Конвейерные весы
Номер патента: 23590
Опубликовано: 14.06.2013
Авторы: Моисеенко Владимир Юрьевич, Колесников Владимир Александрович, Алимбаев Саид Тулегенович, Намазбаев Тлеухан Серикбаевич, Муравлёв Вячеслав Константинович, Есенбаев Салим Хусайнович, Сагинова Куляш Мусиновна
Формула / Реферат
Изобретение относится к весоизмерительной технике, в частности, к взвешиванию сыпучего материала на ленточных конвейерах.
Задача изобретения - повышение точности и надежности измерения веса сыпучего материала, транспортируемого ленточным конвейером путем разработки конвейерных весов, позволяющих исключить погрешности, возникающие из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика, позволяющих осуществить учет дополнительных погрешностей, появляющихся при передаче нагрузки от конвейерной ленты с сыпучим материалом на датчик веса, обусловленных изменением геометрии измерительной платформы из-за перепада температур в условиях резко континентального климата, а также позволяющих исключить влияние электрических помех на величину интегрального значения веса транспортируемого сыпучего материала на конвейерной лете.
Технический результат достигается тем, что в известных конвейерных весах, содержащих две раздельные шарнирно закрепленные весовые платформы с желобчатыми весовыми роликоопорами, установленные встречно и опирающиеся на датчики веса и преобразователь скорости конвейерной ленты дополнительно введены цифровой термометр, блок аналого-цифрового преобразователя и микропроцессорный блок индикации и управления, при этом выходы первого и второго датчиков веса, выход преобразователя скорости конвейерной ленты и выход цифрового термометра подключены соответственно к первому, второму, третьему и четвертому входам блока аналого-цифрового преобразователя, выход последнего подключен к входу микропроцессорного блока индикации и управления.
Блок аналого-цифрового преобразователя содержит первый и второй аналого-цифровые преобразователи, блок питания, контроллер и порт связи с микропроцессорным блоком индикации и управления, при этом выходы первого и второго датчика веса подключены к первым входам первого и второго аналого-цифрового преобразователя, первый, второй и третий выходы блока питания подключены соответственно ко вторым входам первого и второго аналого-цифрового преобразователя и к первому входу контроллера, выходы первого и второго аналого-цифрового преобразователя подключены соответственно ко второму и третьему входу контроллера, выходы преобразователя конвейерной ленты и цифрового термометра подключены соответственно к четвертому и пятому входам контроллера, выход контроллера подключен к входу порта связи с микропроцессорным блоком индикации и управления.
Микропроцессорный блок индикации и управления содержит клавиатуру, жидкокристаллический дисплей, семисегментный индикатор, порт связи с блоком аналого-цифрового преобразователя, микропроцессор, модуль токового выхода, порт связи с компьютером верхнего уровня и блок питания, при этом выходы клавиатуры, жидкокристаллического дисплея и семисегментного индикатора подключены соответственно к первому, второму и третьему входам микропроцессора, выход блока аналого-цифрового преобразователя подключен к входу порта связи с блоком аналого-цифрового преобразователя, выход которого подключен к четвертому входу микропроцессора, выход которого подключен к входу модуля токового выхода, первый и второй выходы блока питания подключены соответственно к пятому входу микропроцессора и второму входу модуля токового выхода, выход микропроцессора подключен к входу порта связи с компьютером верхнего уровня.
Текст
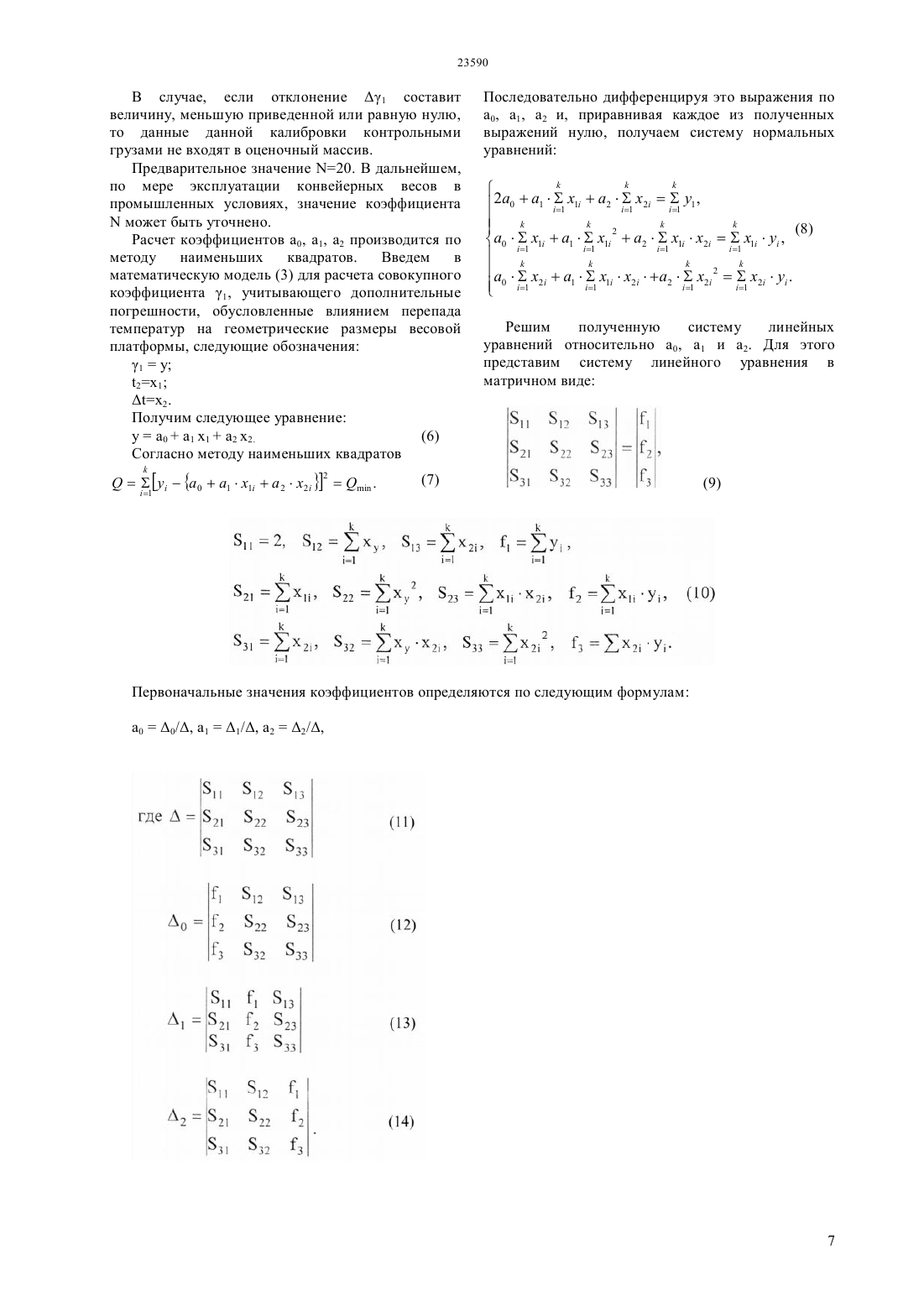
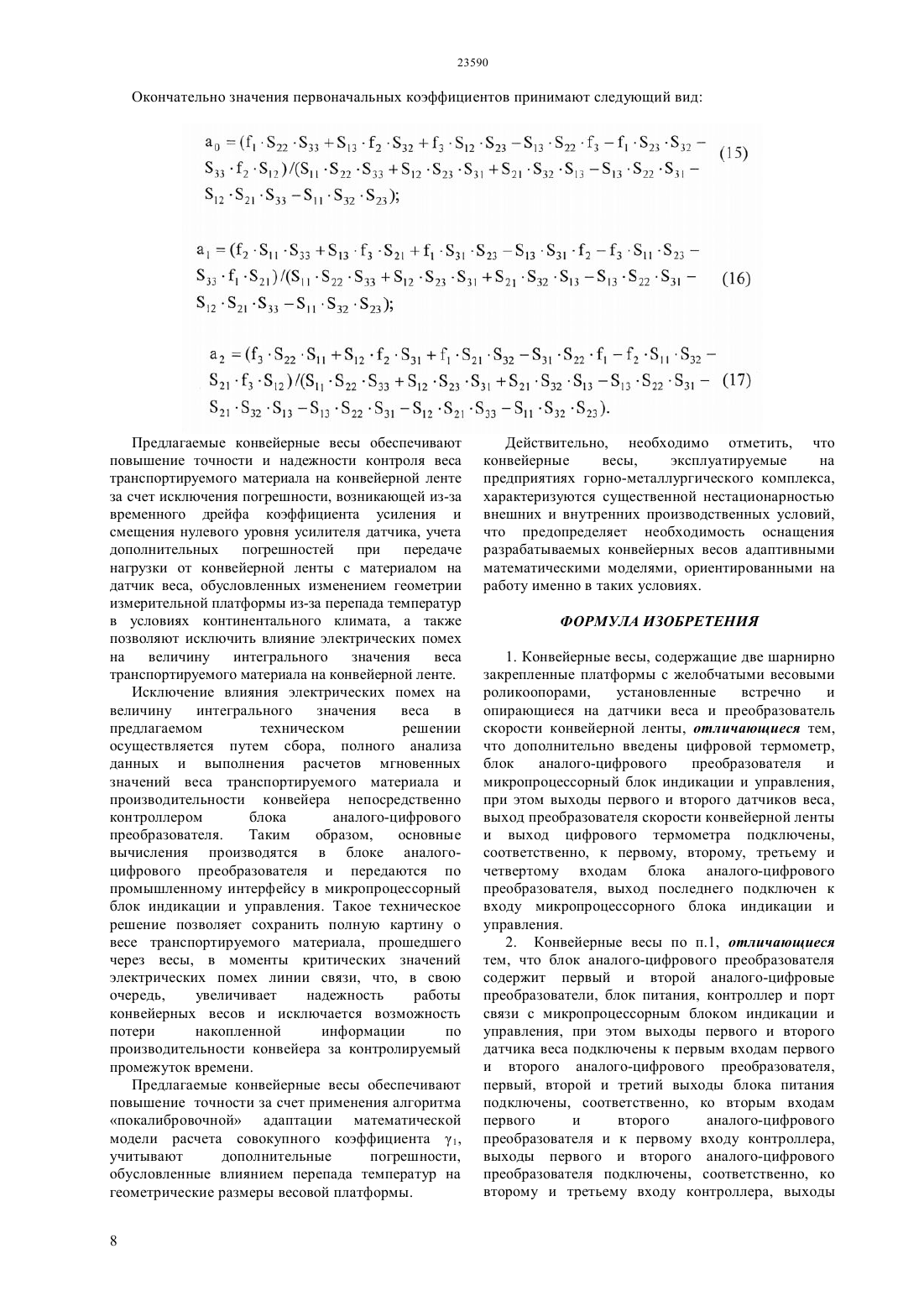
(51) 08 11/16 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ соответственно к первому, второму, третьему и четвертому входам блока аналого-цифрового преобразователя, выход последнего подключен к входу микропроцессорного блока индикации и управления. Блок аналого-цифрового преобразователя содержит первый и второй аналого-цифровые преобразователи, блок питания, контроллер и порт связи с микропроцессорным блоком индикации и управления, при этом выходы первого и второго датчика веса подключены к первым входам первого и второго аналого-цифрового преобразователя,первый, второй и третий выходы блока питания подключены, соответственно, ко вторым входам первого и второго аналого-цифрового преобразователя и к первому входу контроллера,выходы первого и второго аналого-цифрового преобразователя подключены, соответственно, ко второму и третьему входу контроллера, выходы преобразователя конвейерной ленты и цифрового термометра подключены,соответственно,к четвертому и пятому входам контроллера, выход контроллера подключен к входу порта связи с микропроцессорным блоком индикации и управления. Микропроцессорный блок индикации и управления содержит клавиатуру,жидкокристаллический дисплей, семисегментный индикатор, порт связи с блоком аналого-цифрового преобразователя, микропроцессор, модуль токового выхода, порт связи с компьютером верхнего уровня и блок питания, при этом выходы клавиатуры,жидкокристаллического дисплея и семисегментного индикатора подключены,соответственно,к первому,второму и третьему входам микропроцессора, выход блока аналого-цифрового преобразователя подключен к входу порта связи с блоком аналого-цифрового преобразователя, выход которого подключен к четвертому входу микропроцессора, выход которого подключен к входу модуля токового выхода, первый и второй выходы блока питания подключены,соответственно, к пятому входу микропроцессора и второму входу модуля токового выхода, выход микропроцессора подключен к входу порта связи с компьютером верхнего уровня.(72) Намазбаев Тлеухан Серикбаевич Колесников Владимир Александрович Муравлв Вячеслав Константинович Моисеенко Владимир Юрьевич Есенбаев Салим Хусайнович Алимбаев Саид Тулегенович Сагинова Куляш Мусиновна(57) Изобретение относится к весоизмерительной технике, в частности, к взвешиванию сыпучего материала на ленточных конвейерах. Задача изобретения - повышение точности и надежности измерения веса сыпучего материала,транспортируемого ленточным конвейером путем разработки конвейерных весов, позволяющих исключить погрешности, возникающие из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика,позволяющих осуществить учет дополнительных погрешностей,появляющихся при передаче нагрузки от конвейерной ленты с сыпучим материалом на датчик веса, обусловленных изменением геометрии измерительной платформы из-за перепада температур в условиях резко континентального климата, а также позволяющих исключить влияние электрических помех на величину интегрального значения веса транспортируемого сыпучего материала на конвейерной ленте. Технический результат достигается тем, что в известных конвейерных весах, содержащих две раздельные шарнирно закрепленные весовые платформы с желобчатыми весовыми роликоопорами,установленные встречно и опирающиеся на датчики веса и преобразователь скорости конвейерной ленты дополнительно введены цифровой термометр, блок аналогоцифрового преобразователя и микропроцессорный блок индикации и управления, при этом выходы первого и второго датчиков веса, выход преобразователя скорости конвейерной ленты и выход цифрового термометра подключены Изобретение относится к весоизмерительной технике, в частности, к взвешиванию материала на ленточных конвейерах. Известны конвейерные весы (Предварительный патент РК 7234, кл. 01 11/-2, 1999 г., бюл. 2),содержащие две шарнирно закрепленные,механически не связанные весовые платформы с желобчатыми роликоопорами,установленные встречно и опирающиеся на датчики веса,эталонный груз и механизм его перемещения, а также контрольные грузы для градуировки и поверки весов, при этом выходы первого и второго датчиков веса подключены, соответственно, через усилитель, аналого-частотный преобразователь к первому и второму входу сумматора,осуществляющего усреднение сигнала обоих каналов и интегрирование их во времени. Конвейерные весы работают следующим образом. Конвейерные весы монтируются на раме конвейера вместо двух штатных роликоопор и устанавливаются на встречных платформах в качестве весовых опор. Измерительной схемой реализуется двухканальный принцип измерения,обеспечивающий инвариантность конвейерных весов к действию возмущений - ряда механических факторов(сопротивление движению ленты,асимметрия ее деформации на наклонных конвейерах и др.). Датчики веса питаются напряжением,пропорциональным скорости конвейера, снимаемым с тахогенераторного датчика скорости. Выходные напряжения датчиков веса,пропорциональные текущей производительности,поступают на отдельные усилители и затем - на аналого-частотные преобразователи. Частотные сигналы, пропорциональные производительности,поступают на общий сумматор, осуществляющий усреднение сигналов обоих каналов и интегрирование их во времени. Недостатком данного технического решения являются низкая точность измерения веса материала,транспортируемого конвейером,обусловленная погрешностями, возникающими изза временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя сигнала датчика веса. Кроме того, при использовании известного устройства колебания температуры окружающей среды приводят к изменению геометрических размеров весовых платформ за счет линейного расширения или уменьшения металлических конструкций из-за перепада температур в условиях континентального климата. Из-за изменения геометрии измерительных платформ возникают дополнительные погрешности при передаче нагрузки - от конвейерной ленты с материалом на датчик веса. Другим недостатком известного технического решения является существенное влияние электрических помех на величину аналогового сигнала, поступающего на входной усилитель от датчика веса, т.к. датчик веса находится на 2 значительном расстоянии от электронного блока измерительной схемы конвейерных весов, что, в свою очередь, также приводит к снижению точности измерения веса транспортируемого материала на конвейерах. Наиболее близкими по технической сущности являются конвейерные весы (Патент РК 12248, кл. 01 11/2, 2002 г., бюл. 11), содержащие две шарнирно закрепленные платформы с желобчатыми роликоопорами,установленные встречно и опирающиеся на датчики веса, эталонный груз и механизм его перемещения,платформы расположены по разные стороны одной стационарной роликоопоры, наружное плечо каждой платформы снабжено двумя контргрузами и опирается на датчик веса, внутреннее плечо каждой платформы снабжено призмой для подвески контрольных грузов, причем датчик веса и призма расположены на одной продольной стороне платформы, при этом датчики веса и призмы разных платформ расположены по разные стороны конвейера, и преобразователь скорости конвейерной ленты, выходы первого и второго датчика веса соединены, соответственно, с первыми входами первого и второго блока усиления и интегрирования, выход преобразователя скорости конвейерной ленты соединен со вторыми входами первого и второго блока усиления и интегрирования, выходы первого и второго блока усиления и интегрирования соединены с первым и вторым входами сумматора. Конвейерные весы работают следующим образом. При включении конвейерного транспортера нагрузка ленты передается на датчики веса,установленные в платформе с желобчатыми роликоопорами. При этом информативный сигнал,соответствующий полезной измеряемой нагрузке ,поступает на них синфазно, а неинформативный сигнал,соответствующий возмущениям,благодаря встречному расположению платформ поступает дифференциально. Суммирование сумматором выходных данных датчиков веса после перемножения на сигнал от преобразователя скорости, усиления и интегрирования сумматоров отдельных каналов обеспечивает компенсацию неинформативных сигналов - возмущений ,влияющих на точность, и интегрирование во времени только измеряемой производительности. К недостаткам известного технического решения следует отнести низкую точность измерения из-за влияния колебаний температуры окружающей среды на выходной сигнал датчика веса в течение смены суток при одной и той же величине транспортируемого материала конвейером,обусловленную изменением геометрических размеров весовых платформ за счет линейного расширения или уменьшения металлических конструкций из-за перепада температур в условиях континентального климата. Кроме того,номинальная статическая характеристика датчика веса определяется при температуре, отличающейся от температуры окружающей среды при эксплуатации конвейерных весов, что, в свою очередь, также приводит к снижению точности измерения веса материала,транспортируемого конвейерами. Другим недостатком известного технического решения является существенное влияние электрических помех на величину аналогового сигнала, поступающего на входной усилитель от датчика веса, т.к. датчик веса находится на значительном расстоянии от электронного блока измерительной схемы конвейерных весов, что, в свою очередь, также приводит к снижению точности измерения веса материала, транспортируемого конвейерами. Следующим недостатком известного технического решения является низкая точность измерения веса материала, транспортируемого конвейером,обусловленная погрешностями,возникающими из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя выходного сигнала датчика веса. Таким образом,недостатком известного технического решения являются низкие точность и надежность измерения веса материала,транспортируемого ленточным конвейером,обусловленные влиянием временного дрейфа коэффициента усиления и смещения нулевого уровня входного усилителя,существенным влиянием электрических помех на величину аналогового сигнала, поступающего на входной усилитель,возникновением дополнительных погрешностей при передаче нагрузки от конвейерной ленты с материалом на датчик веса изза изменения геометрии измерительной платформы за счет перепада температур окружающей среды при эксплуатации конвейерных весов на открытых площадках горно-обогатительных комбинатов, а также из-за наличия электрических помех,влияющих на интегральное значение веса. В основу изобретения поставлена задача разработать конвейерные весы,полностью исключающие погрешности, возникающие из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика,позволяющие учитывать дополнительные погрешности при передаче нагрузки от конвейерной ленты с материалом на датчик веса, обусловленные изменением геометрии измерительной платформы из-за перепада температур в условиях континентального климата, а также позволяющие исключить влияние электрических помех на величину аналогового сигнала, поступающего на блок аналого-цифрового преобразователя, а также интегрального значения веса транспортируемого материала на конвейерной ленте. Технический результат,достигаемый изобретением, - значительное повышение точности и надежности измерения веса материала,транспортируемого ленточным конвейером, с полным исключением погрешностей, возникающих из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика веса,разработка алгоритма, позволяющего учитывать дополнительные погрешности при передаче нагрузки от конвейерной ленты с материалом на датчик веса на основе контроля температуры окружающей среды, где находится весовая измерительная платформа, а также создание блока аналого-цифрового преобразователя и специализированного микропроцессорного блока,позволяющих исключить влияние электрических помех на величину аналогового сигнала, на значение датчика веса и интегрального значения веса транспортируемого материала на конвейерной ленте, и способного обеспечить надежную и стабильную работу конвейерных весов в тяжелых промышленных и климатических условиях. Поставленная задача решается тем, что в известных конвейерных весах, содержащих две раздельные шарнирно закрепленные весовые платформы с желобчатыми весовыми роликоопорами,установленные встречно и опирающиеся на датчики веса, и преобразователь скорости конвейерной ленты, дополнительно введены цифровой термометр, блок аналогоцифрового преобразователя и микропроцессорный блок индикации и управления, при этом выходы первого и второго датчиков веса, выход преобразователя скорости конвейерной ленты и выход цифрового термометра подключены соответственно, к первому, второму, третьему и четвертому входам блока аналого-цифрового преобразователя, выход последнего подключен к входу микропроцессорного блока индикации и управления. Блок аналого-цифрового преобразователя содержит первый и второй аналого-цифровые преобразователи, блок питания, контроллер и порт связи с микропроцессорным блоком индикации и управления, при этом выходы первого и второго датчиков веса подключены к первым входам первого и второго аналого-цифрового преобразователя, первый, второй и третий выходы блока питания подключены, соответственно, ко вторым входам первого и второго аналогоцифрового преобразователя и к первому входу контроллера, выходы первого и второго аналогоцифрового преобразователя подключены,соответственно, ко второму и третьему входу контроллера, выходы преобразователя конвейерной ленты и цифрового термометра подключены,соответственно, к четвертому и пятому входам контроллера, выход контроллера подключен к входу порта связи с микропроцессорным блоком индикации и управления. Микропроцессорный блок индикации и управления содержит клавиатуру,жидкокристаллический дисплей, семисегментный индикатор, порт связи с блоком аналого-цифрового преобразователя, микропроцессор, модуль токового выхода, порт связи с компьютером верхнего уровня и блок питания, при этом выходы клавиатуры,жидкокристаллического дисплея и семисегментного индикатора подключены,соответственно,к первому,второму и третьему входам микропроцессора, выход блока аналого-цифрового 3 преобразователя подключен к входу порта связи с блоком аналого-цифрового преобразователя, выход которого подключен к четвертому входу микропроцессора, выход которого подключен к входу модуля токового выхода, первый и второй выходы блока питания подключены,соответственно, к пятому входу микропроцессора и второму входу модуля токового выхода, выход микропроцессора подключен к входу порта связи с компьютером верхнего уровня. На фиг.1 изображена схема конвейерных весов на наклонном конвейере, на фиг.2 - вид А на фиг.1. Конвейерные весы содержат две встречные (по расположению весовых роликов относительно шарниров) весовые двуплечие платформы нижнюю 1 и верхнюю 2, подвешенные к шарнирным опорам 3 и 4. Наружное плечо каждой весовой платформы снабжено двумя контргрузами 5 и 6, выполненными с возможностью перемещения вдоль плеча, и концом опирается на датчики веса 7 и 8. Внутренние плечи весовых платформ снабжены весовыми роликоопорами 9 и 10, по которым перемещается конвейерная лента 11, и призмами 12 и 13 - для поочередной подвески контрольных грузов 14 при градуировке и поверке весов. Датчики веса 7 и 8 и призмы 12 и 13 при встречном монтаже весовых платформ расположены по разные стороны конвейера. Для исключения взаимного влияния при поочередной догрузке весовых платформ контрольными грузами весовые платформы расположены по разные стороны стационарной роликоопоры 15. Конвейерные весы монтируются на раме конвейера вместо двух штатных роликоопор,которые устанавливаются на встречных платформах в качестве весовых опор 9 и 10. В весах реализуется двухканальный принцип измерения, обеспечивающий инвариантность к действию возмущений - ряду механических факторов(сопротивления движению ленты,асимметрии ее деформации на наклонных конвейерах, динамических нагрузках и др.). Транспортировка материала 16 осуществляется на конвейерной ленте 11. При работе конвейерных весов нагрузка лентыпередается на датчики веса 7, 8. При этом информативный сигнал, соответствующий полезной измеряемой нагрузке , поступает на них синфазно,а неинформативный сигнал,соответствующий возмущениям , благодаря встречному расположению весовых платформ поступает дифференциально на блок 23 аналогоцифрового преобразователя. Одновременно на контроллер 27 блока 23 аналого-цифрового преобразователя поступает выходной сигнал преобразователя скорости конвейерной ленты 21. Процедура градуировки и поверки конвейерных весов осуществляется следующим образом. При поднятой конвейерной ленте 11 передача единицы массы конвейерной ленты и материала 16 на опоры имитируется эталонным грузом балкой 17 массой 4 Б 2,(1) где- линейная плотность материала, кг/м- длина пролета конвейерной ленты(расстояние между опорами), м. Лебедкой 18 балка опускается на средние ролики по осевой линии конвейера и последовательно фиксируется в четырех положениях загружены первый стационарный ролик 19 и первая весовая роликоопора 9, первая весовая роликоопора 9 и стационарная роликоопрора 15 первой (нижней) весовой платформы стационарный ролик 15 и вторая весовая роликоопора 10, вторая весовая роликоопора 10 и второй стационарный ролик 20 второй (верхней) весовой платформы. В каждом из четырех положений балки снимают показания датчиков веса соответствующих платформ. Эффективное значение реакции каждой платформы определяют как среднее двух показаний при нагружении балкой ее весового ролика со смежными стационарными роликами. Получают средние показания Мн - для нижней и Мв - для верхней весовой платформы. Далее определяется коэффициент пропорциональности , и измеряемая производительность конвейера после калибровки контрольными грузами будет определяться по формуле,(2) где- измеряемая производительность конвейера, кг- выходной сигнал датчика веса, мВ- выходной сигнал преобразователя скорости конвейерной ленты, м/сек- коэффициент пропорциональности. Преобразователь скорости конвейерной ленты 21 может быть представлен, например, в виде отдельного изготовленного изделия с датчиком преобразования перемещения в электрический сигнал, действие которого основано на эффекте Холла. Датчик температуры 22 весовой платформы может быть представлен, например, в виде цифрового термометра с программируемым разрешением, работающего по протоколу 1 фирмы- 1820. На показания датчика не влияет его местоположение,таким образом, он может располагаться на любой весовой платформе. Блок 23 аналого-цифрового преобразователя состоит из первого и второго аналого-цифровых преобразователей 24, 25, блока питания 26,контроллера 27 и порта 28 связи с микропроцессорным блоком индикации и управления. Первый и второй аналого-цифровые преобразователи 24 и 25 могут быть представлены,например, в виде модуля, выполненного на основе прецизионных 24-битных специализированных аналого-цифровых преобразователей фирмы- 7714. В микросхеме предусмотрены и используются автоматические калибровки нуля и полной шкалы, что позволяет полностью исключить влияние временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика веса, что, в свою очередь, позволяет в значительной степени стабилизировать показания, полученные от датчиков, а, значит, и повысить точность показаний весов. Блок питания 26 может быть представлен,например, в виде отдельно изготовленной платы с расположенными на ней преобразователями и фильтрами напряжений. Контроллер 27 может быть представлен,например, в виде высокопроизводительного,маломощного 8-разрядного -микроконтроллера с развитой -архитектурой, энергонезависимой памятью программ и данных,КМОП микроконтроллера - 64. За счет выполнения большинства инструкций за один машинный цикл контроллера достигается производительность 1 млн. операций в секунду, что позволяет оптимизировать соотношение энергопотребления и быстродействия. Для исключения влияния электрических помех на аналоговый сигнал, поступающий от датчиков веса на аналого-цифровой преобразователь, а также для удобства монтажа, модули аналого-цифрового преобразователя, датчик температуры весовой платформы и контроллер выполнены в виде отдельно изготовленного устройства - черного ящика - блока аналого-цифрового преобразователя который при монтаже весов располагается вблизи установки весовых платформ весов. Порт 28 связи с микропроцессорным блоком индикации и управления может быть представлен,например, в виде модуля, расположенного на основной плате блока АЦП и построенного на основе токовой петли или промышленного интерфейса -485, позволяющего осуществлять связь на расстоянии до 1200 м. Микропроцессорный блок 29 индикации и управления состоит из клавиатуры 30,жидкокристаллического дисплея 31,семисегментного индикатора 32, порта 33 связи с блоком 23 аналого-цифрового преобразователя,микропроцессора 34, модуля токового выхода 35,порта 36 связи с компьютером верхнего уровня и блока питания 37. Клавиатура 30 может быть представлена,например, в виде промышленной клавиатуры 44,обеспечивающей стабильный съем команд в тяжелых промышленных условиях. Жидкокристаллический дисплей 31 может быть представлен, например, в виде промышленного дисплея с технологиейсо схемой драйвера и генератором кодасо светодиодной подсветкой фирмы. Семисегментный индикатор 32 может быть представлен,например,в виде отдельно изготовленной и обособленно устанавливаемой в корпусе микропроцессорного блока индикации и управления платы с отдельным контроллером,выполняющим функции знакогенератора,и установленными семисегментными модулями,например, фирмы 05-12. Порт 33 связи с блоком аналого-цифрового преобразователя может быть представлен,например, в виде модуля, расположенного на плате центрального процессора микропроцессорного блока индикации и управления, выполненного на основе токовой петли или промышленного интерфейса -485. Микропроцессор 34 может быть представлен,например, в виде высокопроизводительного,маломощного 8-разрядного -микроконтроллера с развитой -архитектурой, энергонезависимой памятью программ и данных,КМОП микроконтроллера 128. Модуль токового выхода 35 может быть представлен,например,в виде модуля,расположенного на плате центрального процессора микропроцессорного блока индикации и управления, и выполненного на основе микросхема-420. Порт 36 связи с компьютером верхнего уровня может быть представлен, например, в виде модуля,расположенного на плате центрального процессора микропроцессорного блока индикации и управления, и выполненного на основе микросхем 202 или 485, и обеспечивает надежную связь микропроцессорного блока индикации и управления электронно-вычислительной машины верхнего информационного уровня в тяжелых промышленных условиях. Блок питания 37 может быть представлен,например, в виде отдельно изготовленной и обособленно устанавливаемой платы с трансформатором, фильтрами и преобразователями напряжений, обеспечивающей стабильную работу микропроцессорного блока индикации и управления и блока аналого-цифрового преобразователя. Клавиатура и жидкокристаллический индикатор используются для настройки весов путем перемещения по развитой структуре меню и ввода специальных настроечных параметров, вместе с этим с помощью клавиатуры и жидкокристаллического дисплея обслуживающему персоналу предоставляется возможность совершать действия, необходимые для поддержания весов в полностью работоспособном состоянии, а именно проведение тарирования (определения веса пустой ленты),проведение поверки с помощью специальных грузов и с помощью взвешенного материала, постоянный мониторинг сигналов датчиков веса,скорости и температуры. Семисегментный индикатор используется для отображения интегрированной массы, прошедшей через весовые платформы, либо для отображения мгновенной производительности конвейера, на котором установлены весы. Порты связи используются для связи микропроцессорного блока индикации и управления с блоком аналогоцифрового преобразователя и электронновычислительной машиной верхнего информационного уровня. Модуль токового выхода выдает токовый сигнал пропорциональный мгновенной производительности конвейера, что дает возможность использовать весы не только как прибор технического и коммерческого учета, но и как задающий элемент автоматизированной системы управления технологической цепочкой или линией с 5 обратной связью, а использование показаний весов в косвенных расчетах дает возможность использовать весы в технологической контрольной цепи крупных промышленных предприятий. Конструктивно микропроцессорный блок 29 индикации и управления может быть представлен,например, в виде отдельно изготовленного устройства, расположенного в металлическом ящике в пылевлагозащищенном исполнении, основой которого является плата центрального процессора с расположенными на ней разъемами для клавиатуры,жидкокристаллического дисплея, семисегментного индикатора и подключения блока питания, а также с расположенными на ней модулями портов, токового выхода и микроконтроллера. Определение совокупного коэффициента,учитывающего дополнительные погрешности с помощью заявляемого устройства, основано на следующих теоретических предпосылках. Путем обработки экспериментальных данных статистическими методами для учета влияния температуры окружающей среды и перепада температуры на геометрию весовых платформ получено следующее корреляционное уравнение для определения совокупного коэффициента,позволяющего учитывать дополнительные погрешности 1 а 0 а 1 1 2 ,(3) где 1 - совокупный коэффициент, учитывающий дополнительные погрешности обусловленные влиянием перепада температур на геометрические размеры весовой платформы а 0, а 1, а 2 - эмпирические коэффициенты 1 - измеряемая температура окружающей среды на весовой платформе, С величина перепада температуры окружающей среды, определяемая через каждые 60 мин работы конвейерных весов, С. Далее осуществляется корректировка величины выходного сигнала датчика веса(4) где 1 - измеряемая величина сигнала от датчика веса, мВ- скорректированная величина датчика веса с учетом дополнительных погрешностей,возникающих из-за влияния перепада температур на геометрические размеры первой весовой платформы, мВ. Далее измеряемая производительность конвейера определяется по следующей зависимости- скорость конвейерной ленты, м/сек- коэффициент пропорциональности. При калибровке конвейерных весов контрольными грузами, зная величину контрольного груза, значения выходного сигнала датчика веса,величину измеряемой температуры окружающей среды, а также величину перепада температуры 6 окружающей среды за последние 60 мин,определяется фактическое значение совокупного коэффициента 1. Далее определяется величина эмпирических коэффициентов а 0, а 1, а 2 методом многофакторного корреляционного анализа на основе данных,полученных при калибровке конвейерных весов контрольными грузами. На основе проведенных экспериментальных исследований конвейерных весов, эксплуатируемых на предприятиях горно-металлургического комплекса с использованием различных алгоритмов адаптации математической модели расчета совокупного коэффициента 1, учитывающего дополнительные погрешности,обусловленные влиянием перепада температур на геометрические размеры весовой платформы, разработан метод покалибровочной адаптации коэффициентов а 0, а 1 и а 2 из уравнения (3) по методу наименьших квадратов. Покалибровочная адаптация предусматривает перерасчет указанных коэффициентов от калибровки к калибровке по ходу эксплуатации конвейерных весов. В течение первыхкалибровок контрольными грузами по ходу эксплуатации конвейерных весов в математической модели для расчета совокупного коэффициента 1, учитывающего дополнительные погрешности, обусловленные влиянием перепада температур на геометрические размеры весовой платформы, используются постоянные значения коэффициентов а 0, а 1, а 2, определяемые при отладке алгоритмического обеспечения конвейерных весов в промышленных условиях. Начиная с ( 1) калибровки контрольными грузами, коэффициенты а 0, 1 и а 2 пересчитываются по данным фактического значения совокупного коэффициента 1, учитывающего дополнительные погрешности, обусловленные влиянием перепада температур на геометрические размеры весовой платформы, а также фактических значений измеряемой температуры 1 окружающей среды на весовой платформе и величиныперепада температуры окружающей среды, определяемой через каждые 60 мин работы конвейерных весов при проведении первыхкалибровок контрольными грузами конвейерных весов. В дальнейшем коэффициенты пересчитываются при каждой калибровке контрольными грузами конвейерных весов в случае, если отклонение рассчитанного значения совокупного коэффициента 1, учитывающего дополнительные погрешности,обусловленные влиянием перепада температур на геометрические размеры весовой платформы, от фактического будет больше или равно 10,03. 11 -1 ф , где 1 - отклонение расчетного значения 1 от фактического В случае, если отклонение 1 составит величину, меньшую приведенной или равную нулю,то данные данной калибровки контрольными грузами не входят в оценочный массив. Предварительное значение 20. В дальнейшем,по мере эксплуатации конвейерных весов в промышленных условиях, значение коэффициентаможет быть уточнено. Расчет коэффициентов а 0, а 1, а 2 производится по методу наименьших квадратов. Введем в математическую модель (3) для расчета совокупного коэффициента 1, учитывающего дополнительные погрешности, обусловленные влиянием перепада температур на геометрические размеры весовой платформы, следующие обозначения 1 у 21 2. Получим следующее уравнение уа 0 а 1 х 1 а 2 х 2.(6) Согласно методу наименьших квадратов Последовательно дифференцируя это выражения по а 0, а 1, а 2 и, приравнивая каждое из полученных выражений нулю, получаем систему нормальных уравнений Решим полученную систему линейных уравнений относительно а 0, а 1 и а 2. Для этого представим систему линейного уравнения в матричном виде Первоначальные значения коэффициентов определяются по следующим формулам а 00/, а 11/, а 22/, 7 Окончательно значения первоначальных коэффициентов принимают следующий вид Предлагаемые конвейерные весы обеспечивают повышение точности и надежности контроля веса транспортируемого материала на конвейерной ленте за счет исключения погрешности, возникающей из-за временного дрейфа коэффициента усиления и смещения нулевого уровня усилителя датчика, учета дополнительных погрешностей при передаче нагрузки от конвейерной ленты с материалом на датчик веса, обусловленных изменением геометрии измерительной платформы из-за перепада температур в условиях континентального климата, а также позволяют исключить влияние электрических помех на величину интегрального значения веса транспортируемого материала на конвейерной ленте. Исключение влияния электрических помех на величину интегрального значения веса в предлагаемом техническом решении осуществляется путем сбора, полного анализа данных и выполнения расчетов мгновенных значений веса транспортируемого материала и производительности конвейера непосредственно контроллером блока аналого-цифрового преобразователя. Таким образом,основные вычисления производятся в блоке аналогоцифрового преобразователя и передаются по промышленному интерфейсу в микропроцессорный блок индикации и управления. Такое техническое решение позволяет сохранить полную картину о весе транспортируемого материала, прошедшего через весы, в моменты критических значений электрических помех линии связи, что, в свою очередь,увеличивает надежность работы конвейерных весов и исключается возможность потери накопленной информации по производительности конвейера за контролируемый промежуток времени. Предлагаемые конвейерные весы обеспечивают повышение точности за счет применения алгоритма покалибровочной адаптации математической модели расчета совокупного коэффициента 1,учитывают дополнительные погрешности,обусловленные влиянием перепада температур на геометрические размеры весовой платформы. 8 Действительно, необходимо отметить, что конвейерные весы,эксплуатируемые на предприятиях горно-металлургического комплекса,характеризуются существенной нестационарностью внешних и внутренних производственных условий,что предопределяет необходимость оснащения разрабатываемых конвейерных весов адаптивными математическими моделями, ориентированными на работу именно в таких условиях. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Конвейерные весы, содержащие две шарнирно закрепленные платформы с желобчатыми весовыми роликоопорами,установленные встречно и опирающиеся на датчики веса и преобразователь скорости конвейерной ленты, отличающиеся тем,что дополнительно введены цифровой термометр,блок аналого-цифрового преобразователя и микропроцессорный блок индикации и управления,при этом выходы первого и второго датчиков веса,выход преобразователя скорости конвейерной ленты и выход цифрового термометра подключены,соответственно, к первому, второму, третьему и четвертому входам блока аналого-цифрового преобразователя, выход последнего подключен к входу микропроцессорного блока индикации и управления. 2. Конвейерные весы по п.1, отличающиеся тем, что блок аналого-цифрового преобразователя содержит первый и второй аналого-цифровые преобразователи, блок питания, контроллер и порт связи с микропроцессорным блоком индикации и управления, при этом выходы первого и второго датчика веса подключены к первым входам первого и второго аналого-цифрового преобразователя,первый, второй и третий выходы блока питания подключены, соответственно, ко вторым входам первого и второго аналого-цифрового преобразователя и к первому входу контроллера,выходы первого и второго аналого-цифрового преобразователя подключены, соответственно, ко второму и третьему входу контроллера, выходы преобразователя конвейерной ленты и цифрового термометра подключены,соответственно,к четвертому и пятому входам контроллера, выход контроллера подключен к входу порта связи с микропроцессорным блоком индикации и управления. 3. Конвейерные весы по п.1, отличающиеся тем,что микропроцессорный блок индикации и управления содержит клавиатуру,жидкокристаллический дисплей, семисегментный индикатор, порт связи с блоком аналого-цифрового преобразователя, микропроцессор, модуль токового выхода, порт связи с компьютером верхнего уровня и блок питания, при этом выходы клавиатуры, жидкокристаллического дисплея и семисегментного индикатора подключены,соответственно,к первому,второму и третьему входам микропроцессора, выход блока аналого-цифрового преобразователя подключен к входу порта связи с блоком аналого-цифрового преобразователя, выход которого подключен к четвертому входу микропроцессора, выход которого подключен к входу модуля токового выхода, первый и второй выходы блока питания подключены,соответственно, к пятому входу микропроцессора и второму входу модуля токового выхода, выход микропроцессора подключен к входу порта связи с компьютером верхнего уровня.
МПК / Метки
МПК: G08G 11/16
Метки: конвейерные, весы
Код ссылки
<a href="https://kz.patents.su/9-23590-konvejjernye-vesy.html" rel="bookmark" title="База патентов Казахстана">Конвейерные весы</a>
Конвейерные весы
Номер предварительного патента: 7234
Опубликовано: 15.02.1999
Автор: Галин Игорь Александрович
МПК: G01G 11/02
Метки: конвейерные, весы
Формула / Реферат:
Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания сыпучего материала на ленточных конвейерах.Техническим результатом изобретения является повышение точности конвейерных весов.Это достигается тем, что в конвейерных весах, содержащих две шарнирно закрепленные платформы с желобчатыми весовыми роликоопорами, установленные встречно и опирающиеся на датчики веса, эталонный груз и механизм его перемещения,...
Конвейерные весы
Номер патента: 12248
Опубликовано: 15.08.2008
Авторы: Син Владимир Моисеевич, Галин Игорь Александрович, Донис Владимир Константинович, Бочаров Александр Валентинович
МПК: G01G 11/02
Метки: конвейерные, весы
Формула / Реферат:
Изобретение относится к весоизмерительной технике, в частности, к взвешиванию сыпучего материала на ленточных конвейерах.Техническим результатом изобретения является повышение точности и упрощение градуировки и поверки конвейерных весов. Это достигается применением двух шарнирно закрепленных встречных двуплечих платформ с весовыми роликоопорами, расположенных по разные стороны одной стационарной роликоопоры, каждая из которых снабжена...
Конвейерные весы
Номер предварительного патента: 14575
Опубликовано: 15.07.2004
Авторы: Клуниченко Анатолий Иванович, Рахимова Райфа Гибадулловна, Лигай Валерий Давыдович, Филатов Виктор Владимирович, Намазбаев Тлеухан Серикбаевич, Нахай Ирина Ивановна
МПК: G01G 11/16
Метки: весы, конвейерные
Формула / Реферат:
Изобретение относится к весоизмерительнойтехнике, в частности к устройствам для взвешивания и дозирования сыпучих материлов в дозаторах иленточных конвейерах.Задача изобретения - создание упрощеннойконструкции конвейерных весов с высокой надежностью и стабильной работой при больших динамических нагрузках и расширение области применения.Конвейерные весы содержат ролик измерительный, установленный на раме конвейера, датчики силы и скорости...
Аппарат для виброакустической резонансной терапии
Номер предварительного патента: 17507
Опубликовано: 14.07.2006
Авторы: Пархоменко Александр Иванович, Васильченко Антон Александрович, Сергиенко Анатолий Викторович
МПК: A61H 23/00, A61N 2/00, A61N 7/00...
Метки: терапии, виброакустической, аппарат, резонансной
Формула / Реферат:
Изобретение относится к медицинской технике, в частности, к вибромассажным устройствам, и может быть применено в медицинских учреждениях и домашних условиях для профилактики и лечения различных заболеваний.Технический результат - расширение арсенала средств аналогичного назначения, повышение надежности устройства, повышение эффективности воздействия и расширение функциональных возможностей - достигается тем, что аппарат для виброакустической...
Устройство для моделирования нейрона
Номер предварительного патента: 12260
Опубликовано: 15.11.2002
Авторы: Ивель Виктор Петрович, Серебриников Вадим Анатольевич
МПК: G06G 7/60
Метки: нейрона, устройство, моделирования
Формула / Реферат:
Изобретение относится к области бионики и нейрокомпьютерных информационных технологий и может быть использовано в качестве элемента нейронных сетей для моделирования процессов, в устройствах распознавания образов и в системах нейросетевого управления.Устройство для моделирования нейрона содержит вход, управляющий изменением порога, вход, управляющий изменением независимой переменной, вход, управляющий изменением веса выходной величины,...
Предыдущий патент: Способ пайки “СКГМ-87″
Следующий патент: Вольтамперометрический способ определения урана (VI) в растворах
Случайный патент: Способ дегидрирования алкироматических углеводородов