Мускулолет Втулкина
Формула / Реферат
Изобретение относится к авиационной технике, в частности, к летательным аппаратам с мускульным приводом - мускулолетом.
Летательный аппарат с мускульным приводом использует способ полета летательного аппарата, основанный на применении ветродвигателей, симметрично расположенных относительно продольной оси ЛА, которые крепятся к фюзеляжу поперечными силовыми балками аэродинамического профиля, в полости которых установлены приводные валы ветродвигателей, фюзеляж летательного аппарата выполнен в виде решетчатой фермы и опирается на шасси, в хвостовой части фюзеляжа установлен стабилизатор, а в передней установлены сиденье и консоль мускульной силовой установки, состоящая из ручного и ножного приводов, связанных между собой и с приводным валом ведущих колес шасси ЛА кинематически, приводной вал ведущих колес шасси ЛА соединен с приводным валом ветродвигателей через муфты сцепления.
Предлагаемая конструктивная схема мускулолета имеет сходство и с вертолетом, и с автожиром, но это ни то, ни другое, а является новым техническим решением применения способа полета ЛА с эффективным использованием энергии ветра в увеличении подъемной силы.
Текст
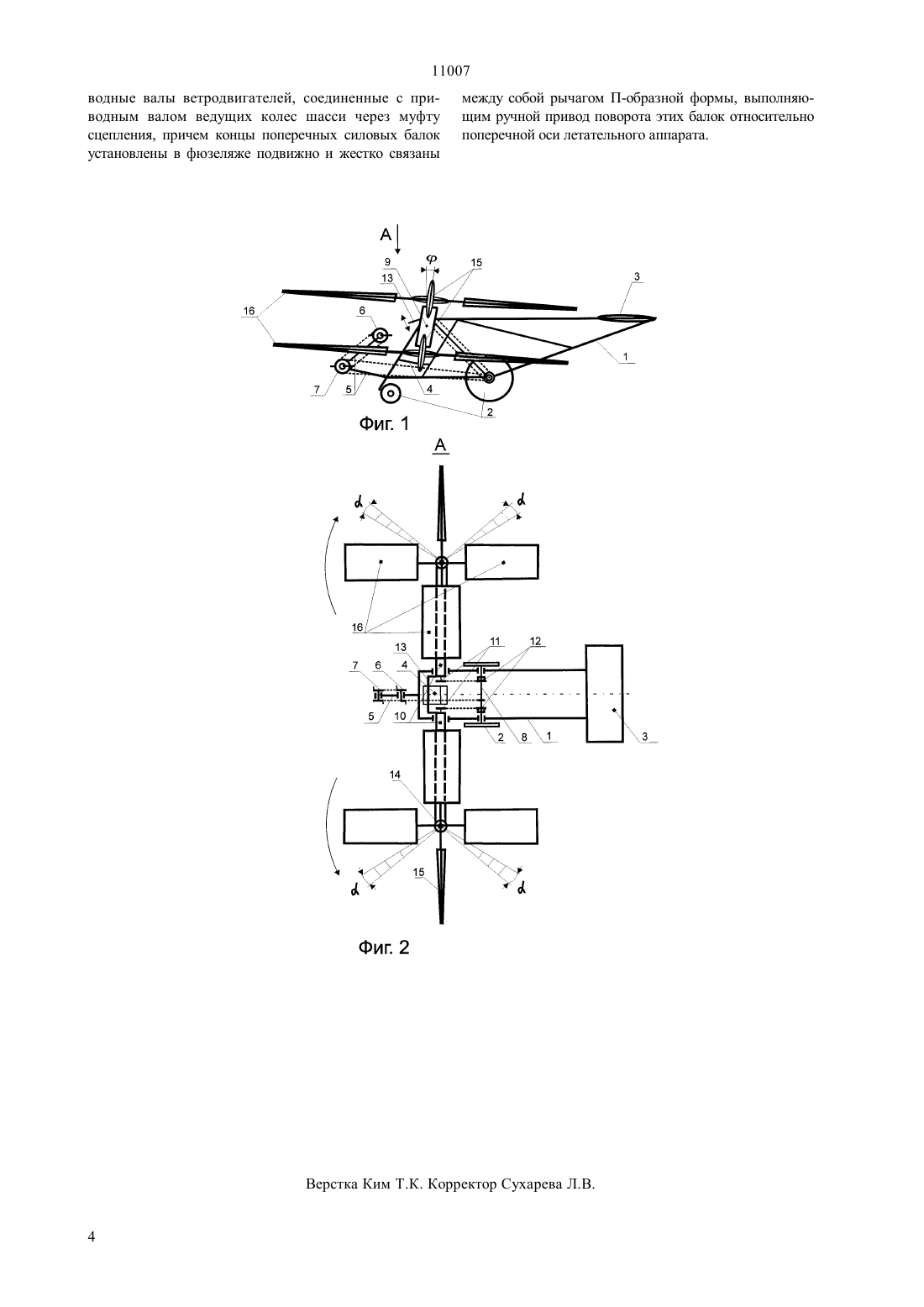
(51)764 31/04 ПАТЕНТНОЕ ВЕДОМСТВО РЕСПУБЛИКИ КАЗАХСТАН(57) Изобретение относится к авиационной технике,в частности, к летательным аппаратам (ЛА) с мускульным приводом - мускулолетам. Техническим результатом изобретения является повышение в мускулолете КПД механизма, создающего силу тяги, и повышение коэффициента использования энергии ветра в увеличении подъемной аэродинамической силы и обеспечивается за счет применения ветродвигателей, симметрично расположенных относительно продольной оси ЛА, которые крепятся к фюзеляжу поперечными силовыми балками аэродинамического профиля, в полости которых установлены приводные валы ветродвигателей, фюзеляж летательного аппарата выполнен в виде решетчатой фермы и опирается на шасси, в хвостовой части фюзеляжа установлен стабилиза тор, а в передней установлены сиденье и консоль мускульной силовой установки, состоящая из ручного и ножного приводов, связанных между собой и с приводным валом ведущих колес шасси ЛА кинематически, приводной вал ведущих колес шасси ЛА соединен с приводным валом ветродвигателей через муфты сцепления. Авторотация ветроколес ветродвигателей осуществляется за счет набегающего воздушного потока на лопасти ветроколес, находящихся в рабочем положении, плоскость которых перпендикулярна плоскости вращения ветроколеса, при этом подъемная аэродинамическая сила создается на лопастях, находящихся во флюгерном положении, плоскость которых лежит в плоскости вращения ветроколеса. Сила тяги, необходимая для поступательного полета ЛА, создается на ветроколесах при принудительном их вращении от мускульной силовой установки, за счет машущего движения лопастей, находящихся в рабочем положении, когда линейная скорость вращения ветроколес будет больше скорости набегающего воздушного потока на ЛА. 11007 Изобретение относится к авиационной технике, в частности, к летательным аппаратам (ЛА) с мускульным приводом - мускулолетам. Известен способ полета летательного аппарата(предварительный патент Казахстана 10532 от 04.05.2000, В 64 С 23/00. Способ полета летательного аппарата // Опубликован в бюллетене Промышленная собственность Казахстана, 2001,8), заключающийся в создании подъемной аэродинамической силы от набегающего потока воздуха и силы тяги, создаваемой тянущим винтом, приводимым во вращение силовой установкой, в котором для создания подъемной аэродинамической силы применяют ветродвигатели (патент Казахстана 8440 от 06.10.98,037/02. Ветродвигатель // Опубликован в бюллетене Промышленная собственность Казахстана, 2001,1), плоскостям вращения лопастей ветроколес которых придают положительный угол атаки относительно набегающего потока воздуха, обеспечивая вращение лопастей ветроколес свободно набегающим потоком воздуха - режим авторотации, или лопасти ветроколес вращают принудительно от силовой установки в том же направлении,что и при авторотации, причем положение лопастей ветродвигателя изменяют таким образом, что в рабочем положении они выполняют функцию лопастьтянущий винт, а во флюгерном положении выполняют функцию лопасть-динамическое крыло, однако летательного аппарата, использующего этот способ полета, нет. Известен мускулолет (патент 2219055, кл. В 64 С 31/04, 1974, прототип), включающий паруса,состоящие из двух щитов, соединенных один с другим вдоль верхней балки, паруса соединены с рамой,образующей фюзеляж мускулолета, два конца верхней балки соединены тросом, прикрепленным к рычагу управления, установленного на раме, рама опирается на шасси, состоящее из двух передних ведущих колес и заднего колеса, передние ведущие колеса соединены между собой приводным валом, центральная часть которого образует две противоположные рукоятки, выполняющие функции ножного привода, приводной вал соединен цепью с двумя рукоятками, выполняющими функции ручного привода, в передней части фюзеляжа установлено сиденье, а в хвостовой установлен киль и стабилизатор,выполняющие функции руля управления и руля глубины, лопасти вставлены внутри передних ведущих колес, сверху которых установлены заслонки, выполненные в виде полуцилиндров и прикрепленных к раме. Одним из основных недостатков этого мускулолета является, во-первых, малый КПД механизма, создающего силу тяги в ЛА, и большое его лобовое сопротивление, во-вторых, неэффективное использование энергии ветра в увеличении подъемной аэродинамической силы. Техническим результатом изобретения является повышение в мускулолете КПД механизма, создающего силу тяги, и повышение коэффициента исполь 2 зования энергии ветра в увеличении подъемной аэродинамической силы. Сущность изобретения заключается в том, что в известном мускулолете, содержащем фюзеляж, опирающийся на шасси, включающее два ведущих колеса, соединенных между собой приводным валом,приводной вал соединен цепью с двумя рукоятками,выполняющими функции ручного привода, ножной привод выполнен в виде двух противоположных рукояток, в хвостовой части фюзеляжа установлен стабилизатор, а в передней - установлены сиденье и консоль мускульной силовой установки, включающая ручной и ножной приводы, кинематически связанные между собой и с приводным валом ведущих колес, два ветродвигателя, симметрично расположенные относительно продольной оси летательного аппарата, прикрепленные к фюзеляжу поперечными силовыми балками аэродинамического профиля, в полости которых установлены приводные валы ветродвигателей, соединенные с приводным валом ведущих колес шасси через муфту сцепления, причем концы поперечных силовых балок установлены в фюзеляже подвижно и жестко связаны между собой рычагом П-образной формы, выполняющим ручной привод поворота этих балок относительно поперечной оси летательного аппарата. На фиг. 1 представлена конструктивная схема мускулолета в горизонтальном полете, вид сбоку, на фиг. 2 - то же, вид спереди со стороны крепления ветродвигателя к фюзеляжу, на фиг. 3 - вид сверху. Летательный аппарат с мускульным приводом содержит фюзеляж 1, выполненный в виде решетчатой фермы и опирающийся на шасси 2, в хвостовой части фюзеляжа 1 установлен стабилизатор 3, а в передней установлены сиденье 4 и консоль 5 мускульной силовой установки, состоящая из ручного 6 и ножного 7 приводов, связанных между собой и с приводным валом 8 ведущих колес шасси 2 летательного аппарата кинематически, два ветродвигателя 9, симметрично расположенные относительно продольной оси летательного аппарата, крепятся к фюзеляжу 1 поперечными силовыми балками 10 аэродинамического профиля, в полости которых установлены приводные валы 11 ветродвигателей,соединенных с приводным валом 8 ведущих колес шасси 2 через муфты сцепления 12, причем концы поперечных силовых балок 10 установлены в фюзеляже 1 подвижно и связаны между собой жестко рычагом 13 П-образной формы, выполняющим ручной привод поворота этих балок 10 относительно поперечной оси летательного аппарата на угол . Взлет летательного аппарата с мускульным приводом осуществляется следующим образом. Пилот,учитывая скорость набегающего потока воздуха на ЛА, устанавливает рычагом 13 (выполняющим ручной привод поворота поперечных силовых балок 10 относительно поперечной оси ЛА) соответствующий положительный угол атакиплоскостям вращения ветроколес 14 относительно направления набегающего потока воздуха, а также отключает муфтами 11007 сцепления 12 приводной вал 8 ведущих колес шасси 2 летательного аппарата от приводных валов 11 ветродвигателей 9. Затем выполняется разбег летательного аппарата за счет вращения пилотом, находящимся на сиденье 4, педалей ручного 6 и ножного 7 приводов, которые связаны между собой и с приводным валом 8 ведущих колес шасси 2 кинематически. При этом ветродвигатели 9 находятся в режиме авторотации, при котором соосные ветроколеса 14 свободно вращаются от набегающего на них потока воздуха, причем лопасти ветроколес 14, выполняющие функции лопасть-тянущий винт 15, воспринимают набегающий поток воздуха всей своей плоскостью, образуя с ним угол 90 - , вызывая тем самым эффективную и быструю раскрутку ветроколес 14, создающих подъемную аэродинамическую силу за счет лопастей, выполняющих фунции лопастьдинамическое крыло 16. На фиг. 2 уголопределяет угол сектора перехода (разворота) лопастей ветроколес 14 из фазы лопасть-тянущий винт 15 в фазу лопасть-динамическое крыло 16 и наоборот. При достижении на этапе разбега определенной скорости поступательного движения ЛА начнет возникать достаточная подъемная аэродинамическая сила для взлета и вместе с ней начнет возникать потеря сцепления ведущих колес шасси 2 летательного аппарата с поверхностью земли, что станет условием включения муфт сцепления 12 и подключения приводного вала 8 ведущих колес шасси 2 к приводным валам 11 ветродвигателей 9. При этом, увеличивая принудительно от мускульного привода 6, 7 скорость вращения ветроколес 14 по сравнению со скоростью их вращения в режиме авторотации, увеличивается подъемная аэродинамическая сила на лопастяхдинамическое крыло 16, а за счет машущего движения лопастей-тянущий винт 15 в плоскости вращения ветроколес увеличивается сила тяги ЛА. Так осуществляется полет мускулолета, при котором стабилизатор 3 в хвостовой части фюзеляжа 1 обеспечивает продольную устойчивость его полета. Полет мускулолета может проходить в режимах прямолинейного полета и/или поступательного полета. Режим прямолинейного полета, при котором сохраняется скорость поступательного полета и высота, обеспечивается принудительным вращением ветроколес 14 от мускульной силовой установки с определенной угловой скоростьюв зависимости от скорости набегающего потока воздуха снизу (восходящие потоки) и навстречу движения ЛА, а также установленного угла атаки . Режим поступательного полета ЛА циклический и включает в себя фазу планирования с последующей фазой набора высоты. Фаза планирования выполняется за счет поступательного полета ЛА в режиме авторотации ветродвигателей 9. После потери некоторой высоты полета (снижения) и скорости поступательного полета ЛА выполняется переход на режим набора высоты за счет принудительного вращения ветроколес 14 от приводов 6, 7 мускульной силовой установки в том же направлении, что и при авторотации. Затем цикл повторяется. Маневрирование (повороты) мускулолета в ту или иную сторону вокруг вертикальной оси ЛА выполняется следующим образом. Если при поступательном полете ЛА ветродвигатели 9 находятся в режиме авторотации, то вал привода 11 ветродвигателя 9, со стороны которого будет выполняться поворот, соответствующей муфтой сцепления 12 подключается к приводу мускульной силовой установки. В результате разности сил тяги ветродвигателей 9 возникает момент вращения относительно вертикальной оси ЛА. Если при поступательном полете ЛА ветродвигатели 9 находятся в режиме принудительного вращения ветроколес 14 от привода мускульной силовой установки, то ветродвигатель 9, в сторону которого выполняется поворот, переводят в режим авторотации путем отключения муфтой сцепления 12 соответствующий ей приводной вал 11 от приводного вала 8 ведущих колес шасси 2. В результате разности сил тяги ветродвигателей 9 возникает момент вращения относительно вертикальной оси ЛА. Таким образом, учитывая скорость набегающего потока воздуха на ЛА, а также регулируя величину угла атакирычагом 13 и скорость вращения ветроколес 14 от мускульных приводов 6, 7, можно регулировать величину подъемной аэродинамической силы и силы тяги ЛА, а включая или отключая мускульную силовую установку от соответствующих приводных валов 11 ветродвигателей 9, осуществлять поворот в ту или иную сторону вокруг вертикальной оси ЛА. Предлагаемая конструктивная схема мускулолета имеет сходство и с вертолетом, и с автожиром, но это ни то, ни другое, а является новым техническим решением применения способа полета ЛА, основанного на применении ветродвигателей, обеспечивающих эффективное использование энергии ветра в увеличении подъемной аэродинамической силы. ФОРМУЛА ИЗОБРЕТЕНИЯ Мускулолет, содержащий фюзеляж, опирающийся на шасси, включающее два ведущих колеса, соединенных между собой приводным валом, приводной вал соединен цепью с двумя рукоятками, выполняющими функции ручного привода, ножной привод выполнен в виде двух противоположных рукояток, в передней части фюзеляжа установлено сиденье, а в хвостовой установлен стабилизатор,отличающийся тем, что в передней части фюзеляжа установлена консоль мускульной силовой установки, включающая ручной и ножной приводы, кинематически связанные между собой и с приводным валом ведущих колес, два ветродвигателя, симметрично расположенные относительно продольной оси летательного аппарата, прикрепленные к фюзеляжу поперечными силовыми балками аэродинамического профиля, в полости которых установлены при 3 11007 водные валы ветродвигателей, соединенные с приводным валом ведущих колес шасси через муфту сцепления, причем концы поперечных силовых балок установлены в фюзеляже подвижно и жестко связаны между собой рычагом П-образной формы, выполняющим ручной привод поворота этих балок относительно поперечной оси летательного аппарата.
МПК / Метки
МПК: B64C 31/04
Метки: мускулолет, втулкина
Код ссылки
<a href="https://kz.patents.su/4-11007-muskulolet-vtulkina.html" rel="bookmark" title="База патентов Казахстана">Мускулолет Втулкина</a>
Способ полета летательного аппарата
Номер патента: 10532
Опубликовано: 16.06.2003
Автор: Втулкин Александр Павлович
МПК: B64C 27/02
Метки: способ, полета, аппарата, летательного
Формула / Реферат:
Изобретение относится к авиации.Известен способ полета летательного аппарата типа автожир, недостатком которого является зависимость полета ЛА от скорости поступательного движения. Технический результат изобретения - исключение зависимости полета ЛА от скорости поступательного движения и использование энергии ветра. Это обеспечивается применением ветродвигателя в качестве устройства для создания аэродинамических сил, установленного на ЛА с...
Шасси для самоходных сельскохозяйственных машин
Номер полезной модели: 6
Опубликовано: 15.03.1995
Авторы: Жумин Жанат Елемесович, Тлеубергенов Жанибек Акылбекович, Жумин Елемес Жуминович
МПК: A01D 67/00
Метки: самоходных, машин, сельскохозяйственных, шасси
Формула / Реферат:
Полезная модель относится к сельскохозяйственной технике,в частности, к самоходным шасси. Технический результат - упрощение конструкции и повышение ее прочности и надежности достигается в самоходном шасси, содержащем боковые продольные брусья, связанные поперечинами, ось управляемых и ось ведущих колес и установленные на боковых продольных брусьях кабину для водителя и двигатель с выходным валом. Новым в самоходном шасси является то, что ось...
Летательный аппарат и способ его полета

Номер патента: 10310
Опубликовано: 15.12.2003
Автор: Втулкин Александр Павлович
МПК: B64C 27/02
Метки: летательный, способ, аппарат, полета
Формула / Реферат:
Изобретение относится к авиации.Предложен способ полета летательного аппарата, позволяющий применением ветродвигателя, как устройства, обеспечивающего создание аэродинамических сил единым винтом, образующего с фюзеляжем летательный аппарат (ЛА) с двухвинтовой соосной конструктивной схемой расположения винтов, у которого плоскость вращения соосных ветроколес образует с набегающим потоком воздуха положительный угол атаки j, при этом соосные...
Способ запуска космического корабля (варианты), пусковой летательный аппарат для запуска космического корабля, буксируемый самолетом (варианты), буксировочный комплекс для запуска космического корабля
Номер предварительного патента: 6841
Опубликовано: 15.01.1999
Авторы: Келли, Майкл С.
МПК: B64D 5/00
Метки: запуска, космического, буксируемый, способ, корабля, буксировочный, варианты, летательный, пусковой, самолетом, комплекс, аппарат
Формула / Реферат:
Изобретение относится к летательным аппаратам, используемым для запуска космических кораблей, в частности, буксируемым летательным аппаратов, внутри которых установлен запускаемый космический корабль.Буксируемый самолетом пусковой летательный аппарат для запуска космического корабля выполнен в виде планера, включает в себя встроенный отсек полезной нагрузки и имеет дросселированный ракетный двигатель для ускорения полета пускового летательного...
Устройство для раскрутки колес шасси самолета

Номер патента: 262
Опубликовано: 30.12.1993
Авторы: Шураев Кенес Мирзаханович, Майлибаев Марат Муратович
МПК: B64C 25/40
Метки: колес, шасси, раскрутки, устройство, самолета
Формула / Реферат:
Изобретение относится к авиационной технике, а именно к устройствам для раскрутки колес шасси. Целью изобретения является уменьшение габаритов устройства Устройство для раскрутки колес шасси самолета установлено на боковой части поверхности ступицы 1 колеса и выполнено в виде радиальной турбины с рабочими лопатками 2, установленными с взаимным перекрытием, рабочие лопатки выполнены в поперечном сечении выпуклыми во внешнюю сторону бочкообразно...
Предыдущий патент: Натяжное устройство для установки щитовой опалубки
Следующий патент: Мускулолет Втулкина-2
Случайный патент: Способ получения клея "КСинЭт"