Вертолёт, например мускулолёт
Формула / Реферат
Изобретение относится к технике летательных аппаратов, выполненных по вертолётной схеме, в частности к мускулолётам, у которых подъёмная сила возникает при вращении несущего ротора с его аэродинамическими крыльями.
Задачей изобретения является разработка вертолета в частности, мускулолёта, у которого вращение несущего ротора осуществляется более экономично, чем у известных аналогов, за счет импульсного приложения крутящего момента к крыльям ротора.
Это достигается тем, что в прелагаемом аппарате для вращения крыльев ротора применён принцип «махолёта», когда энергия от двигателя аппарата (от пилота, т. есть его ног) подводится к приводу для машущих движений крыльями импульсно, перио-дически, а горизонтальная «тянущая» составляющая подъёмной силы, появляющаяся при этом на машущих крыльях, обеспечивает возникновение крутящего момента на роторе летательного аппарата.
Текст
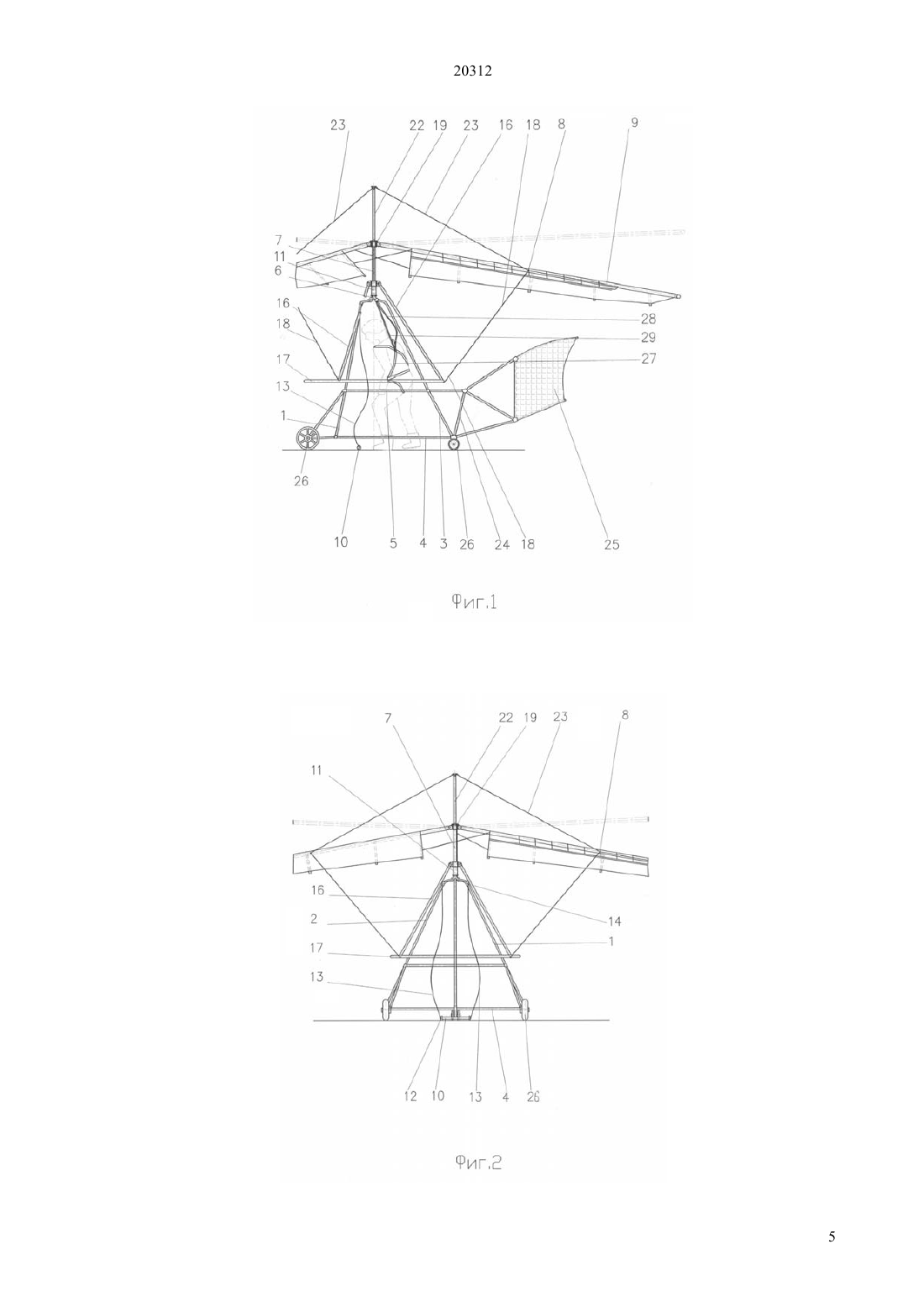
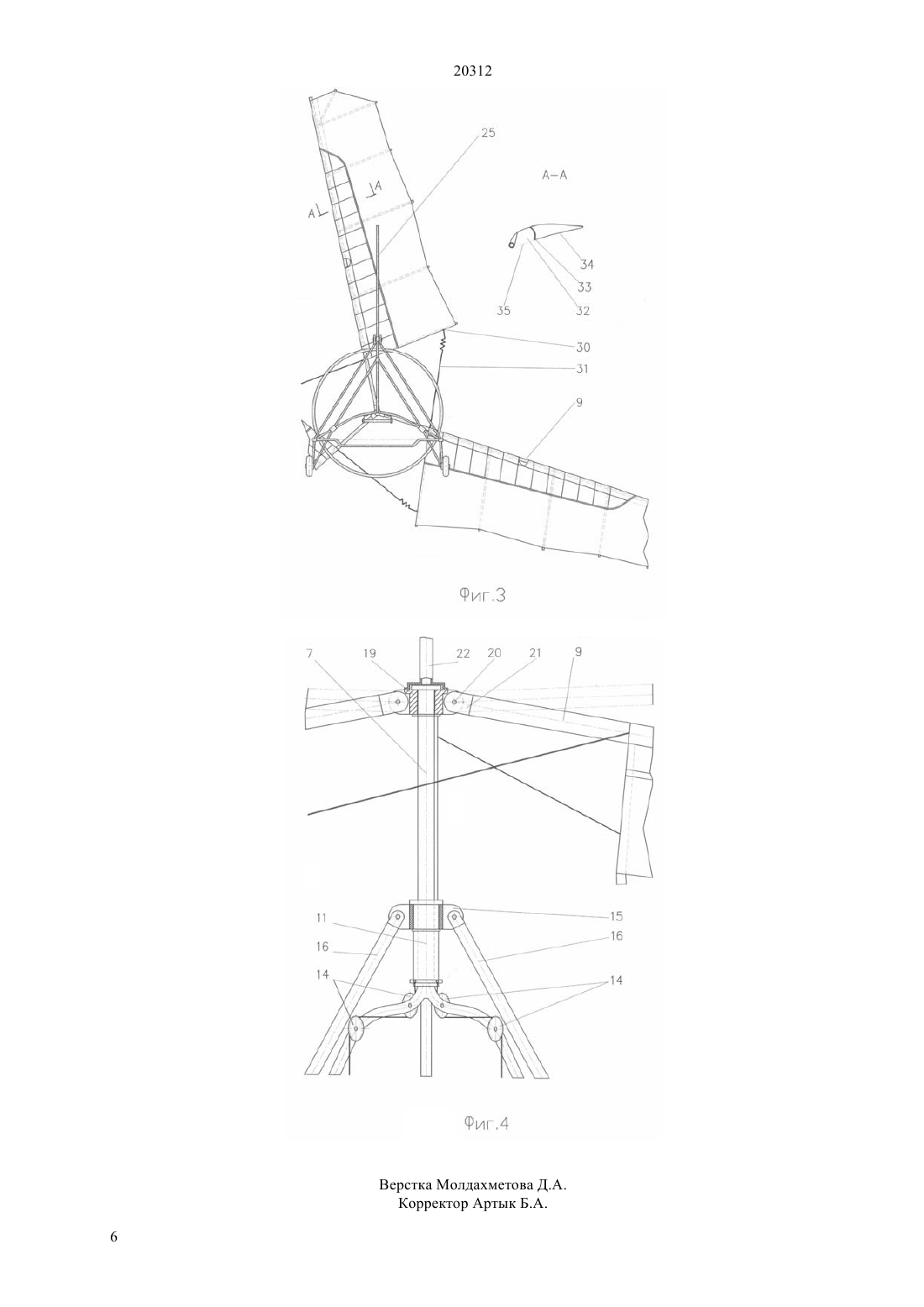
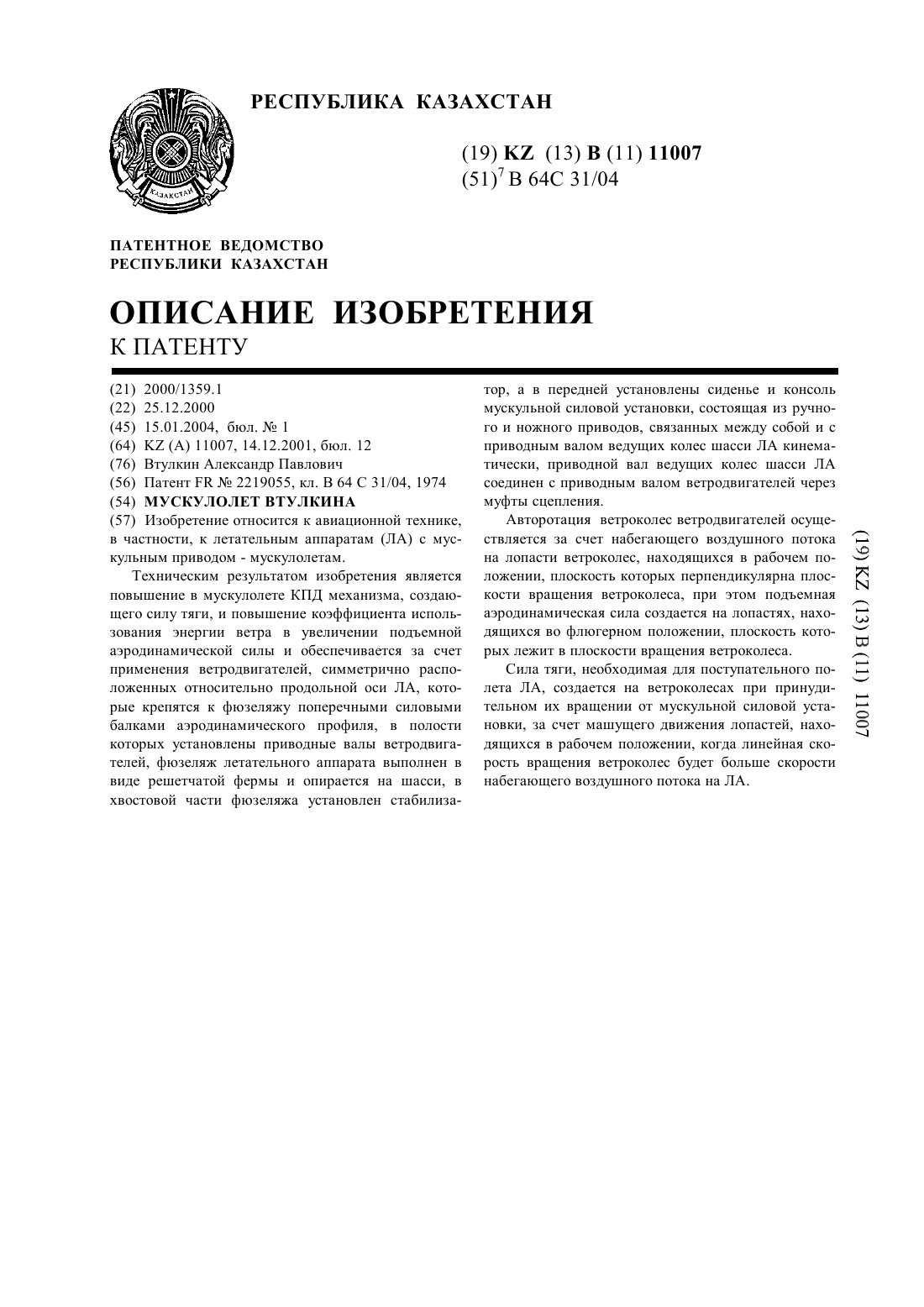
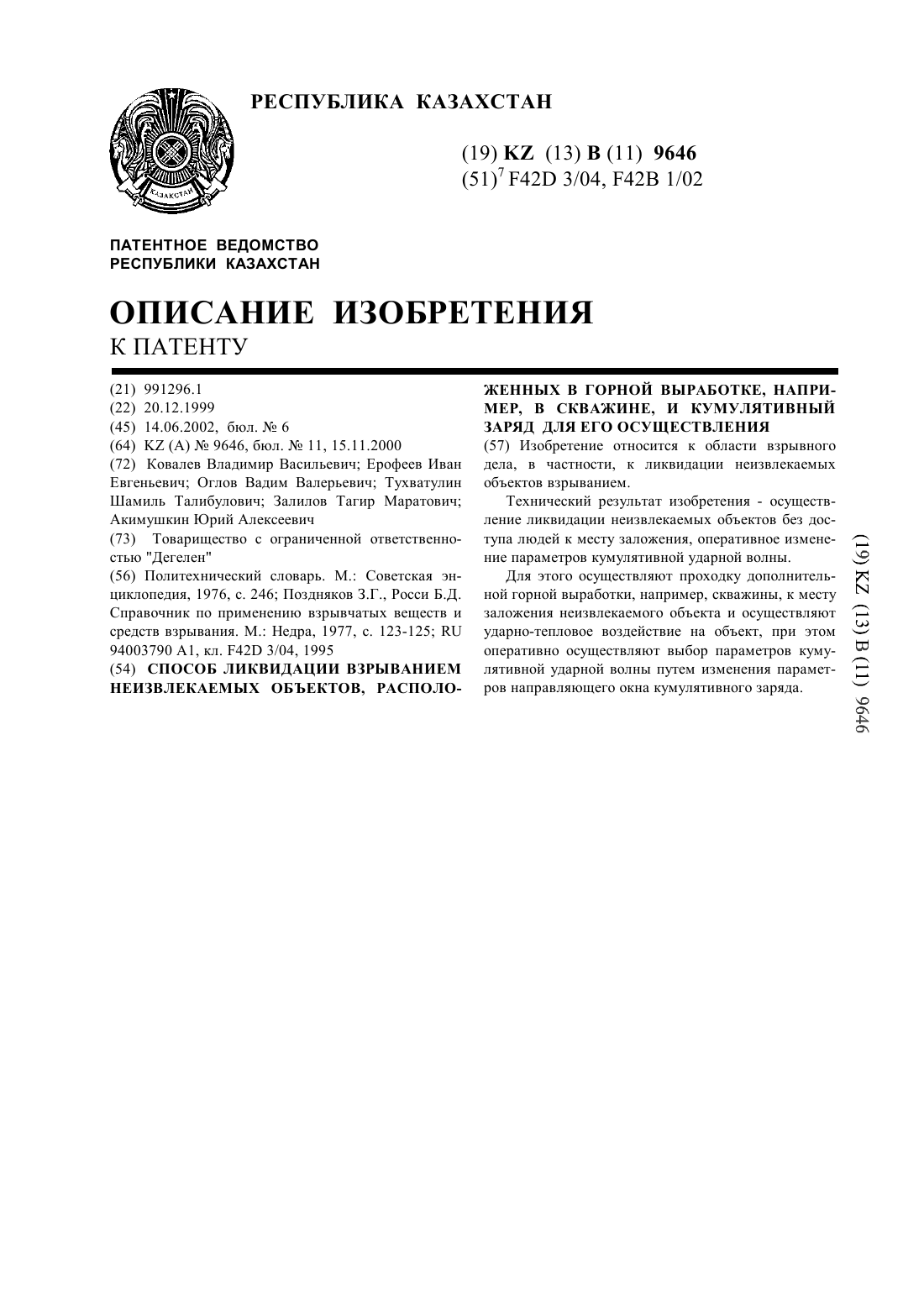
(51 64 31/04 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ импульсного приложения крутящего момента к крыльям ротора. Это достигается тем, что в прелагаемом аппарате для вращения крыльев ротора применн принцип махолта, когда энергия от двигателя аппарата (от пилота, т. есть его ног) подводится к приводу для машущих движений крыльями импульсно, периодически, а горизонтальная тянущая составляющая подъмной силы, появляющаяся при этом на машущих крыльях, обеспечивает возникновение крутящего момента на роторе летательного аппарата.(57) Изобретение относится к технике летательных аппаратов, выполненных по вертолтной схеме, в частности к мускулолтам, у которых подъмная сила возникает при вращении несущего ротора с его аэродинамическими крыльями. Задачей изобретения является разработка вертолета в частности, мускулолта, у которого вращение несущего ротора осуществляется более экономично, чем у известных аналогов, за счет 20312 Изобретение относится к технике летательных аппаратов, в частности к технике мускулолтов,конструкция которых основана на вертолтной схеме. Из патентной литературы известны такие летательные аппараты, в том числе мускулолты, у которых имеются вращающиеся несущие плоскости. Например, согласно патенту 1804413 3 В 64 С 31/04, В 64 В 1/32 Летательный аппарат с мускульным приводом, содержит два соосных винта противоположного вращения и педальный привод с цепной передачей. В патенте России 2093423 С 1 6 В 64 С 31/04 Мускулолт г. Лаврушкина В.Г. запатентовал мускулолт, который содержит движитель в виде двух соосных роторов противоположного вращения,передаточное устройство, состоящее из электродвигателя и электрогенератора, на котором закреплены педали. Известен также мускулолт по предварительному патенту КазахстанаА 112008 В 64 С 31 /04 Мускулолт Втулкина - 2. Аналогичен привод в Аэрогидродинамическом роторе Дьяченко по заявке 95102528 А 1 6 В 64 С 27/00. К недостаткам известных летательных аппаратов вертолтной схемы, в частности мускулолтов,относится то, что в них заложен принцип стационарной, монотонной работы привода для практически постоянной скорости вращения несущего ротора, а в мускулолтном варианте,например,посредством педального привода вращения несущего ротора. Известен также по патенту 2 253 595 С 2 В 64 С 31/04, 27/10, В 64 В 1/38, 2005 г Мускулолт Горшковой, в котором движитель вертикальной ориентации сконструирован как геликоптер с двумя винтами со встречным вращением, имеющий привод винтов рычажный храповой раздельный для правой и левой рук . Недостаткам этого мускулолта является монотонность мускульной работы пилота, в данном случае руками. Задачей изобретения является разработка такого летательного аппарата вертолтной схемы, в частности мускулолта, в котором привод от двигателя летательного аппарата к его ротору передавал бы момент вращения динамично,импульсно, например, когда пилот мускулолта работал бы на нм одновременно двумя ногами отдельными импульсными воздействиями на привод, толчками, аналогично как при прыжках на батуте. Это достигается тем, что в основу предлагаемого летательного аппарата положен принцип вращения несущего ротора не путм передачи на него крутящего момента, а за счет самостоятельного полта его несущих плоскостей (крыльев) вокруг оси их вращения, возникающего при машущих движениях этими крыльями, т. есть по принципу махолта, несущие плоскости (крылья) которого выполнены в виде упругого крыла, например подобного мягкому крылу дельтаплана. Такое крыло может, при импульсном махе, изменяя крутку крыла вдоль своей длины в сторону уменьшения угла 2 атаки, создавать значительное тянущее усилие в плоскости вращения несущего ротора. Технический результат в варианте мускулолта обеспечивается легким пространственным корпусом летательного аппарата, выполненным из облегченных элементов,например дюралюминиевых трубок, в основу которого положена тренога, опорные концы трубок которой соединены между собой также легкими трубками, что необходимо для устойчивости аппарата на земле,перед и во время старта, а также для размещения внутри треноги пилота, связанного с корпусом аппарата фалом и парашютной подвесной системой. Верх корпуса (треноги) оснащен вертикальной направляющей, например в виде трубы, размер длины которой обусловлен как величиной амплитуды середины машущего крыла при махе,которая для мускулолта равна высоте подножки, на которую уверенно может запрыгнуть пилот (350-400 мм), так и длиной скользящей втулки, выполненной,например, со скользящей шпонкой, и размещенной подвижно только в осевом направлении на этой трубе, причем на этой скользящей втулке, в свою очередь, подвижно только во вращательном направлении, например через подшипники качения,радиальные и упорные, размещена вращающаяся втулка-крестовина, на внешней стороне которой выполнены проушины для присоединения толкателей,вторыми концами которые присоединены к кольцу, частично по высоте охватывающему корпус-треногу и связывающему в единое целое эти толкатели и их втулку-крестовину,причем в местах присоединения толкателей к кольцу ещ присоединены тяги, например гибкие тросовые, вторыми концами которые присоединены к несущим элементам (консолям) крыльев в районе середины их длины. На верхнем конце направляющей трубы через,например, радиальные и упорные подшипники,размещена, подвижно только для вращения, верхняя несущая втулка - крестовина, например с тремя парами проушин, с помощью которых шарнирно, с горизонтальными осями, присоединены комли консолей, например трех несущих плоскостей(крыльев), которые выполнены, например для мускулолта, аналогично крыльям дельтаплана упругими, у которых крутка при увеличении давления набегающего потока воздуха при махе может плавно меняться от комля к концу крыла в сторону уменьшения угла атаки и на нижней обшивке крыла выполнен карман-канал повышенного давления, а импульсный привод от двигателя (от ног пилота) осуществляется,например, через гибкие тяги с подножкой, которые присоединены к скользящей втулке, причем эти тяги проходят через систему обводящих роликов,смонтированных на трубках корпуса-треноги для устранения контакта этих тяг с пилотом. Верхняя несущая втулка-крестовина дополнительно оснащена мачтой, на вершине которой закреплены верхние гибкие растяжки, вторыми концами присоединенные к консолям крыльев в 20312 местах присоединения упомянутых нижних тяг от толкателей, причм длины этих верхних и нижних растяжек-тяг определяют нижний (со значительным отрицательным ) и верхний, с незначительным,например, положительным , пределы махания несущих плоскостей (крыльев). Корпус аппарата оснащн дополнительно хвостовым вертикальным килем для компенсации при полте влияния крутящего момента на корпусе,возникающего из-за трения в подшипниках обеих втулок-крестовин, выполненном в мускулолте в виде трубчатой пространственной конструкции,смонтированной на задней ноге треноги корпуса ниже нижнего положения кольца толкателей,причм ноги треноги оснащены колесами для пробежки при посадке или взлте посамолтному. На фиг. 1 показан общий вид сбоку вертолтамускулолта. На фиг. 2 - то же, вид спереди. На фиг. 3 - то же, вид снизу. На фиг. 4 показан в увеличенном масштабе узел скользящей втулки. Предлагаемый вертолт в варианте мускулолта состоит из корпуса, выполненного из трубок 1, 2, 3 в виде треноги, опорные концы которых соединены между собой такими же легкими трубками 4 внизу,по их середине, между трубками 1 и 3, и 2 и 3, трубками 5. Причм верх корпуса-треноги оснащен,кроме места присоединения пилота 6, вертикальной направляющей, например в виде трубы 7, размер длины которой обусловлен как величиной амплитуды середины 8 машущей консоли (крыла) 9 при махе, т. есть высотой расположения подножки 10, на которую уверенно может запрыгнуть пилот,так и длиной скользящей втулки 11, выполненной,например, со скользящей шпонкой и размещнной на направляющей 7 со свободой продольного перемещения. Подножка 10, выполненная в виде, например трубки с боковыми шайбами-колсами 12, связана двумя гибкими тягами 13 (тянущие троса) с втулкой 11, причем эти тяги проходят через систему обводящих роликов 14, смонтированных на трубках корпуса 1 и 2 для устранения контакта тяг с телом пилота (фиг 4). На скользящей втулке 11 подвижно только во вращательном направлении, например через подшипники качения, радиальные и упорные,размещена вращающаяся втулка-крестовина 15, на внешней стороне которой выполнены проушины для присоединения толкателей 16. Толкатели 16 вторыми концами присоединены к кольцу 17, где ещ присоединены нижние тяги 18,вторыми концами которые присоединены к несущим элементам крыльев (консолям) в районе середины 8 их длины. На верхнем конце направляющей 7, с возможностью только вращаться, через радиальные - и упорные подшипники, размещена верхняя несущая втулка - крестовина 19, например с тремя парами проушин, через которые шарнирно, с горизонтальными осями 20, присоединены комли 21(крыльев). На несущей втулке-крестовине 19 смонтирована мачта 22 аппарата, на вершине которой закреплены верхние растяжки 23, а на задней ноге 3 треноги смонтирован хвост 24 с вертикальным килем 25. Кроме того, нижние концы трубок 1, 2 и 3 оснащены колсами 26. Пилот вертолта оснащн подвесной системой 27, которая ограничительным фалом 28 и упругим фалом 29 присоединяется к корпусу-треноге в е вершине в месте 6. У крыльев (фиг.3), корневые латы 30 упругими стяжками 31 связаны с соседними консолями, и на их нижней обшивке выполнены карманы 32 повышенного давления (А-А фиг.3) с своей передней кромкой 33 оставшейся нижней обшивки 34, которая фиксируется в своем положении оттяжками 35, соединением с верхней обшивкой крыла на его консоли 9 . Работает предлагаемый вертолт-мускулолт следующим образом. Пилот подходит к стоящему на земле аппарату, у которого крылья 9 и,следовательно, кольцо 17 толкателей 16 вместе со скользящей втулкой 11 находятся в крайнем нижнем положении, ограниченном мачтой 22 и верхними растяжками 23. При этом нижние тяги 18 провисают, а подножка 10 со своими шайбами 12 лежит на земле. Затем он размещается внутри треноги-кабины и присоединяет свою подвесную систему 27 через фал 28 (и 29) к корпусу в месте крепления 6. После этого пилот начинает раскрутку ротора, плавно приподнимая и резко опуская аппарат несколько раз подряд, пока крылья не полетят, раскручивая ротор. Это произойдет из-за то, что концы крыльев, при резком опускании аппарата, увеличивают крутку крыльев и на них возникает подъмная сила со значительной горизонтальной составляющей. После того, как крылья 9 займут верхнее положение относительно корпуса, вращаясь,верхнее положение займт и подножка 10,приподнявшись над землй. После этого, не теряя времени, пилот, подпрыгивая толчком от земли и сгибая ноги в коленях, ставит стопы на подножку и,резко распрямляя колени, толкает подножку вниз,тем самым, через тяги 13, скользящую втулку 11,втулку-крестовину 15, толкатели 16 с кольцом 17 и нижние тяги 18, резко толкает вниз середины 8 крыльев 9, что приводит к дальнейшему увеличению скорости полта, этих крыльев по кругу, с последующим более интенсивным стремлением крыльев занять верхнее положение, изза чего возникает эффект подкидывания пилота через распрямлнные в коленях ноги, как при прыжках на батуте. При дальнейших толчках скорость вращения несущих плоскостей (крыльев) будет увеличиваться,что приведт к преодолению усилия вниз от этих толчков на верхнюю несущую втулку-крестовину 19(часть усилия толчка) суммарной во времени подъмной силой вверх несущих крыльев 9. Это приведет к началу подъма мускулолта с пилотом 3 20312 вверх, когда пилот, в основном, контактирует только с подножкой аппарата, т. есть как бы с батутом, который постепенно поднимается вверх. При отрыве мускулолта от земли он развернтся носом против ветра из-за хвоста 24 и киля 25. Для горизонтального полта пилот наклоняет вперд аппарат, смещая сво тело упором рук в трубки 1 и 2 корпуса с дополнительной компенсацией самовозникающего наклона аппарата из-за горизонтальной скорости его обдува. Наклонами в разные стороны могут осуществляться повороты мускулолта, даже с выводом его на полт по попутному ветру, с последующей посадкой без горизонтальной скорости в режиме автожира,полного или частичного. Таким образом,предлагаемый вертолт позволит, в варианте мускулолта, осуществлять реальные полты с ограниченных площадок,например в сельской местности, а в моторном варианте - создавать более экономичные и безопасные воздушные суда принципиально нового класса. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Вертолт, например, мускулолт, содержащий корпус, смонтированную в верхней его части по центру тяжести с возможностью вращения через посредство радиальных и упорных подшипников втулку - крестовину с соответствующим числом проушин, к которым, например, шарнирно присоединены несущие плоскости - крылья, и привод их вращения, например, мускульный,отличающийся тем, что, корпус выполнен в виде вертикальной треноги из, например, облегченных труб, на вершине которой смонтирована, в основном вертикально, направляющая ограниченной длины,например, в виде трубы со скользящей шпонкой, на верхнем конце которой смонтирована с возможностью вращения указанная втулка 4 крестовина, на верхнем торце которой смонтирована мачта ограниченной длины, и на шарнирах которой смонтированы комли несущих консолей крыльев,упругих по углу крутки вдоль длины, а на направляющей подвижно в осевом направлении смонтирована скользящая втулка меньшей длины,чем длина направляющей на величину амплитуды маха, причем на скользящей втулке, подвижно во вращательном направлении через посредство радиальных и упорных подшипников смонтирована крестовина, в соответствующих проушинах которой смонтированы наклонные толкатели, вторыми концами присоединенные к кольцу, при этом в местах присоединения толкателей к кольцу присоединены тяги, например, гибкие, тросовые,вторыми концами присоединенные к несущим консолям крыльев в середине их длины, а на вершине мачты закреплены, например, тросовые растяжки, вторые концы которых присоединены,например, в местах присоединения тяг, к несущим консолям крыльев, причем длины этих верхних и нижних растяжек соответствуют нижнему, со значительной отрицательной - образностью, и верхнему,с незначительной,например,положительной - образностью, положению крыльев, причем импульсный привод от двигателя ног пилота включает, например, гибкие тяги со ступенькой, пропущенные через систему обводящих роликов, смонтированных на трубках корпуса. 2. Вертолт, например, мускулолт по п.1,отличающийся тем, что крылья выполнены с аэродинамическим профилем,на нижней поверхности каждого крыла, на одной трети - одной пятой ширины профиля от его передней кромки,выполнен карман- канал повышенного давления по основной длине крыла.
МПК / Метки
МПК: B64C 31/04
Метки: вертолёт, например, мускулолёт
Код ссылки
<a href="https://kz.patents.su/6-ip20312-vertolyot-naprimer-muskulolyot.html" rel="bookmark" title="База патентов Казахстана">Вертолёт, например мускулолёт</a>
Мускулолет Втулкина
Номер патента: 11007
Опубликовано: 15.01.2004
Автор: Втулкин Александр Павлович
МПК: B64C 31/04
Метки: втулкина, мускулолет
Формула / Реферат:
Изобретение относится к авиационной технике, в частности, к летательным аппаратам с мускульным приводом - мускулолетом.Летательный аппарат с мускульным приводом использует способ полета летательного аппарата, основанный на применении ветродвигателей, симметрично расположенных относительно продольной оси ЛА, которые крепятся к фюзеляжу поперечными силовыми балками аэродинамического профиля, в полости которых установлены приводные валы...
Мускулолет Втулкина-2

Номер патента: 11008
Опубликовано: 15.01.2004
Автор: Втулкин Александр Павлович
МПК: B64C 31/04
Метки: мускулолет, втулкина-2
Формула / Реферат:
Изобретение относится к авиационной технике, в частности, к летательным аппаратам (ЛА) с мускульным приводом - мускулолетам.Летательный аппарат с мускульным приводом использует способ полета ЛА, основанный на применении ветродвигателя с соосной конструктивной схемой расположения лопастных ветроколес, который установлен над фюзеляжем и крепится с ним полуосью вращения нижнего ветроколеса, которая установлена в подшипниках несущей оси,...
Устройство для разделения материалов по плотности в воде, например дробленого аккумуляторного лома

Номер патента: 849
Опубликовано: 15.06.1994
Авторы: Фролов Юрий Иванович, Элькинд Евгений Игоревич, Чебыкин Сергей Петрович, Гущин Юрий Анатольевич
МПК: B03B 5/56
Метки: материалов, разделения, устройство, лома, воде, например, плотности, дробленого, аккумуляторного
Формула / Реферат:
Изобретение относится к устройствам для разделения материалов по плотности в воде и может быть использовано, в частности, в цветной металлургии при переработке лома свинцовых автотракторных аккумуляторов. Цель изобретения - повышение качества разделения и производительности устройства. На опорных роликах 2, связанных с механизмом вращения 3, с уклоном в сторону разгрузочного конца установлен цилиндрический корпус (К) 1, к внутренним стенкам...
Способ ликвидации взрыванием неизвлекаемых объектов, расположенных в горной выработке, например в скважине, и кумулятивный заряд для его осуществления
Номер патента: 9646
Опубликовано: 14.06.2002
Авторы: Акимушкин Юрий Алексеевич, Ерофеев Иван Евгеньевич, Тухватулин Шамиль Талибулович, Залилов Тагир Маратович, Ковалев Владимир Васильевич, Оглов Вадим Валерьевич
Метки: горной, взрыванием, объектов, расположенных, заряд, ликвидации, осуществления, способ, выработке, кумулятивный, например, неизвлекаемых, скважине
Формула / Реферат:
Изобретение относится к области взрывного дела, в частности, к ликвидации неизвлекаемых объектов взрыванием.Технический результат изобретения - осуществление ликвидации неизвлекаемых объектов без доступа людей к месту заложения, оперативное изменение параметров кумулятивной ударной волны.Для этого осуществляют проходку дополнительной горной выработки, например, скважины, к месту заложения неизвлекаемого объекта и осуществляют ударно-тепловое...
Вибрационное загрузочное устройство для транспортирования круглых тел, например, шариков, коротких цилиндров, роликов
Номер предварительного патента: 15144
Опубликовано: 15.12.2004
Автор: Гаипов Бахытжан
МПК: B23Q 7/00
Метки: роликов, устройство, коротких, загрузочное, транспортирования, вибрационное, круглых, шариков, цилиндров, например, тел
Формула / Реферат:
Изобретение относится к области транспортировки круглых тел (шариков, коротких цилиндров,роликов и др.) и может быть использовано в машиностроении, например в подшипниковойпромышленности при изготовлении шариков,роликов и сборке ролико- и шарикоподшипников, атакже в других отраслях народного хозяйства длятранспортировки таких деталей.Предлагаемое устройство повышает производительность вибрационных загрузочных устройствпутем обеспечения надежного...
Предыдущий патент: Устройство для измельчения
Следующий патент: Устройство для обеспыливания головки нории и бункера, загруженного этой норией, и сброса давления в случае возникновения взрыва в них
Случайный патент: Способ Дагиса восстановления шеек валов