Способ сборки пространственных металлических конструкций , машина для его осуществления
Формула / Реферат
Использование: изобретение относится к способам сборки пространственных металлических конструкций, таких как панели и перекрытия, использующиеся в строительстве, кроме того, настоящее изобретение касается установки для осуществления этого способа и позволяет повысить качество. Сущность изобретения: предлагаемый способ сборки пространственных металлических конструкций включает следующие этапы, подготовку нескольких плоских сеток, содержащих продольные проволоки и их связки, сваренные вместе расположение сеток в соответствии с заданным поперечным шагом; выравнивание продольных проволок для образования соответствующих плоскостей конструкции: размещение по крайней мере одной поперечной проволоки в положении, в котором она пересекает продольные проволоки или связки других сеток в различных зонах пересечения упомянутых продольных проволок и связок соответственно достижение с помощью по крайней мере одного сварочного узла той зоны, где сетка пересекает связку, таким образом, что электроды упомянутого сварочного узла обращены к пересекающимся проволокам в зоне относительного пересечения; взаимодействие пересекающихся проволок и упомянутых электродов для осуществления сварки проволок в зоне пересечения, относительное перемещение сеток и упомянутого сварочного узла на расстояние, равное шагу поперечной проволоки и удерживание при этом связки в той же плоскости; повторение всех перечисленных операций для новой поперечной проволоки новой зоны пересечения до тех пор, пока продольные проволоки не будут приварены к продольным проволокам или связкам арматурной проволочной сетки.
Текст
Изобретение относится к способу сборки пространственных металлических конст рукций, например предварительнокрытий, использующихся в строительстве. Крометого. изобретение касается установки для осуществления этого способа.Известна ттространственная конструкция, которая состоит из нескольких плоских арматурныхсеток. Каждая такая сетка состоит по крайней мере из одной пары продольных проволок и связывающих провлок-стяжею Арматурная сетка имеет заранее определенные взаимные промежутки. обусловленные серией поперечных проволок, приваренных к самой арматурной сетке и к стяжкам. Такая конструкция обра. ЗУЗТ опорные ПЛОСКОСЙИ ДЛЯ ППОДОПГОВЗТЫХэлементов соответствующегоразмера. изготовленных иэ легкого изолирующего материала. которыйразмещается внутри конструкции. Изготовление таких конструкцийт. требует оченьжестких допусков для ВЗЗЛИЧНЫХ ЗПВМВНТОП И ТЩЭТВЛЬНОГО выравнивания упомянутых элементов во время сварки. Удовлетворение этих требований требует много ручного труда по подводу сварочных устройств ктем зонампересечения. где расположены привариваемые проволоки, и для сохранения гвыравненных частей.Такой способявляется дорогостоящимдБо лее того. очень трудно добиться одновременного выравнивания водной плоскостистяжек от различных частей конструкции Возникаетряд серьезных технических про блем при изготовлении таких конструкций,в частности это касается надежности сварки и большогодсопротивления статическим м динамическим напряжениемконструкциио Возникающие техническиеДлроблемы изобретение дьешаед судпоумощьюу 2 слособасборки.ткоторыйу является простым и отно сительно дешевыми позволяет собрать оченьоточную пространственную проволоч-нуюсеткуобладазощую бол ьшим сопротив лениемнапряжениюдуказзгнная проблема может быть решена супомощьтоспособа изо бретения,включающегоследующие Этапы подготовку нескольких 1 плоских сеток. 104(илистяжки), сваренные вместе расположе ние сеток всоответствии с заданным попе речным шагомавыравнивание сеток таким образом-чтобы связки различных сеток располагались в одной плоскости выравнивание продольных провопок по крайней мере с одной стороны сетки для образования соответствующих покрывающих плоскостей конструкции размещение по крайней мереОДНОЙ ПОПЕРЕЧНОЙ ПООВОПОКИ В ПОЛОЖЕНИИ.в котором она пересекает продольные про ч волоки или связки дРУгих сеток в различныхзонах пересечения упомянутых продольных проволок и связок соответственно достижение с помощью по крайней мере одногосварочного узла той зоны. где сетка пересе-Й кает связку. таким образом, что электроды уупомянутого сварочного узла обращены к ПЕРЗСЕКЗЮЩИМСЯ ППОВОПОКЭМ В зоне ОТНО СИТЭЛЬНОГО пересечения ВЗЭИМОДВЙСТВИС ПЭПЗСЕКЗЮЩИХСЯУПООВОЛОК И УПОМЯНУТЫХ электродов для осуществления сваркипроволок в упомянутой зоне пересечения Аотносительное перемещение сеток и упомянутого сварочногоузла на расстояние. рав ное щагу поперечной проволоки. удерживая .при этом связки в той же плоскости повто- ..рение мероприятий трех последних этапов для новойпоперечной проволоки новой зоны пересечения дотах пор. пока продоль ные проволоки не будут приварены к продольным проволокамили связкам арма турной проволочной сетки. .следующие этапы подготовку прямой проволоки сбарабанов. путем ее натяжения и одновременного скручивания проволок приготовление группы продольных проволок в выравнивающих дердькателях. которыеобеспечивают параллельное расположение у относительно друг друга приваривание всоответствующих пересекающихся точках продольных проволок к связкам так. что упо мянутые проволокирасполагаютсяпо суще- ствув той же плоскости, что и связки подачу и продольных пороволокотносительно упомя нутвх вырарнввющтгддепжгтелей на расстоя ниед ра зное ша гу. св эок г адл.обрааованиядследующейд драаметочной се к ции ранней по существу предьтдущей раз маточной секции установкувторойдсвязки таким образоълогчто. сонар лересекаети располагаетсяцрядом или взаимодействуетотчастиБс др 1 угойдразметочной 5 секцией упомянутых прододьяьгхэраспадется таким оаразьмдъттру-помя нутая связка располагаетсяу на точноуспределенномдрасстоянии от предыдущей связки сваривание упомянутой другой связки с продольными проволоками в соответствующих зонах пересечения повторение мероприятий первого и последнего этапов с т до п до техпор. пока не будут завершены все сварочные соединения на арматурной проволочной сетке. Пространственная конструкция, получаемая способом изобретения, обладает ЗЗМЭТНЫМ С 9 ПрОТИБЛеНИеМ напряжения благодаря скручиванию проволоки и точнойТОЧНОСТЫО ПЛОСКОСТВЙ ОЭЗЛИЧЙЫХ СВЯЗОКдля получения небольших пространств между продолговатыми элементами. которые вставляются внутрь самой конструкции. Более того. конструкция в сборе обладает высокой точностьюразмера. что гарантирует оптимальное размещение панелей при строительстве зданий. с .Другие детали и особенности изобрете ниястанут понятны из приводимого ниже подробного описания. которое проводится на примере и сопровождается ссылками на прилегаемые чертежи. . - -, На фиг. 1 приведен общий схематичный вид сборочных машин. использующихся для осуществления способа изобретения.на фиг 2 т вид в перспективе сборочной маши ны. показанной на фиг. 1 на фиг. 3 схематичный вид в плане машины показанной на фиг, 2 на Дфиг, 4 - вид сбоку машины-представленной на фиг. 3. врабочем состоянии на фиг. о 5- вид спереди деталей машины. представленной на фиг. 2 на фиг. 6 т показ заны некоторыеподробностирабочего процесса с фиг. 5 на фиг. 7 - вид сбоку деталей машины. показанной на фиг. 2 на фиг. 8 показаны подробностис фиг.с 7 во время работы на фиг. 9 - схематичный видрсечения. выполненного по линии А-А на фиг. 4 на фиг. 10 схематичный вид деталей машины. показанной на фиг 2 на фиг. 1.1 схе матичный вид другой детали от машины. показанной нафиг.2 на фиг. 12 вид в плане омодифисцированной детали машины.представленной на фиг. 2 на фиг. 13 т- схе Дматичный йодид сбоку гмодиф икации. предгставленноя нафип 12 ьтна фиг.ъъ 14 двид с деталеймзображенных нафиг 12. показан ных врабочемурежиме нафиг.15 фтехнологическая пооперационная схема машиныленадиаграмма всей Амашиньт показанной на фиг.2 насфиг.171 схематичный вид в с планедвторойгмашиныд представленной ъ в идсхематичныой вид сбокумафтдтн показаннойноа фиг. 17 на фиг 19 йблок-схемха машины покааантехнологического процесса в соответствии со способом настоящего изобретения.Предлагаемый способ сборки предназначен-для. изготовления. например (но не исключительно) пространственных металлических конструкций 1 (фиг. 2) такого типа.для сборки плоских арматурных проволоч 2769. предусматривает предпочтительно исполь зование машин. обеспечиваюкцих сборкупространственных конструкций. Арматурная проволочная сетка 2 содер жит продольные проволоки 5 и связки Б. иво время процесса. предшествующего сбор ке пространственной конструкции, они под- устройства 7 длярсварки в нижнем положе НИИ. Сборочная машина содержит несущуюподачу поперечных проволок 3. приварива емых к сетке 2. ряд сварочных устройств 10 и подающееустройство 11 для упомянутой конструкции 1 вовремя сборки и приемный узел 12. - Машина снабжена также электронным1 блокомоуправления 13 (фил. 1) для последо вательного управления различными сбороч т НЫМИ И сварочными ОПВПЗЦИЯМИ. ПУЛЬТОМи гидравлическое устройство 16 для охлаж дения сварочных электродов всборочныхс . Несущая конструкция 8 содержит вер тикальные стойки 17.лна которыхс равными в интервалами парами закреплены попереч ные балки 18. Последние в свою очередь. ных опорных поверхностей 19. Интервалымежду плоскостями 19 равный образуют поперечный шагссплоскихсеток 2 относи тельно уже собранной конструкции 1.Плоскости 19 о(фиг,3)имеют удлиненную прямоугольную форму сддвумя боковымивующую плоскую сетку 2. АДвыдавливанияи имеющую отсечении пря- ст 5 стороне 20 снабжен поверхностью управэления 23. взаимодействующей с концами связок 6 сеток 2. Поверхности 23 элементовуправления 21 с различных плоскостей 19 расположеныв одной плоскости и Образуютдля пространственной конструкции 1.- Другой элемент управления 24. изготов ленный-аналогично предыдущему и имею щийв сечении прямоугольную форму,регулируемо прикреплен к стороне 2-1 каж дой плоскости 19 и снабжен поверхностьюуправления 25. взаимодействующей с кон цами связок 6 сеток 2. Поверхности 25 элеплоскости и определяют другую вертикальную разметочную плоскость для пространственной конструкции 1, проходящую параллельно вертикальной плоскости. определенной поверхностями 23. Обе разме точные плоскости-выполнены так. чтобы разместить продольные проволоки 5 в од- . ной плоскости на одной стороне различных 5сдеток 2.и бопеедтого. они располагаются перпендикулярнобдплоскостям упомянутых сеток 2. . - вНаодном конце на передней части, как показано на фиг. 3, к элементу управления19. Упомянутые элементы взаимодействуют с концами связок б. атакже с продольными проволоками 5 от плоских сеток 2 и служат для точного определения вертикальных разметочных плоскостей конструкции 1, а также для предотвращения коробления сеток 2 в зоне. следующей за выходным концом направляющих элементов 26 и 27 рядом со сварочными устройствами 10.Элементы управления 25 и направляю щие элементы 27 перемещаются относительно боковых сторон 21. например. с помощью винтов 28 Таким образом. интервал между разметочными плоскостями поверхностей 25 и направляющими элементами 26 может изменяться относительно разметочной плоскости поверхности 23 либо относителвно направляющих элементов 27 для точного определения вертикальных- разметочных плоскостейток 2 различной ширины. . д Питающее устройство 9 разделено на два узларкаждыйиз которых содержит бун кер 29 (фиг 11). в котором расположены поперечные проволоки 3. Последние поддействием собственного веса поступают в выходной желоб 30. при этом их подача может быть облегчена установкой эксцентрика 31. Устройство 32 . обеспечивает падениепроволок 3 по одной, которые направляют ся наклоннымистержнями 33 и останавли В 8 ЮТСЯВ ИХ ОСНОВЗНИЙ В ООЗУЛЬТЗТЭвзаимодействия с буртиками 34 (фиг 3). Наличие проволоки 3 у буртика 34 определяется магнитным датчиком 35. который подает электрический сигнал. содержащий информацию для блока управления 13. . пМежду опорой 8 ибункерами 29 (фиг. З) установлены две захватывающие руки 36. каждая из которых. образована штангой, 2769имеэощей форму параллелепипеда. с опорной точкой на одном конце И выходным валом 37 пневматического приводного элемента 38. Последний служит для поворота захватывающей руки из горизонтального положения в вертикальное. Каждая захва тывающая рука 36, находясь в горизонталь-проволоку 3. которая в этот момент останов пена у буртиков 34 и рядом с соответствующей проволокой. Ряд магнитов 39 установлены таким образом. чтобы смещать проволоку З с буртиков 34 и удерживать ее на руке 36. выровненной с осью такой же руки. Указанное положение остается неизменным даже тогда, когда рука 36 находится в вертикальном положении. Кроме того,имеются два датчика 40 и 41. которые определяют соответственно горизонтальное и вертикальное положение руки 36 и передают информацию на блок управления 13.К бункеру 29 (фиг. 2 и 3) обращены два пневмоцилиндра 42. снабженные поршнями 43. перемещающимися в горизонтальной плоскости кв направлении,перпендикулярном разметочным ППОСКО стям поверхностей 23 и 24. К упомянутымствующихопорных блока 44. дк которым в СВОЮ очередьприкреплены двадругих пневмоцилиндра 45. Последние снабжены поршнями 46. которые перемещаются горизонтально под углом 45 относительно разметочных плоскостей поверхностей 23 и,24. На упомянутых поршнях 46 закреплены две стойки 47. на которых расположены два соответствующих пневмозажима 48, котот.- рые перемещают проволоку 3 в сторону отрук Зби удерживают их параллельно-отно сительно стоек 47. датчики 49 служат для определения наличия одной или нескольких проволок 3, удерживаемых зажимами 48,Опоры 44 могут смещаться в сторону от поршней 43 из положениядкогда они находятся сбоку рядом с бункерами. в центральные положения рядом со сварочными устройст вами 10 и направляющими элементами 26 и27. Стойки 47 в свою очередь могуттакже смещаться отпупомянутых поршней 46 изположений. удаленных от бункеров 29 и направляющих элементов 26 и 27. в зоны. находящиеся рядом с упомянутыми руками 36. расположенными в вертикальной плоскости. и со сварочными устройствами 10. Концевыедатчики 50 и 51 цилиндров 42 определяют соответственно боковое и центральное положения блоков 44. а концевые датчики 52 цилиндров 45 определяют положения стоек 47 рядом с руками 36 и сварочными устройствами 10. Упомянутыебункеры 29 выполнены так. что каждый из них может принимать с помощью соответст вующих разделительных элементов два ря-да поперечных проволок 3. длина которых чуть меньше. чем максимальная ширина самого бункера. Наклонные стержни 33 захватывающие руки 36, стойки 47. зажимы 48 и различные датчики могут одновременно манипулировать с двумя проволоками 3. выровненными одна с другой и следующими одна за другой. Это позволяет производить сборку одновременно двух пространствен ч ных конструкций. высота которых немногоменьшечем половина конструкции с максимальной высотой.Сварочные устройства 10 (фиг. 3) раздепены на две группы. которые соответственно смонтированы на двух плитах 54 и 55. Последние подвижно смонтированы на вертикальных стойках 56. расположенных слева и справа от направляющих элементов 26 и 27 так, чтобы каждая пара элементов 26 и 27 взаимодействовала с одной парой сварочных устройств 10.Каждое устройство 10 содержит корпус 57. имеющий форму полого параллелепипеда, в котором размещен трансформатор 58. пневмоцилиндр 59. подвижный электрод 60 и противолежащий электрод 61 (фиг. 10). Подвижный электрод 60 прикреплен к поршню 62 цилиндра 59. который направляется гильзами. изопирующими его от корпуса 57. Противолежащий или оппозитный электрод 61 имеет Ьобразную форму и электрически соединен с корпусом 57. Трансформатор 58 частично размещен в корпусе 57 параллелепипедной формы. и клеммы 63 первичнойобмотки трансформатора могут подсоеди няться к главной сети питания. Вторичная обмотка трансформатора снабжена двумя клеммами 64 и 65. соединенными с электросоединена с электродом 61. тогда как соединение между электродом 60 и клеммой 65ДОСТИГЗЭТСЯ С ПОМОЩЬЮ ряда ТОНКИХ МВДНЫХ-.щих перемещение поршня 62 относитель оно трансформатора 58.Активная частькаждого подвижного электрода 60 (фиг. 5). обозначена позицией 66. Имеет цилиндрическую форму и располагается выше относительно поршня 62. -при атом эта часть соединяется через блок 67. Активная часть от каждого электрода 61 обозначенная позицией 68. имеет форму паралелепипеда и выступает вверх с электрода 61. Внутри блоков 67. электродов 60 и 61 проходятохлаждающие каналы. снабженные неболь шими впускным и выпускным отверстиями 69 и 70.5 В нерабочем положении части 66 и 68. стями сеток 2 и каждая плита 54 и 55 верти кально перемещается относительно стоек 56. Исполнительный механизм 71 перемещает вверх сварочные устройства 10 для выравнивания частей 55 и 68 с плоскостями сеток 2. Более того, два концевых датчика 72 и 73 могут определять соответственно высокое и низкое положения упомянутого устройства 10. В другом варианте конструкции. показанном на Фиг. 12 и 13 сварочные устройства 10 смонтированы на двух неподвижных плитах 74. Каждый противолежащий электрод 75 снабжен плечом 76 и поворачивается вокруг гильзы 77 параллельно поршню 62. Активные части 66 упомянутых подвижных электродов 60 вы, ровнены с плоскостями различных сеток 2.тогда как активные части электродов 75 располагаются под упомянутыми плоскостями. Плечи 76 поворачиваются на одном вертикальном звене 78, которое прикреплено к пневмоцилиндру 79.Пневмоцилиндр 79 предназначен для поворота активных частей 66 с целью их выравнивания с плоскостями сеток 2. Датчики 72 и 73 определяют в этом случае соответствующие высокое и нижнее положения электродов 75. Подающее устройство 11 (фиг. 3 и 7) содержит пневмоцилиндр 80. снабженныйраллепьно упомянутым направляющим элементам 26 и 27.К поршням 81 прикреплен вертикальный шток 82. на котором закреплены Ь-образной формы рычаги 83 которые располагаются в пространствах. лежащих между плоскостями сеток 2. Рычаги 83 имеют продольную часть 84. лежащую в средней плоскости между вертикальными разметочными плоскостями образованными направляющими элементами 26 и 27.На каждой части 84 с помощью шарнира. 85 прикреплен зубчатый рычаг 86. которыйв основании снабжен передним зубом 87 и задним зубом 88. В состоянии покоя рычаг удерживается в горизонтальном положении под действием силы тяжести и от действия упора 89 упомянутой части 84. В передней части каждого зуба 87 и 88 имеется соответствуэощая вертикальная взаимодействующая кромка 90. а на задней их части г наклонная кромка 91. взаимодействующие кромки 90 зубьев 87 и 88 выровнены между ними в двух вертикальных плоскостях. расстояние между которыми немного шире(примерно на 1- мм для проволок от 0.607 мм). чем половина шага связок 6 и сеток 2.
МПК / Метки
МПК: B21F 27/10
Метки: металлических, сборки, машина, пространственных, конструкций, способ, осуществления
Код ссылки
<a href="https://kz.patents.su/15-2769-sposob-sborki-prostranstvennyh-metallicheskih-konstrukcijj-mashina-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Казахстана">Способ сборки пространственных металлических конструкций , машина для его осуществления</a>
Способ изготовления легких металлических конструкций
Номер предварительного патента: 15
Опубликовано: 10.12.1993
Автор: Ниеталиев Досмахамбет Асырович
МПК: E04C 3/04
Метки: конструкций, металлических, легких, способ, изготовления
Формула / Реферат:
Изобретение относится к строительству. Сущность изобретения заключается в том, что способ включает формирование, по меньшей мере, двух профилей холодной гибкой из тонкой металлической полосы с перфорацией, совмещение профилей, соединение их между собой точечной сваркой. Перфорацию образуют выштамповкой по всей поверхности металлической полосы с получением после гибки перфорации и на стенках, и на полках профилей. Профили совмещают с совпадением...
Способ поблочной разработки прочного грунта и землеройная машина для его осуществления
Номер патента: 2515
Опубликовано: 15.09.1995
Авторы: Цой Валерий Иванович, Парфенов Валерий Васильевич
МПК: E02F 5/30
Метки: разработки, поблочной, грунта, способ, осуществления, машина, прочного, землеройная
Формула / Реферат:
Изобретение относится к горной промышленности и может быть использовано для поблочной разработки прочных грунтов в строительстве. Цель изобретения - расширение диапазона использования продукта разработки и повышение ее экологического уровня. Способ включает вырезание блоков грунта путем нарезания в его массиве пересекающихся вертикальных или наклонных щелей и подрезных щелей, охват каждого блока специализированным приспособлением, перенос...
Способ изготовления полиграфической продукции и машина для его осуществления К.Н.Сыздыкова
Номер патента: 465
Опубликовано: 15.03.1994
Автор: Сыздыков Казбек Нугербекович
МПК: B41F 17/00
Метки: осуществления, способ, полиграфической, машина, к.н.сыздыкова, продукции, изготовления
Формула / Реферат:
Сущность изобретения: способ включает бумагоделательный процесс с формированием бумажных листов, процесс нанесения красок цветного изображения на печатную форму, процесс многокрасочной плоской печати и брошюровочно-переплетный процесс. Перед нанесением краски печатную форму нагревают до температуры испарения воды и затем покрывают водой. Печатный процесс совмещают с бумагоделательным и брошюровочно-переплетными процессами. Краски наносят с обеих...
Способ получения гребенных лент и гребнечесальная машина для его осуществления .
Номер патента: 2134
Опубликовано: 15.06.1995
Авторы: Кондратьев Геннадий Александрович, Штрахер Лев Ильич, Лебеденко Георгий Степанович, Шарыгин Сергей Иванович
МПК: D01G 19/04
Метки: осуществления, гребенных, получения, гребнечесальная, способ, машина, лент
Формула / Реферат:
Изобретение относится к области текстильной промышленности и может быть использовано приемущественно тонкогребенном прядении шерсти. Способ получения гребенных лент включает сложение продукта, продольное деление нагретым и сжатым воздухом на равные полосы, каждую из которых затем делят на h - полосок. Смещение полосок осуществляют путем объединения их в ленты. Способ осуществляется на гребнечесальной машине, в узле питания которой выполнены...
Машина для роликовой сварки контактной проволокой
Номер патента: 1179
Опубликовано: 15.09.1994
Автор: Вернер Урех
МПК: B23K 11/06
Метки: контактной, проволокой, сварки, машина, роликовой
Формула / Реферат:
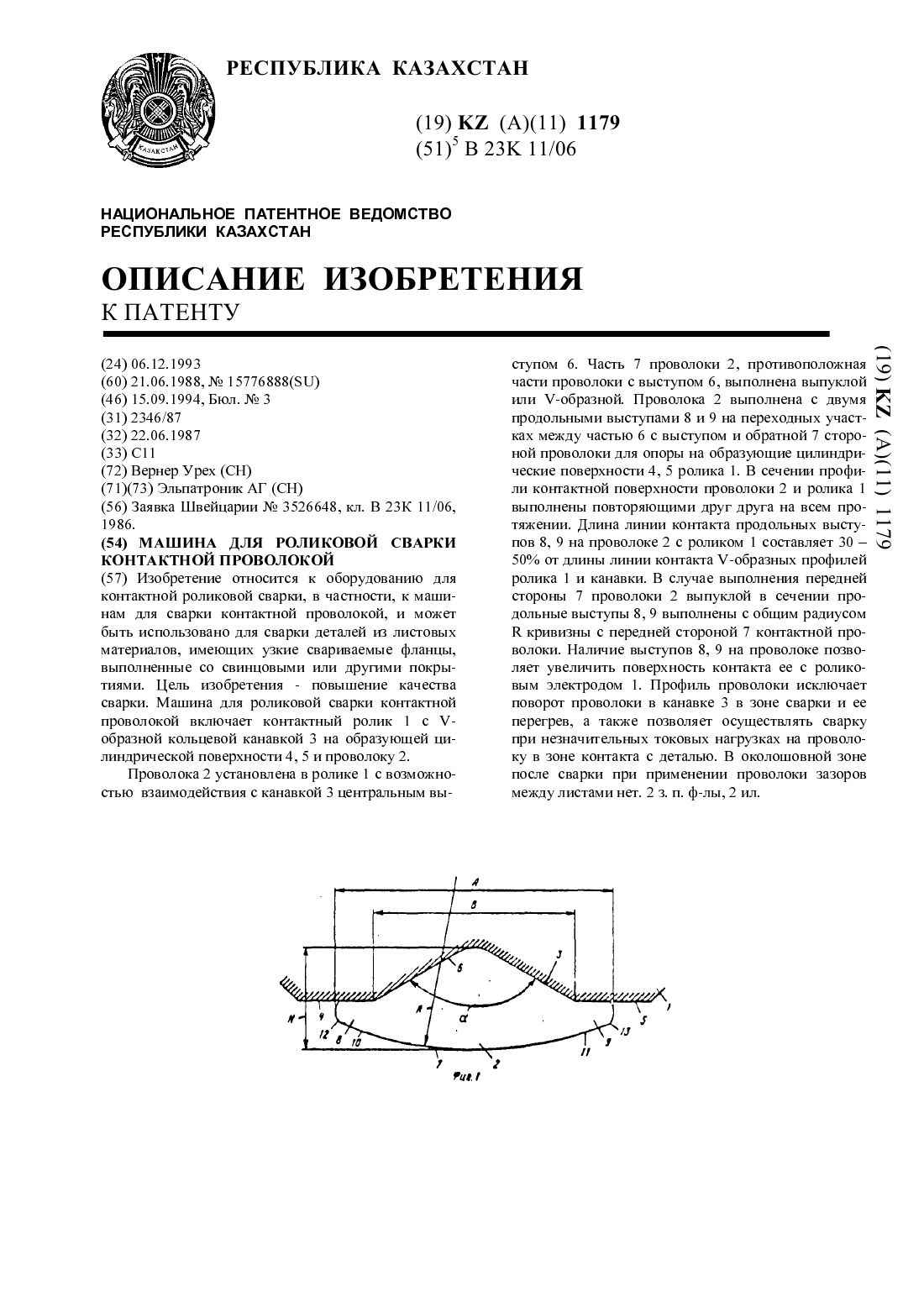
Изобретение относится к оборудованию для контактной роликовой сварки, в частности, к машинам для сварки контактной проволокой, и может быть использовано для сварки деталей из листовых материалов, имеющих узкие свариваемые фланцы, выполненные со свинцовыми или другими покрытиями. Цель изобретения - повышение качества сварки. Машина для роликовой сварки контактной проволокой включает контактный ролик 1 с V-образной кольцевой канавкой 3 на...
Предыдущий патент: Способ намотки полосы на барабан моталки стана холодной прокатки
Следующий патент: Жидкоподвижная смесь для изготовления литейных форм и стержней
Случайный патент: Пресс-форма для центробежного рабочего колеса, вставки для пресс-формы и способ изготовления центробежного рабочего колеса