой равен 1, внутри первой зоны обычно выделяют минимальную зону Френеля 0. Экранирование объектом этой зоны Френеля приводит к значительному ослаблению напряженности поля в зависимости от площади перекрытия сигнала. Радиус минимальной зоны Френеля 0 для середины расстояния между передатчиком и приемником, которые установлены на расстоянии , равен 0, где- длина волны сигнала для Если нарушитель находится на расстоянии от базовой линии большем, чем радиус 0, то на приемной антенне наблюдается практически напряженность поля,соответствующая напряженности сигнала приемника при отсутствии объекта,что характерно для небольшой чувствительности приемника, соответствующей типовым устройствам наземных радиолучевых систем. Когда нарушитель пересекает середину зоны 0 базовой линии, приемный модуль регистрирует изменения уровня принимаемого сигнала и времяпересечения линии базы. Интенсивность этих изменений зависит от размеров нарушителя. При этом промежуток временимежду двумя пересечениями баз характеризует путь,который проделал объект при пересечении зоны для данной траектории перемещения (при постоянной скорости перемещения). Количество базовых линий системы определяется в зависимости от желаемой ошибки определения координат объекта в контролируемой зоне, а, следовательно, от количества сечений контролируемой зоны. Количество сечений может быть выбрано разным 2,4, 6 и т.д. При длине пролета 100 м и 4 сечениях ошибка оценки положения объекта составит 12,5 м, при 6 сечениях ошибка оценки положения объекта составит 8,5 м, при двух сечениях ошибка оценки положения объекта составит 25 м. Пример работы системы в соответствии с предлагаемым способом. На фиг.1 представлена схема контролируемой зоны, разбитая на два сектора и шесть сечений. Ширина контролируемой зоны 10 м, длина зоны 100 м. На передающей позиции зоны установлены в линию четыре передатчика П 1, П 2, с расстоянием 3,4 м между ними и расстоянием 1,7 м - между П 3,П 4. На приемной позиции установлено четыре приемника Пр 1, Пр 2, Пр 3, Пр 4 с аналогичными расстоянием между парами. Контролируемая зона включает кроме передатчиков и приемников пять виртуальных линий баз. Расстояние между параллельными линиями баз разное для баз (П 3 Пр 3 и П 4-Пр 4) равно 01,7 м, а для баз (П 2- Пр 2 и П 4- Пр 4) равно 16,6 м, положение баз занесено в память ЦВМ. Частоты генераторов , 2, 3, 4 соответствующих передатчиков разнесены между собой. Значение частоты 1 24,5 ГГц. Для частоты 1 значение радиуса нулевой зоны 0(0,01250,25 100/3)0,50,32 м. Приемник Пр 4 фиксирует две частоты частоту сигнала П 1 и П 4. Объект перемещается с постоянной скоростью и остановками. Направление перемещения объекта,скорость, траектория и длительность остановок перемещения объекта не известны до проведения измерений. Исходные параметры объект перемещается по траектории 1 со скоростью 1 м/с, при этом координата объекта 25 м от передатчиков, т.е. объект движется через сечение 2 (между 17 м и 34 м),длительность остановки объекта составляет 2,5 с,направление движения совпадает со стрелкой Фиг.1. В соответствии со способом измеряют изменения мощности сигнала приемников. Измеряют моменты пересечения объектом линий баз Пр 41, Пр 2, П 1, Пр 3,П 44. Индексывключают номер приемника, причем приемник 4 измеряет две сдвинутые частоты от разных передатчиков П 1 (П 41) и П 4(П 44). При этом результаты измерения определяют моменты времени пересечения соответствующих баз с учетом остановки объекта П 410, П 20,9, П 15,Пр 35,8, Пр 447.52.510. Определяют направление движения. Первый зафиксированный сигнал пересечения траекторией параллельных линий баз - Пр 2. Для этого варианта первая параллельная база (П 2-Пр 2), следующая параллельная база (П 4-Пр 4). При этом Пр 2 П 44,следовательно, направление пересечения совпадает с направлением стрелки(фиг.1). Для противоположного направления движения объекта изменяется порядок зафиксированных сигналов. Первый зафиксированный сигнал в этом случае П 44, при этом Пр 44 Пр 2. Определяют сектор движения объекта. Выделяют два сектора, граница между ними определяется моментом пересечения диагональных баз П 4-Пр 1 и П 1-Пр 41, т.е. равенством(П 1,Пр 4)(П 4,Пр 1), при этом сектор 1 располагается до пересечения диагональных баз, сектор 2 - после момента пересечения диагональных баз. В соответствии с Фиг.1 для данного направления перемещения Пр 41 П 1,т.е. неравенство отрицательное (05 с). Таким образом, объект перемещается в секторе 1 в одном из сечений 1, 2 или 3. Предварительно для разных направлений перемещения объекта, разных секторов положения объекта формируют таблицы логических условий нахождения объекта в границах определенного сечения. Для данного примера и выбранного направления движения необходимы две таблицы. Таблица. 1 Границы логических условий сечений для сектора 1. а) Для траектории объекта в границах сечения 1(фиг.1) должны выполняться неравенства П 41 П 2 и П 3 П 1. в) Для траектории объекта в границах сечения 2(фиг.1) должны выполняться неравенства Пр 41 П 2 и П 3 П 1. с) Для траектории объекта в границах сечения 3(фиг.1) должны выполняться неравенства П 41 П 2 и П 3 П 1. Таблица 2. Границы сечений логических условий для сектора 2. а) Для траектории объекта в границах сечения 4(фиг.1) должны выполняться неравенства П 1 П 2 и П 3 П 41. в) Для траектории объекта в границах сечения 5(фиг. 1) должны выполняться неравенства П 1 П 2 и П 3 П 41. с) Для траектории объекта в границах сечения 6(фиг.1) должны выполняться неравенства П 1 П 2 и П 3 П 41. Для фиксации положения объекта в одном из сечений зоны необходимо и достаточно выполнение двух условий, представленных в таблицах для зафиксированного сектора движения объекта. Для определения сечения траектории движения объекта в секторе 1 сравнивают последовательно результаты измерений (П 410, П 20,9, П 15,П 35,8 с, П 447.52,510) с условиями таблицы 1 и определяют выполнение требуемых неравенств для разных сечений а) фактические результаты измерений траектории в сечении 1 соответствуют условиям только для первого условия 00,9 с, второе условие не выполняется, так как 5,8 с больше 5 с. в) фактические результаты измерений траектории в сечении 2 выполняются для всех условий первое условие выполняется 00,9 с, второе условие выполняется, так как 5,8 с больше 5 с. с) фактические результаты измерений траектории в сечении 3 соответствуют только для одного условия. Первое условие не выполняется, так как 00,9 с, второе условие выполняется, так как 5,8 с больше 5 с. Таким образом, требуемые условия выполняются только для сечения 2, т.е. способ позволяет определить координату объекта. Принимая за координату объекта середину сечения 2 равную 25 м,получаем, что для данной траектории ошибка определения равна нулю. Для других траекторий в сечении 2 максимальная ошибка не превышает 8,5 м. Такая же величина максимальной ошибки справедлива для других сечений и любой длительности остановки объекта. Реализовать способ обнаружения координат объекта можно при использовании разработок, на основе которых реализованы действующие системы обнаружения наземных объектов. Например,извещатель Радий-2 (использует частоту 9,5 ГГц),извещатель РМ 24-800 (использует частоту - 24,5 ГГц), извещатель Тантал-200 (использует частоту 24 ГГц). Логические устройства, принимающие решения относительно сигналов определяющих направления движения объекта, определения сектора и сечения в контролируемой зоне, могут быть реализованы с использованием типовых устройств электроники. Таким образом,предлагаемый способ определения координаты объекта в контролируемой зоне предоставляет возможность повысить эффективность и достоверность сигналов фиксации объекта. Повышение эффективности системы при движении наземного объекта с остановками достигается за счет того, что способ позволяет формировать положения баз в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности системы и отказаться от измерения доплеровской частоты сигнала. Повышение достоверности сигналов достигается за счет возможного многократного дублирования информации. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения координаты объекта,сформированной в контролируемой зоне передатчиками,приемниками и антенными устройствами, установленными на передающей и приемной позициях, а также виртуальными линиями баз (отрезок пространства между передатчиком и приемником), при этом часть линий баз параллельны между собой, а другие линии баз(диагональные) сформированы от передатчиков под разными углами к одной из параллельных базовых линий, включающий излучение гармонического сигнала передатчиком и обработку сигнала приемника, смещение частоты передатчиков между собой, включающий фиксацию величины набора первичных параметров сигнала, характеризующих появление объекта на линии базы, фиксацию наличия объекта в контролируемой зоне,определение координаты объекта при отклонении первичных параметров от порогового значения,отличающийся тем, что в контролируемой зоне для параллельных линий баз формируют неравные величины расстояний между ними в зависимости от точности системы,в качестве первичных параметров измеряют мощность сигналаприемников, фиксируют изменение мощностина входе приемника при последовательном пересечении объектом каждой линии базы,определяют максимальное изменение значения мощностиприемника в момент пересечения баз, измеряют и запоминают моменты времени Пр пересечения объектом линий баз с использованием, определяют направление движения объекта в зависимости от сигнала Пр пересечения объектом первой параллельной линии базы по ходу движения объекта, определяют сектор перемещения объекта с учетом момента пересечения между собой диагональных баз, определение координаты объекта выполняют в рамках одного из сечений зоны контроля на основе логических операций с учетом значений Пр и условий пересечения базовых линий между собой. 2. Способ по п.1, отличающийся тем, что условия пересечения базовых линий между собой формируют предварительно на основе информации о направлении движения объекта, секторе зоны и границах, соответствующих моменту пересечению базовых линий между собой, при этом запоминают условия пересечения. 3. Способ по п.1, отличающийся тем, что сечениям зоны контроля присваивают номера, а координату объекта принимают равной половине промежутка сечения. 4. Способ по п.1, отличающийся тем, что количество базовых линий контролируемой зоны выбирают в зависимости от требуемого количества виртуальных сечений, т.е. желаемой точности определения положения объекта.
МПК / Метки
Метки: определения, способ, координаты, объекта
Код ссылки
<a href="https://kz.patents.su/6-ip30901-sposob-opredeleniya-koordinaty-obekta.html" rel="bookmark" title="База патентов Казахстана">Способ определения координаты объекта</a>
Система определения местоположения объекта
Номер предварительного патента: 6656
Опубликовано: 15.10.1998
Автор: Васильев Иван Вениаминович
МПК: G01S 5/04
Метки: система, определения, объекта, местоположения
Формула / Реферат:
Изобретение относится к радионавигации и может быть использовано для определения местоположения объектов, в том числе подвижных, например, наземного, водного или воздушного транспорта.Система содержит базовые станции Бс 1, Бс 2, Бс 3, и БС (главная) и размещенный на определяемом объекте передатчик, который снабжен устройствами, осуществляющими модуляцию сигнала передатчика кодом опознавания и специальным синхросигналом. Каждый приемник Бс...
Способ определения координат подвижного объекта в закрытых помещениях
Номер инновационного патента: 26941
Опубликовано: 15.05.2013
Авторы: Бермагамбетова Индира Асымбековна, Рутгайзер Олег Зиновьевич, Рутгайзер Илья Олегович
Метки: объекта, способ, помещениях, определения, закрытых, координат, подвижного
Формула / Реферат:
Способ определения координат положения подвижного объекта в закрытых помещениях относится к радиотехнике и может быть использован для определения местоположения подвижного объекта на складе, ангаре или в закрытом помещении больших размеров. Техническим результатом изобретения является повышение эффективности определения координат подвижного объекта. Электронные идентификаторы (метки) закрепляют на подвижной объект, считыватели закрепляют на...
Способ определения местоположения подземного объекта
Номер патента: 3588
Опубликовано: 10.06.1996
Авторы: Гончаров Евгений Владимирович, Гончарова Любовь Алексеевна, Саптыков Иван Михайлович, Севастьянов Борис Николаевич, Голубев Юрий Борисович, Кузнецов Владислав Павлович
МПК: E21B 43/295
Метки: способ, определения, подземного, объекта, местоположения
Формула / Реферат:
Обеспечение достоверности определения огневого забоя достигается за счет инициации магнитного поля при пропускании низкочастотного переменного тока через раскаленный, реагирующий с угольным веществом, дутьевой газ. Для обеспечения надежной регистрации аномальной зоны ее определяют при совпадении трех компонент магнитного поля Кроме того, предусмотрена дополнительная ионизация дутьевого газа или раздельное измерение компонент магнитного поля,...
Способ обнаружения нарушения границы охраняемого объекта
Номер предварительного патента: 15634
Опубликовано: 15.04.2005
Автор: Радченко Эдуард Прокопьевич
МПК: G08B 13/18, G08B 13/12
Метки: нарушения, обнаружения, способ, охраняемого, объекта, границы
Формула / Реферат:
Изобретение относится к способам определения возникновения условий, вызывающих появление сигналов тревоги, и может быть использованодля контроля нарушения границы, конкретно, любых охраняемых участков или периметров большойпротяженности, где требуется сбор и отображениеинформации с сигнализационных средств контроляо проникновении через охраняемый рубеж.Техническим результатом изобретения являетсяобеспечение возможности автоматизированной охраны...
Способ определения формы и размеров уплотненной зоны грунта

Номер инновационного патента: 25759
Опубликовано: 15.05.2012
Авторы: Саимбетова Ботагоз Темирхановна, Бекбасаров Исабай Исакович, Исаков Галым Исабаевич
МПК: E02D 1/00
Метки: способ, зоны, определения, размеров, уплотненной, формы, грунта
Формула / Реферат:
Изобретение относится к строительству, в частности, к определению формы и размеров уплотненной зоны при вытрамбовывании или выштамповывании котлованов под фундаменты.Способ определения формы и размеров уплотненной зоны грунта под вытрамбованным котлованом, включает отрывку по оси котлована шурфа на глубину не менее двух ширин котлована в среднем сечении, ниже дна котлована, на вертикальную поверхность шурфа под котлованом и в стороны от него...
Предыдущий патент: Роторная машина
Следующий патент: Способ отбора молочного скота для селекции по цитогенетическому статусу
Случайный патент: Способ получения антигена для постановки кольцевой реакции с молоком при диагностике бруцеллеза