Велосипед Сазанбаева (Sazan bike)
Формула / Реферат
Велосипед Сазанбаева (Sazan bike).
Изобретение относится к велосипедам, имеющим два и более колес и рулевую ось.
Целью изобретения является освобождение рук велосипедиста от управления велосипедом для использования их в ручном приводе, а также для возможности пользования велосипедом безрукими инвалидами.
Для управления велосипедом осуществлена кинематическая связь между положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста помощью тросовой передачи, гидропередачи, вала вращения или упоров
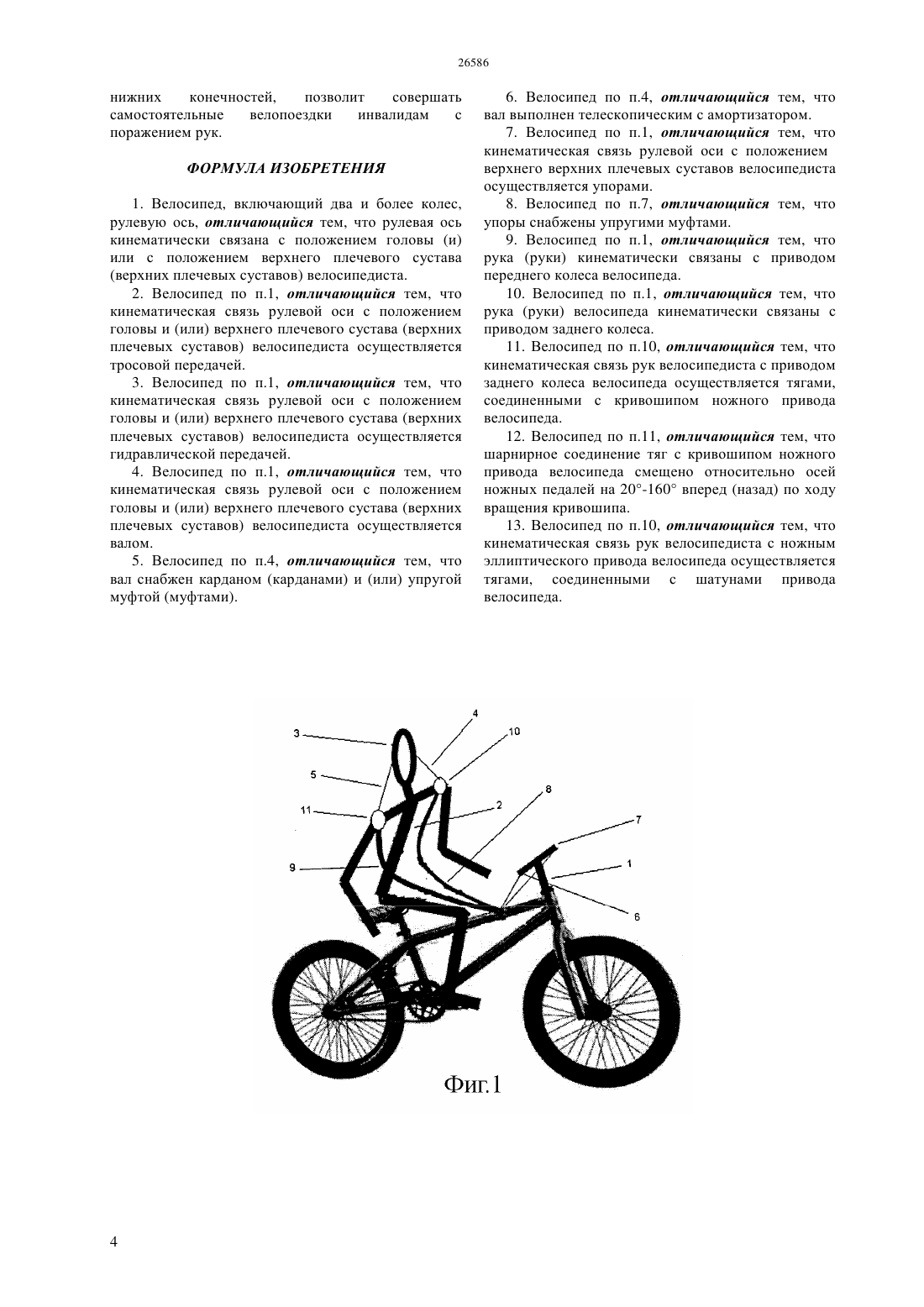
Велосипедист 2 (рис.1) одевает на голову велосипедный шлем 3, со единенный тросиками 4 и 5 (например тормозными) с рычагами 6 и 7 рулевой оси 1 велосипеда. Оплетки 8 и 9 тросиков укреплены с помощью пройм 10 и 11 на верхних плечевых суставах велосипедиста 2, а также на верхней балке рамы велосипеда. При наклоне головы в стороны один из тросов натягивается, а другой ослабляется, что приводит к повороту рулевой оси велосипеда.
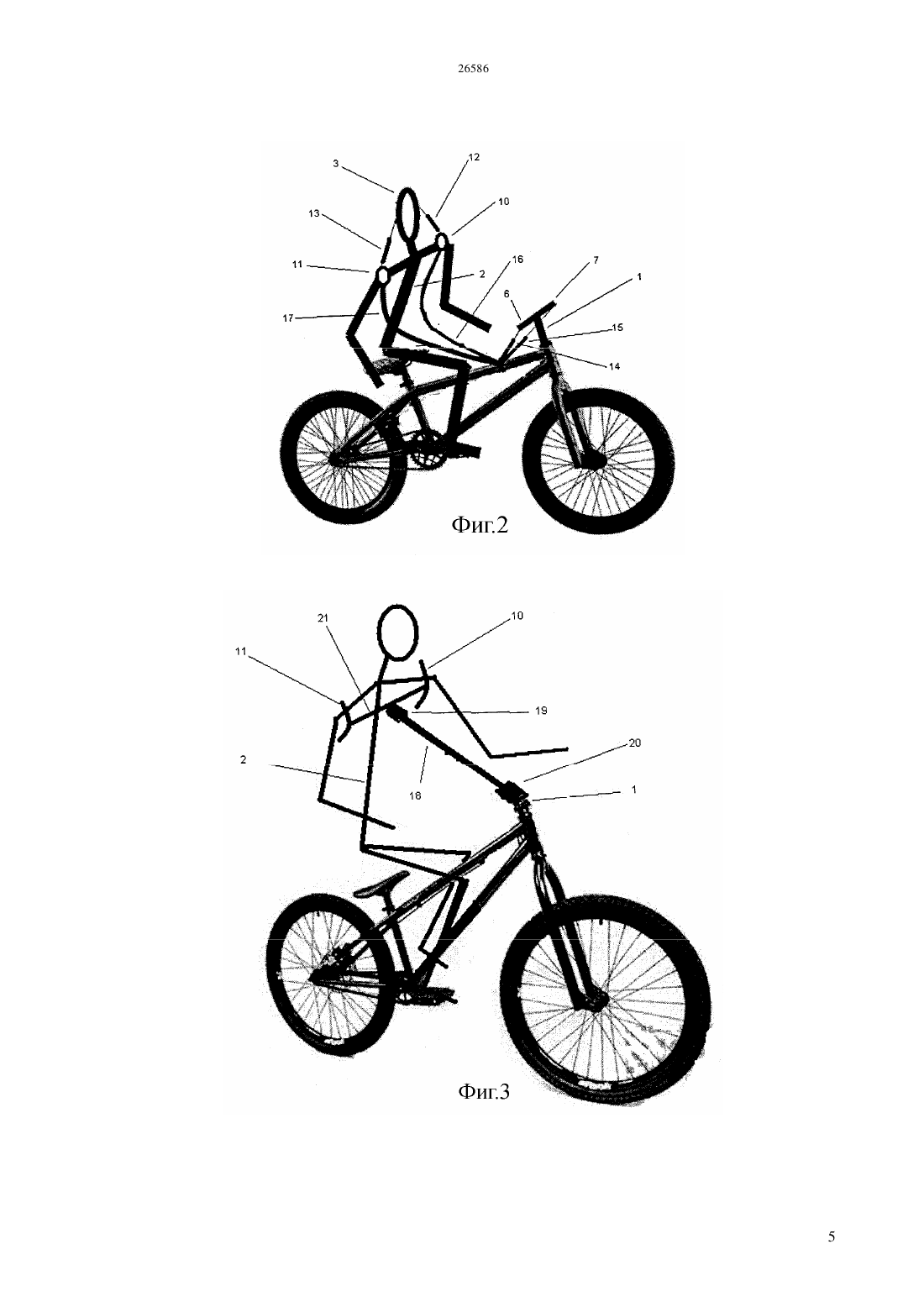
Поворот рулевой оси может производиться гидравлической переда чей (рис.2), ведущие гидроцилиндры 12 и 13 которой сжимаются (разжимаются ) между шлемом 3 и верхними плечевыми суставами велосипедиста, а ведомые гидроцилиндры 14 и 15 поворачивают рычаги б и 7 рулевой оси.
С помощью вала 18 (рис. 3) можно непосредственно вращать рулевую ось 1 путем поворота верхних плечевых суставов относительно тела велосипедиста.
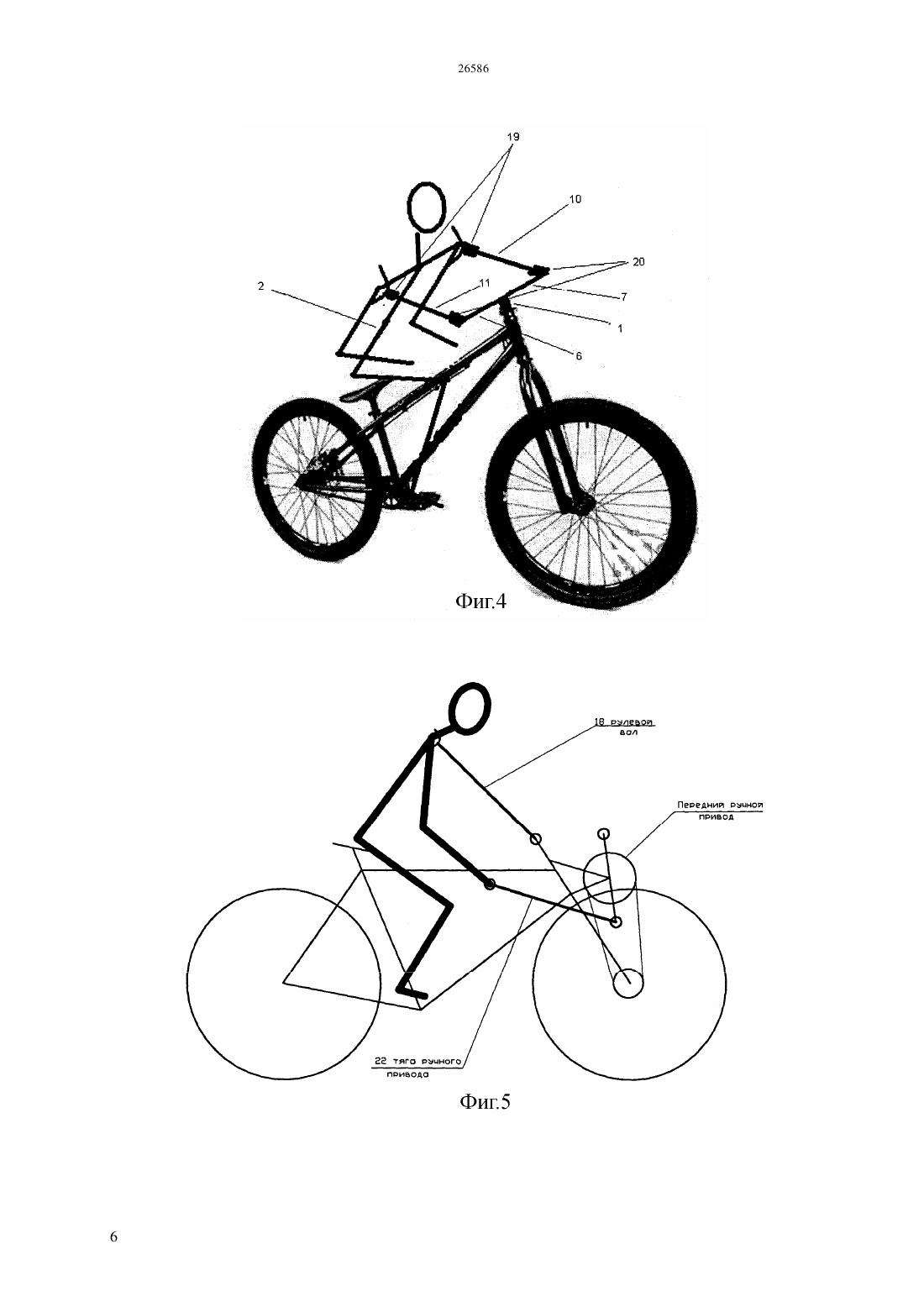
Через упоры 10 и 11 (рис. 4) можно поворачивать руль велосипеда путем поворота верхних плечевых суставов вокруг вертикальной оси.
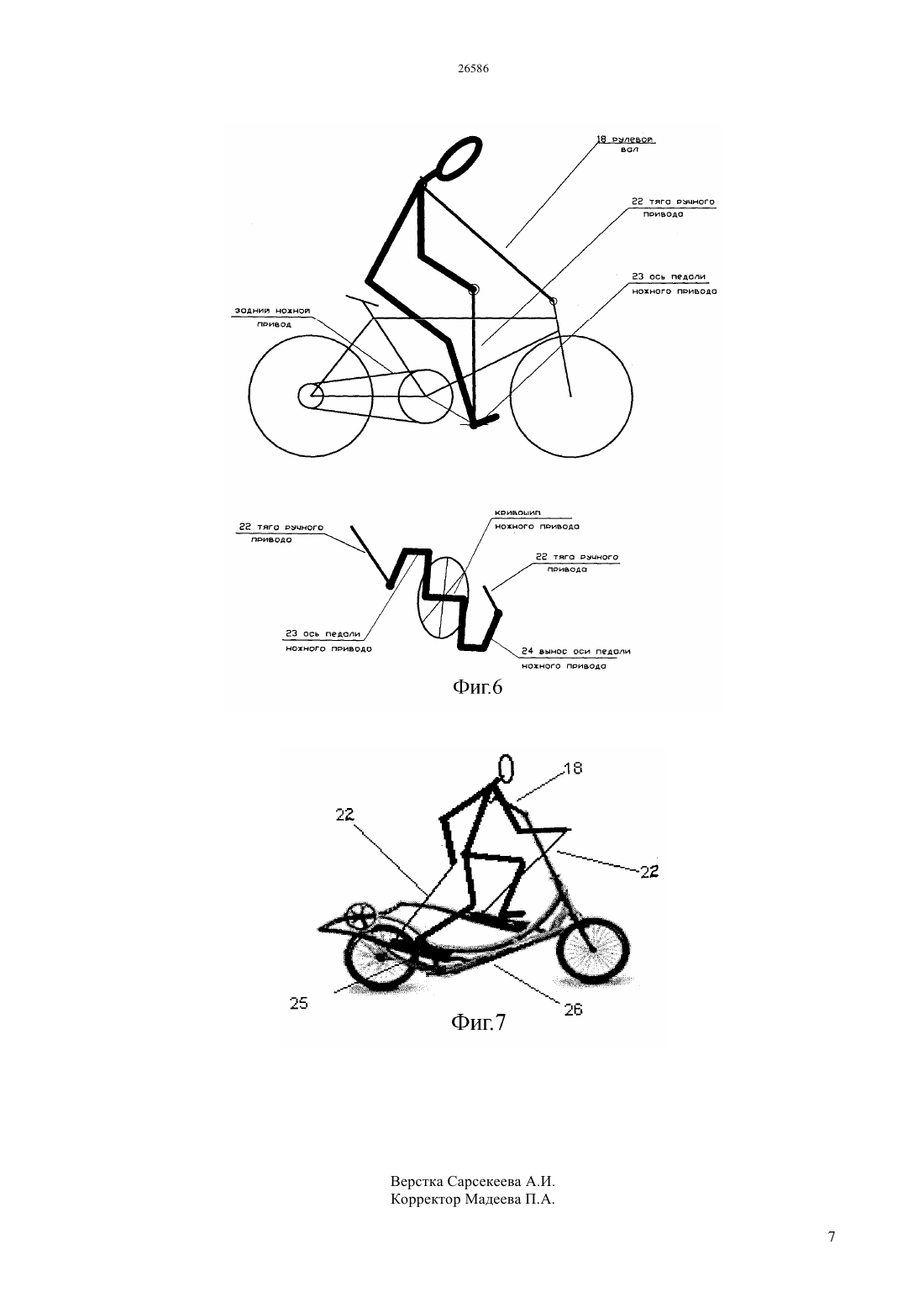
Свободные руки могут вращать привод переднего колеса (рис.5), либо через тяги 22 (рис.6) вращать привод заднего колеса велосипеда. Если шарниры крепления тяг 22 к кривошипу сместить относительно педалей ножного привода на 90°, то руки и ноги велосипедиста будут взаимно облегчать друг другу прохождение нижних и верхних «мертвых точек».
Тяги 22 (рис.7) можно крепить к шатунам (педалям) 25 эллиптических велосипедов, создав на них, тем самым, «лыжный ход»
Устройство позволит гармонично использовать все мышцы велосипедиста. Оно облегчит инвалидам использование велосипеда.
Текст
(51) 62 3/00 (2006.01) 62 3/16 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ Поворот рулевой оси может производиться гидравлической передачей(разжимаются) между шлемом 3 и верхними плечевыми суставами велосипедиста, а ведомые гидроцилиндры 14 и 15 поворачивают рычаги 6 и 7 рулевой оси. С помощью вала 18(фиг.3) можно непосредственно вращать рулевую ось 1 путем поворота верхних плечевых суставов относительно тела велосипедиста. Через упоры 10 и 11 (фиг.4) можно поворачивать руль велосипеда путем поворота верхних плечевых суставов вокруг вертикальной оси. Свободные руки могут вращать привод переднего колеса (фиг.5), либо через тяги 22 (фиг.6) вращать привод заднего колеса велосипеда. Если шарниры крепления тяг 22 к кривошипу сместить относительно педалей ножного привода на 90, то руки и ноги велосипедиста будут взаимно облегчать друг другу прохождение нижних и верхних мертвых точек. Тяги 22 (фиг.7) можно крепить к шатунам(педалям) 25 эллиптических велосипедов, создав на них, тем самым, лыжный ход. Устройство позволит гармонично использовать все мышцы велосипедиста. Оно облегчит инвалидам использование велосипеда.(56) Статья Велосипед Большая советская энциклопедия,Москва изд. Советская энциклопедия, 1978(57) Изобретение относится к велосипедам,имеющим два и более колес и рулевую ось. Целью изобретения является освобождение рук велосипедиста от управления велосипедом для использования их в ручном приводе, а также для возможности пользования велосипедом безрукими инвалидами. Для управления велосипедом осуществлена кинематическая связь между положением головы и(или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста с помощью тросовой передачи, гидропередачи, вала вращения или упоров Велосипедист 2 (фиг.1) одевает на голову велосипедный шлем 3, соединенный тросиками 4 и 5 (например тормозными) с рычагами 6 и 7 рулевой оси 1 велосипеда. Оплетки 8 и 9 тросиков укреплены с помощью пройм 10 и 11 на верхних плечевых суставах велосипедиста 2, а также на верхней балке рамы велосипеда. При наклоне головы в стороны один из тросов натягивается, а другой ослабляется, что приводит к повороту рулевой оси велосипеда. Изобретение относится к велосипедам, имеющим два и более колес. Известен обычный велосипед,управление которым обеспечивается рулевой осью,поворачиваемой руками велосипедиста посредством руля (см. статья Велосипед в Большой Советской Энциклопедии,Москва изд. Советская энциклопедия, 1969-1978 г.) Недостатком этого велосипеда, является то, что руки велосипедиста постоянно заняты управлением велосипедом, что не позволяет полноценно использовать их во время движения в других целях например для приведения во вращение ведущих колес велосипеда (для ручного привода велосипеда). Таким велосипедом не могут пользоваться инвалиды с нарушенной функцией рук. Целью изобретения является освобождение рук велосипедиста от управления направлением движения велосипеда. Эта цель достигается тем, что в известном велосипеде, включающем колеса и рулевую ось,последняя кинематически связана с положением головы (и) или с положением верхнего плечевого сустава (верхних плечевых суставов) велосипедиста. Кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется тросовой передачей. Кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется гидравлической передачей. Кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется валом вращения. Кинематическая связь рулевой оси с положением верхних плечевых суставов велосипедиста осуществляется упорами. С целью повышения полезной мощности велосипедиста его руки кинематически связаны с приводом переднего колеса велосипеда. С целью упрощения передачи мощности рук ведущему колесу велосипеда руки кинематически связаны с ножным приводом велосипеда. Кинематическая связь рук велосипедиста с ножным приводом осуществляется с помощью тяг,соединенных с кривошипом ножного привода велосипеда. Соединение тяг с кривошипом ножного привода велосипеда смещено относительно ножных педалей на 20-160 вперед (назад) по ходу вращения кривошипа. Кинематическая связь рук велосипедиста с ножным приводом эллиптического велосипеда осуществляется с помощью тяг, соединенных с педалью (шатуном) этого привода велосипеда. На фиг.1 изображен велосипед, рулевая ось которого кинематически связана с положением головы (и) или с положением верхних плечевых суставов велосипедиста тросовой передачей . На фиг.2 изображен велосипед, рулевая ось которого кинематически связана с положением головы (и) или с положением верхнего плечевого 2 сустава (верхних плечевых суставов) велосипедиста гидравлической передачей. На фиг.3 изображен велосипед, рулевая ось которого кинематически связана с положением головы (и) или с положением верхнего плечевого сустава (верхних плечевых суставов) велосипедиста валом. На фиг.4 изображен велосипед, рулевая ось которого кинематически связана с положением верхних плечевых суставов велосипедиста упорами. На фиг.5 изображен велосипед в котором свободные руки велосипедиста кинематически связаны с приводом переднего колеса велосипеда. На фиг.6 изображен велосипед в котором свободные руки велосипедиста руки с помощью тяг кинематически связаны с кривошипным механизмом ножного привода велосипеда. Шарнирное соединение тяг с кривошипным механизмом ножного привода велосипеда может иметь угловое смещение относительно ножных педалей назад (вперед) по ходу вращения кривошипа. На фиг.7 изображен эллиптический велосипед в котором свободные руки велосипедиста руки с помощью тяг кинематически связаны с педалями(шатунами) ножного эллиптического привода велосипеда. Левый 4 и правый 5 тросики тросовой передачи на фиг.1 (обычные велосипедные тормозные тросики) одними концами закреплены на правом 6 и левом 7 рулевых рычагах (рычаги жестко соединены с рулевой осью 1 велосипеда ), а другими концами со шлемом 3 велосипедиста 2. Оплетки 8 и 9 тросиков одними концами соединены с верхней балкой рамы велосипеда, а другими концами с помощью пройм 10 и 11 с левым и правым верхними плечевыми суставами велосипедиста 2. Управляют велосипедом следующим образом для поворота налево велосипедист наклоняет голову(шлем 3) к своему левому верхнему плечевому суставу (к пройме 10), натягивая тем самым правый 5 и освобождая левый 4 тросик тросовой передачи. Правый тросик 5 натягиваясь, проворачивает через левый рулевой рычаг 7 рулевую ось 1 влево. Соответственно, при наклоне головы (шлема) вправо натягивается левый тросик 4 тросовой передачи, который поворачивает через правый рулевой рычаг 6 рулевую ось 1 вправо. Достаточная длина оплеток 8 и 9 тросиков позволит велосипедисту беспрепятственно наклонять свой корпус вправо-влево, а также смещать его впердназад и вверх-вниз. Левый 12 и правый 13 ведущие гидроцилиндры(фиг.2) гидравлической передачи шарнирно соединены с помощью пройм 10 и 11 с верхними плечевыми суставами велосипедиста, а их штоки со шлемом 3 велосипедиста. Ведомые гидроцилиндры 14 и 15 гидравлической передачи шарнирно соединены с верхней балкой рамы велосипеда, а их штоки - с правым 6 и левым 7 рычагами рулевой оси 1. Ведущие гидроцилиндры 12 и 13 перекрестно соединены с ведомыми гидроцилиндрами 14 и 15 гибкими шлангами 16 и 17. Функционирует гидравлическая передача следующим образом для поворота налево велосипедист наклоняет голову (шлем 3) к левому верхнему плечевому суставу велосипедиста (к пройме 10), сжимая тем самым левый 12 и разжимая правый 13 ведущие гидроцилиндры. Под давлением жидкости шток правого ведомого гидроцилиндра 14 давит на правый рычаг 6 рулевой оси 1,поворачивая, тем самым е влево. Соответственно,при наклоне головы (шлема) вправо гидропередача обеспечивает поворот велосипеда направо. Вместо наклонов головы к неподвижным плечевым суставам велосипедиста можно соответственно поднимать (опускать) эти суставы (проймы 10 и 11) относительно неподвижной головы велосипедиста. Применяя гидроцилиндры двустороннего действия можно сократить их число в гидропередаче в два раза. Гибкие шланги 16 и 17 позволяют велосипедисту беспрепятственно наклонять свой корпус вправо-влево, а также смещать его впердназад и вверх-вниз. Вал вращения 18 (фиг.3) соединен карданными передачами или упругими муфтами 19 и 20 с рулевой осью 1 с одной стороны и с центром коромысла 21 - с другой стороны. Концы коромысла 21 снабжены упорами 10 и 11 для верхних плечевых суставов велосипедиста. Вал вращения 18 может быть выполнен телескопическим с встроенным внутри него амортизатором. Для поворота направо велосипедист поднимает верхними плечевыми суставами левый упор 10 и опускает правый 11. Коромысло 21 поворачивается вокруг своего центра по часовой стрелке, передавая через упругую муфту (кардан) 19 вращение валу 18. Вал 18 через упругую муфту (кардан) 20 поворачивает направо рулевую ось 1. Поворот же велосипедистом коромысла 21 против часовой стрелки приведет к повороту велосипеда влево. Упругие муфты (карданы) 19 и 20 позволяют велосипедисту беспрепятственно наклонять свой корпус вправо-влево и поднимать его вверх-вниз, а телескопичность вала - смещать корпус впердназад. Амортизатор внутри телескопического вала 18 смягчит динамические воздействия на тело велосипедиста. Рулевые упоры 10 и 11 (фиг.4) соединены через упругие муфты 19 и 20 с рычагами 6 и 7 рулевой оси 1. Для поворота налево велосипедист 2 подает вперед правый верхний плечевой сустав, толкая правый рулевой упор 11, а вместе с ней правый рулевой рычаг 6 вперд. Рулевая ось 1 поворачивается против часовой стрелки,поворачивая тем самым велосипед налево. Напротив, толкая левым верхним плечевым суставом левый рулевой упор 10, велосипедист через левый рулевой рычаг 7 поворачивает рулевую ось по часовой стрелке. Упругие муфты 19 и 20 позволяют велосипедисту беспрепятственно наклонять свой корпус вправо-влево и смещать его вверх-вниз. Во всех показанных на фиг.1-4 случаях длину рулевых рычагов 6 и 7 можно сделать достаточно большой для резервного перехода на обычный(ручной) способ управления велосипедом. На фиг.5 свободные руки велосипедиста через тяги 22 вращают привод переднего колеса велосипеда (для упрощения рисунка показана только правая сторона велосипеда). При этом руки велосипедиста могут работать независимо от движений его ног, но наличие механизма переднего привода усложняет конструкцию велосипеда и утяжеляет его вес. В связи с этим целесообразно тяги 22 прикреплять (шарнирно) к осям 23 педалей его ножного привода (см. фиг.6). Велосипедист,управляя велосипедом верхними плечевыми суставами и (или) головой, воздействует своими руками через тяги 22 на кривошип привода заднего колеса велосипеда, увеличивая на нем полезный крутящий момент. При прикреплении тяг 22 к осям 23 ножных педалей силовые движения рук и ног синфазны,нижняя и верхние мертвые точки воздействия ног и рук на кривошип привода совпадают, что отрицательно сказывается на плавности хода велосипеда. Если тяги 22 прикрепить с угловым смещением от осей 23 ножных педалей (например на выносах осей 23 со смещением 90 вперед или назад от педалей), то при нахождении ног в верхней и нижней мертвых точках ручные тяги 22,напротив, будут воздействовать на кривошип в зоне максимальных крутящих моментов, что облегчит вывод ножных педалей из мертвых точек. И наоборот, при нахождении концов ручных тяг 22 в нижней и верхней мертвых точках, ножные педали будут воздействовать на кривошип в зоне максимальных крутящих моментов, что облегчит вывод ручных тяг 22 из мертвых точек. В результате привод заднего колеса велосипеда будет работать плавно, с максимальной эффективностью. В эллиптических велосипедах, ножные педали которого выполнены в виде шатунов 25 (см. фиг.7),передние концы которых движутся по образующей 26, а задние концы шарнирно закреплены в кривошипах привода заднего колеса (велосипед) тяги 22 можно шарнирно соединять с этими педалями (шатунами) 25. Движение рук велосипедиста будет аналогично движению рук лыжника с лыжными палками, что соответствует движению ног велосипедиста на таком велосипеде. В отличие от лыжника велосипедист может не только отталкивать от себя педали, но и тянуть их на себя, что повысит плавность и эффективность работы такого привода. Применение предлагаемого изобретения позволит полноценно, без отвлечения на функции управления, использовать руки велосипедиста в силовом приводе велосипеда. Это увеличит скорость и дальность велопоездок,будет способствовать гармоничному развитию мышц велосипедиста. Это техническое решение облегчит использование велосипеда инвалидам с поражением 3 нижних конечностей,позволит совершать самостоятельные велопоездки инвалидам с поражением рук. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Велосипед, включающий два и более колес,рулевую ось, отличающийся тем, что рулевая ось кинематически связана с положением головы (и) или с положением верхнего плечевого сустава(верхних плечевых суставов) велосипедиста. 2. Велосипед по п.1, отличающийся тем, что кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется тросовой передачей. 3. Велосипед по п.1, отличающийся тем, что кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется гидравлической передачей. 4. Велосипед по п.1, отличающийся тем, что кинематическая связь рулевой оси с положением головы и (или) верхнего плечевого сустава (верхних плечевых суставов) велосипедиста осуществляется валом. 5. Велосипед по п.4, отличающийся тем, что вал снабжен карданом (карданами) и (или) упругой муфтой (муфтами). 6. Велосипед по п.4, отличающийся тем, что вал выполнен телескопическим с амортизатором. 7. Велосипед по п.1, отличающийся тем, что кинематическая связь рулевой оси с положением верхнего верхних плечевых суставов велосипедиста осуществляется упорами. 8. Велосипед по п.7, отличающийся тем, что упоры снабжены упругими муфтами. 9. Велосипед по п.1, отличающийся тем, что рука (руки) кинематически связаны с приводом переднего колеса велосипеда. 10. Велосипед по п.1, отличающийся тем, что рука (руки) велосипеда кинематически связаны с приводом заднего колеса. 11. Велосипед по п.10, отличающийся тем, что кинематическая связь рук велосипедиста с приводом заднего колеса велосипеда осуществляется тягами,соединенными с кривошипом ножного привода велосипеда. 12. Велосипед по п.11, отличающийся тем, что шарнирное соединение тяг с кривошипом ножного привода велосипеда смещено относительно осей ножных педалей на 20-160 вперед (назад) по ходу вращения кривошипа. 13. Велосипед по п.10, отличающийся тем, что кинематическая связь рук велосипедиста с ножным эллиптического привода велосипеда осуществляется тягами, соединенными с шатунами привода велосипеда.
МПК / Метки
Метки: велосипед, сазанбаева, bike, сазан
Код ссылки
<a href="https://kz.patents.su/7-ip26586-velosiped-sazanbaeva-sazan-bike.html" rel="bookmark" title="База патентов Казахстана">Велосипед Сазанбаева (Sazan bike)</a>
Спортивный велосипед
Номер предварительного патента: 139
Опубликовано: 20.12.1993
Автор: Сазанбаев Саин Кушерович
МПК: B62M 1/12
Метки: спортивный, велосипед
Формула / Реферат:
Изобретение относиться к спортивным велосипедам имеющим ножной и ручной мускульные приводы.Цель изобретения - снижение веса и габаритов велосипеда. Велосипед состоит из рамы 1, заднего колеса 2 с расположенным за ним ножным приводом 3, переднего рулевого колеса 4 с расположенным перед ним ручным приводом 7. Ручной привод 7 смонтирован на выносе 6 рулевой вилки 5. На раме 1 укреплены мягкие упоры 8 для туловища и головы велосипедиста. Новым в...
Велосипед Втулкина
Номер предварительного патента: 18615
Опубликовано: 16.07.2007
Автор: Втулкин Александр Павлович
МПК: B62K 3/00, B62M 1/00, B62K 21/00...
Формула / Реферат:
Изобретение относится к одноколейным индивидуальным транспортным средствам, приводимым в движение мускульной энергией человека - велосипедам, предназначенным для прогулок, деловых встреч и велоспорта.Технический результат изобретения - повышение КПД использования мускульной энергии человека в приводе заднего ведущего колеса велосипеда за счет использования ручного привода в кинематике привода заднего колеса, как при совместном его взаимодействии...
Велосипед Втулкина для перевозки грузов, пассажиров (варианты)
Номер предварительного патента: 19271
Опубликовано: 15.04.2008
Автор: Втулкин Александр Павлович
МПК: B62K 7/00
Метки: велосипед, грузов, пассажиров, втулкина, варианты, перевозки
Формула / Реферат:
Изобретение относится к транспортным средствам, приводимым в действие мускульной силой человека - велосипедам, предназначенным для перевозки грузов, пассажиров.Технический результат изобретения - расширение функциональных возможностей, повышение маневренности и упрощение конструкции и достигается за счет установки к передней части рамы двухколесного велосипеда промышленного типа модели транспортной грузо-пассажирской коляски, состоящей из...
Велосипед Втулкина
Номер патента: 23254
Опубликовано: 15.11.2010
Автор: Втулкин Александр Павлович
МПК: B62K 21/00, B62M 1/12, B62K 3/00...
Формула / Реферат:
Изобретение относится к одноколейным индивидуальным транспортным средствам, приводимым в движение мускульной энергией человека - велосипедам, предназначенным для прогулок, деловых встреч и велоспорта.Техническим результатом изобретения является повышение компактности за счет упрощения конструкции, а также повышение маневренности и безопасности эксплуатации и достигается тем, что велосипед снабжен ручным приводом с цепной передачей на педальный...
Водный велосипед
Номер инновационного патента: 19913
Опубликовано: 15.08.2008
Автор: Халидуллин Олег Ханышевич
МПК: B63H 16/18
Формула / Реферат:
Изобретение относится к мелкому судо-строению, в частности к конструкции водного велосипеда.Технический результат достигаемый изобре-тением заключается в расширении технических возможностей водного велосипеда, а именно в приобретении функции въезда в воду, выезда на берег, перемещения по суше и воде и, одновременно, в упрощении конструкции привода велосипеда.Водный велосипед включает (фиг.1) раму 1, расположенную вдоль его продольной оси, с...
Предыдущий патент: Способ контроля герметичности системы питания воздухом двигателя внутреннего сгорания с турбонаддувом и устройство для его осуществления
Следующий патент: Способ получения гексафторсиликата аммония
Случайный патент: Состав для таблеток