Способ определения координат подвижного объекта в закрытых помещениях
Номер инновационного патента: 26941
Опубликовано: 15.05.2013
Авторы: Бермагамбетова Индира Асымбековна, Рутгайзер Илья Олегович, Рутгайзер Олег Зиновьевич
Формула / Реферат
Способ определения координат положения подвижного объекта в закрытых помещениях относится к радиотехнике и может быть использован для определения местоположения подвижного объекта на складе, ангаре или в закрытом помещении больших размеров.
Техническим результатом изобретения является повышение эффективности определения координат подвижного объекта. Электронные идентификаторы (метки) закрепляют на подвижной объект, считыватели закрепляют на элементах конструкции помещения. Положение считывателей устанавливают с шагом между ними, обеспечивающим частичное перекрытие диаграммы направленности антенны соседнего считывателя. При приближении подвижного объекта к считывателям из его электронного идентификатора код считывают и вместе с кодами считывателей передают в ЭВМ, положение считывателей определяется сеткой, нанесенной на план помещения, коды считывателей и коды ячеек положения подвижного объекта запоминают в ЭВМ, в которой определяют координаты подвижного объекта с использованием информации о характеристиках перекрытия диаграмм направленности антенн.
Таким образом, повышение эффективности определения координат подвижного объекта в закрытых помещениях достигается за счет уменьшения числа устанавливаемых считывателей и устранения технических проблем при переходе от выносных антенн к встроенным в считыватель антеннам.
Текст
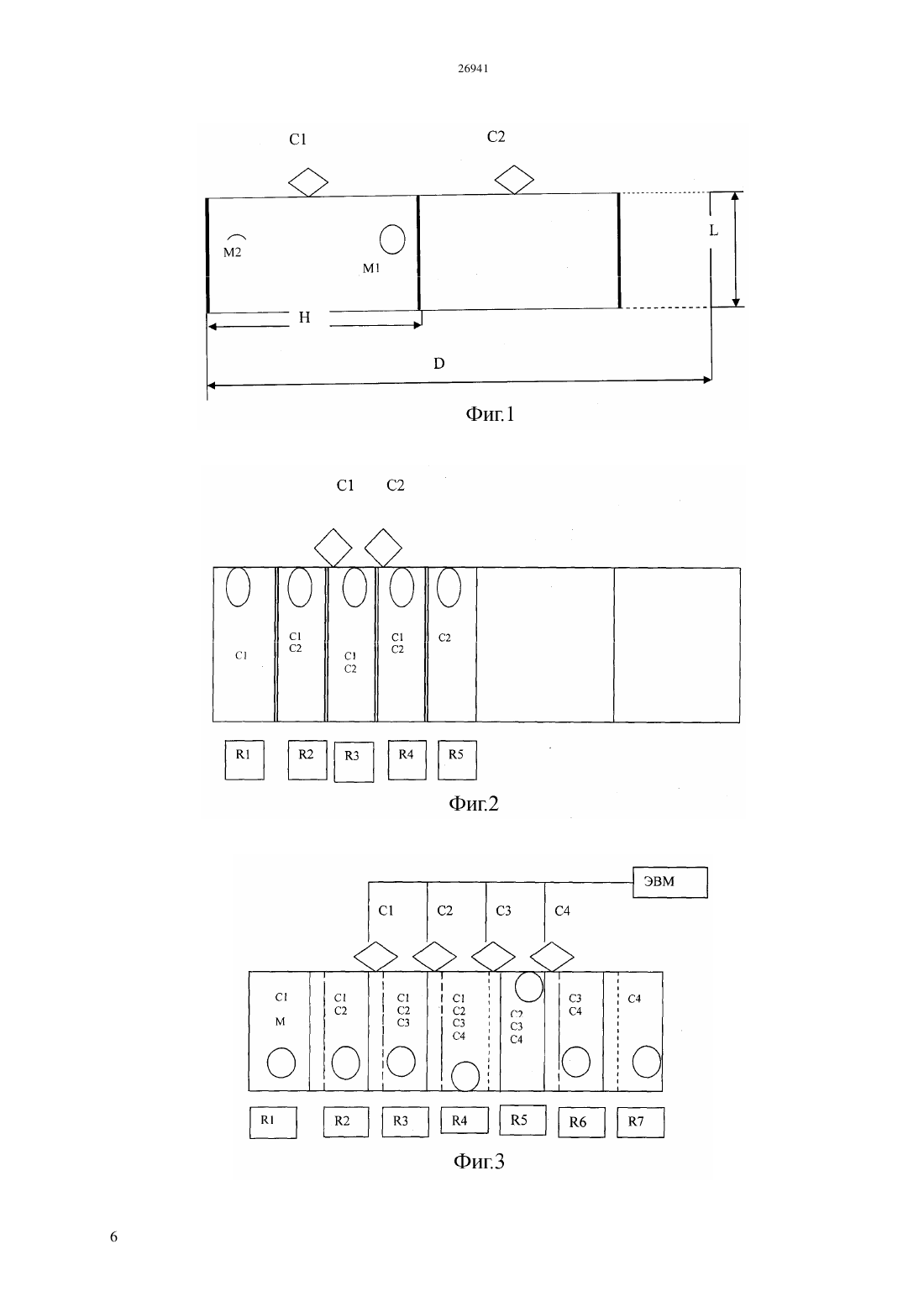
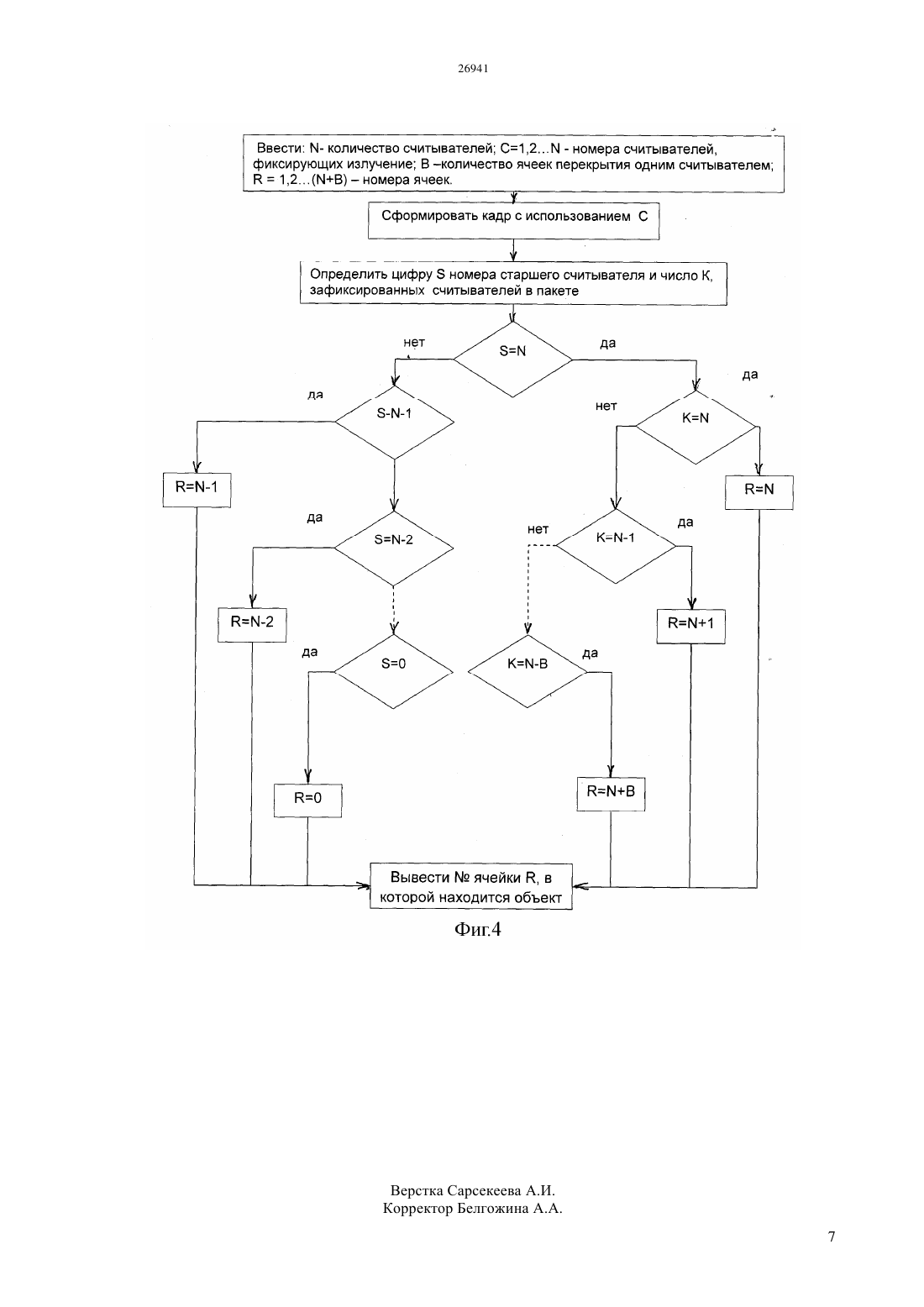
(51) 01 1/00 (2006.01) 01 5/00 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ помещения. Положение считывателей устанавливают с шагом между ними,обеспечивающим частичное перекрытие диаграммы направленности антенны соседнего считывателя. При приближении подвижного объекта к считывателям из его электронного идентификатора код считывают и вместе с кодами считывателей передают в ЭВМ, положение считывателей определяется сеткой,нанесенной на план помещения, коды считывателей и коды ячеек положения подвижного объекта запоминают в ЭВМ,в которой определяют координаты подвижного объекта с использованием информации о характеристиках перекрытия диаграмм направленности антенн. Таким образом, повышение эффективности определения координат подвижного объекта в закрытых помещениях достигается за счет уменьшения числа устанавливаемых считывателей и устранения технических проблем при переходе от выносных антенн к встроенным в считыватель антеннам.(72) Рутгайзер Олег Зиновьевич Рутгайзер Илья Олегович Бермагамбетова Индира Асымбековна(73) Некоммерческое акционерное общество Алматинский университет энергетики и связи(54) СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ(57) Способ определения координат положения подвижного объекта в закрытых помещениях относится к радиотехнике и может быть использован для определения местоположения подвижного объекта на складе, ангаре или в закрытом помещении больших размеров. Техническим результатом изобретения является повышение эффективности определения координат подвижного объекта. Электронные идентификаторы(метки) закрепляют на подвижной объект,считыватели закрепляют на элементах конструкции Изобретение относится к радиотехнике и может быть использовано для определения местоположения мобильных объектов в закрытых помещениях и,в частности,определения местоположения объекта на складе, ангаре или в закрытом помещении больших размеров. Известен способ определения местоположения объектов и система для его осуществления. Способ обеспечивает определение унифицированных координат произвольных объектов, расположенных в прямой видимости от измерителя, за счет использования(заявка 2010000055 от 27.04.2010 г.). Недостаток известного способа заключается в существенных ошибках определения координат мобильных объектов при нахождении их в закрытых помещениях. Это связано с тем фактом, что значение сигнала спутниковой навигации,передаваемого спутниками системы,существенно зависят от изменения отражающих свойств конструкций помещений. Известен способ определения местоположения перемещающегося сенсорного узла сети, согласно которому сенсорный узел, установленный на мобильном объекте, связан беспроводной связью с тремя неподвижными координационными узлами,территория поиска разделена на сетку ячеек с известными координатами, координаты объекта определяют с использованием параметров сигналов результатов радиозапросов, по результатам первого запроса выполняют преобразование координат и уточняют местоположение объекта (заявкаРСТ/ЕР 2010/059156 от 29.12.2010 г.). Недостатком способа является его сложность при использовании трех неподвижных координационных узлов и преобразовании координат для уточнения местоположения объекта в помещении ограниченной площади. Известен способ определения координат подвижного объекта в закрытых помещениях и его реализация. В указанном способе используется считыватели и радиометки при этом метки расположены по помещению с заданным расстоянием между собой, считыватель прикреплен к подвижному объекту, в качестве электронного идентификатора используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей. При перемещении объекта в помещении на его считыватель поступают коды меток, по которым координаты объекта становятся известны и передаются на ЭВМ с помощью радиомодема(Патент 2351945 от 10.04.2009 г.). Недостатком способа является высокая стоимость системы при установке считывателей на значительном количестве подвижных объектов, а также сложность конструкции радиометки. Наиболее близким к предлагаемому изобретению является способ определения координат подвижного объекта в закрытых помещениях, с использованием электронных радиочастотных идентификаторов включающий закрепление электронных идентификаторов на подвижных объектах и закрепление считывателей на элементах конструкции помещения,при приближении подвижного объекта к считывателю код электронного идентификатора считывают и вместе с кодом считывателя передают по локальной сети в ЭВМ,при этом положение считывателей определяется сеткой с постоянным шагом, коды идентификаторов и считывателей и их положение запоминают в ЭВМ и определяют координаты подвижного объекта в виде координат ячеек (патент 2284542 С 2 от 27.09.2006). При этом точность определения координат объекта соответствует величине расстояния между двумя соседними считывателями. Недостатком способа-прототипа, в условиях определения координат объекта при больших размерах помещения для выбранной рабочей частоты считывателя,является низкая эффективность определения координат подвижного объекта. Задачей изобретения является разработка способа определения координат подвижного объекта в закрытых помещениях, позволяющего повысить эффективность определения координат подвижного объекта. Технический результат от использования изобретения заключается в повышении эффективности определения координат подвижного объекта в закрытых помещениях. Поставленная задача достигается за счет того,что в предлагаемом способе определения координат подвижного объекта в закрытых помещениях с использованием электронных идентификаторов(меток) и считывателей, закрепляют электронные идентификаторы на подвижных объектах,считыватели закрепляют на элементах конструкции помещения, при приближении подвижного объекта к считывателю из его электронного идентификатора код считывают и вместе с кодом считывателя передают через контроллер локальной сети в ЭВМ,положение считывателей определяется сеткой,нанесенной на план помещения, коды считывателей и коды координат их положения запоминают в ЭВМ,в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения,согласно изобретению, положение считывателей устанавливают с шагом между ними,обеспечивающим частичное перекрытие диаграммы направленности антенны соседнего считывателя,формируют пакет, в который включают цифры номеров считывателей С, зафиксировавших в данный момент времени идентификационный номер подвижного объекта, запоминают номера всех считывателей в пакете, определение координат ячейки, в которой зафиксирован подвижной объект,выполняют в ЭВМ на основе логических операций,с учетом общего количества установленных считывателей,ширины диаграммы направленности Н, числа ячеек В перекрытия диаграммы первого считывателя соседним считывателей в пакете, числа считывателей К,зафиксировавших идентификационный номер подвижного объекта и зафиксированных в пакете,при этом число считывателейдолжно быть больше числа зон перекрытия В на единицу,каждому считывателю С и ячейкампространства помещения присваивают порядковые номера,увеличивающиеся по отношению к соседнему считывателю, начиная с единицы Технический результат обеспечивается за счет частичного перекрытия диаграмм направленных антенн соседними считывателями и выполнения логических операций с использованием информации о числе и порядке зафиксированных перекрытий ячеек при определении координат объекта. Изобретение поясняется чертежами. На фиг.1 схематически показано помещение и положение двух считывателей С 1, С 2 при отсутствии перекрытия диаграмм направленности. На фиг.2 схематически показано помещение,разбитое на ячейки, и положение двух считывателей С 1, С 2 при наличии перекрытия диаграмм направленности антенн. На фиг.3 схематически показано помещение,разбитое на ячейки, и положение четырех считывателей С 1,С 2,С 3,С 4 при наличии перекрытия диаграмм направленности антенн. На фиг.4 представлена блок схема вычислений при определении координат положения объекта. На схемах обозначены сплошная тонкая линия - границы возможных ячеек, создаваемые считывателями жирные линии - граница ширины диаграммы направленности Н антенны двойные линии - границы ячеек считывателя С 1,попадающие в зоны перекрытия считывателя С 2 сплошная и пунктирная линия - границы перекрытия ячеек, создаваемые считывателями С 1,С 2,С 3,С 4 цифры в квадратах с индексом- номера ячеек- окружности - положение мобильных объектов цифры в прямоугольниках ячеек с индексом С номера считывателей, которые фиксируют объект в каждой ячейке в данный момент. Антенны считывателя могут быть с круговой или линейной поляризацией. Диаграмма направленности антенн представляет собой эллипсоид, проекция которого на поверхность пола помещения может быть приближенно представлена в виде прямоугольника. Система определения координат объектов включает закрытое помещение с размерамии перемещающиеся объекты (изображенные в виде окружности),на которых установлены идентификаторы. Необходимое число считывателей системы определения координат закрепляют под потолком или на строительных конструкциях вдоль стен, в зависимости от варианта приемлемого для данного помещения. Идентификаторы взаимодействуют с несколькими считывателями при условии, что идентификаторы и считыватели находятся на расстоянии, не превышающем ширины диаграммы направленности антенны считывателя. Таким образом, зона действия считывателя сети такова, что в каждой точке сети объекты будут находиться в зоне покрытия, по крайней мере,одного считывателя. На фиг.1 представлена схема помещения размеромс двумя считывателями С 1,С 2,установленными на конструкциях одной из стен размером. Диаграмма направленности считывателя, ширину которой обозначим через Н,не перекрывается диаграммами направленности других считывателей, в соответствии с прототипом. Ширина диаграммы направленности антенны на фиг. 1. обозначена жирными линиями. Определим порядок величин параметров,представленных на фиг.1. Величина ошибки определения координат Е объекта, в соответствии со способом прототипа, равна расстоянию между двумя соседними считывателями. Это расстояние не может быть меньше ширины диаграммы направленности антенны считывателя Н 2 А (угол раствора). Ширина диаграммы направленности антенны Н на уровне 0,5 от ее максимального значения прямо пропорциональна длине волны сигналаи обратно пропорциональна протяженности апертуры антенны А, определяется выражением (Хмель В.Ф. Антенны и устройства СВЧ -Киев Высш. школа, 1990 г,- с.214(22 с. Н 2 А/А (рад) (1) Регламентом стандарта длясистем,предлагаемых в прототипе и используемых в промышленности, лечебных помещениях и науке,рекомендуется ряд частот сигнала, например,865 МГц, 915 МГц, 2,45 ГГц. Рабочая частота сигнала может быть выбрана из этого ряда с учетом потребностей приложений и особенных условий помещения(радиочастотная интерференция,наличие влаги, наличие металлических объектов,стоимости системы). При выбранной рабочей частоте, например,915 МГц (длина волны сигнала-33 см), ширина диаграммы направленности Н может корректироваться за счет изменения протяженности антенны А. При величине А 33 см, допустимой для встроенных антенн, размещаемых в корпусе считывателя, ширина диаграммы направленности Н в соответствии с выражением (1) равна 1 рад., т.е. 57,3 град. Ширина диаграммы направленности антенны в метрах Нм может быть определена из выражения Нм 2 А. При размерах (ширине) помещения, например, 11 м и установке считывателя на одной стене, ширина диаграммы направленности Нм равна 12 м. Следовательно,соседние считыватели должны быть размещены на расстоянии 12 метров и ошибка определения координат объектов , М 2 может составит Е 12 метра. Ошибку Е можно уменьшить, увеличивая число считывателей . Однако, при этом ширина должна диаграммы направленности Нм пропорционально уменьшаться. Например,3 снижение Е для получения ошибки равной 3 м при Нм 12 м требует увеличения протяженности антенны А в 4 раза до значения 1,32 м. При размере второй стены равной, например, 21 число считывателей составит величину 21/3 7. При установке считывателя с новой антенной и размерами А 1,32 м необходимо перейти от встроенной антенны к выносной антенне большего размера, дополнительно для связи со считывателем необходимо использовать коаксиальные кабели и необходимо принять специальные меры для исключения повреждения конструкции протяженной антенны. Таким образом, уменьшение расстояния между считывателями для уменьшения ошибки Е 3 м в рассматриваемом помещении , в соответствии со способом прототипа, приводит к увеличению числа устанавливаемых считывателей до величины 7 и увеличивает технические проблемы в системе при использовании выносных антенн. На фиг.2 представлена схема помещения,разбитая на ячейки и фрагмент системы определения местоположения объекта с двумя считывателями С 1 и С 2. Под ячейкой подразумевается доля диаграммы направленности считывателя,которую желательно идентифицировать (определить ее координаты). Фрагмент системы определения местоположения объекта поясняет значение параметров, связанных с перекрытием диаграмм направленности считывателей. Видно, что при ширине диаграммы направленности Н 4 зона перекрытия считывателем С 2 диаграммы направленности считывателя С 1,включают 3 ячейки с номерами 2,3,4, т.е. величина перекрытия диаграммы направленности для считывателя С 1 равна значению В 3 (ячейки считывателя С 1, попадающие в зоны перекрытия считывателя С 2, отмечены двойными линиями). В прямоугольниках на фиг.2,которые моделируют ячейки,представлены номера считывателей, которые зафиксировали объект в данной ячейке. При нахождении объекта М,например, в ячейке 1 его фиксирует считыватель С 1(при этом считыватель выдает единичный сигнал), считыватель С 2 не фиксирует сигнал (при этом считыватель выдает нулевой сигнал) и ему номер не присваивается. Если объекты находятся в ячейках 2, 3, 4, то их фиксируют два считывателя С 1 и С 2. Номер старшего считывателя в ячейке обозначается буквойи его значение соответствует старшей цифре номеров считывателей. Таким образом, в ячейке 1 зафиксирован считыватель С 1 и значение , в ячейке 3 зафиксированы считыватель С 1 и С 2 и значение 2. Число считывателей,зафиксированных в данный момент времени в одной ячейке, обозначается буквой К. В ячейке 5 зафиксирован только один считыватель С 2, поэтому для этой ячейки значение К 1. Для ячейки 3 зафиксировано два считывателя С 1 и С 2, поэтому значение К 2. Число считывателей , в соответствии с предлагаемым способом, должно быть больше, чем 4 величина В. На фиг.2 число считывателей 2,а число зон перекрытия В 3, т.е. условие не выполняется, и нет возможности определить принадлежность объекта одной из ячеек 2, 3, 4 при таком количестве считывателей. При этом фиксируется зона увеличенной ширины, которая включает три ячейки. Пример. Способ определения координат положения подвижного объекта в закрытых помещениях реализуется следующим образом. Для помещения, например, размером 11 м 21 м составляют план помещения. Определяют необходимое количествосчитывателей и их параметры. При этом, предварительно задают величину ошибки определения координат объекта,например, Е 3 м. Принимают, что ячейка при заданной ошибке Е,принимает размеры,определяемые ошибкой и шириной помещения ,т.е. 3 м 11 м. Выбираютсчитыватели со встроенной антенной и идентификаторы (метки),обеспечивающие возможность считывания информации на расстоянии большем, чем 11 метров. Выбирают считыватель с частотой сигнала,например, 915 МГц и зоной считывания 13 м. Из паспорта для этого считывателя определяют ширину диаграммы направленности Н, пусть Н 1 рад. Определяют ширину диаграммы направленности антенны в метрах Нм 12 м (при 11). Определяют количество ячеек, размещаемых на диаграмме направленности одной антенны, из выражения Нм/Е 4.Число перекрытия ячеек В для обеспечения величины ошибки Е, не превышающей одной ячейки , определяют из выражения В Нм/Е)-13. Определяют необходимое число считывателей ,исходя из условия, что оно должно быть больше В. Принимают, что 14. Количество ячеек в помещении при 4 определяют из выражения 7. На фиг.3 представлена схема помещения с размерами 11 м 21 м. В системе координат плана помещения нанесена сетка, состоящая из ячеек. Установлено (4) четыре считывателя С 1,С 2, С 3, С 4 на конструкциях стены, имеющей размер 21. Параметры системы, определенные выше,учтены при размещении считывателей. В считыватели записывают их номера (1,2,3,4). В электронные идентификаторы (метки) записывают код подвижного объекта и закрепляют метку на объекте М. Считыватели соединены проводным или беспроводным каналом с ЭВМ. В составе каждого считывателя имеется контроллер соответствующего интерфейса, приемные контролеры интерфейса устанавливаются в ЭВМ. При перемещении объекта с идентификатором М по помещению он попадает под излучение считывателей, при условии, что идентификатор находится в пределах ширины диаграммы направленности антенны Н. При этом инициируется ответная посылка. Идентификатор посылает код подвижного объекта в считыватели. Считыватели пересылает этот код и номер своего положения в помещении по интерфейсу в ЭВМ. Информация обрабатывается, запоминается и отображается на мониторе совместно с планом помещения. Вычисление координат положения объекта в помещении выполняют в ЭВМ следующим образом. Пусть идентификатор М находится в одной из ячеек помещения при этом вариант 1- наличие сигнала М зафиксировали только три из четырех считывателей, а именно зафиксировали считыватели С 1,С 2,С 3- на основе этой информации в ЭВМ формируют пакет из цифр номеров считывателей в виде (1,2,3,0) и определяют старшую цифруэтого пакета, а именно 3- проводят сравнение величини , в данном случае равенство не выполняется,ответ отрицательный (дальнейшие вычисления по ветви 1)- проводят сравнение величиныи величины 1, данном случае равенство выполняется, ответ положительный- цифру номера ячейки , в которой находится идентификатор М, определяют из выражения -13,а именно номер ячейки 3. Этот результат зафиксирован на фиг.3 вариант 2- наличие сигнала М зафиксировали только два из четырех считывателей, а именно считыватели С 3,С 4- на основе этой информации в ЭВМ формируют пакет из цифр номеров считывателей в виде (0,0,3,4) и определяют старшую цифруэтого пакета, а именно 4- проводят сравнение величини , в данном случае равенство выполняется,ответ положительный (дальнейшие вычисления по ветви 2)- проводят сравнение величин К и , в данном случае равенство не выполняется,ответ отрицательный- проводят сравнение величин К и -1 ,в данном случае равенство не выполняется,ответ отрицательный- проводят сравнение величины К и величины 2, в данном случае равенство выполняется, ответ положительный- цифру номера ячейки , в которой находится идентификатор М, определяют из выражения 26, а именно номер ячейки 6. Этот результат зафиксирован на фиг.3. В случае, если при установке четырех считывателей на стенепомещения, размеры ячейки(3 м 11 м) не соответствуют предъявляемым требованиям в отношении величины , то необходимо дополнительно установить считыватели и на стенепомещения. Из примера видно, что по сравнению с прототипом, в помещении с одинаковыми размерами протяженной стены (21 м) для определения координат подвижного объекта число считывателей необходимо установить на 42,8 меньше и, кроме того, способ позволяет перейти от выносных антенн с размерами 1,32 м к встроенным в считыватель антеннам с размером 0,33 м. На фиг.4 представлена блок схема алгоритма определения координат объекта в закрытом помещении. Таким образом, повышение эффективности определения координат подвижного объекта в закрытых помещениях достигается за счет уменьшения числа устанавливаемых считывателей и устранения технических проблем при переходе от выносных антенн к встроенным в считыватель антеннам. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения координат положения подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей, согласно которому электронные идентификаторы закрепляют на подвижных объектах, считыватели закрепляют на элементах конструкции помещения,при приближении подвижного объекта к считывателю из его электронного идентификатора считывают код и вместе с кодом считывателя передают через контроллер локальной сети в ЭВМ, положение считывателей определяется сеткой, нанесенной на план помещения, коды считывателей и коды координат их положения запоминают в ЭВМ, в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения, отличающийся тем, что считыватели устанавливают с шагом между ними, обеспечивающим частичное перекрытие диаграммы направленности антенны соседнего считывателя, формируют пакет, в который включают цифры номеров считывателей С,зафиксировавших в данный момент времени идентификационный номер подвижного объекта,запоминают цифры номеров считывателей в пакете,определение координат ячейки, в которой зафиксирован подвижной объект, выполняют в ЭВМ на основе логических операций, с учетом общего количества установленных считывателей,ширины диаграммы направленности антенны Н,числа ячеек В перекрытия диаграммы первого считывателя соседним считывателем, цифры старшего номерасчитывателей в пакете, числа считывателей К, зафиксированных в пакете. 2. Способ по п.1, отличающийся тем, что в помещении устанавливают количество считывателейиз условия, чтодолжно быть больше числа зон перекрытия В на единицу. 3. Способ по п.п.1 и 2, отличающийся тем, что каждому считывателю Си ячейкампространства помещения присваивают порядковые номера,увеличивающиеся по отношению к соседнему считывателю,начиная с единицы.
МПК / Метки
Метки: подвижного, определения, закрытых, объекта, помещениях, способ, координат
Код ссылки
<a href="https://kz.patents.su/7-ip26941-sposob-opredeleniya-koordinat-podvizhnogo-obekta-v-zakrytyh-pomeshheniyah.html" rel="bookmark" title="База патентов Казахстана">Способ определения координат подвижного объекта в закрытых помещениях</a>
Система определения местоположения объекта
Номер предварительного патента: 6656
Опубликовано: 15.10.1998
Автор: Васильев Иван Вениаминович
МПК: G01S 5/04
Метки: определения, система, местоположения, объекта
Формула / Реферат:
Изобретение относится к радионавигации и может быть использовано для определения местоположения объектов, в том числе подвижных, например, наземного, водного или воздушного транспорта.Система содержит базовые станции Бс 1, Бс 2, Бс 3, и БС (главная) и размещенный на определяемом объекте передатчик, который снабжен устройствами, осуществляющими модуляцию сигнала передатчика кодом опознавания и специальным синхросигналом. Каждый приемник Бс...
Способ определения координат землетрясения
Номер предварительного патента: 4781
Опубликовано: 16.06.1997
Автор: Хайдаров Карим Аменович
МПК: G01V 1/00
Метки: координат, способ, землетрясения, определения
Формула / Реферат:
Изобретение относится к сейсмологии, в частности к технологии регистрации удаленных землетрясений.Техническим результатом является обеспечение измерения координат землетрясений наблюдением из единственной точки с большей точностью и скоростью.Это достигается тем, что при определении координат землетрясения из одной точки наблюдения используют разницу времен прихода сейсмических волн разного типа, например, Р и S-волн по годографу, поэтому по...
Сеть щелевой аспирации для обеспыливания подвижного объекта
Номер инновационного патента: 20674
Опубликовано: 15.01.2009
Авторы: Репп Константин Рудольфович, Коробов Алексей Константинович
МПК: B65G 21/00
Метки: обеспыливания, аспирации, подвижного, щелевой, объекта, сеть
Формула / Реферат:
Изобретение относится к системам для обеспыливания подвижных объектов и может быть использовано на зерновых элеваторах для аспирации разгрузочных тележек ленточных конвейеров надсилосных конвейеров.Устройство состоит из рабочих секций щелевых труб, между которыми смонтирована секция для отсоса воздуха также в виде щелевой трубы, щели, имеющейся в нижней части всех секций щелевой трубы по всей их длине, перекрываемую герметизирующими фартуками из...
Дифференциальный способ определения координат
Номер предварительного патента: 20140
Опубликовано: 15.10.2008
Авторы: Кальменов Тынысбек Шарипович, Проценко Владимир Александрович, Федулина Инна Николаевна, Васильев Иван Вениаминович, Маткаримов Бахыт Турганбаевич, Хачикян Владислав Саркисович, Некрасов Александр Аркадьевич, Имандосова Маргарита Булатовна, Глухих Александр Вениаминович, Байжанов Бектур Сембиулы, Иванов Андрей Александрович
МПК: G01S 5/02
Метки: дифференциальный, определения, способ, координат
Формула / Реферат:
Изобретение относится к области радио-техники, в частности к радионавигационным способам определения, и может быть использовано для определения с повышенной точностью место-положения аппаратуры потребителей, использую-щих режим дифференциальных поправок.Технический результат, получаемый при исполь-зовании изобретения - упрощение реализуемого способом алгоритма обработки сигналов и, как следствие - значительное снижение стоимости пользовательских...
Устройство для обеспыливания подвижного объекта
Номер предварительного патента: 13883
Опубликовано: 15.01.2004
Автор: Коробов Алексей Константинович
МПК: B08B 15/00, E21F 5/00, B65G 69/16...
Метки: обеспыливания, устройство, подвижного, объекта
Формула / Реферат:
Изобретение относится к аспирационной технике, а именно к обеспыливанию подвижных объектов, и может быть использовано в горной, пищевой промышленности, в частности, на элеваторах для обеспыливания разгрузочных тележек надсилосных ленточных конвейеров. Устройство для обеспыливания подвижного объекта включает щелевую трубу с фартуками, огибающими челнок, смонтированный на объекте обеспыливания, с установкой на противоположных торцах челнока...
Предыдущий патент: Фазозадающее устройство для геоэлектроразведки
Следующий патент: Гибкое запорно-пломбировочное устройство “Универсал-1М” (варианты)
Случайный патент: Способ изготовления цельного каркаса со способностью сопротивления на внешние воздействия