Летательный аппарат и способ его полета

Формула / Реферат
Изобретение относится к авиации.
Предложен способ полета летательного аппарата, позволяющий применением ветродвигателя, как устройства, обеспечивающего создание аэродинамических сил единым винтом, образующего с фюзеляжем летательный аппарат (ЛА) с двухвинтовой соосной конструктивной схемой расположения винтов, у которого плоскость вращения соосных ветроколес образует с набегающим потоком воздуха положительный угол атаки j, при этом соосные ветроколеса вращаются свободно от набегающего потока воздуха с одинаковой угловой скоростью в противоположных направлениях или принудительно от силовой установки в том же направлении, что и при авторотации, причем лопасть в рабочем положении ветродвигателя выполняет функцию лопасть-тянущий винт, лопасть во флюгерном положении выполняет функцию лопасть-динамическое крыло. Удержание поворотной головки ветродвигателя и ее поворот на угол g в ту или иную сторону относительно продольной оси ЛА выполняется управляющей осью.
Данный способ полета летательного аппарата, используя ветродвигатель как единый винт в создании аэродинамических сил, воплощает все достоинства способа полета ЛА типа автожир, позволяя при этом снизить используемую мощность силовой установки и эффективно использовать энергию ветра в увеличении подъемной силы.
Текст
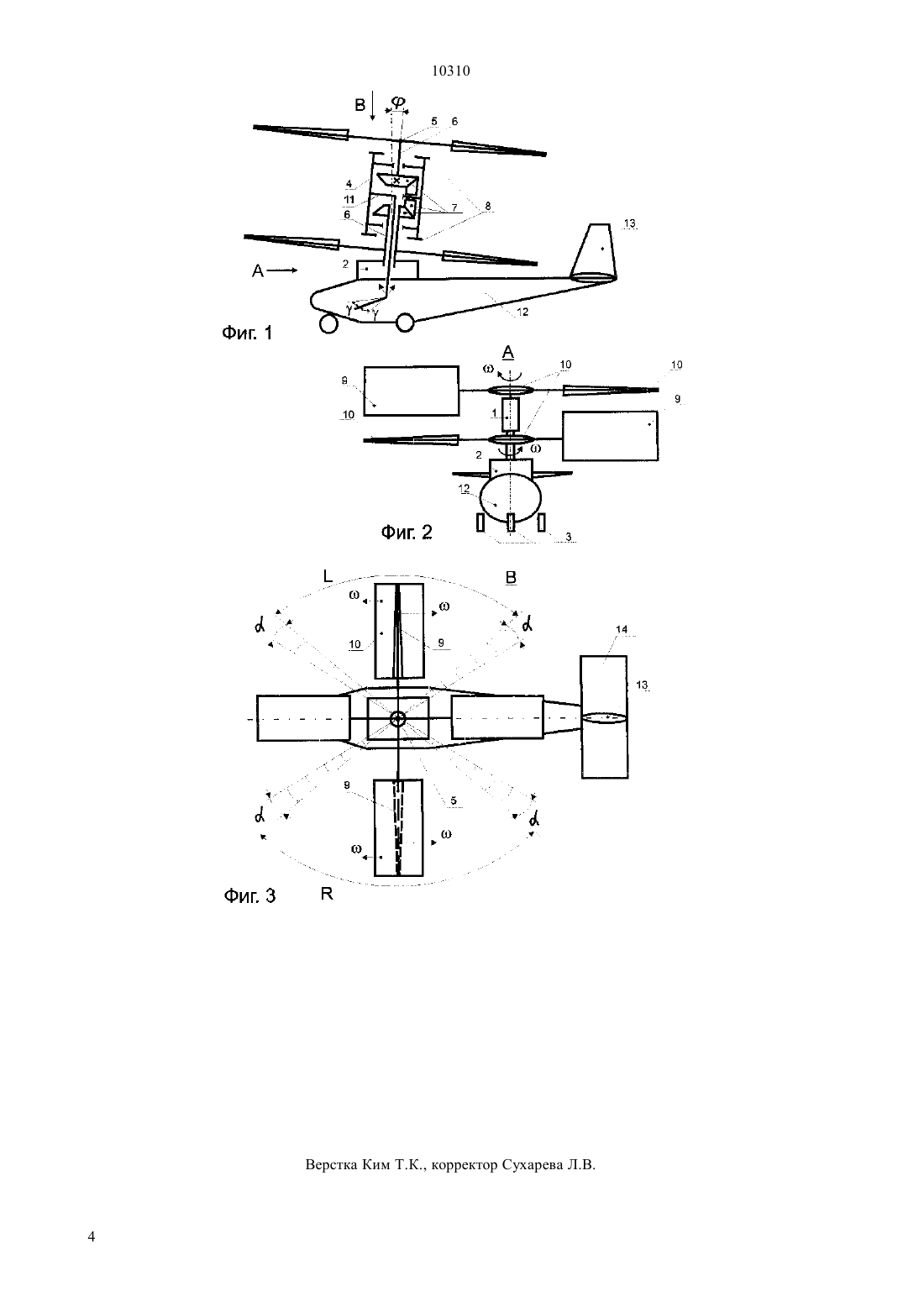
(51)764 27/02 ПАТЕНТНОЕ ВЕДОМСТВО РЕСПУБЛИКИ КАЗАХСТАН(57) Изобретение относится к авиации. Техническим результатом изобретения является возможность создания аэродинамических сил одним винтом летательного аппарата (ЛА) и повышение эффективности использования энергии ветра для увеличения подъемной силы. Это достигается тем, что в ЛА, включающем фюзеляж, ротор и силовую установку, в качестве ротора применен ветродвигатель, который содержит поворотную головку, установленную с возможностью изменения углов наклона ее оси к вертикали и к продольной оси ЛА, и два ветроколеса, установленных соосно с возможностью вращения в противоположные стороны, причем каждое ветроколесо состоит из махов, установленных перпендикулярно к оси поворотной головки, и лопастей, шарнирно закрепленных на концах махов с возможностью их поворота относительно оси маха и фиксации. При этом в способе полета вышеописанного ЛА, включающем создание подъемной аэродинамической силы и силы тяги, плоскостям вращения ветроколес придают положительный угол атаки относительно набегающего потока воздуха, а ветроколеса вращают с одинаковой угловой скоростью в противоположных направлениях набегающим потокам воздуха в режиме авторотации, или принудительно от силовой установки, причем для создания подъемной аэродинамической силы лопасти ветроколес устанавливают в плоскостях вращения ветроколес, а для создания силы тяги - перпендикулярно этим плоскостям. Изобретение относится к авиации. Известен летательный аппарат (ЛА) типа автожир и способ его полета (Изаксон Советское вертолетостроение. М. Машиностроение, 1981, с. 112,113). ЛА включает фюзеляж, силовую установку,ротор (несущий винт) и тянущий винт. Способ его полета заключается в создании подъемной силы свободно вращающимся ротором от набегающего потока воздуха и образующего с ним положительный угол атаки, и силы тяги, создаваемой тянущим винтом, приводимым во вращение силовой установкой и поддерживающим поступательный полет с необходимой скоростью. Недостатками известного способа полета являются создание аэродинамических сил раздельно несущим и тянущим винтами и недостаточная эффективность использования энергии ветра для увеличения подъемной силы ЛА. Задачей изобретения является разработка способа полета ЛА, при котором аэродинамические силы создаются одним винтом и повышается эффективность использования энергии ветра для увеличения подъемной силы, а также конструкции ЛА для осуществления этого способа. Это достигается тем, что в ЛА, включающем фюзеляж, ротор и силовую установку, в качестве ротора применен ветродвигатель, который содержит поворотную головку, установленную с возможностью изменения углов наклона ее оси к вертикали и к продольной оси ЛА, и два ветроколеса, установленных соосно с возможностью вращения в противоположные стороны, причем каждое ветроколесо состоит из махов, установленных перпендикулярно к оси поворотной головки, и лопастей, шарнирно закрепленных на концах махов с возможностью их поворота относительно оси маха и фиксации. При этом в способе полета вышеописанного ЛА, включающем создание подъемной аэродинамической силы и силы тяги, плоскостям вращения ветроколес придают положительный угол атаки относительно набегающего потока воздуха, а ветроколеса вращают с одинаковой угловой скоростью в противоположных направлениях набегающим потокам воздуха в режиме авторотации или принудительно от силовой установки, причем для создания подъемной аэродинамической силы лопасти ветроколес устанавливают в плоскостях вращения ветроколес, а для создания силы тяги - перпендикулярно этим плоскостям. В качестве ветродвигателя может быть использован ветродвигатель, известный по патенту 8440,кл.037/02, 2001. Сущность изобретения поясняется чертежами,где на фиг. 1 приведена схема ЛА, вид сбоку на фиг. 2 - вид А на фиг. 1 на фиг. 3 - вид В на фиг. 1. Летательный аппарат содержит фюзеляж 12 с силовой установкой 2, опирающийся на шасси 3. В хвостовой части фюзеляжа 12 установлен киль 13 и стабилизатор 14. Над фюзеляжем 12 установлен ветродвигатель 1 с соосной конструктивной схемой 2 расположения двух лопастных ветроколес 5, на которых лопасти в рабочем положении выполняют функцию лопасть-тянущий винт 9, лопасти во флюгерном положении выполняют функцию лопастьдинамическое крыло 10, при этом каждое ветроколесо 5 вращается на своей соосной полуоси 6, которые связаны кинематически между собой конусными шестернями 7, установленными на поворотной головке 4, на торцах которой установлены копиры 8. Управляющая ось 11 проходит через полость полуоси 6 нижнего ветроколеса 5 и скреплена одним концом с поворотной головкой 4, а другим концом соединена с органами управления ЛА. Полет ЛА при различных его режимах выполняется следующим образом. Режим взлета ЛА включает в себя следующие этапы разбег и набор высоты. Требуемая скорость поступательного движения ЛА на этапе разбега, необходимая для получения соответствующей скорости набегающего потока воздуха, осуществляется за счет подключения привода ведущих колес шасси 3 ЛА к силовой установке 2, при этом ветродвигатель 1 находится в режиме авторотации, при котором верхнее и нижнее относительно поворотной головки 4 ветродвигателя соосные ветроколеса 5, полуоси 6 вращения которых кинематически связаны конусными шестернями 7, свободно вращаются от набегающего потока воздуха с одинаковой угловой скоростью , но в противоположных направлениях за счет развернутого положения копиров на торцах поворотной головки 4 ветродвигателя относительно друг друга на 180. Плоскость вращения ветроколес 5 с направлением набегающего потока воздуха образует параллельное положение либо положительный угол атаки(см. фиг. 1). При этом лопасти ветроколес 5, выполняющие функции лопасть-тянущий винт 9 воспринимают набегающий поток воздуха всей своей плоскостью и образуют с ним угол 90 , вызывая тем самым эффективную быструю раскрутку и вращение ветроколес 5, создающих подъемную силу за счет лопастей, выполняющих функции лопасть-динамическое крыло 10 (см. фиг. 2). На фиг. 3 уголопределяет угол сектора перекладки(разворота) лопастей ветроколес 5 из фазы лопастьтянущий винт 9 в фазу лопасть-динамическое крыло 10 и наоборот, а угловые секторыиопределяют положения лопастей нижнего и верхнего ветроколеса 5 соответственно в фазе лопасть-тянущий винт 9. При достижении на этом этапе разбега определенной скорости движения начнет возникать достаточная подъемная сила для взлета и вместе с ней начнет возникать потеря сцепления ведущих колес шасси 3 ЛА с поверхностью земли, что станет причиной невозможности дальнейшего увеличения поступательной скорости. Тогда потеря поступательной скорости движения ЛА компенсируется переключением мощности силовой установки 2 с привода ведущих колес шасси 3 ЛА на привод полуоси 6 ветродвигателя 1. При этом, увеличивая принудительно скорость вращения ветроколес 5 по сравнению со скоростью их 10310 вращения в режиме авторотации, компенсируется,во-первых, потеря скорости набегающего потока воздуха, вызывающего необходимую подъемную силу на лопастях ветроколес 5, выполняющих функцию лопасть-динамическое крыло 10, и, во-вторых,увеличивается не только подъемная сила, но и сила тяги, обеспечивающая увеличение скорости поступательного полета ЛА, за счет машущего движения лопастей в рабочем положении на ветроколесах 5 по направлению их вращения. Фюзеляж 12 летательного аппарата имеет хвостовое оперение, состоящее из киля 13 и стабилизатора 14, обеспечивающих поперечную и продольную устойчивость полета ЛА. Режим полета ЛА, реализующий предлагаемый способ полета, состоит из прямолинейного полета и/или поступательного полета. Режим прямолинейного полета, при котором сохраняется скорость поступательного полета и высота, обеспечивается принудительным вращением ветроколес 5 с определенной скоростью в зависимости от скорости набегающего потока воздуха снизу (восходящие потоки) и навстречу движения ЛА, а также установленного угла атаки . Режим поступательного полета циклический и включает в себя фазу планирования с последующей фазой набора высоты. Фаза планирования выполняется за счет поступательного полета ЛА в режиме авторотации ветродвигателя 1. После потери некоторой высоты полета (снижения) и скорости поступательного полета выполняется переход на режим набора высоты за счет принудительного вращения соосных ветроколес 5 от привода силовой установки 2 в том же направлении, что и при авторотации. Затем цикл повторяется. Режим маневрирования (повороты). Прямолинейное движение ЛА в полете обеспечивается удержанием поворотной головки 4 ветродвигателя с помощью управляющей оси 11, которая исключает вращение поворотной головки 4 вокруг полуосей 6 и ориентирует вектор силы тяги ветродвигателя 1 вдоль продольной оси ЛА. Поворот в ту или иную сторону вокруг вертикальной оси ЛА выполняется поворотом управляющей осью 11 поворотной головки 4 ветродвигателя на уголотносительно продольной оси ЛА. В результате изменения направления вектора силы тяги ветродвигателя относительно предыдущего направления за счет углового изменения положения копиров 8 в плоскости вращения ветроколес 5 возникает момент вращения фюзеляжа 12 ЛА относительно его вертикальной оси, обеспечивающий совмещение продольной оси ЛА с установленным направлением вектора силы тяги ветродвигателя 1. Таким образом, учитывая скорость набегающего потока воздуха, а также регулируя величину угла атакии угловую скоростьвращения ветроколес 5, можно регулировать величину подъемной силы и силу тяги летательного аппарата, а изменением угла поворотаповоротной головки ветродвигателя задавать направления вектору силы тяги ЛА. Данный способ полета летательного аппарата,использующего ветродвигатель как единый винт в создании аэродинамических сил, воплощает все достоинства способа полета ЛА типа автожир, позволяя при этом снизить мощность силовой установки и эффективно использовать энергию ветра в увеличении подъемной силы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Летательный аппарат, включающий фюзеляж,ротор и силовую установку, отличающийся тем,что в качестве ротора применен ветродвигатель,который содержит поворотную головку, установленную с возможностью изменения углов наклона ее оси к вертикали и к продольной оси летательного аппарата, и два ветроколеса, установленных соосно с возможностью вращения в противоположные стороны, причем каждое ветроколесо состоит из махов,установленных перпендикулярно к оси поворотной головки, и лопастей, шарнирно закрепленных на концах махов с возможностью их поворота относительно оси маха и фиксации. 2. Способ полета летательного аппарата по п. 1,включающий создание подъемной аэродинамической силы и силы тяги, отличающийся тем, что плоскостям вращения ветроколес придают положительный угол атаки относительно набегающего потока воздуха, при этом ветроколеса вращают с одинаковой угловой скоростью в противоположных направлениях набегающим потокам воздуха в режиме авторотации или принудительно от силовой установки, причем для создания подъемной аэродинамической силы лопасти ветроколес устанавливают в плоскостях вращения ветроколес, а для создания силы тяги - перпендикулярно этим плоскостям.
МПК / Метки
МПК: B64C 27/02
Метки: полета, летательный, аппарат, способ
Код ссылки
<a href="https://kz.patents.su/4-10310-letatelnyjj-apparat-i-sposob-ego-poleta.html" rel="bookmark" title="База патентов Казахстана">Летательный аппарат и способ его полета</a>
Способ полета летательного аппарата
Номер патента: 10532
Опубликовано: 16.06.2003
Автор: Втулкин Александр Павлович
МПК: B64C 27/02
Метки: аппарата, полета, летательного, способ
Формула / Реферат:
Изобретение относится к авиации.Известен способ полета летательного аппарата типа автожир, недостатком которого является зависимость полета ЛА от скорости поступательного движения. Технический результат изобретения - исключение зависимости полета ЛА от скорости поступательного движения и использование энергии ветра. Это обеспечивается применением ветродвигателя в качестве устройства для создания аэродинамических сил, установленного на ЛА с...
Способ полета в околоземном пространстве и летательный аппарат для его осуществления
Номер предварительного патента: 3169
Опубликовано: 15.03.1996
Авторы: Семикопенко Павел Борисович, Отелбаев Мухтарбай Отелбаевич, Айдарбеков Адильхан Оспанкулович, Мухамбетжанов Салтанбек Талапединович
МПК: B64G 1/32
Метки: околоземном, аппарат, пространстве, летательный, способ, осуществления, полета
Формула / Реферат:
Изобретение относится к авиации, в частности к техническим средствам полетов с использованием геомагнитного поля.Достигаемый технический результат - повышение автономности осуществления полетов.При осуществлении взлета и полета силу гравитации компенсируют силой Ампера, создаваемой летательным аппаратом, для чего аппарат имеет забортную пространственную панель с концентрическими круговыми сверхпроводящими токопроводами, генерирующими...
Летательный аппарат
Номер патента: 5913
Опубликовано: 15.06.2000
Автор: Фрик Александер
МПК: B64C 39/02
Метки: летательный, аппарат
Формула / Реферат:
Изобретение относится к летательному аппарату специального назначения, который может применяться в качестве транспортного средства для оказания первой помощи в спасательных операциях в труднодоступных местностях, а также для выполнения контроля и наблюдения.Устанавливаемый на груз и закрепляемый лета-тельный аппарат, в котором грузом может быть летчик Р или устройство дистанционного управления, оборудован закрепляемым на грузе опорным...
Способ запуска космического корабля (варианты), пусковой летательный аппарат для запуска космического корабля, буксируемый самолетом (варианты), буксировочный комплекс для запуска космического корабля
Номер предварительного патента: 6841
Опубликовано: 15.01.1999
Авторы: Келли, Майкл С.
МПК: B64D 5/00
Метки: самолетом, космического, аппарат, буксируемый, буксировочный, пусковой, запуска, варианты, летательный, комплекс, способ, корабля
Формула / Реферат:
Изобретение относится к летательным аппаратам, используемым для запуска космических кораблей, в частности, буксируемым летательным аппаратов, внутри которых установлен запускаемый космический корабль.Буксируемый самолетом пусковой летательный аппарат для запуска космического корабля выполнен в виде планера, включает в себя встроенный отсек полезной нагрузки и имеет дросселированный ракетный двигатель для ускорения полета пускового летательного...
Способ полета в атмосфере и орнитоптер для его осуществления
Номер предварительного патента: 3172
Опубликовано: 15.03.1996
Авторы: Отелбаев Мухтарбай Отелбаевич, Калыбаев Айсултан Абдуллович, Айдарбеков Адильхан Оспанкулович, Семикопенко Павел Борисович, Мухамбетжанов Асылбек Талапединович, Мухамбетжанов Салтанбек Талапединович
МПК: B64C 33/00
Метки: осуществления, атмосфере, способ, орнитоптер, полета
Формула / Реферат:
Изобретение относится к области авиации, использующей принцип полета птиц - орнитоптерам.Достигаемый изобретением технический результат - повышение КПД и снижение расхода энергии.Способ полета и осуществляющий его орнитоптер основаны на использовании реакции еще одной среды, кроме воздуха атмосферы - геомагнитного поля. Для этого крылья орнитоптера содержат распределенные по плоскости сверхпроводящие витки с током, магнитное поле которых...
Предыдущий патент: Способ ведения взрывных работ в горячих массивах и устройство для его осуществления
Следующий патент: Бифлавоноид, проявляющий противоопухолевую и Р-витаминную активность
Случайный патент: Энергетическая установка на основе энергии солнца и ветра