Универсальное грузозахватное устройство для круглых и плоских тел
Номер инновационного патента: 26774
Опубликовано: 15.04.2013
Авторы: Калмуханбетов Болатжан Естаевич, Нуртазина Баян Хаджи-Мукановна, Абдусалямов Нурлан Нурбекович, Туякова Арайлым Сабыровна, Егенбердиева Айгерим Салкынбековна, Гаипов Бахытжан
Формула / Реферат
Универсальное грузозахватное устройство для круглых и плоских тел
Изобретение относится к подъемно-транспортному машиностроению и
может быть использовано, для обслуживания металлорежущего, кузнечнопрессового, складского оборудований и выполнения различных
технологических операции, в том числе строительных, сборочных и загрузочно-разгрузочных операции.
Обеспечение повышения производительности за счет
многофункциональности и улучшение эксплуатационных характеристик, осуществляется, за счет того, что дополнительно в захватном устройстве для удобства захвата груза введены выдвижные захватные устройства на траверсе и башмаки захватных устройств удлиняются с помощью гидроцилиндров и могут поворачиваться вокруг собственной оси на 180° с помощью гидроцилиндра установленного внутри выдвижной траверсы.
Предлагаемое захватное устройство позволяет работать с грузами различной формы и за счет этого повышает производительность всего погрузочного устройства.
Текст
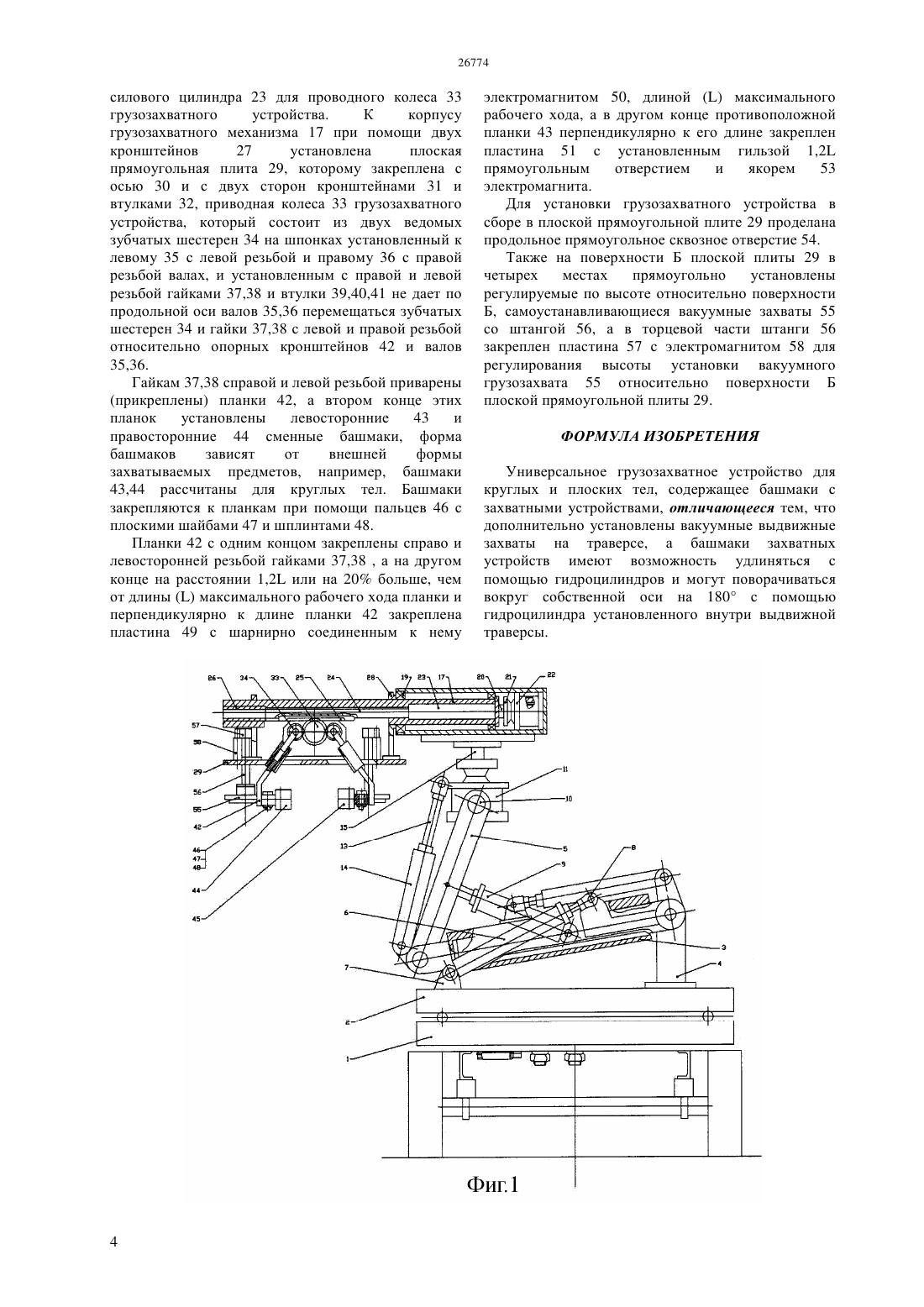
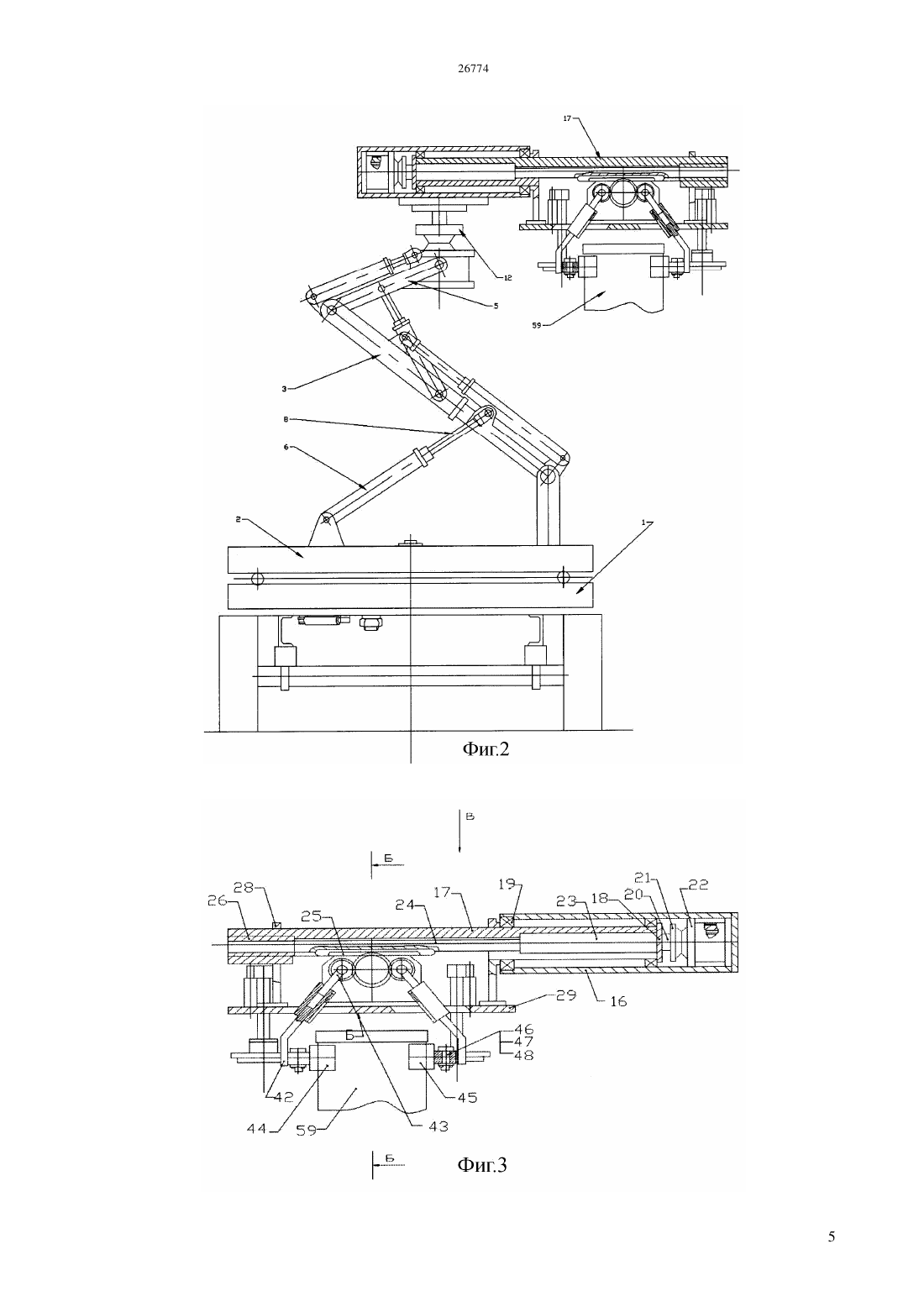
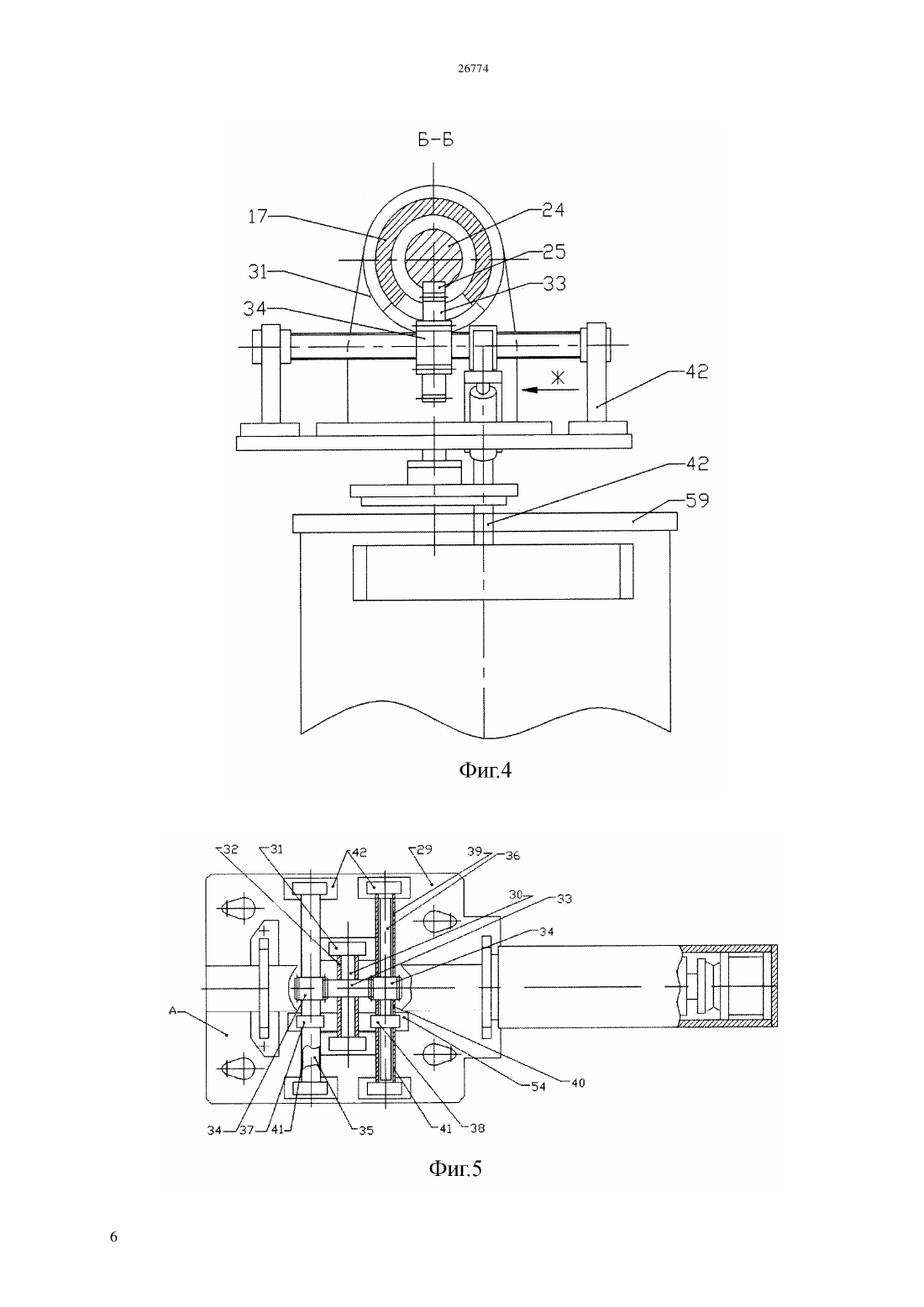
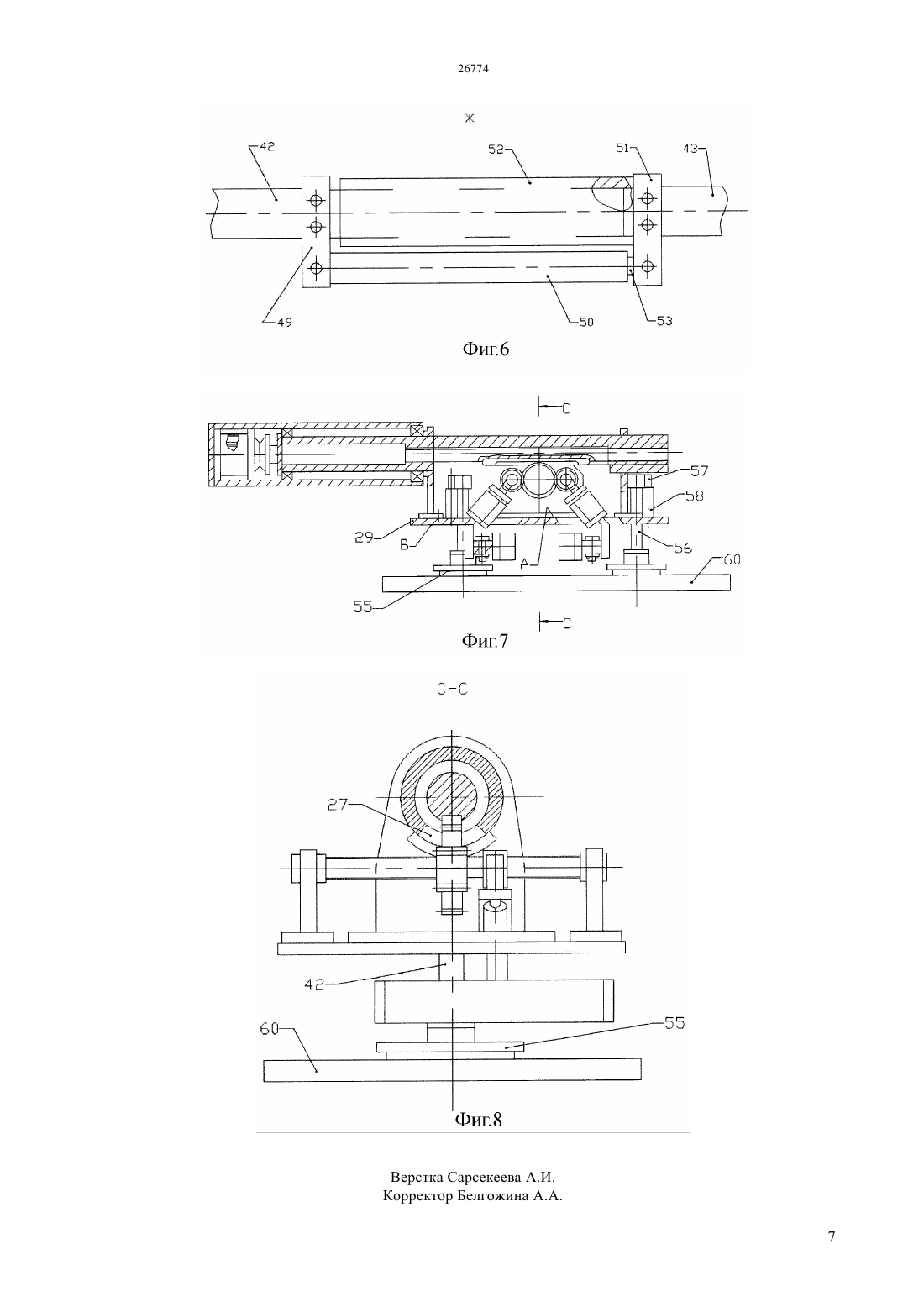
(51) 66 1/44 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ кузнечно-прессового, складского оборудований и выполнения различных технологических операций,в том числе строительных, сборочных и загрузочноразгрузочных операций. Обеспечение повышения производительности за счет многофункциональности и улучшение эксплуатационных характеристик, осуществляется,за счет того, что дополнительно в захватном устройстве для удобства захвата груза введены выдвижные захватные устройства на траверсе и башмаки захватных устройств удлиняются с помощью гидроцилиндров и могут поворачиваться вокруг собственной оси на 180 с помощью гидроцилиндра установленного внутри выдвижной траверсы. Предлагаемое захватное устройство позволяет работать с грузами различной формы и за счет этого повышает производительность всего погрузочного устройства.(72) Туякова Арайлым Сабыровна Нуртазина Баян Хаджи-Мукановна Гаипов Бахытжан Егенбердиева Айгерим Салкынбековна Калмуханбетов Болатжан Естаевич Абдусалямов Нурлан Нурбекович(73) Республиканское государственное предприятие на праве хозяйственного ведения Казахский национальный технический университет им. К.И.Сатпаева Министерства образования и науки Республики Казахстан(54) УНИВЕРСАЛЬНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КРУГЛЫХ И ПЛОСКИХ ТЕЛ Изобретение относится к подъемнотранспортному машиностроению и может быть использовано, для обслуживания металлорежущего,кузнечно-прессового, складского оборудований и выполнения различных технологических операций,в том числе строительных, сборочных и загрузочноразгрузочных операций. Известно устройство А.с СССР 1481188,опубликовано Бюл. 19 от 23.05.89 г., МПК В 66 С 1/44 которое состоит из клещевины, верхние плечи,вал, ось, губок, ограничители и гибким элементом. Работа устройства. Перед захватом груза, губки разведены посредством клещевин между собой, это препятствует их свободному самопроизвольному повороту и фиксирует параллельно друг другу и оси схватываемого груза, что особенно важно перед захватом груза с вертикальной осью. Параллельность губок обеспечивается их поворотом вокруг осей под действием упругого элемента. Свободному самопроизвольному повороту губок препятствует их связь посредством упругого элемента и не соосность валов клещевин, при этом губки имеют четыре устойчивых положения через 90 поворота их вокруг валов, соответствующих устойчивому деформированному положению упругого элемента. Захват груза осуществляется так,чтобы он год действием собственного веса перекантовался из горизонтального положения в вертикальное, что обеспечивает смещением валов от центра тяжести груза, при этом валы клещевин соосны и не препятствуют свободному повороту груза. Отвод губок при размыкании груза происходит параллельно оси груза за счет их поворота вокруг осей под действием упругого элемента, или же предварительного, переведя валы в соосное положение, исключив тем самым сопротивление упругого элемента. Перевод губок для захвата груза в горизонтальном положении производится поворотом их вокруг валов,преодолевая сопротивление упругого элемента. Приведенное грузозахватное устройство предназначено, только для одного вида груза (с круглым сечением) и не работает в автоматическом режиме. Предлагаемое техническое решение направлено на обеспечение повышения производительности за счет многофункциональности и улучшение эксплуатационных характеристик. Обеспечение повышения производительности осуществляется, за счет того, что дополнительно в захватном устройстве для удобства захвата груза введены выдвижные захватные устройства на траверсе и башмаки захватных устройств удлиняются с помощью гидроцилиндров и могут поворачиваться вокруг собственной оси на 180 с помощью гидроцилиндра установленного внутри выдвижной траверсы. Предлагаемое захватное устройство позволяет работать с грузами различной формы и за счет этого повышает производительность всего погрузочного устройства. Описание изобретения. Состоит Для этого универсальное грузозахватное устройство для круглых и плоских тел установленное на самоходном шасси 1 с приводной платформой 2. На цапфах 10, предплечья 5 установлен корпус 11 поворотного силового цилиндра 12 вращательного действия, который шарнирно соединен с двумя дополнительными силовыми цилиндрами 14 ее качения,расположенными шарнирно на предплечье 5. Корпус направляющего 16, соединенная с валом 15 имеет размещенную в ней грузозахватный механизм,17 с установленным в ней дополнительный силовой цилиндр 21 с корпусом 22 вращательного действия, который с помощи вала 20 соединен с грузозахватным механизмом 17. Грузозахватный механизм 17 состоит из силового цилиндра 23, штока 24 с зубчатой рейкой 25. Зубчатая колеса 33 с зубчатой шестерной 34,нарезанный в поверхности которых левый 35 и правый 36 резьбой валами и одетый к этим 35,36 валам, кронштейнами 43 в сборе гайками 37,38,которому с правым 44 и левым 45 башмаками в сборе кронштейны 42 соединяются при помощи пластины 49,51, гильзы 52 и электромагнитов 50. Зубчатая колеса 33 с осью 30 и зубчатая шестерня 34 в сборе с правой 35 и левой 36, резьбой валами установленным к ней гайками 37,38 при помощи кронштейнов угольной плите 29, который в свою очередь закреплен при помощи кронштейнов 28 корпусу 17 грузозахватного механизма. Также к плоской плите 29 установлен в четырех местах вакуумные захваты 55 с штангой 56 и электромагниты 58 с пластинами 57. Работа устройства. Универсальное грузозахватное устройство для круглых и плоских тел работает следующим образом. Выполняется технологическая операция загрузка, например, бочкообразных круглых тел 59 в пространстве или в рабочей зоне находится в различных координатных положениях или плоских тел типа 60 соотношением ширины к длине с 11 до 16 и более, расположенных в стоне. Ручным управлением или по заданной программе для какойто конкретной технологической операции (при наличии системы программного управления),шассейного транспорта 1, поворота платформы 2,плеча 3, предплечья 5, корпус направляющего 16, а вращательное движением силового цилиндра 21 с грузозахватным механизмом 17 и прямолинейного движения силового цилиндра 23 с грузозахватным механизмом 17 переводится в исходное рабочее положение над круглым бочкообразным телом 59 или стопой плоских тел 60. После этого шток 24 в сборе с рейкой 25 силового гидроцилиндра 23 прямолинейного действия перемещается назад, при этом находящиеся в постоянном зацеплении с рейкой 25 зубчатая колеса 33 вращается по часовой стрелке, а с ним на шпонках посаженных правых и левых валах 35,36 находящиеся в постоянном зацеплении зубчатые шестерня 34 будет вращаться в противоположную сторону часовой стрелки. На поверхности этих 35,36 валов, в одном нарезана правая резьба, а во втором левая резьба и закручена в первом с правой резьбой закрепленной к ней планкой 43 гайка 37, а во втором также закрепленной к ней планкой 43 гайка 38, а также к этим 35,36 валам одеты втулки 39,40 и 41. К планке 43 при помощи электромагнита 50 устанавливается (собирается) вторая планка 42 собранный со сменным правым и левым 44,45 башмаками. Правые 35 и левые 36 валы с зубчатыми шестернями 34, правые и левые 37,38 планки,электромагнитами 50, башмаками 44,45 и правой и левой резьбой 37,38 гайками в полном сборе при помощи опорных кронштейнов 42 закрепляется к поверхности А плоской плиты 29. При этом валы 35,36 также будет вращаться в противоположную сторону часовой стрелки,надетые на них валах гайки в сборе с правой и левой резьбой также будет вращаться в ту сторону, но эти гайки 37,38 защемлены по продольной оси валов при помощи втулки 39,40,41, следовательно, в данном случае гайки 37,38 в сборе, совершают встречное вращательное движение, значит изделие 59 зажимается или захватывается. При дальнейшем движений шассейного транспорта 1 или поворота 5,корпуса направляющего 16 или дальнейшего вращения силового цилиндра 21 и вала 15 поворотного гидроцилиндра 12, грузозахватный механизм 17 в сборе с захваченным грузом 59 в пространстве совершает различные сложные движения и выполняет различные конкретные технологические операции. После этого шток 24 с рейкой 25 зубчатое колесо 33 вращается в противоположную сторону часовой стрелки,следовательно, башмаки 44,45 грузозахватного механизма раскрываются или перемещается другдруга и захваченный груз 59 освобождается. дальнейшем универсальное захватное устройство возвращается в исходное положение. Начинается следующий рабочий цикл. В данном универсальном грузозахватном устройстве захват, перенос захваченного тела и расхват плоских тел производится также как осуществлялось с круглым телом, только для этого должны осуществляться следующие дополнительные операции. Для этого рабочее положение грузозахватных башмаков 44,45 поднимать до поверхности Б плоской прямоугольной плиты 29. Это осуществляется путем включения электромагнитов 50 и уменьшается общая рабочая длина планки 42,43, что грузозахватные башмаки 44,45 (для круглых тел 59) вплотную подниматься до поверхности Б плоской прямоугольной плиты 29, а в это время в поверхности Б плоской прямоугольной плиты 29 в четырех местах прямоугольно установленные регулируемые по высоте относительно поверхности Б плоской прямоугольной плиты 29 самоустанавливающиеся вакуумные захваты 55 со штангой 56. Включением там находящиеся электромагниты 58 рабочая длина штангов 56 удлиняется,соответственно расстояние между рабочей поверхностями вакуумного захвата до поверхности Б плоской прямоугольной плиты 29 увеличивается. Следовательно,универсальное,грузозахватное устройство превращается для захвата плоских тел при помощи рабочего вакуумного захвата 55. Изобретение относится к роботостроению и может быть использовано для выполнения сборочно-разборочных, монтажных, погрузочноразгрузочных и транспортных работ, для мест,металлорежущего, металлургического, кузнечнопрессового и складского оборудования, конвейеров,автоматических линий для выполнения различных технологических, строительных и транспортных операций. На фиг.1 - изображен грузозахватное устройство для грузов круглых и плоских тел с транспортным средством, общий вид на фиг.2 -то же, при рабочем положении с круглым телом на фиг.3 - рабочее положение грузозахватного механизма для круглых тел на фиг.4 - разрез Б-Б в положении грузозахватного механизма круглого тела на фиг.5 вид В на фиг.3 на фиг.6 - вид Ж на фиг.4 на фиг.7 рабочее положение грузозахватного механизма для плоских тел на фиг.8 - разрез С-С в положении грузозахватного механизма с плоским телом. Универсальное грузозахватное устройство с транспортным средством содержит самоходное шасси 1 с поворотной платформой 2. Плечо 3 одним концом шарнирно закреплено в опоре 4, платформы 2, а другим концом шарнирно соединено с предплечьем 5. Основные силовые цилиндры 6 привода подъема плеча 3,шарнирно установленными в кронштейнах 7 платформы 2,штоками 8 соединены с плечом 3. Главный цилиндр 9 привода перемещения предплечья 5 шарнирно соединен с плечом 3 и предплечьем 5. На цапфах 10 предплечья 5 установлен корпус 11 поворотного силового цилиндра 12 вращательного действия,шарнирно соединенный со штоками 13 дополнительных силовых цилиндров 14 его качения. Вал 15 поворотного силового цилиндра 12 вращательного действия соединен с корпусом направляющей 16 в которой установлены корпус грузозахватного механизма 17 закрепленной с торцевой крышкой 18, который при помощи подшипников качения 19 совершает вращательное движение относительно направляющего корпуса 16 и соединенный с валом 20 дополнительного силового цилиндра 21 вращательного действия с корпусом 22. В корпусе грузозахватном механизме 17 установлен силовой цилиндр 23 со штоком 24 закрепленной зубчатой рейкой 25 совершающий возвратно-поступательное движение относительно корпуса грузозахватного механизма 17. В противоположном конце рабочего отверстия корпуса грузозахватного механизма 17 длиной на 10 больше, чем максимального рабочего хода штока 24 силового цилиндра 23 запрессована втулка 26, в ней перемещается второй конец штока 24,также в корпусе грузозахватного механизма 17 имеется продольное отверстие 27 длиной больше,чем на 10 максимального рабочего хода штока 24 3 силового цилиндра 23 для проводного колеса 33 грузозахватного устройства. К корпусу грузозахватного механизма 17 при помощи двух кронштейнов 27 установлена плоская прямоугольная плита 29, которому закреплена с осью 30 и с двух сторон кронштейнами 31 и втулками 32, приводная колеса 33 грузозахватного устройства, который состоит из двух ведомых зубчатых шестерен 34 на шпонках установленный к левому 35 с левой резьбой и правому 36 с правой резьбой валах, и установленным с правой и левой резьбой гайками 37,38 и втулки 39,40,41 не дает по продольной оси валов 35,36 перемещаться зубчатых шестерен 34 и гайки 37,38 с левой и правой резьбой относительно опорных кронштейнов 42 и валов 35,36. Гайкам 37,38 справой и левой резьбой приварены(прикреплены) планки 42, а втором конце этих планок установлены левосторонние 43 и правосторонние 44 сменные башмаки, форма башмаков зависят от внешней формы захватываемых предметов, например, башмаки 43,44 рассчитаны для круглых тел. Башмаки закрепляются к планкам при помощи пальцев 46 с плоскими шайбами 47 и шплинтами 48. Планки 42 с одним концом закреплены справо и левосторонней резьбой гайками 37,38 , а на другом конце на расстоянии 1,2 или на 20 больше, чем от длинымаксимального рабочего хода планки и перпендикулярно к длине планки 42 закреплена пластина 49 с шарнирно соединенным к нему электромагнитом 50, длиноймаксимального рабочего хода, а в другом конце противоположной планки 43 перпендикулярно к его длине закреплен пластина 51 с установленным гильзой 1,2 прямоугольным отверстием и якорем 53 электромагнита. Для установки грузозахватного устройства в сборе в плоской прямоугольной плите 29 проделана продольное прямоугольное сквозное отверстие 54. Также на поверхности Б плоской плиты 29 в четырех местах прямоугольно установлены регулируемые по высоте относительно поверхности Б, самоустанавливающиеся вакуумные захваты 55 со штангой 56, а в торцевой части штанги 56 закреплен пластина 57 с электромагнитом 58 для регулирования высоты установки вакуумного грузозахвата 55 относительно поверхности Б плоской прямоугольной плиты 29. ФОРМУЛА ИЗОБРЕТЕНИЯ Универсальное грузозахватное устройство для круглых и плоских тел, содержащее башмаки с захватными устройствами, отличающееся тем, что дополнительно установлены вакуумные выдвижные захваты на траверсе, а башмаки захватных устройств имеют возможность удлиняться с помощью гидроцилиндров и могут поворачиваться вокруг собственной оси на 180 с помощью гидроцилиндра установленного внутри выдвижной траверсы.
МПК / Метки
МПК: B66C 1/44
Метки: плоских, тел, устройство, грузозахватное, круглых, универсальное
Код ссылки
<a href="https://kz.patents.su/7-ip26774-universalnoe-gruzozahvatnoe-ustrojjstvo-dlya-kruglyh-i-ploskih-tel.html" rel="bookmark" title="База патентов Казахстана">Универсальное грузозахватное устройство для круглых и плоских тел</a>
Универсальное грузозахватное устройство
Номер инновационного патента: 26773
Опубликовано: 15.04.2013
Авторы: Сабденова Ауес Шадихановна, Боровский Алексей Юрьевич, Никулин Эдуард Николаевич, Аятбекова Асем Кумарбековна, Жаикбаева Дина Махсудовна, Абдусалямов Нурлан Нурбекович, Өтепбергенов Ерқанат Байдуллаевич
МПК: B66C 1/44
Метки: универсальное, устройство, грузозахватное
Формула / Реферат:
Изобретение относится к области машиностроения, в частности к подъемно-транспортным механизмам и предназначено для подъема, транспортировки и разгрузки грузов различных форм размеров и конфигураций. Повышение производительности грузозахватного устройства осуществляется путем расширения диапазона захватываемых грузов. Поставленная задача осуществляется за счет применения силовых цилиндров поворота челюстей, позволяющих поворачивать челюсти из...
Устройство для пространственной ориентации плоских деталей
Номер предварительного патента: 8124
Опубликовано: 15.11.1999
Авторы: Сахыбаев Ратбек Тельгараевич, Шершнев Владимир Николаевич
МПК: B65G 47/24
Метки: пространственной, ориентации, плоских, устройство, деталей
Формула / Реферат:
Устройство для пространственной ориентации плоских деталей относится к легкой промышленности, а именно к устройствам для автоматизации вспомогательных операций, выполняемых при обслуживании проходных технологических машин, а также и в других отраслях, где обработка плоских деталей связана с пространственной ориентацией. Повышение надежности работы устройства достигается тем, что в устройстве для пространственной ориентации плоских деталей,...
Грузозахватное устройство
Номер патента: 173
Опубликовано: 20.12.1993
Авторы: Сокрута Лариса Викторовна, Мельграф Густав Яковлевич, Насретдинов Эдуард Константинович, Апарин Олег Николаевич
МПК: B66C 1/42
Метки: грузозахватное, устройство
Формула / Реферат:
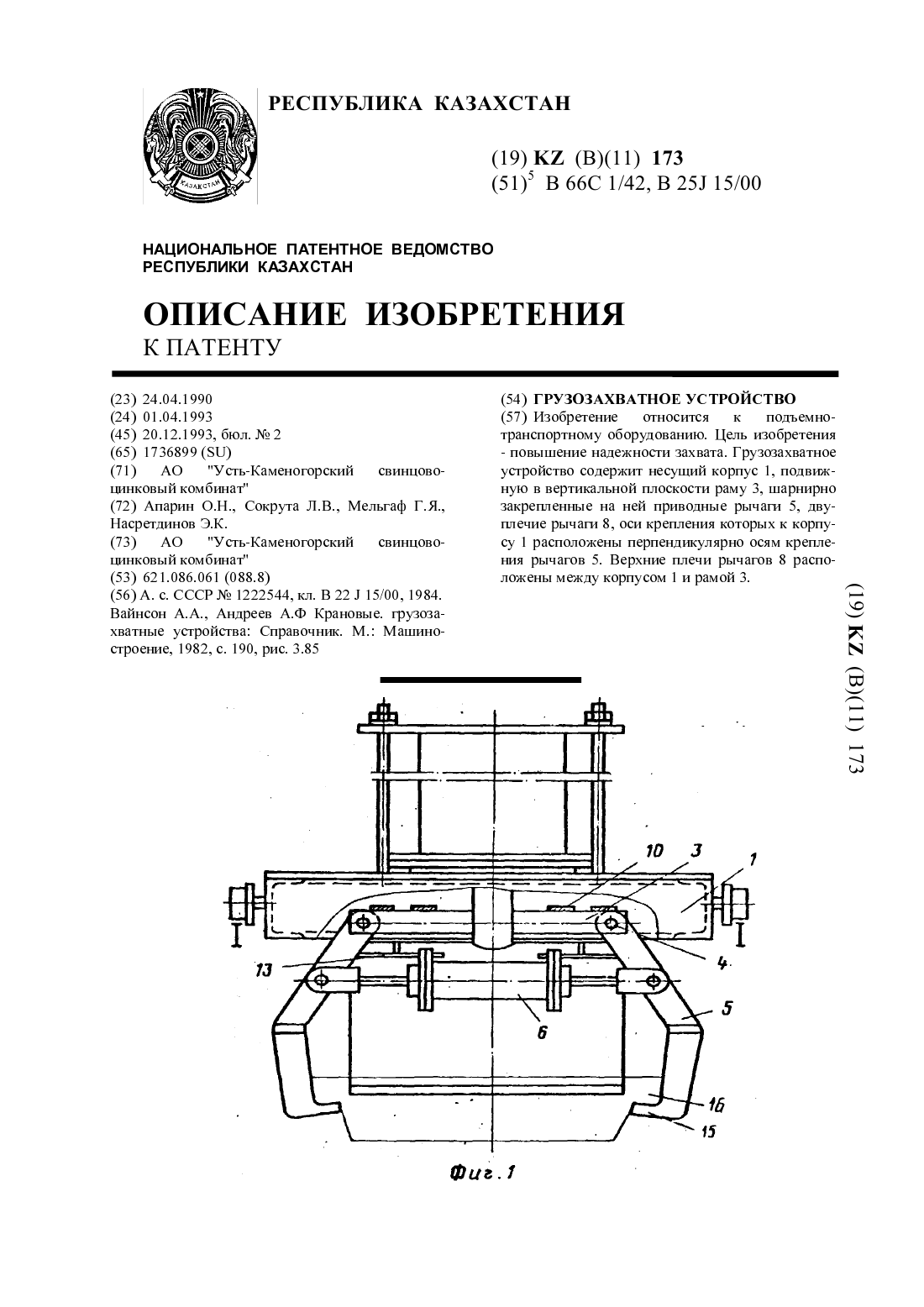
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повышение надежности захвата. Грузозахватное устройство содержит несущий корпус 1, подвижную в вертикальной плоскости раму 3, шарнирно закрепленные на ней приводные рычаги 5, двуплечие рычаги 8, оси крепления которых к корпусу 1 расположены перпендикулярно осям крепления рычагов 5. Верхние плечи рычагов 8 расположены между корпусом 1 и рамой 3.
Устройство для переворота плоских деталей
Номер предварительного патента: 2989
Опубликовано: 15.03.1996
Авторы: Сахыбаев Ратбек Тельгараевич, Шершнев Владимир Николаевич
МПК: B65G 47/24
Метки: переворота, деталей, плоских, устройство
Формула / Реферат:
Изобретение относится к легкой промьшенности, а именно к устройствам для автоматизации вспомогательных операций, выполняемых при обслуживании проходных технологических машин, и предназначенных для переворачивания плоских деталей в процессе их межоперационного перемещения, а также и в других отраслях, где обработка плоских деталей связана с переворотом.Устройство для переворота плоских деталей включает подающий и приемный конвейеры. Новизна...
Устройство для полирования плоских поверхностей
Номер предварительного патента: 17220
Опубликовано: 14.04.2006
Авторы: Хижняк Валерий Васильевич, Хижняк Василий Васильевич
МПК: B24B 37/04
Метки: плоских, устройство, поверхностей, полирования
Формула / Реферат:
Изобретение относится к абразивной обработке и может быть использовано при доводке плоских поверхностей различных деталей.Задачами, на решение которых направлено предлагаемое изобретение, являются повышение производительности устройства и повышение точности обработки поверхностей, т. е. устранение зависимости точности обработки плоских поверхностей от угла наклона доводочного диска к горизонту.Устройство для полирования плоских поверхностей...
Предыдущий патент: Универсальное грузозахватное устройство
Следующий патент: Грузоподъемный кран с гидравлическим поворотным механизмом
Случайный патент: Способ подготовки сульфидных концентратов меди и свинца к обжигу