Способ полета летательного аппарата
Формула / Реферат
Изобретение относится к авиации.
Известен способ полета летательного аппарата типа автожир, недостатком которого является зависимость полета ЛА от скорости поступательного движения.
Технический результат изобретения - исключение зависимости полета ЛА от скорости поступательного движения и использование энергии ветра.
Это обеспечивается применением ветродвигателя в качестве устройства для создания аэродинамических сил, установленного на ЛА с поперечной конструктивной схемой расположения, плоскость вращения соосных жестко закрепленных на торцах оси вращения ветроколес образует с набегающим потоком воздуха положительный угол атаки j, при этом лопасти ветроколес вращаются свободно от набегающего потока воздуха или принудительно от силовой установки, причем лопасть в рабочем положении ветродвигателя выполняет функцию лопасть - тянущий винт, лопасть во флюгерном положении выполняет функцию лопасть - динамическое крыло.
Данный способ полета летательного аппарата снижает используемую мощность силовой установки, эффективно использует энергию ветра в создании аэродинамических сил и обеспечивает безопасность полета ЛА при потере им поступательной скорости полета.
Текст
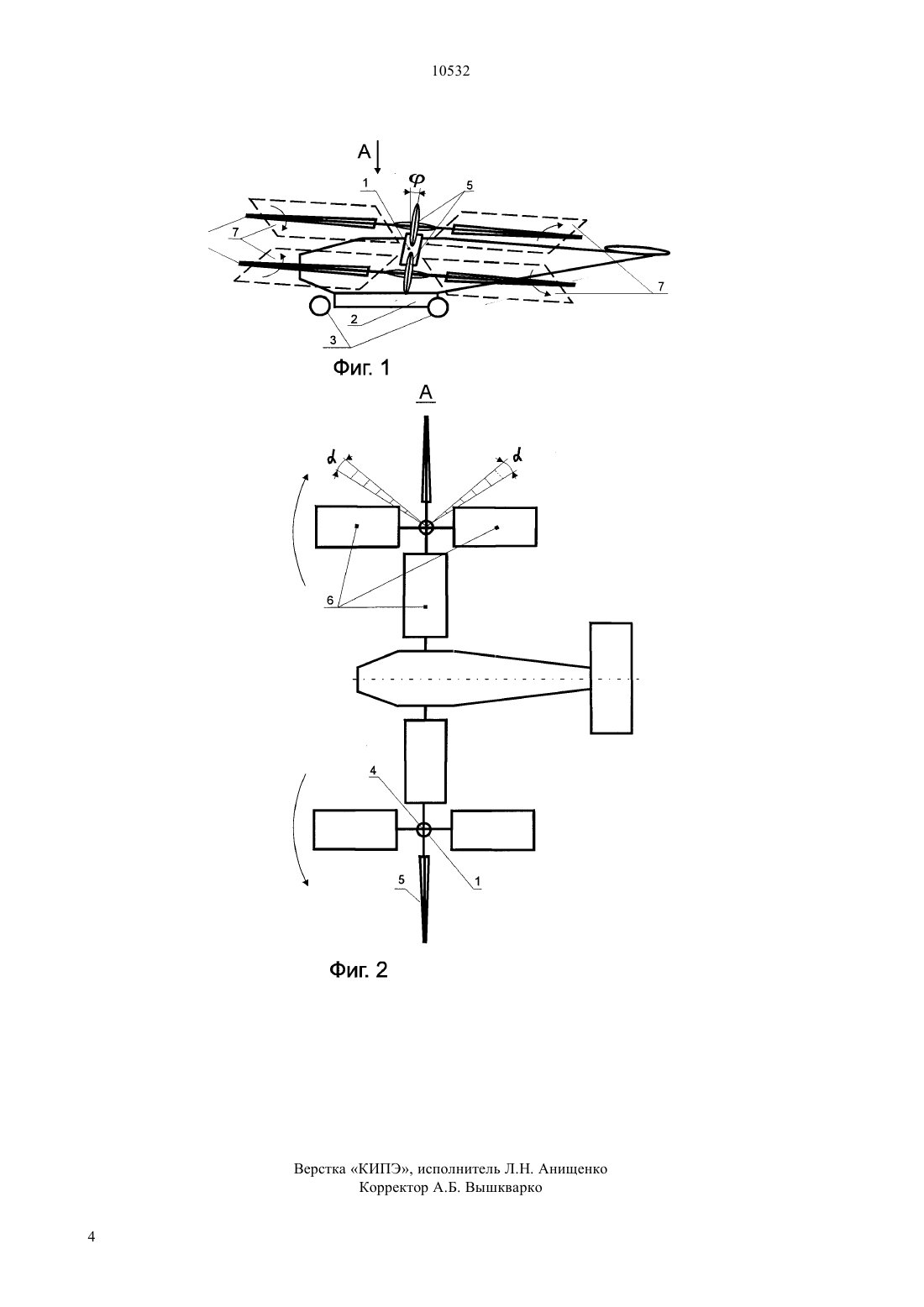
(51)7 В 64 С 27/02 НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО РЕСПУБЛИКИ КАЗАХСТАН(57) Изобретение относится к авиации. Известен способ полета летательного аппарата типа автожир, недостатком которого является зависимость полета ЛА от скорости поступательного движения. Технический результат изобретения - исключение зависимости полета ЛА от скорости поступательного движения и использование энергии ветра. Это обеспечивается применением ветродвигателя в качестве устройства для создания аэродинамических сил, установленного на ЛА с поперечной кон структивной схемой расположения, плоскость вращения соосных жестко закрепленных на торцах оси вращения ветроколес образует с набегающим потоком воздуха положительный угол атаки , при этом лопасти ветроколес вращаются свободно от набегающего потока воздуха или принудительно от силовой установки, причем лопасть в рабочем положении ветродвигателя выполняет функцию лопасть тянущий винт, лопасть во флюгерном положении выполняет функцию лопасть - динамическое крыло. Данный способ полета летательного аппарата снижает используемую мощность силовой установки, эффективно использует энергию ветра в создании аэродинамических сил и обеспечивает безопасность полета ЛА при потере им поступательной скорости полета. 10532 Изобретение относится к авиации. Известен способ полета летательного аппарата(ЛА) типа автожир (Катышев Г.И. Создатель автожира ХУАН де ла СЬЕРВА. М. Наука, 1986),(Изаксон А.М. Советское вертолетостроение. М. Машиностроение, 1981, с. 111-146), заключающийся в создании подъемной силы свободно вращающимся ротором (несущий винт) от набегающего потока воздуха и образующего с ним положительный угол атаки и силы тяги, создаваемой тянущим винтом, приводимым во вращение силовой установкой и поддерживающим поступательный полет с определенной скоростью. Недостатком известного способа является создание раздельно несущим и тянущим винтами аэродинамических сил и необходимость придания летательному аппарату определенной скорости поступательного движения как условия поддержания его в полете, что исключает возможность зависать в воздухе, а также неэффективность использования энергии ветра для увеличения подъемной силы. Техническим результатом изобретения является обеспечение независимости полета от скорости поступательного движения и эффективное использование энергии ветра для увеличения подъемной силы. Это достигается тем, что в способе полета летательного аппарата, заключающемся в создании подъемной силы от набегающего потока воздуха и силы тяги, создаваемой тянущим винтом, приводимым во вращение силовой установкой, применяют ветродвигатель (предварительный патент Казахстана 8440 от 06.10.98033/00. Ветродвигатель. Опубликован в бюллетене Промышленная собственность Казахстана 2000,1) в качестве устройства для создания аэродинамических сил, установленного на летательном аппарате с поперечной конструктивной схемой, плоскость вращения соосных,жестко закрепленных на торцах оси вращения ветроколес образует с набегающим потоком воздуха положительный угол атаки , при этом лопасти ветроколес вращаются свободно от набегающего потока воздуха или принудительно от силовой установки в том же направлении, что и при авторотации, причем лопасть в рабочем положении ветродвигателя выполняет функцию лопасть - тянущий винт, лопасть во флюгерном положении выполняет функцию лопасть - динамическое крыло. Сущность изобретения поясняется графическим материалом, где на фиг. 1 - вид сбоку, на фиг. 2 вид А сверху, схема летательного аппарата, реализующего способ, который выполняется для различных режимов полета ЛА следующим образом. Режим взлета ЛА включает в себя следующие этапы разбег и набор высоты. Требуемая скорость поступательного движения ЛА на этапе разбега, необходимая для получения соответствующей скорости набегающего потока воздуха, достигается за счет подключения привода ведущих колес шасси 3 ЛА к силовой установке 2, при этом ветродвигатели 1 находятся в режиме авторотации, при котором лопасти 2 ветроколес 4 свободно вращаются от набегающего потока воздуха, причем плоскость вращения ветроколес 4 с направлением набегающего потока воздуха образует положительный угол атаки(см фиг. 1). При этом лопасти ветроколес 4, выполняющие функции лопасть - тянущий винт 5, воспринимают набегающий поток воздуха всей своей плоскостью и образуют с ним угол 90 о - , вызывая тем самым эффективную и быструю раскрутку ветроколес 4,создающих подъемную силу за счет лопастей, выполняющих функции лопасть - динамическое крыло 6. На фиг. 1 показана динамика перехода лопасти 7(стрелкой и пунктирной линией) из фазы лопасть тянущий винт 5 в фазу лопасть - динамическое крыло 6 и наоборот, а на фиг. 2 уголопределяет угол сектора перехода лопасти 7 из одной фазы в другую. При достижении на этапе разбега необходимой поступательной скорости движения начнет возникать достаточная подъемная сила для взлета и вместе с ней начнет возникать потеря сцепления ведущих колес шасси 3 ЛА с поверхностью земли, что станет причиной невозможности дальнейшего увеличения поступательной скорости. Тогда потеря поступательной скорости движения компенсируется переключением мощности силовой установки 2 с привода ведущих колес шасси 3 ЛА на привод ветродвигателей 1. При этом, увеличивая принудительно скорость вращения ветроколес 4 по сравнению со скоростью их вращения в режиме авторотации, компенсируется, во-первых, потеря скорости набегающего потока воздуха, вызывающего необходимую подъемную силу, и, во-вторых, увеличивается не только подъемная сила, но и сила тяги, обеспечивающая увеличение скорости поступательного полета. Режим полета ЛА, реализующий предлагаемый способ, состоит из прямолинейного полета и/или поступательного полета. Режим прямолинейного полета, при котором сохраняется скорость поступательного полета и высота, обеспечивается постоянным принудительным вращением ветроколес 4 с необходимой скоростью в зависимости от скорости набегающего потока воздуха снизу (восходящие потоки) и навстречу движению Л, а также установленного угла атаки . Режим поступательного полета циклический и включает в себя фазу планирования с последующей фазой набора высоты. Фаза планирования выполняется за счет поступательного полета ЛА в режиме авторотации ветродвигателей. После потери некоторой высоты полета (снижения) и скорости поступательного полета выполняется переход на режим набора высоты за счет принудительного вращения ветроколес 4 от привода силовой установки 2 в том же направлении, что и при авторотации. Затем цикл повторяется. Режим маневрирования (повороты) в ту или иную сторону вокруг вертикальной оси ЛА выполняется следующим образом. Если при поступательном полете ветродвигатели 1 находятся в режиме авторотации, то в ветродвигателе 1, в сторону которого 10532 будет выполняться поворот, создается торможение вращения ветроколес 4. В результате разности сил лобового сопротивления ветродвигателей 1, симметрично расположенных относительно продольной оси Л, возникает момент вращения относительно вертикальной оси, обеспечивающий поворот. Если при поступательном полете ветродвигатели 1 находятся в режиме принудительного вращения ветроколес 4,то ветродвигатель, в сторону которого выполняется поворот, переводят в режим авторотации путем отключения его привода от силовой установки 2. В результате разности сил тяги ветродвигателей 1 возникает момент вращения относительно вертикальной оси ЛА, обеспечивающий поворот. Режим снижения (посадка) ЛА при полном отсутствии поступательной скорости движения будет осуществляться за счет режима авторотаций ветродвигателей 1, однако направление вращения ветроколес 4 будет противоположным по отношению к вращению ветроколес 4, вызванное поступательным движением в режиме авторотации или принудительного вращения. Изменение направления происходит из-за набегающего потока воздуха, возникающего от вертикальной скорости движения ЛА вниз и направленного на плоскости лопасть-тянущий винт 5, которая имеет с вертикальным потоком воздуха угол атаки, равный . Режим зависания ЛА в воздухе выполняется следующим образом. В зависимости от скорости набегающего потока воздуха устанавливается соответствующий угол атаки , при котором за счет принудительного вращения силовой установкой 2 лопастей ветроколес 4 создаются подъемная сила и сила тяги такой величины, чтобы их результирующая полностью компенсировала результирующую, создаваемую весом ЛА и силой лобового сопротивления ЛА,причем, если скорость набегающего потока воздуха равна нулю, то угол атаки 90 о и подъемная сила ЛА создается только за счет силы тяги лопастей ветроколес 4, выполняющих функцию лопасть - тянущий винт 5. Таким образом, учитывая скорость набегающего потока воздуха, а также регулируя величину угла атакии скорость вращения ветроколес 4, можно регулировать величину подъемной силы и силу тяги летательного аппарата. Данный способ полета летательного аппарата позволяет снизить мощность силовой установки и эффективно использовать энергию ветра в создании аэродинамических сил, а также исключить зависимость полета ЛА от скорости поступательного движения, тем самым обеспечивая безопасность его полета. ФОРМУЛА ИЗОБРЕТЕНИЯ Способ полета летательного аппарата, заключающийся в создании подъемной аэродинамической силы от набегающего потока воздуха и силы тяги,создаваемой тянущим винтом, приводимым во вращение силовой установкой, отличающийся тем,что для создания подъемной аэродинамической силы применяют ветродвигатели, плоскостям вращения лопастей ветроколес которых придают положительный угол атаки относительно набегающего потока воздуха, обеспечивая вращение лопастей ветроколес свободно набегающим потоком воздуха режим авторотации, или лопасти ветроколес вращают принудительно от силовой установки в том же направлении, что и при авторотации, причем положение лопастей ветродвигателя изменяют таким образом, что в рабочем положении они выполняют функцию лопасть-тянущий винт, а во флюгерном положении они выполняют функцию лопастьдинамическое крыло.
МПК / Метки
МПК: B64C 27/02
Метки: полета, способ, аппарата, летательного
Код ссылки
<a href="https://kz.patents.su/4-10532-sposob-poleta-letatelnogo-apparata.html" rel="bookmark" title="База патентов Казахстана">Способ полета летательного аппарата</a>
Способ полета в атмосфере и орнитоптер для его осуществления
Номер предварительного патента: 3172
Опубликовано: 15.03.1996
Авторы: Мухамбетжанов Асылбек Талапединович, Семикопенко Павел Борисович, Айдарбеков Адильхан Оспанкулович, Мухамбетжанов Салтанбек Талапединович, Отелбаев Мухтарбай Отелбаевич, Калыбаев Айсултан Абдуллович
МПК: B64C 33/00
Метки: полета, способ, орнитоптер, осуществления, атмосфере
Формула / Реферат:
Изобретение относится к области авиации, использующей принцип полета птиц - орнитоптерам.Достигаемый изобретением технический результат - повышение КПД и снижение расхода энергии.Способ полета и осуществляющий его орнитоптер основаны на использовании реакции еще одной среды, кроме воздуха атмосферы - геомагнитного поля. Для этого крылья орнитоптера содержат распределенные по плоскости сверхпроводящие витки с током, магнитное поле которых...
Упругодеформируемый отражатель антенны для космического летательного аппарата
Номер предварительного патента: 9188
Опубликовано: 15.06.2000
Авторы: НУАР, Алан, Шьёсс, Натали, КОТРЮ, Гийом, ПРЮД'ОН, Кристоф
МПК: H01Q 15/16, H01Q 1/28
Метки: антенны, аппарата, отражатель, космического, упругодеформируемый, летательного
Формула / Реферат:
Изобретение относится к космической технике. Отражатель (1) антенны предназначен для космического летательного аппарата (14) и выполнен так, что может упругодеформироваться и переходить из свернутого в развернутое положение, по меньшей мере, частично под действием своей собственной упругости. Отражатель характеризуется тем, что содержит, по меньшей мере, одну линию изгиба (2, 3), общее направление которой, по меньшей мере, приблизительно...
Способ измерения расхода жидкостей и газов
Номер патента: 684
Опубликовано: 15.03.1994
Автор: Маненьков Петр Иванович
МПК: G01F 5/00
Метки: измерения, газов, жидкостей, способ, расхода
Формула / Реферат:
Изобретение относится к измерениям массового расхода жидкостей, газов и их смесей и может быть использовано в нефтяной и газовой промышленности. Цель изобретения - повышение точности измерения - достигается за счет стабилизации угла атаки тела обтекания, совершающего вынужденные колебания в потоке. При постоянном угле атаки частота вынужденных колебаний тела обтекания прямо пропорциональна скорости потока, а величина возбуждающей силы,...
Упругодеформируемый отражатель антенны для космического летательного аппарата и космический летательный аппарат, содержащий такой отражатель
Номер предварительного патента: 9189
Опубликовано: 15.06.2000
Авторы: КОТРЮ, Гийом, ПРЮД'ОН, Кристоф, Метз, Сириль, Дюкуртиаль, Кристиан, Шьёсс, Натали
МПК: H01Q 15/16
Метки: летательного, аппарата, космический, содержащий, аппарат, отражатель, упругодеформируемый, антенны, космического, летательный
Формула / Реферат:
Изобретение относится к технике космических средств связи. Достигаемый технический результат изобрете-ния - увеличение размеров антенн, выводимых в космос летательных аппаратов за счет большей компактности антенных отражателей в свернутом виде.Отражатель антенны содержит радиальную щель 2. В свернутом положении отражателя 1 расположенные напротив друг друга края 2А, 2В радиальной щели 2 накладываются друг на друга таким образом, чтобы...
Способ полета в околоземном пространстве и летательный аппарат для его осуществления
Номер предварительного патента: 3169
Опубликовано: 15.03.1996
Авторы: Отелбаев Мухтарбай Отелбаевич, Семикопенко Павел Борисович, Мухамбетжанов Салтанбек Талапединович, Айдарбеков Адильхан Оспанкулович
МПК: B64G 1/32
Метки: полета, осуществления, летательный, околоземном, способ, пространстве, аппарат
Формула / Реферат:
Изобретение относится к авиации, в частности к техническим средствам полетов с использованием геомагнитного поля.Достигаемый технический результат - повышение автономности осуществления полетов.При осуществлении взлета и полета силу гравитации компенсируют силой Ампера, создаваемой летательным аппаратом, для чего аппарат имеет забортную пространственную панель с концентрическими круговыми сверхпроводящими токопроводами, генерирующими...
Предыдущий патент: Пространственный рычажный регулируемый механизм
Следующий патент: Рядковое устройство хлопкоуборочной машины
Случайный патент: Штамм гриба Beauveria bassiana (Balsamo) Vuillemin ВСос2-12 для получения биопрепарата против сосущих вредителей защитного грунта