Устройство для контроля внутренней поверхности трубопровода
Номер патента: 1274
Опубликовано: 15.09.1994
Авторы: Мулюков Франгиз Гилязович, Быков Валерий Павлович, Самойлович Владимир Иванович, Ежов Владимир Сергеевич, Аркадьев Аркадий Михайлович, Полозок Николай Владимирович
Формула / Реферат
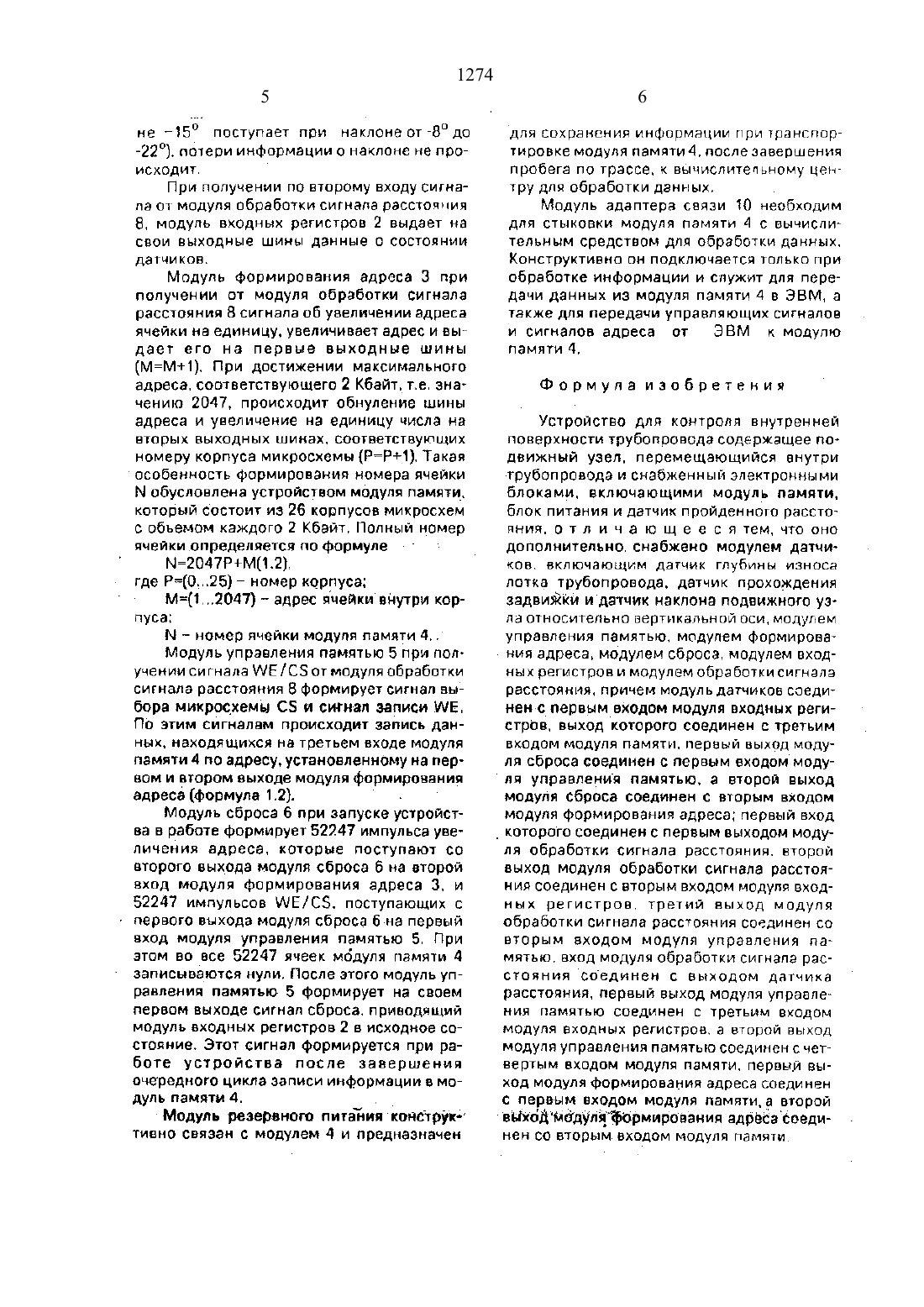
Сущность изобретения: подвижный узел, перемещающийся внутри трубопровода. снабжен электронными блоками, содержащими модуль памяти, блок питания и датчик пройденного расстояния. Модуль датчиков содержит датчик глубины износа лотка трубопровода, датчик прохождения задвижки и датчик наклона подвижного узла относительно вертикальной оси. Модуль датчиков соединен с первым входом модуля входных регистров, выход к-рого соединен с третьим входом модуля памяти. Первый выход модуля сброса соединен с первым входом модуля управления памятью, второй выход модуля сброса соединен с вторым входом модуля формирования адреса, первый вход к-рого соединен с первым выходом модуля обработки сигнала расстояния, второй выход к-рого соединен с вторым входом модуля входных регистров. Третий выход модуля обработки сигнала расстояния соединен с вторым входом модуля управления памятью. Вход модуля обработки сигнала расстояния соединен с выходом датчика расстояния. Первый выход модуля управления памятью соединен с третьим входом модуля входных регистров. Второй выход модуля управления памятью соединен с четвертым входом модуля памяти. Первый выход модуля формирования адреса соединен с первым входом модуля памяти, второй выход - с вторым входом модуля памяти.
Текст
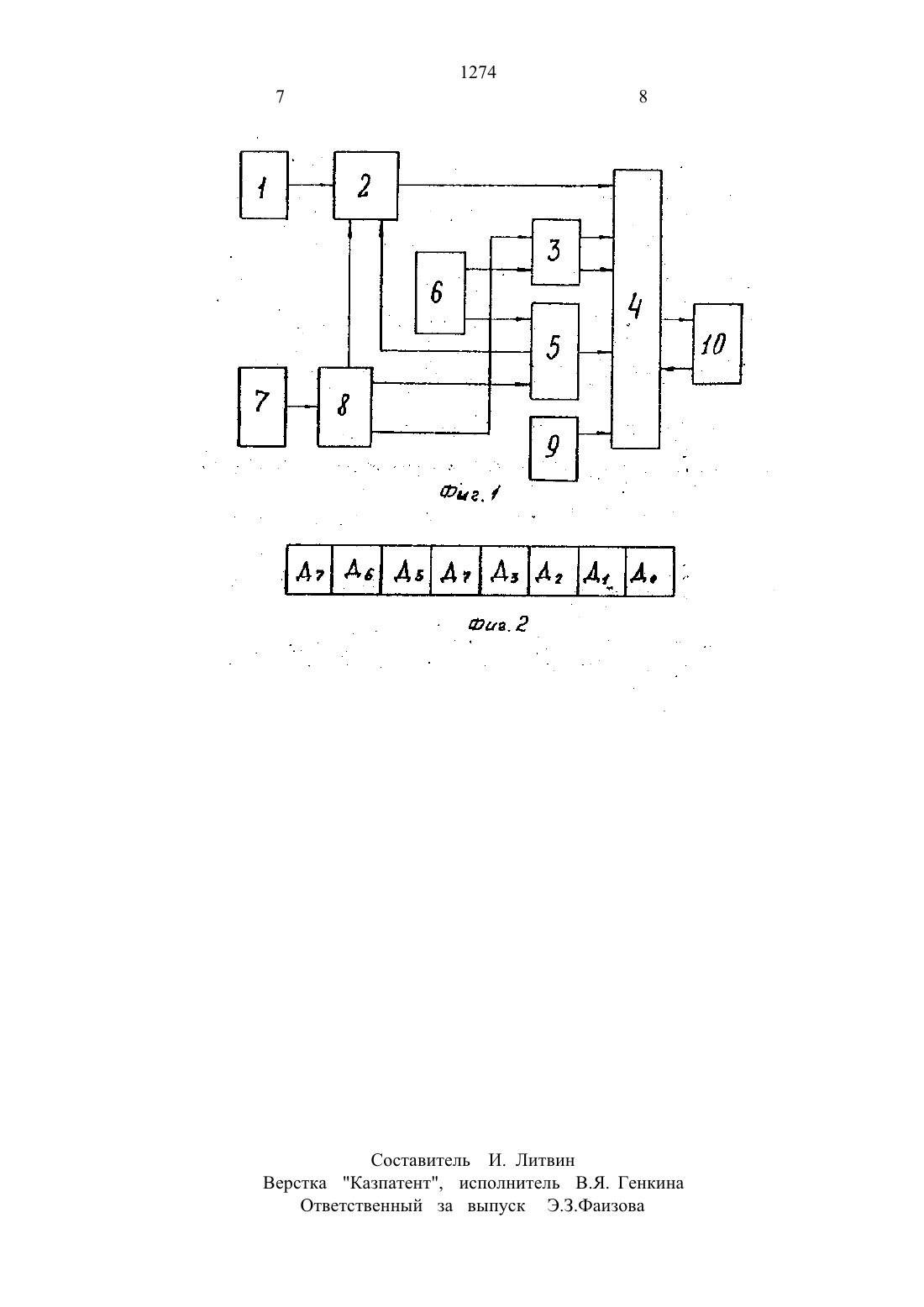
НАЦИОНАЛЬНОЕ ПАТЕНТНОЕ ВЕДОМСТВО ПРИ КАБИНЕТЕ МИНИСТРОВ54 УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА(57)Сущность изобретения подвижный узел. перемещающийсявнутри трубопровода, снабжен электронными блоками. содержащими модуль памяти. блок питания и датчик пройденного расстояния. Модуль датчиков содержит датчик глубины износа лотка трубопровода. датчик прохождения задвижки и датчик наклона подвижного узла относительно вертикальной оси. Модульдатчиков соединен с первым входом модуля входных регистров. выход к-рого соединен с третьим входом модуля памяти. Первыйвыход модуля сброса соединен с первым входом модули управления памятью. второй выход модуля сброса соединен с вторым входом модуля формирования адреса. пер 7 вый вход к-рого соединен с первым выходоммодуля обработки сигнала расстояния. второй выход к-рого соединен с вторым входоммодуля обработки сигнала расстояния сое динен с вторым входом модуля управленияпамятью. Вход модуля обработки сигнала расстояния соединен с выходомдатчикв расстояния. Первый выход модуля управления памятью соединен с третьим входом модуля входных регистров. Второй выход модули управления памятью соединен с четвертым входом модуля памяти. Первый выход модуля формирования адреса соединен с первым входом модуля памяти. второй вы ход свторым входом модуля памяти. 2 ил.Изобретение относится к устройствам. предназначенным для контроля состояния проходного сечения трубопровода. сбораинформации о дефектах нутреннвй повер- хности труб и может быть использовано приЦель изобретения является повышение надежности работы устройства за счет упро-щения конструкции и снижения потребляемой мощности.и тгйэьтвсв 1 ояьеегча бпяктяхяве предлагаемого устройства на фиг. 2 формат слова. записываемого ячейку памяти.Устройство для контроля внутренней поверхности трубопровода включает-подвижный узел. перемещающийся внутри трубопровода и несущий электронные блоки. содержащие модуль датчиков 1. модуль входных регистров 2. модуль сброса 6. модуль формирования адреса З. модуль памяти 4. модуль управления памятью 5. модульобработки сигнала расстояния 8 с датчиком .расстоянияТ. модуль резервного питания 9и модуль адаптера связи 10. Модуль датчи ков включает датчики глубины износа лоткатрубопроводшдатчик прохождения задатке нки и датчик наклона подвижного узла относительно вертикальной оси не показаны.Модуль датчиков глубины износа представляет собой группы по три геркона. Магнитная ось срабатывания первого из них смещена относительно нулевой отметки. соответствующей неизношенной поверхности трубопровода. на 3 мм вниз. магнитные оси двух дрУгих на б и 9 мм соответственно. магнитные оси срабатывания датчиков прохождения задвижки смещены относительно нулевой отметки на 24 мм вниз. Модуль датчиков угла наклона выполнен в виде маятника. ось которого совмещена с вертикальной осью подвижного узла устройства. В местах отклонения маятника от вертикального положения на -30. -15. 15 и ЗО установлены герконы.Датчик расстояния выполнен в видегерконовых реле. срабатывающих при прохождении мимо них магнитов. движение котор ых задается через систему механических передач рельефом внутренней поверхности лотка трубопровода. наклоном всей конструкции в ту или иную стороны относительно вертикальной оси и стыками. образованными стоящими вдоль всей трассы задвижкаМИ. Модуль датчиков 1, соединен с первым входом модуля входных регистров 2. выход которого соединен с третьим входом модуля памяти 4. Первый выход модуля сброса Б соединен с первым входом модуля управления памятью 5. а второй выход модуля сброса 6 соединен со вторым входом модуля формирования адреса 3. первый вход которого соединен с первым выходом модуля обработки сигнала расстояния 8. второй выход модуля обработки сигнала расстояния В соединен со-вторым входом модуля входных регистров 2. Третий выход модуля обработки сигнала расстояния В соединен со вторым входом модуля управления памятью 5. вход модуля обработки сигнала расстояния В соединен с выходом датчика расстояния 7. Первый выход модуля управления памятью 5 соединен с третьим входом модуля входных регистров 2. а второй выход модуля управления памятью 5 соединен с четвертым входом модуля памяти 4. Первый выход модуля формирования адреса 3 соединен с перым входом модуля памяти 4. а второй выход модуля формирования 3 адреса соединен со вторым входом модуля памяти 4. Выход модуля резервного питания 9 соединен с пятым входом модуля -.пвмяти.4.а вы ход модуля ттамяти соединен с входом модуля адаптера связи 10.минания сигналов от датчиков в определенные моменты времени, зависящие от значения пройденного расстояния. В ячей 1274КИ МОДУЛЯ ПЭМЯТИ 4 ЗЗПИСЫВЗЮТСЯ СИГНЗЛЫ от датчиков через каждые лВзК. где К количество оборотов колеса датчика расстояния 7 (задается равным 1, 2. 4. 7 и т.д. и определяется типом перемычки установленной в модуле управления памятью 5. 03 диаметр рабочего колеса датчика расстояния 7, При прохождении каждых л ВвК м в очередную ячейку, начиная с первой. записывается состояние датчиков за предыдущий отрезок пройденного пути. .Таким образом. информацию о величине пройденного пути Зп несет ячейка с номером М. умножением на л 35 К м.а информацию о состоянии датчиков на отрезке пути от Зп-т до Зп содержимое ячейки с номером М.Содержимое ячейки представляет собой восьмиразрядное число. где логическая 1 враэряде оаначаетналичие соответствующего сигнала а логический- его отсутСТВИе. .. модуля памяти 4 и его расшифровка по раз рядной информации представлены на фиг. 2. где 00.01. 02. ВЗ наклон подвижного узла устройства относительно вертикальной оси. соответственно на -30, -15. 15 и 3 О 04 - прохождение задвижки. 05. ЭВ и 37 глубтдна износа лотка трубопровода соотввтственноЗ 6 и 9 мм. дУстройство работает следующим образом. В зависимости от установленной перемычки. ХЪН. ХМ 2 или ХМЗ. задающейоборотов рабочего колеса датчика расстояния 7 из модуля обработки сигналов расстояния В по первому выходу выдается сигнал увеличения на единицу адреса ячейки модуля памяти ММ 1. а по второму выходу сигнал опроса модуля входных регистров 2 и по третьему выходу - сигнал в модуль управления памятьюб для выработки сигнала СЗ на выбор микросхемы модуля памяти 4 и сигнала записи ИЖЕ (сигнал СБ/ШЕ. Модуль входных регистров 2 выполнен так. что сигналы от датчика глубины износа лоткатрубопровода и датчика прохождения задвижки запоминаются на отрезке пути Зп-т-Зп) и сбрасываются каждые лоз Км после их записи в модуль памяти мсигнэлы от датчиков угла наклона не фиксируются и поступают в модуль памяти 4 только в момент ваписи. т.е. после прохождения очередного отрезка пути. Но поскольку все устройство обладает инерционностью. а диа пааон срабатывании датчякаугла нЪАйл 6 иа расширен на 7 (например сигнал о накло 1274не 450 поступает при наклоне от 8 доПри получении по второму входу сигнала от модуля обработки сигнала расстояния В, модуль входных регистров 2 выдает на свои выходные шины данные о состоянии датчиков.Модуль формирования адреса 3 при получении от модуля обработки сигнала расстояния 8 сигнала об увеличении адреса ячейки на единицу. увеличивает адрес и выдает его на первые выходные шины(ММ 1). При достижении максимального адреса. соответствующего 2 Кбайт. т.е. значению 2047. происходит обнуление шины адреса и увеличение на единицу числа на вторых выходных шинах. соответствующих номеру корпуса микросхемы РР 1). Такаяособенность формирования номера ячейкиМ обусловлена устройством модуля памяти. который состоит из 26 корпусов микросхем с объемом каждого 2 Кбайт, Полный номер ячейки определяется по формуле М 2 О 47 РМ 1.2 где Р(0,25) номер корпуса М(1.2047) адрес ячейки внутри корпуса М номер ячейки модуля памяти 4, Модуль управления памятью 5 при пол учении сигнала ШЕ/СБ от модуля обработки сигнала расстояния 8 формирует сигнал выбора микросхемы (35 и сигнал записи ШЕ. По этим сигналам происходит запись данных. находящихся на третьем входе модуля памяти 4 по адресу. установленному на первом и втором выходе модуля формирования адреса (формула 1.2). . Модуль сброса 6 при запуске устройства в работе формирует 52247 импульса увеличения адреса, которые поступают со второго выхода модуля сброса 6 на второй вход модуля формирования адреса 3. и 52247 импульсов ШЕ/СЗ. поступающих с первого выхода модуля сброса б на первый вход модуля управления памятью 5. При этом во все 52247 ячеек модуля памяти 4 записываются нули. После этого модуль управления памятью 5 формирует на своем первом выходе сигнал сброса. приводящий модуль входных регистров 2 в исходное состояние. Этот сигнал формируется при работе устройства после завершения очередного цикла записи информации в модуль памяти 4. .- Модуль резервного питаТсия конструк тивно связан с модулем 4 и предназначендля сохранения информации при транспор тировке модуля памятид, после завершения пробега по трассе. к вьнчислительному центру для обработки данных. .Модуль адаптера связи 10 необходим для стыковки модуля памяти 4 с вычислительным средством для обработки данных. Конструктивно он подключается только при обработке информации и служит для передачи данных из модуля памяти 4 в ЭВМ. а также для передачи управляющих сигналов и сигналов адреса от ЭВМ к модулю памяти 4.Устройство для контроля внутренней поверхности трубопроводе содержащее подвижный узел. перемещающийся внутри трубопровода и снабженный электронными блоками. включающими модуль памяти. блок питания и датчик пройденного расстояния.отличающеесятем.чтооно дополнительно. снабжено модулем датчиковс БКЛЮЧЗЮЩИМ ДЭТЧИК ГЛубИНЫ ИЗНОСЗ лотка трубопровода. датчик прохождения задвияки и датчик наклона подвижного уэла ОТНОСИТЕЛЬНО вертикальной ОСЬ-д МОДУЛЕМ управления памятью. модулем формированых регистров и модулем обработки сигнала расстояния. причем модуль датчиков соединен-с первымвходом модуля входных регистров. выход которого соединен с третьим входом модуля памяти. первый выход модуля сброса соединен с первым входом моду ля управления памятью, а второй выходмодуля сброса соединен с вторым входом модуля формирования адреса первый входкоторого соединен с первым выходом моду ля обработки сигнала расстояния. второй выход модуля обработки сигнала расстояния соединен с вторым входом модуля входНЫХ регистров. ТРЕТИЙ ВЫХОД МОДУЛЯ обработки сигнала расстояния соединен со вторым входом модуля управления памятью. вход модуля обработки сигнала расстояния соединен с выходом датчика расстояниях первый выход модуля управления памятью соединен с третьим входом модуля входных регистров. а второй выход модуля управления памятью соединен с четвертым входом модуля памяти. первый выход модуля формирования адреса соединен с первым входом модуля памятца второйвъбгодмодуляйормирования адресзсоеди нен со вторым. входом модуля памяти.Составитель И. Литвин Верстка Казпатент, Исполнитель В.Я. Генкина Ответственный за выпуск Э.3.ФаИз 0 ва
МПК / Метки
МПК: F17D 5/00
Метки: устройство, контроля, поверхности, внутренней, трубопровода
Код ссылки
<a href="https://kz.patents.su/4-1274-ustrojjstvo-dlya-kontrolya-vnutrennejj-poverhnosti-truboprovoda.html" rel="bookmark" title="База патентов Казахстана">Устройство для контроля внутренней поверхности трубопровода</a>
Способ очистки внутренней поверхности труб от отложений
Номер патента: 250
Опубликовано: 30.12.1993
Авторы: Казжанова Рахима, Бектурганов Жаналы Султанович, Кусаиынов Каппас Кусаиынович
МПК: B08B 9/00
Метки: очистки, способ, труб, поверхности, отложений, внутренней
Формула / Реферат:
Изобретение относится к способам очистки трубчатых конструкций от различного рода отложений, образующихся на внутренней поверхности во время эксплуатации конструкций, и обеспечивает непрерывную очистку длинномерных труб и предотвращение повторного загрязнения за счет одновременной механической и гидроударной очистки. Поставленная цель достигается тем, что при вводе кабеля-электрода, выполненного в виде оголенной жилы высоковольтного кабеля с...
Устройство управления многофункциональным аппаратом для электрофизиотерапии
Номер предварительного патента: 131
Опубликовано: 20.12.1993
Авторы: Мамонтов Яков Яковлевич, Финк Владимир Николаевич, Саламатин Альберт Гергардович, Медведев Яков Вениаминович, Карлинский Мирон Владленович
МПК: A61N 1/08
Метки: управления, аппаратом, многофункциональным, устройство, электрофизиотерапии
Формула / Реферат:
Изобретение относится к медицинской технике и может быть использовано в приборах многофункциональной электрофизиотерапии. Для увеличения точности дозирования электрофизиотерапевтического воздействия путем повышения степени соответствия сигнала воздействия заданному сигналу в него введены соединенные последовательно цифровой процессор обработки аналоговых сигналов и преобразователь "напряжение-ток", выход которого подключен ко второму...
Способ контроля нагрева букс железнодорожного транспортного средства
Номер патента: 482
Опубликовано: 15.03.1994
Авторы: Яковлев Михаил Васильевич, Ситников Александр Петрович, Козюлин Лев Васильевич, Фирсов Александр Викторович, Юревич Борис Александрович
МПК: B61K 9/06
Метки: контроля, транспортного, средства, букс, железнодорожного, способ, нагрева
Формула / Реферат:
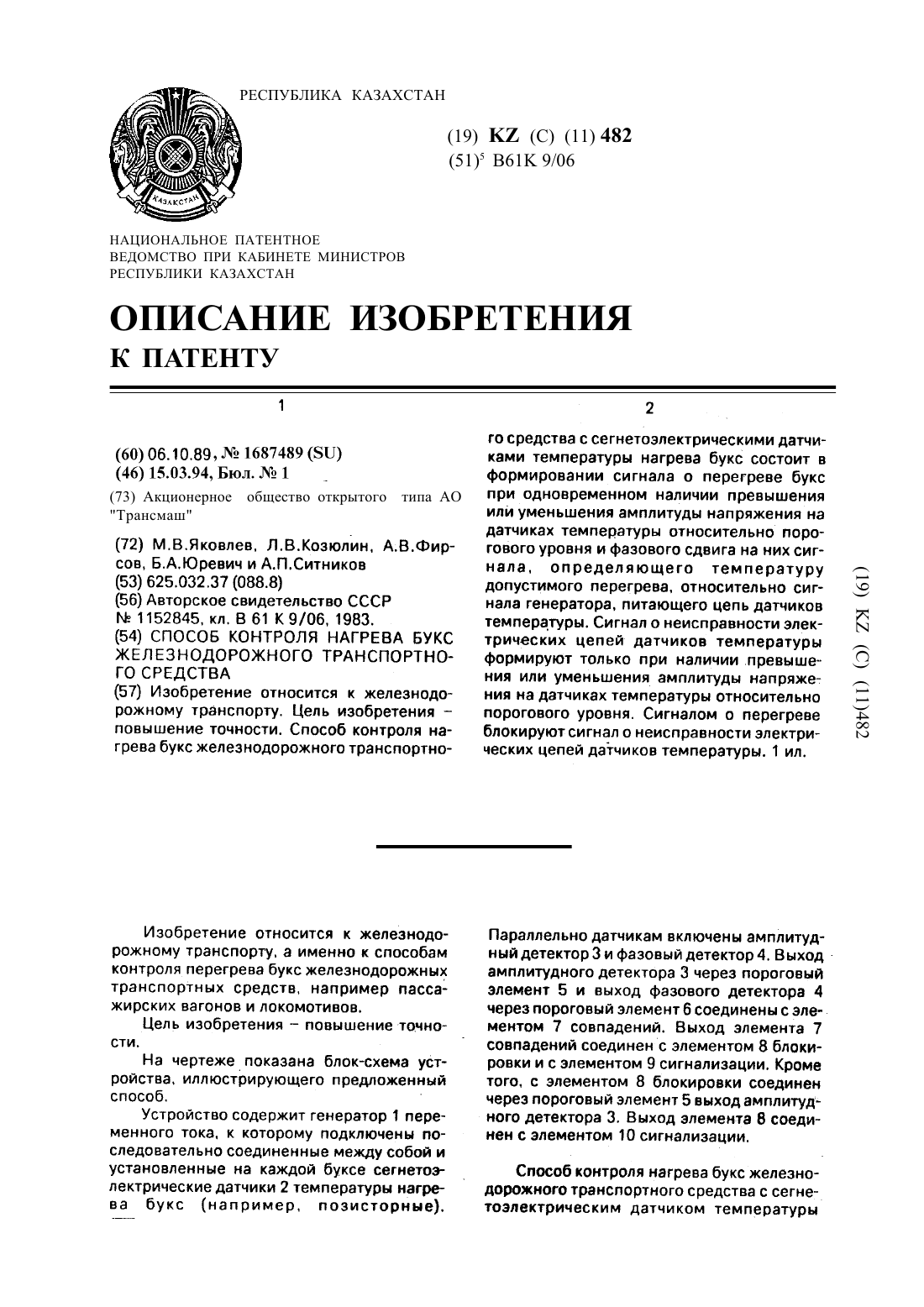
Изобретение относится к железнодорожному транспорту. Цель изобретения - повышение точности. Способ контроля нагрева букс железнодорожного транспортного средства с сегнетоэлектрическими датчиками температуры нагрева букс состоит в формировании сигнала о перегреве букс при одновременном наличии превышения или уменьшения амплитуды напряжения на датчиках температуры относительно порогового уровня и фазового сдвига на них сигнала, определяющего...
Устройство для контроля сопротивления изоляции движущегося кабельного изделия
Номер патента: 704
Опубликовано: 15.03.1994
Авторы: Лесных Ольга Ивановна, Чуганов Кабыльбек
МПК: G01R 31/12
Метки: изделия, движущегося, сопротивления, кабельного, устройство, изоляции, контроля
Формула / Реферат:
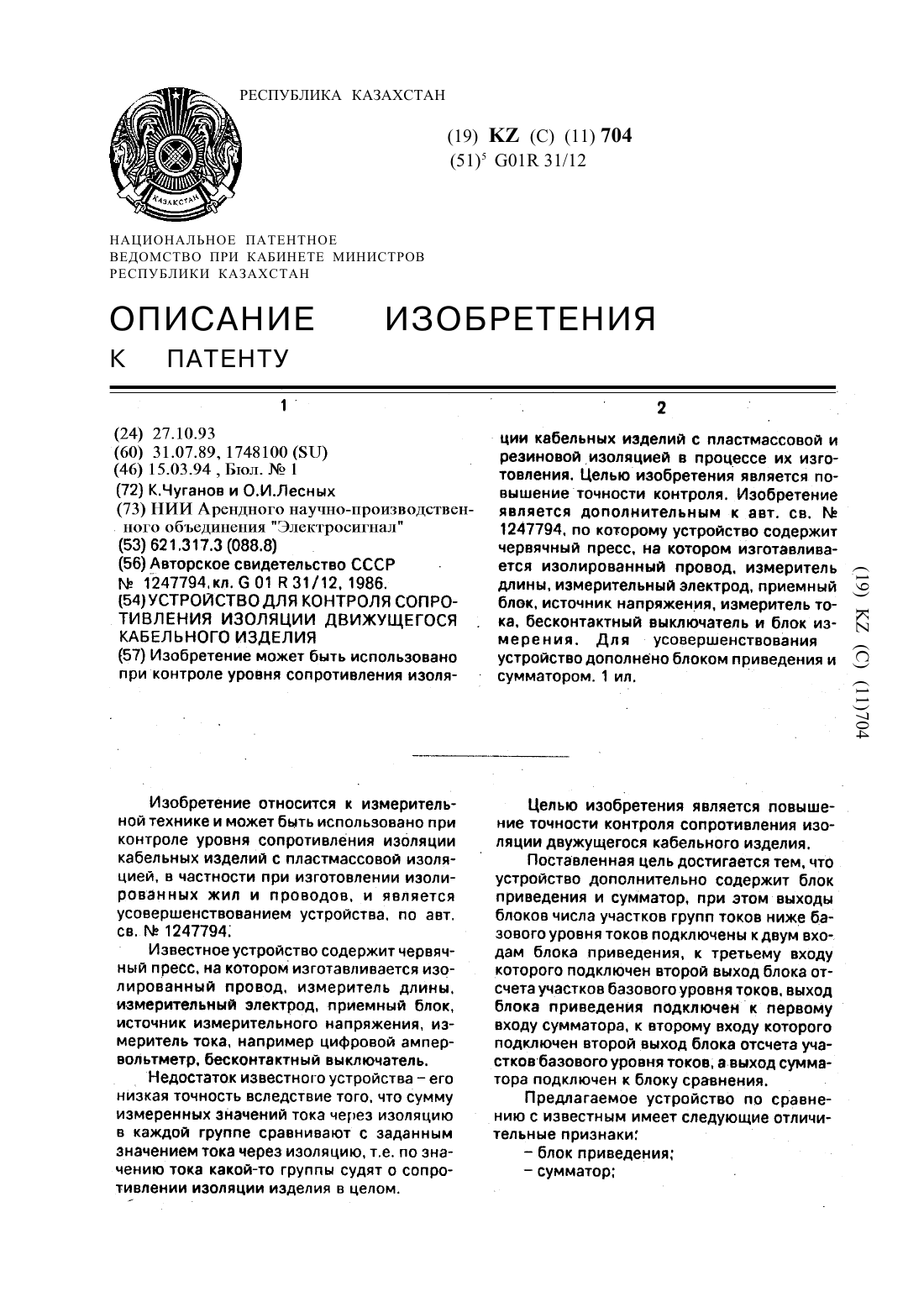
Изобретение может быть использовано при контроле уровня сопротивления изоляции кабельных изделий с пластмассовой и резиновой изоляцией в процессе их изготовления. Целью изобретения является повышение точности контроля. Изобретение является дополнительным к авт. св. № 1247794. по которому устройство содержит червячный пресс, на котором изготавливается изолированный провод, измеритель длины, измерительный электрод, приемный блок, источник...
Устройство для испытания электрической прочности изоляции проводов
Номер патента: 708
Опубликовано: 15.03.1994
Автор: Солодская Надежда Ивановна
МПК: G01R 31/14
Метки: прочности, устройство, электрической, проводов, испытания, изоляции
Формула / Реферат:
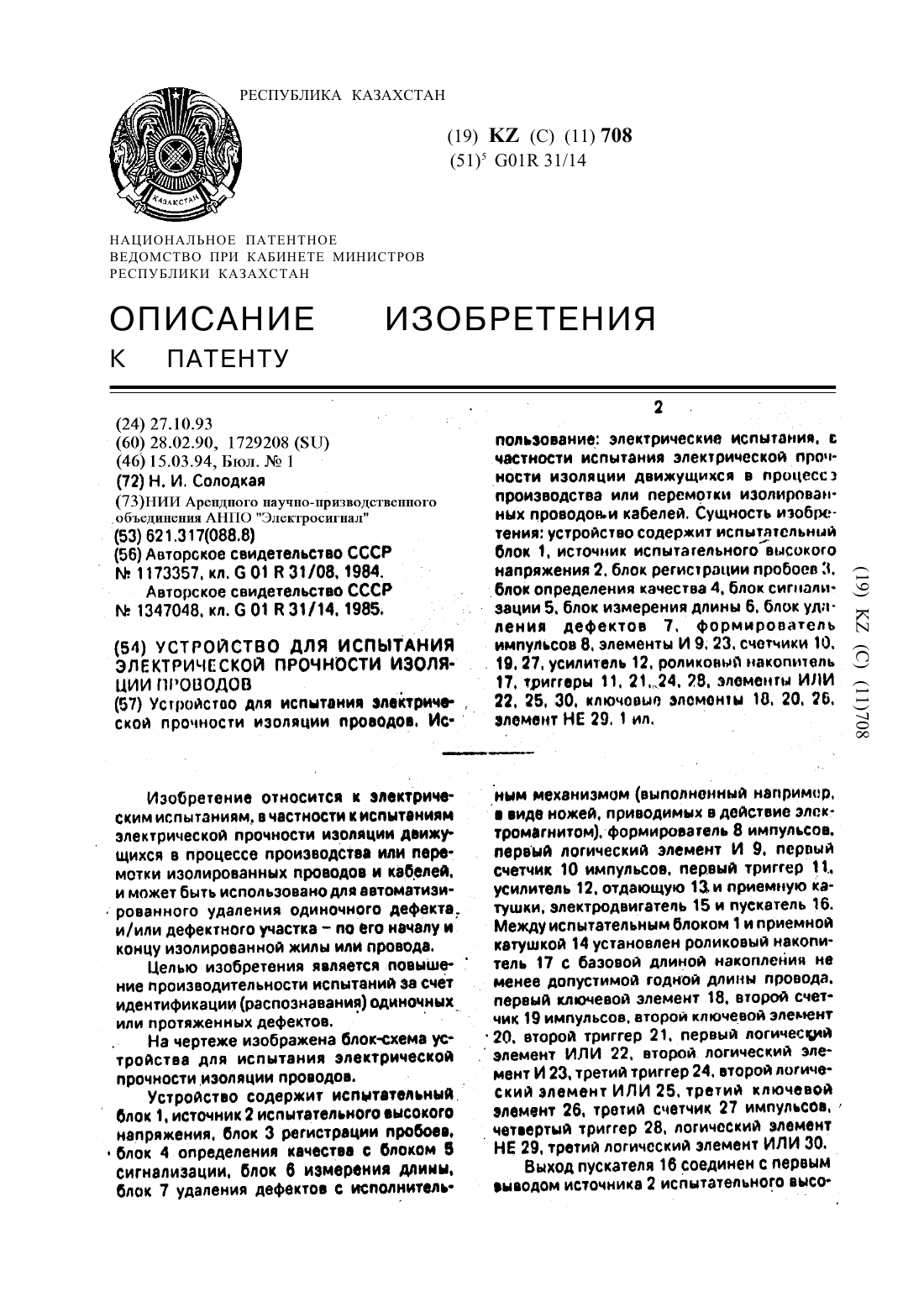
Устройство для испытания электрической прочности изоляции проводов. Использование: электрические испытания, с частности испытания электрической прочности изоляции движущихся в процесса производства или перемотки изолированных проводов и кабелей. Сущность изобретения: устройство содержит испытательный блок 1, источник испытательного высокого напряжения 2, блок регистрации пробоев 3, блок определения качества 4, блок сигнализации 5, блок измерения...
Предыдущий патент: Механизм для преобразования вращательного движения в возвратно-поступательное
Следующий патент: Вихревая форсунка
Случайный патент: Сейсмостойкий каркас здания