Безтопливный двигатель «ЗИК»
Формула / Реферат
РЕФЕРЕРАТ ИЗОБРЕТЕНИЯ.
БЕЗТОПЛИВНЫЙ ДВИГАТЕЛЬ «ЗИК».
Изобретение относится к области машиностроения, в частности к двигателям, предназначенным для получения постоянного крутящего момента вращательного движения за счёт использования возобновляемых экологически чистых источников энергии (без использования топлива), в данном случае - постоянно действующей силы тяжести массы груза. Областью применения изобретения может быть получение электрической и механической энергии для обеспечения жизнедеятельности человека. Например, для получения электроэнергии, а так же обеспечения работы механизмов и агрегатов, необходимых для ведения хозяйства, где необходим не дорогой но постоянный, независимый, надежный и простой в эксплуатации источник энергии.
Наиболее близким аналогом к изобретению являются двигатели, например водяное колесо, простейший гидравлический двигатель, приводимый в действие энергией потока воды («Большая советская энциклопедия», издание III, 1969-1978 г.г.), которая оказывает давление на водяное колесо с лопастями, прикрепленными к спицам, а они к горизонтальному валу, и приводит их во вращательное движение. Вращательное движение через вал передается механизмам, выполняющим ту или иную работу. В современном варианте это гидроэлектростанции и подобные гидросооружения, которые служат для получения электрической энергии, обеспечения работы механизмов и агрегатов с дальнейшим использованием их по назначению.
Однако такие двигатели использующие энергию воды обладают рядом основных недостатков. Например: не везде существует источник воды и/или рельеф местности для организации накопления и набора необходимой высоты; большой объем работ при необходимости строительства дамбы, при этом затопляются земельные участки, меняется ландшафт местности и экосистема; большие габаритные размеры сооружений.
В настоящее время технический прогресс достиг очень высокого уровня и меры принимаемые по техническому усовершенствованию процесса строительства и эксплуатации имеют некоторый успех, однако они коренным образом не решают основных проблемных вопросов, которые влияют на увеличение финансовых затрат и в целом снижают экономическую эффективность таких двигательных установок.
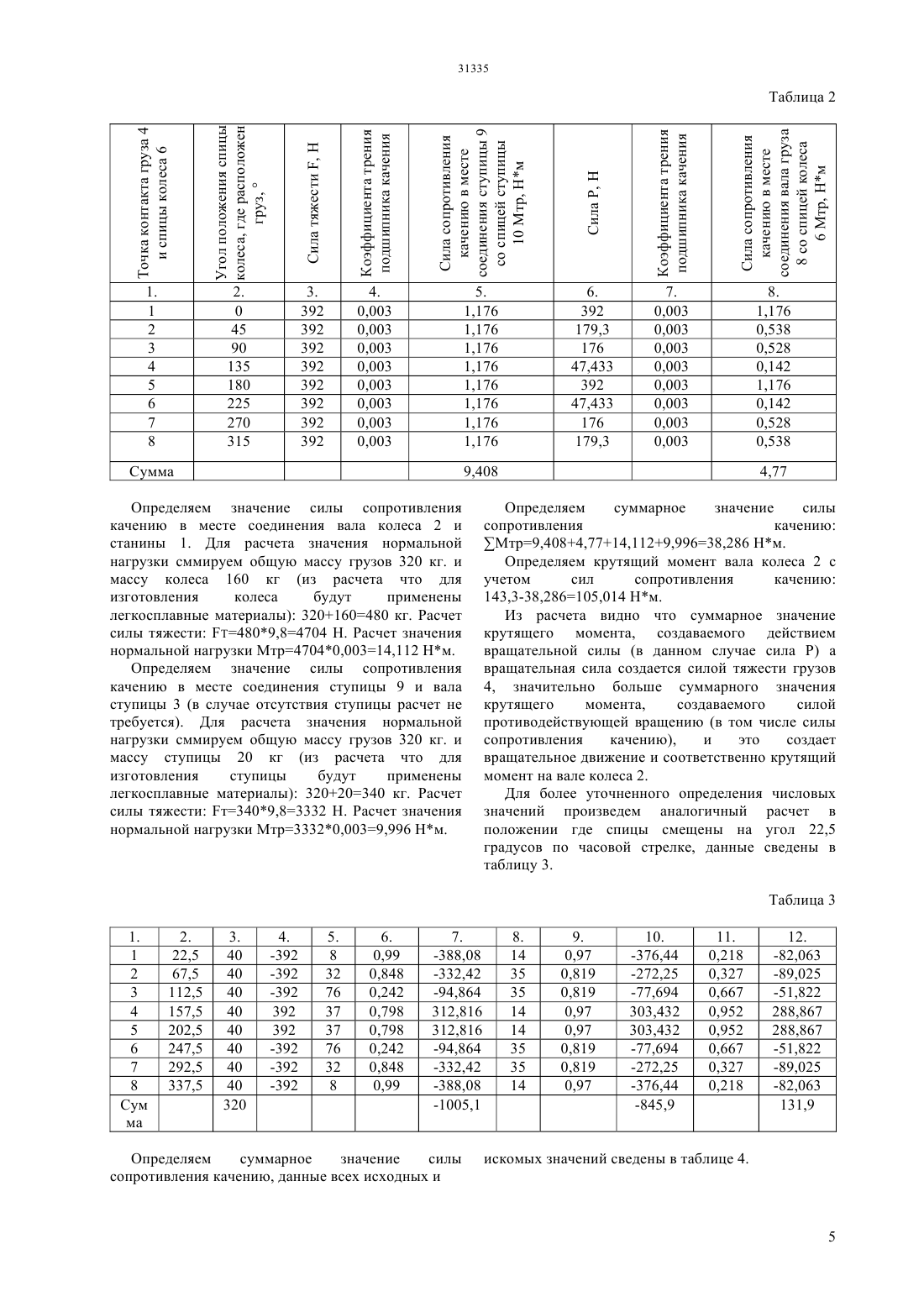
Двигатель, представленный в изобретении предназначен для получения постоянного крутящего момента вращательного движения, за счёт использования постоянно действующей силы тяжести груза, отличающийся тем, что для получения технического результата используется кинематическая схема двигателя, где обеспечивается траектория движения одинаковых по весу грузов в плоскости внутри окружности колеса на разных изменяющихся расстояниях от центра колеса, совершающих возвратно -поступательные движения по направлению от центра к внешней окружности колеса и обратно по спицам колеса, равноудаленным между собой под одинаковыми углами, и одновременно двигаются по траектории близкой к окружности, центр которого смещен относительно центра окружности колеса таким образом, что суммарное значение действия крутящего момента, создаваемого действием вращательной силы а вращательная сила создается силой тяжести грузов, оказывается больше суммарного значения крутящего момента, создаваемого силой противодействующей вращению, и это создает вращательное движение и соответственно крутящий момент на вале колеса. Чем больше окружность рабочего колеса и/или масса грузов, тем больше крутящий момент.
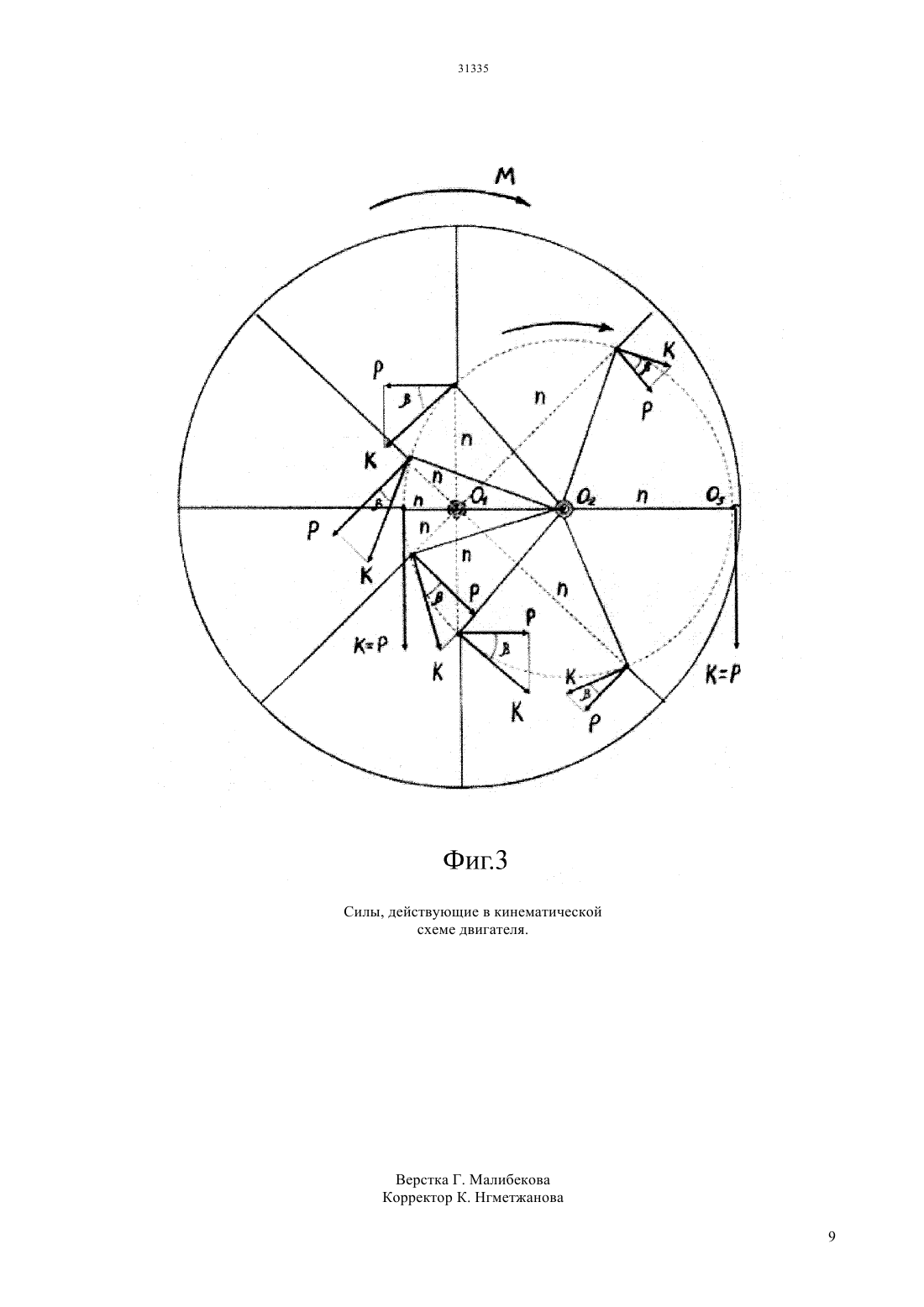
Сущность изобретения поясняются фигурами чертежей, где на фигуре 1 приведена кинематическая схема двигателя, на фигурах 2 и 3 приведены силы, действующие в кинематической схеме двигателя.
Кинематическая схема двигателя представлена на фигуре чертежа 1, содержащей следующие элементы.
Станина 1, установленная на ровной горизонтальной поверхности имеет два места где устанавливается вал колеса 2 с осью О1 и вал ступицы 3 с осью 02. Оси O1 и O2 параллельны между собой, находятся в положении параллельной горизонтальной плоскости на заданной высоте от основания станины 1 в зависимости от диаметра колеса, на заданном расстоянии между собой в зависимости от траектории близкой к окружности вращения груза 4 относительно оси O2.
Вал колеса 2 соединяется со станиной 1 таким образом, чтобы обеспечивалось вращательное движение вала 2. Вал 2 соединяется с колесом жестким зацеплением, ось вала 2 и центр окружности колеса совпадают.
Колесо состоит из внутреннего обода 5, спицы колеса 6 и внешнего обода 7. Диаметр внешней окружности колеса зависит от длинны спицы колеса 6. Количество спиц 6 совпадает с количеством грузов 4 и находятся в жестком соединении с внутренним ободом колеса 5 с одной стороны и внешним ободом 7 с другой стороны, равноудалены и имеют одинаковый угол между собой. Спицы колеса 6 имеют одинаковые вес и форму, и исполнены таким образом что в соединении с валом груза 8 обеспечивают возвратно - поступательное движение груза 4 по длине спицы колеса 6.
Ступица 9 соединяется с валом ступицы 3 таким образом, чтобы обеспечивалось вращательное движение ступицы 9 вокруг оси O2, ось вала 3 и центр окружности ступицы 9 совпадают. По внешней окружности ступица 9 имеет равноудаленные между собой места соединения со спицами ступицы 10, обеспечивающие в месте соединения вращательную подвижность в плоскости окружности ступицы 9.
Спицы ступицы 10, в количестве равном количеству грузов 4, исполнены таким образом что в сочлененном состоянии с грузами имеют одинаковый вес и обеспечивают движение грузов 4 по заданной траектории близкой к окружности с центром 02.
Грузы 4 имеют одинаковый вес (массу) в сочлененном состоянии со спицей ступицы 10, и соединяются таким образом, что ось вращения Оз груза 4 параллельна осям О1 и O2, одна сторона груза 4 по оси Оз соединена со спицей колеса 6, другая сторона со спицей ступицы 10 и обеспечивают заданные условия движения. В месте соединения груза 4 со ступицей колеса 6 обеспечивается возвратно - поступательное движение груза по длине спицы колеса 6 перпендикулярно относительно оси O1 и одновременно груз движется по траектории окружности с изменяющимся радиусом относительно оси O1. В месте соединения груза 4 со спицей ступицы 10 груз движется по траектории близкой к окружности с центром O2.
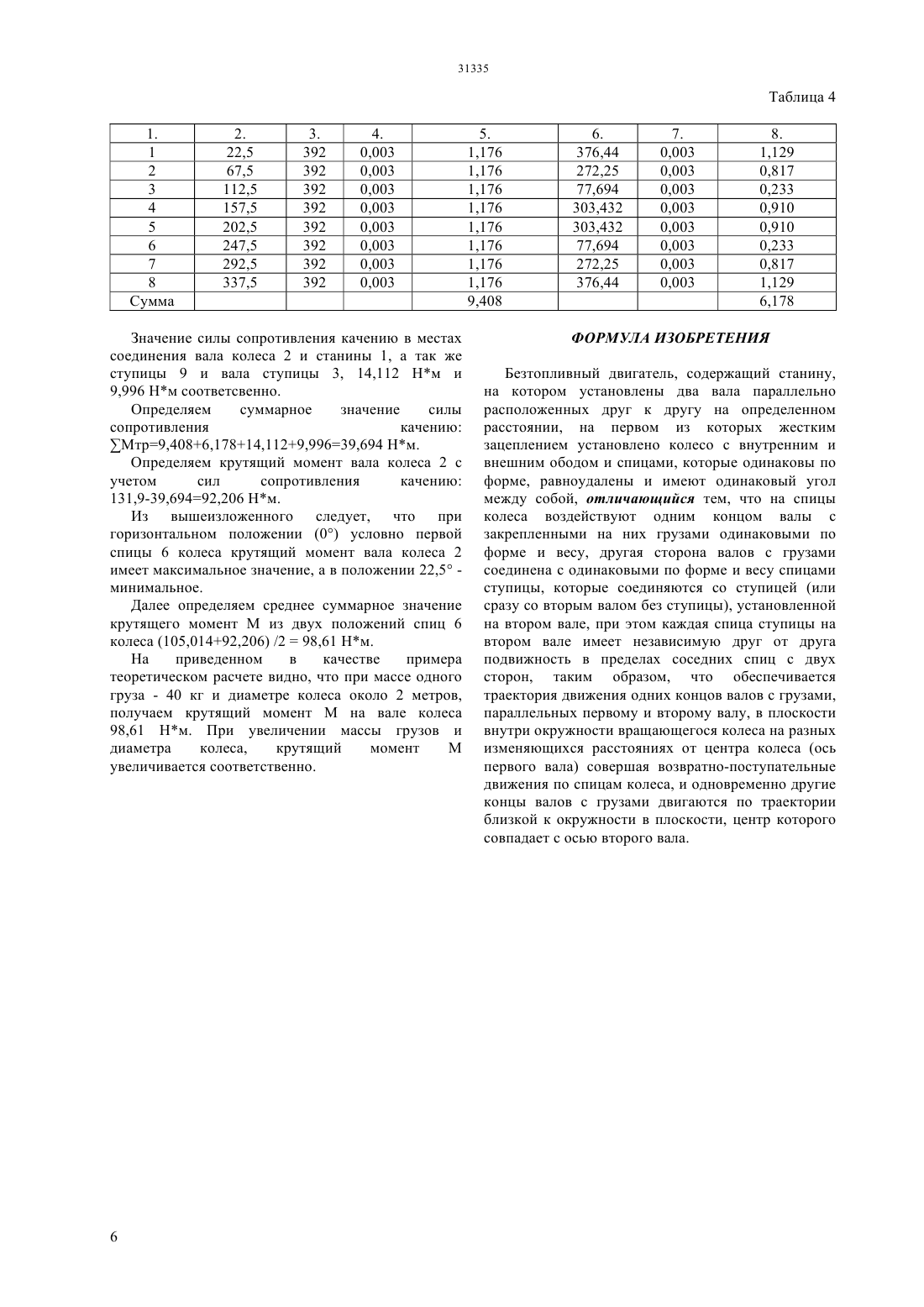
Предлагаемый изобретением двигатель работает следующим образом. Силы, действующие в кинематической схеме двигателя, изображены на фигуре 2 и 3.
Груз 4 массой m воздействует в месте соединения со спицей ступицы 10 с силой тяжести F (см. фиг. 2), которая расчитывается по формуле:
F= m*g 1
где m - масса груза;
g - ускорение свободного падения равное 9,8.
Сила F всегда направлена вниз перпендикулярно горизонтальной поверхности земли. При по часовой стрелке принимаем, что сила F в секторе от 90 до 270 градусов по траектории движения близкой к окружности с центром O2 является положительной, способствующей вращению, а в остальном секторе - является отрицательной, противодействующей вращению. Учитывая что спица ступицы 10 обеспечивает движение груза 4 только по траектории близкой к окружности с центром O2 то сила F в месте соединения спицы ступицы 10 и груза 4 создает силу К (см. фиг. 2) действующей по касательной перпендикулярно радиусу этой окружности, которая создает вращательное движение.. Сила К расчитывается по формуле:
К = F* cosa
где a - угол между действующей силой F и К.
Так как сила К действует по всей оси Оз груза 4, то в месте соединения (контакта) груза со спицей колеса 6 проекция дествующей силы К создает силу Р (см. фиг. 3), которая направлена по касательной линии к окружности с центром оси O1 и перпендикулярна радиусу этой окружности, на которой в данный момент находится груз 4, и создает вращательное движение колеса.. Сила Р расчитывается по формуле:
Р = К* cosp
где (3 - угол между действующей силой К и Р.
Крутящий момент М (см. фиг. 3), который создает сила Р на вале колеса 2, расчитывается по формуле:
М = Р*n
где n - плечо силы, растояние от центра окружности оси O1 до места воздействия силы Р, в которой на данный момент находится точка контакта груза 4 со спицей колеса 6.
Таким образом, достигается технический результат, при котором суммарное значение действия крутящего момента, создаваемого действием вращательной силы а вращательная сила создается силой тяжести грузов, оказывается больше суммарного значения крутящего момента, создаваемого силой противодействующей вращению, и это создает вращательное движение и соответственно крутящий момент на вале колеса.
Текст
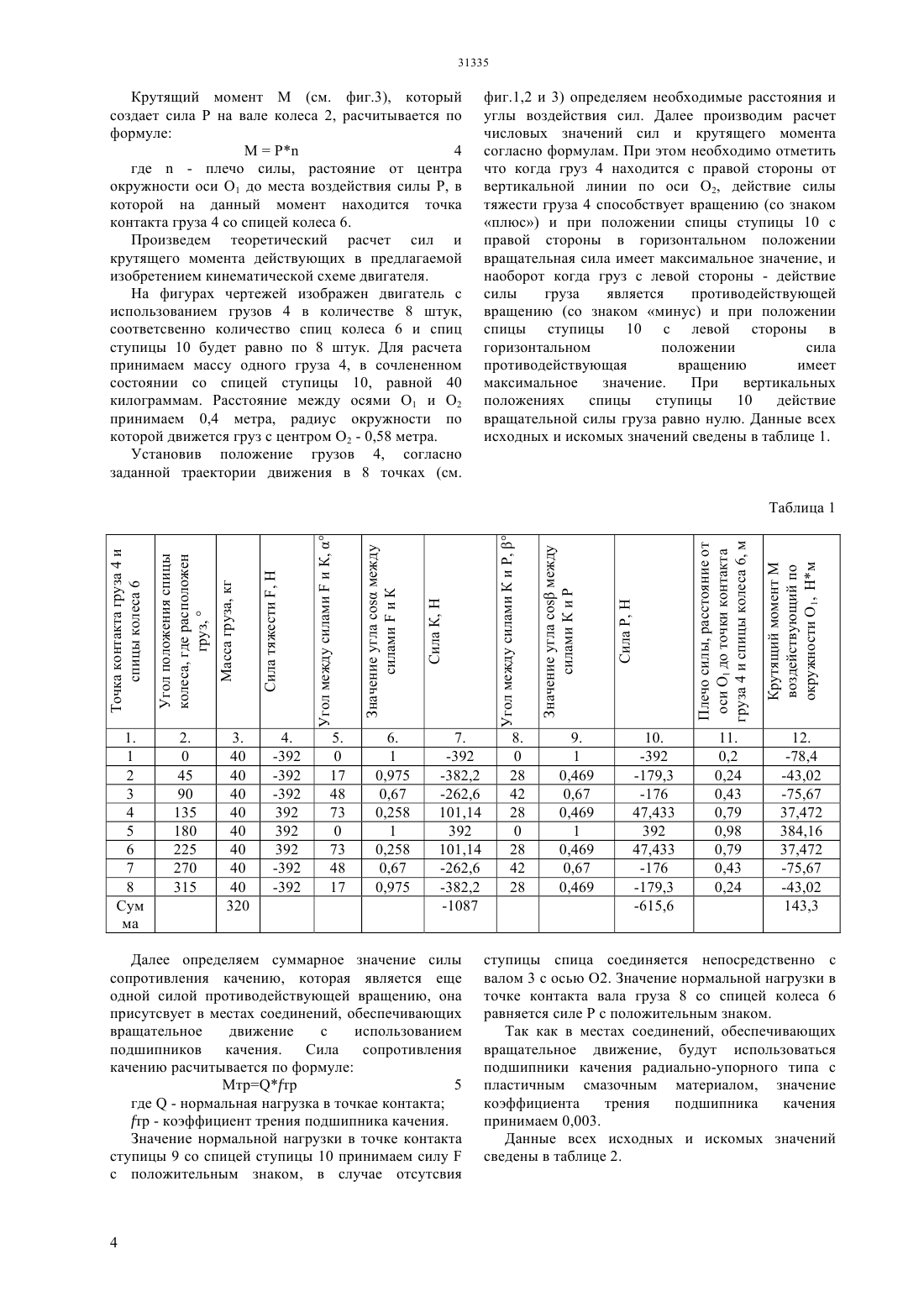
(51) 03 3/00 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ 2015/0081.1 21.01.2015 15.07.2016, бюл. 7 Зикибаев Руслан Аманжолович 2059882 1, 10.05.19962025575 1, 30.12.19942047000 1, 27.10.19952002070893 1, 12.09.2002(57) Изобретение относится к области машиностроения, к двигателям предназначенным для получения крутящего момента за счт использования возобновляемых экологически чистых источников энергии - силы тяжести массы груза, отличающийся тем, что для получения технического результата используется кинематическая схема двигателя,где обеспечивается траектория движения одинаковых по весу грузов в плоскости внутри окружности колеса на разных изменяющихся расстояниях от центра колеса, совершающих возвратно поступательные движения по спицам колеса от центра к внешней окружности и обратно, и одновременно двигаются по траектории близкой к окружности, центр которого смещен относительно центра окружности колеса таким образом, что суммарное положительное значение действия крутящего момента, создаваемого действием вращательной силы а вращательная сила создается силой тяжести грузов, оказывается больше суммарного значения крутящего момента,создаваемого силой противодействующей вращению, и это создает вращательное движение и соответственно крутящий момент на вале колеса. Сущность изобретения поясняются фигурами чертежей, где на фиг.1 приведена кинематическая схема двигателя, на фиг.2 и 3 приведены силы,действующие в кинематической схеме двигателя. Станина 1 (см. фиг.1), установленная на ровной горизонтальной поверхности имеет два места где устанавливается вал колеса 2 с осью 1 и вал ступицы 3 с осью 2, параллельных между собой, на заданном расстоянии в зависимости от траектории вращения груза 4 относительно оси 2. Колесо состоит из внутреннего обода 5, спицы колеса 6 и внешнего обода 7. Спицы колеса 6 в соединении с валом груза 8 обеспечивают возвратно поступательное движение груза 4. Ступица 9 соединяется с валом ступицы 3. По внешней окружности к ступице 9 прикреплены спицы ступицы 10. Предлагаемый изобретением двигатель работает следующим образом. Груз 4 своей массой воздействует в месте соединения со спицей ступицы 10 с силой тяжести(см. фиг.2), которая направлена вниз. В секторе от 90 до 270 градусов силаявляется положительной,способствующей вращению, а в остальном является отрицательной,противодействующей вращению. Спица ступицы 10 обеспечивает движение груза 4 по траектории окружности с центром 2 и силасоздает силу К (см. фиг.2),действующей по касательной перпендикулярно радиусу этой окружности. Сила К действует по всей оси О 3 вала 8, и на колесе 6 проекция дествующей силы К создает силу Р (см. фиг.3), действующей по касательной перпендикулярно радиусу с центром оси 1 и создает вращательное движение колеса и крутящий момент М (см. фиг.3) на вале колеса 2. Таким образом, достигается технический результат, при котором суммарное положительное значение действия крутящего момента,создаваемого действием вращательной силы оказывается больше суммарного значения крутящего момента,создаваемого силой противодействующей вращению, и это создает вращательное движение и соответственно крутящий момент на вале колеса. Изобретение относится к области машиностроения, в частности к двигателям,предназначенным для получения постоянного крутящего момента вращательного движения за счт использования возобновляемых экологически чистых источников энергии (без использования топлива), в данном случае - постоянно действующей силы тяжести массы груза, с целью использования его полезного действия. Областью применения изобретения может быть получение электрической и механической энергии для обеспечения жизнедеятельности человека без приобретения электричества от внешних источников и без использования традиционных видов топлива. Например, для получения электроэнергии, а так же обеспечения работы механизмов и агрегатов, необходимых для индивидуального домостроения,на производственных площадках малого и среднего бизнеса,а так же во многих сферах жизнедеятельности человека и ведения хозяйства,где необходим не дорогой но постоянный,независимый, надежный и простой в эксплуатации источник энергии. Известны двигатели,использующие возобновляемые, экологически чистые источники энергии - силу тяжести стекающей вниз воды или силу ветра. Наиболее близкой к изобретению являются двигатель - водяное колесо, простейший гидравлический двигатель, приводимый в действие энергией потока воды (Большая советская энциклопедия, издание , 1969- 1978 г.г.), которая оказывает давление на водяное колесо с лопастями,прикрепленными к спицам, а они к горизонтальному валу, и приводит их во вращательное движение. Вращательное движение через вал передается механизмам, выполняющим ту или иную работу. В современном варианте это гидроэлектростанции и подобные гидросооружения, которые служат для получения электрической энергии, обеспечения работы механизмов и агрегатов с дальнейшим использованием их по назначению. Однако такие двигатели использующие энергию воды обладают рядом основных недостатков, из-за которых их монтаж и применение крайне ограничено. Например не везде существует источник воды и/или рельеф местности для организации накопления и набора необходимой высоты, для обеспечения кинетической энергией массу воды большой объем работ при необходимости строительства дамбы, при этом затопляются земельные участки, меняется ландшафт местности и экосистема большие габаритные размеры двигателя и сопутствующих сооружений. При монтаже и дальнейшей эксплуатации таких двигателей приходится учитывать указанные недостатки. В том числе географическое расположение и климатические условия оснащение механизмами, обеспечивающими регулирование объема и потока воды защита механизмов и деталей от негативных условий эксплуатации большие размеры объектов. Все это приводит к значительным расходам при монтаже, техническом обслуживании и ремонте. В настоящее время технический прогресс достиг очень высокого уровня и меры принимаемые по техническому усовершенствованию для снижения степени негативного воздействия указанных недостатков имеют некоторый успех, однако они коренным образом не решают основных проблемных недостатков, которые влияют на увеличение финансовых затрат и в целом снижают экономическую эффективность таких двигательных установок. Задачей изобретения является разработка кинематической схемы двигателя, техническим результатом которого является получение постоянного крутящего момента вращательного движения за счт использования возобновляемых экологически чистых источников энергии (без использования топлива), в данном случае постоянно действующей силы тяжести массы груза,с целью использования его полезного действия. Сущность изобретения заключается в том, что кинематическая схема предлагаемого двигателя обеспечивает траекторию движения одинаковых по весу грузов в плоскости внутри окружности колеса на разных изменяющихся расстояниях от центра колеса и одновременно по траектории близкой к окружности, центр которого смещен относительно центра окружности колеса, таким образом, что суммарное значение действия крутящего момента,создаваемого действием вращательной силы а вращательная сила создается силой тяжести грузов,оказывается больше суммарного значения крутящего момента,создаваемого силой противодействующей вращению, и это создает вращательное движение и соответственно крутящий момент на вале расположенного в центре колеса. В плоскости окружности колеса грузы совершают возвратно - поступательные движения по направлению от центра к внешней окружности колеса и обратно по спицам колеса,равноудаленным между собой под одинаковыми углами, и одновременно двигаются по траектории близкой к окружности, центр которого смещен относительно центра окружности колеса, при этом нет жесткой привязки и фиксированного расстояния между грузами. Чем больше окружность рабочего колеса и/или масса грузов, тем больше крутящий момент. Сущность изобретения и признаки,обеспечивающие технический результат поясняются фигурами чертежей, где на фиг.1 приведена кинематическая схема двигателя, основной вид и вид сверху, на фиг.2 и 3 приведены силы,действующие в кинематической схеме двигателя. Возможность осуществления изобретения приводится в нижеследующем описании кинематической схемы его конструкции и способе его работы. Кинематическая схема двигателя представлена на фигуре чертежа 1, содержащей следующие элементы. Станина 1,установленная на ровной горизонтальной поверхности имеет два места где устанавливается вал колеса 2 с осью 1 и вал ступицы 3 с осью 2. Оси 1 и 2 параллельны между собой, находятся в положении параллельной горизонтальной плоскости на заданной высоте от основания станины 1 в зависимости от диаметра колеса, на заданном расстоянии между собой в зависимости от траектории близкой к окружности вращения груза 4 относительно оси 2. Вал колеса 2 соединяется со станиной 1 таким образом, чтобы обеспечивалось вращательное движение вала 2. Вал 2 соединяется с колесом жестким зацеплением, ось вала 2 и центр окружности колеса совпадают. Колесо состоит из внутреннего обода 5, который соединяется с валом 2 жестким зацеплением, спицы колеса 6 и внешнего обода 7. Диаметр внешней окружности колеса зависит от длинны спицы колеса 6. Количество спиц колеса 6 совпадает с количеством грузов 4 и находятся в жестком соединении с внутренним ободом колеса 5 с одной стороны и внешним ободом 7 с другой стороны,равноудалены и имеют одинаковый угол между собой. Спицы колеса 6 имеют одинаковые вес и форму, и исполнены таким образом что в соединении с грузом 4 обеспечивают возвратно поступательное движение груза 4 по длине спицы колеса 6. В данном случае на фигуре чертежа 1 изображен груз 4 соединенный со спицей колеса 6 посредством вала груза 8, ось О 3 которой совпадает с осью вращения груза, перпендикулярна спице колеса 6 и параллельна оси 1 вала колеса 2, но возможны другие варианты исполнения при условии обеспечения заданных параметров движения. Ступица 9 соединяется с валом ступицы 3 таким образом, чтобы обеспечивалось вращательное движение ступицы 9 вокруг оси О 2, ось вала 3 и центр окружности ступицы 9 совпадают. По внешней окружности ступица 9 имеет равноудаленные между собой места соединения со спицами ступицы 10, обеспечивающие в месте соединения вращательную подвижность в плоскости окружности ступицы 9. Спицы ступицы 10, в количестве равном количеству грузов 4, исполнены таким образом что в сочлененном состоянии с грузами имеют одинаковый вес и обеспечивают движение грузов 4 по заданной траектории близкой к окружности с центром 2. Грузы 4 имеют одинаковый вес (массу) в сочлененном состоянии со спицей ступицы 10, и соединяются таким образом, что ось вращения О 3 груза 4 параллельна осям 1 и 2, одна сторона груза 4 по оси О 3 соединена со спицей колеса 6,другая сторона со спицей ступицы 10 и обеспечивают заданные условия движения. В месте соединения груза 4 со спицей колеса 6 обеспечивается возвратно поступательное движение груза по длине спицы колеса 6 перпендикулярно относительно оси 1 и одновременно груз движется по траектории окружности с изменяющимся радиусом относительно оси 1. В месте соединения груза 4 со спицей ступицы 10 груз движется по траектории близкой к окружности с центром 2. В данном случае на фигуре чертежа 1 изображена ступица 9,спица ступицы 10, груз 4 и вал груза 8 с осью О 3. Вал груза 8 соединен со спицей колеса 6 и спицей ступицы 10 и в месте соединения имеет возможность вращательного движения,перпендикулярен спице колеса 6 и спице ступицы 10 и параллелен валу колеса 2 и валу ступицы 3, но возможны и другие варианты исполнения при условии обеспечения заданных параметров движения. Например при отсутствии в конструкции ступицы, спица одним концом соединяется с валом(с осью О 2) с возможностью обеспечения вращательного движения вокруг оси 2. Во всех местах соединения обеспечивающих вращательное движение могут использоваться подшипники скольжения для уменьшения сопротивления сил трения. Предлагаемый изобретением двигатель работает следующим образом. Силы, действующие в кинематической схеме двигателя, изображены на фиг.2 и 3. Груз 4 массойвоздействует в месте соединения со спицей ступицы 10 с силой тяжести(см. фиг.2), которая расчитывается по формуле 1 где- масса груза- ускорение свободного падения равное 9,8. Силавсегда направлена вниз перпендикулярно горизонтальной поверхности земли. При условии заданного направления вращательного движения по часовой стрелке принимаем, что силав секторе от 90 до 270 градусов по траектории движения близкой к окружности с центром 2 является положительной, способствующей вращению, а в остальном секторе - является отрицательной,противодействующей вращению. Учитывая что спица ступицы 10 обеспечивает движение груза 4 только по траектории близкой к окружности с центром 2 то силав месте соединения спицы ступицы 10 и груза 4 создает силу К (см. фиг.2) действующей по касательной перпендикулярно радиусу этой окружности, которая создает вращательное движение. В горизонтальном положении спицы ступицы 10 значения сили К равны (см. фиг.2). Сила К расчитывается по формуле К 2 где- угол между действующей силойи К. Так как сила К действует по всей оси О 3 груза 4,то в месте соединения (контакта) груза со спицей колеса 6 проекция дествующей силы К создает силу Р (см. фиг.3), которая направлена по касательной линии к окружности с центром оси 1 и перпендикулярна радиусу этой окружности, на которой в данный момент находится груз 4, и создает вращательное движение колеса и вала колеса 2 соответсвенно. В горизонтальном положении спицы колса 6 значение сил К и Р равны (см. фиг.3). Сила Р расчитывается по формуле РК 3 где- угол между действующей силой К и Р. 3 Крутящий момент М (см. фиг.3), который создает сила Р на вале колеса 2, расчитывается по формуле МР 4 где- плечо силы, растояние от центра окружности оси 1 до места воздействия силы Р, в которой на данный момент находится точка контакта груза 4 со спицей колеса 6. Произведем теоретический расчет сил и крутящего момента действующих в предлагаемой изобретением кинематической схеме двигателя. На фигурах чертежей изображен двигатель с использованием грузов 4 в количестве 8 штук,соответсвенно количество спиц колеса 6 и спиц ступицы 10 будет равно по 8 штук. Для расчета принимаем массу одного груза 4, в сочлененном состоянии со спицей ступицы 10, равной 40 килограммам. Расстояние между осями 1 и 2 принимаем 0,4 метра, радиус окружности по которой движется груз с центром 2 - 0,58 метра. Установив положение грузов 4, согласно заданной траектории движения в 8 точках (см. фиг.1,2 и 3) определяем необходимые расстояния и углы воздействия сил. Далее производим расчет числовых значений сил и крутящего момента согласно формулам. При этом необходимо отметить что когда груз 4 находится с правой стороны от вертикальной линии по оси 2, действие силы тяжести груза 4 способствует вращению (со знаком плюс) и при положении спицы ступицы 10 с правой стороны в горизонтальном положении вращательная сила имеет максимальное значение, и наоборот когда груз с левой стороны - действие силы груза является противодействующей вращению (со знаком минус) и при положении спицы ступицы 10 с левой стороны в горизонтальном положении сила противодействующая вращению имеет максимальное значение. При вертикальных положениях спицы ступицы 10 действие вращательной силы груза равно нулю. Данные всех исходных и искомых значений сведены в таблице 1. Далее определяем суммарное значение силы сопротивления качению, которая является еще одной силой противодействующей вращению, она присутсвует в местах соединений, обеспечивающих вращательное движение с использованием подшипников качения. Сила сопротивления качению расчитывается по формуле тт 5 где- нормальная нагрузка в точкае контакта тр - коэффициент трения подшипника качения. Значение нормальной нагрузки в точке контакта ступицы 9 со спицей ступицы 10 принимаем силус положительным знаком, в случае отсутсвия Крутящий момент М воздействующий по окружности О 1, Нм Плечо силы, расстояние от осидо точки контакта груза 4 и спицы колеса 6, м Угол между силами К и Р,Угол между силамии К,Угол положения спицы колеса, где расположен груз,Точка контакта груза 4 и спицы колеса 6 ступицы спица соединяется непосредственно с валом 3 с осью 2. Значение нормальной нагрузки в точке контакта вала груза 8 со спицей колеса 6 равняется силе Р с положительным знаком. Так как в местах соединений, обеспечивающих вращательное движение, будут использоваться подшипники качения радиально-упорного типа с пластичным смазочным материалом, значение коэффициента трения подшипника качения принимаем 0,003. Данные всех исходных и искомых значений сведены в таблице 2. Угол положения спицы колеса, где расположен груз,Коэффициента трения подшипника качения Сила сопротивления качению в месте соединения ступицы 9 со спицей ступицы 10 Мтр, Нм Коэффициента трения подшипника качения Сила сопротивления качению в месте соединения вала груза 8 со спицей колеса 6 Мтр, Нм Точка контакта груза 4 и спицы колеса 6 Определяем значение силы сопротивления качению в месте соединения вала колеса 2 и станины 1. Для расчета значения нормальной нагрузки сммируем общую массу грузов 320 кг. и массу колеса 160 кг (из расчета что для изготовления колеса будут применены легкосплавные материалы) 320160480 кг. Расчет силы тяжести 4809,84704 Н. Расчет значения нормальной нагрузки Мтр 47040,00314,112 Нм. Определяем значение силы сопротивления качению в месте соединения ступицы 9 и вала ступицы 3 (в случае отсутствия ступицы расчет не требуется). Для расчета значения нормальной нагрузки сммируем общую массу грузов 320 кг. и массу ступицы 20 кг (из расчета что для изготовления ступицы будут применены легкосплавные материалы) 32020340 кг. Расчет силы тяжести т 3409,83332 Н. Расчет значения нормальной нагрузки Мтр 33320,0039,996 Нм. Определяем суммарное значение силы сопротивления качению Мтр 9,4084,7714,1129,99638,286 Нм. Определяем крутящий момент вала колеса 2 с учетом сил сопротивления качению 143,3-38,286105,014 Нм. Из расчета видно что суммарное значение крутящего момента, создаваемого действием вращательной силы (в данном случае сила Р) а вращательная сила создается силой тяжести грузов 4, значительно больше суммарного значения крутящего момента,создаваемого силой противодействующей вращению (в том числе силы сопротивления качению),и это создает вращательное движение и соответственно крутящий момент на вале колеса 2. Для более уточненного определения числовых значений произведем аналогичный расчет в положении где спицы смещены на угол 22,5 градусов по часовой стрелке, данные сведены в таблицу 3. Таблица 3 Определяем суммарное значение силы сопротивления качению, данные всех исходных и искомых значений сведены в таблице 4. Значение силы сопротивления качению в местах соединения вала колеса 2 и станины 1, а так же ступицы 9 и вала ступицы 3, 14,112 Нм и 9,996 Нм соответсвенно. Определяем суммарное значение силы сопротивления качению Мтр 9,4086,17814,1129,99639,694 Нм. Определяем крутящий момент вала колеса 2 с учетом сил сопротивления качению 131,9-39,69492,206 Нм. Из вышеизложенного следует, что при горизонтальном положении (0) условно первой спицы 6 колеса крутящий момент вала колеса 2 имеет максимальное значение, а в положении 22,5 минимальное. Далее определяем среднее суммарное значение крутящего момент М из двух положений спиц 6 колеса (105,01492,206) /298,61 Нм. На приведенном в качестве примера теоретическом расчете видно, что при массе одного груза - 40 кг и диаметре колеса около 2 метров,получаем крутящий момент М на вале колеса 98,61 Нм. При увеличении массы грузов и диаметра колеса,крутящий момент М увеличивается соответственно. ФОРМУЛА ИЗОБРЕТЕНИЯ Безтопливный двигатель, содержащий станину,на котором установлены два вала параллельно расположенных друг к другу на определенном расстоянии, на первом из которых жестким зацеплением установлено колесо с внутренним и внешним ободом и спицами, которые одинаковы по форме, равноудалены и имеют одинаковый угол между собой, отличающийся тем, что на спицы колеса воздействуют одним концом валы с закрепленными на них грузами одинаковыми по форме и весу, другая сторона валов с грузами соединена с одинаковыми по форме и весу спицами ступицы, которые соединяются со ступицей (или сразу со вторым валом без ступицы), установленной на втором вале, при этом каждая спица ступицы на втором вале имеет независимую друг от друга подвижность в пределах соседних спиц с двух сторон, таким образом, что обеспечивается траектория движения одних концов валов с грузами,параллельных первому и второму валу, в плоскости внутри окружности вращающегося колеса на разных изменяющихся расстояниях от центра колеса (ось первого вала) совершая возвратно-поступательные движения по спицам колеса, и одновременно другие концы валов с грузами двигаются по траектории близкой к окружности в плоскости, центр которого совпадает с осью второго вала.
МПК / Метки
МПК: F03G 3/00
Метки: двигатель, безтопливный, «зик»
Код ссылки
<a href="https://kz.patents.su/9-31335-beztoplivnyjj-dvigatel-zik.html" rel="bookmark" title="База патентов Казахстана">Безтопливный двигатель «ЗИК»</a>
Двигатель внутреннего сгорания
Номер патента: 8698
Опубликовано: 15.04.2005
Автор: Олифиренко Федор Семенович
МПК: F02B 75/24
Метки: внутреннего, двигатель, сгорания
Формула / Реферат:
Изобретение относится к двигателям внутреннего сгорания и может быть использовано в моторостроении. Механизм преобразования возвратно-поступательного движения во вращательное, используемый в двигателе, может быть использован помимо этого и в других отраслях хозяйства.Техническим результатом изобретения является снижение расхода топлива при сохранении мощности известных ДВС того же объема.Это достигается тем, что в ДВС, включающем корпус, головки...
Спицевое колесо
Номер предварительного патента: 3774
Опубликовано: 16.09.1996
Автор: Овинцев Николай Владимирович
МПК: B60B 1/04
Формула / Реферат:
Изобретение относится к области транспортного машиностроения, а именно к конструкции колес.
Спицевое колесо состоит из обода, спиц и ступицы.
Новым является то, что каждая спица колеса жестко закреплена по касательной от ступицы к ободу, а именно, продольная ось спицы направлена к ступице не по радиусу, а по касательной.
Двигатель ЛАФ-1
Номер предварительного патента: 6099
Опубликовано: 15.04.1998
Авторы: Копяткевич Валерия Александровна, Леонов Александр Федорович, Бутова Елена Николаевна, Копяткевич Илья Игоревич, Таран Максим Владимирович
МПК: F03G 3/00
Формула / Реферат:
Изобретение относится к энергетике, в частности, к гравитационным двигателям, преобразующим энергию силы тяжести в механическую энергию вращения.Техническим результатом от использования изобретения является повышение вращающего момента путем увеличения доли веса груза, создающей вращающий момент на колесе ротора, и уменьшения доли веса груза, создающей тормозящий момент.Этот технический результат достигается тем, что в двигателе для...
Двигатель внутреннего сгорания
Номер предварительного патента: 3688
Опубликовано: 16.09.1996
Автор: Туленов Кали
МПК: F02B 75/32
Метки: двигатель, внутреннего, сгорания
Формула / Реферат:
Изобретение относится к двигателестроению и может быть использовано в качестве силового агрегата на транспортных средствах. Двигатель внутреннего сгорания содержит по меньшей мере один цилиндр и поршень, перемещающийся внутри цилиндра возвратно-поступательно, платформу, которая, совершая круговое движение внутри кольца, преобразует возвратно-поступательное движение поршня во вращательное движение кривошипного вала отбора мощности, жестко...
Колесная пара транспортного средства
Номер патента: 6266
Опубликовано: 15.03.2000
Авторы: Фридберг Аркадий Моисеевич, Винник Леонид Владимирович
МПК: B60B 37/12
Метки: средства, транспортного, колесная, пара
Формула / Реферат:
Изобретение относится к транспортному машиностроению, а более конкретно - к колесным парам транспортных средств.Технический результат - снижение сопротивления движению транспортного средства, упрощение конструкции, повышение надежности работы колесной пары и снижение износа рабочих поверхностей. В колесной паре транспортного средства, содержащей ось 1 и колеса 2, ступицы 3 которых жестко связаны с осью 1, а поверхность 6 катания, по меньшей...
Предыдущий патент: Переменного актива многофазный эжектор для восстановления и подъема добычи в устье скважины
Следующий патент: Способ создания устойчивых к фитофторозу форм картофеля
Случайный патент: Состав для обезвреживания грунта и почвы от токсичных органических веществ