Способ определеия наличия нарушителя
Номер инновационного патента: 29480
Опубликовано: 15.01.2015
Авторы: Рутгайзер Олег Зиновьевич, Аршидинова Наргиз Туглукжановна
Формула / Реферат
СПОСОБ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ НАРУШИТЕЛЯ Б¥ЗУШЫНЬЩ БАР БКЕНД1Г1Н АНЬЩТАУ ТЭС1Л1
Изобретение относится к радиолокации, в частности к системам охранной сигнализации, к способам контроля наличия нарушителя в контролируемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра охраняемой зоны.
Задачей изобретения является разработка способа определения наличия нарушителя, позволяющего контролировать факт пересечения контролируемой зоны с высокой достоверностью обнаружения нарушителя.
Техническим результатом изобретения является возможность фиксации нарушителя и увеличение надежности определения наличия нарушителя при его реальных размерах и наличии быстрых замираний сигнала, что повышает достоверность определения наличия нарушителя.
В предлагаемом способе оценку наличия нарушителя в охраняемой зоне выполняют с использованием двух статистических характеристик мощности сигнала на входе приемника, получаемых на основе фиксированного числа измерений входного сигнала приемника и фиксированного интервала времени между измерениями.
Таким образом, предлагаемый способ определения наличия нарушителя в контролируемой зоне предоставляет возможность фиксации нарушителя и увеличение надежности обнаружения при реальных размерах нарушителя и наличии быстрых замираний сигнала, что достигается за счет выполнения N измерений входного сигнала приемника для фиксированных интервалов времени, вычисления оценок математического ожидания и дисперсии временного ряда при отсутствии нарушителя и при наличии нарушителя, и сравнения этих двух статистических характеристик сигнала приемника, определяемых свойствами объекта, со значениями этих характеристик при отсутствии нарушителя.
Текст
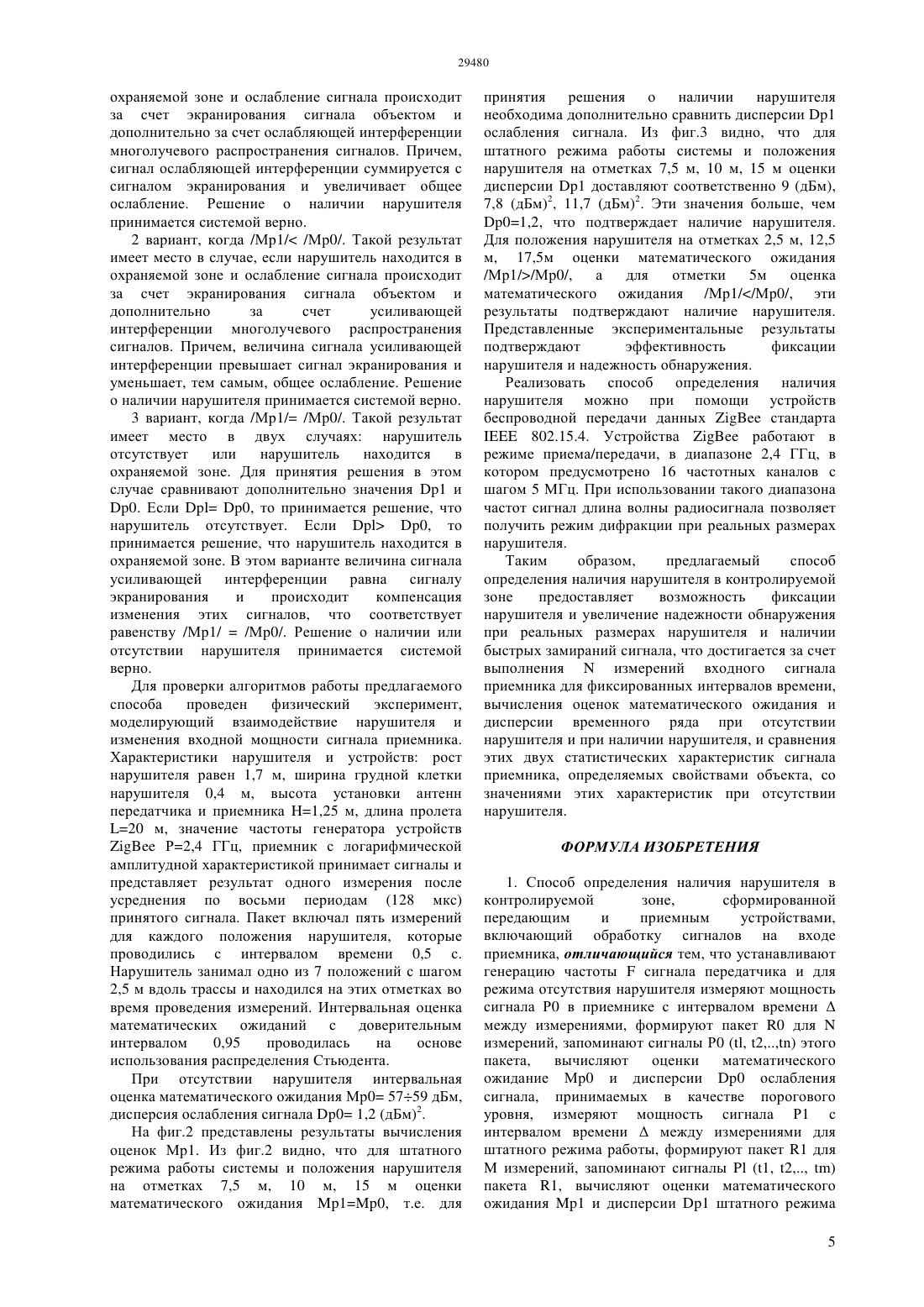
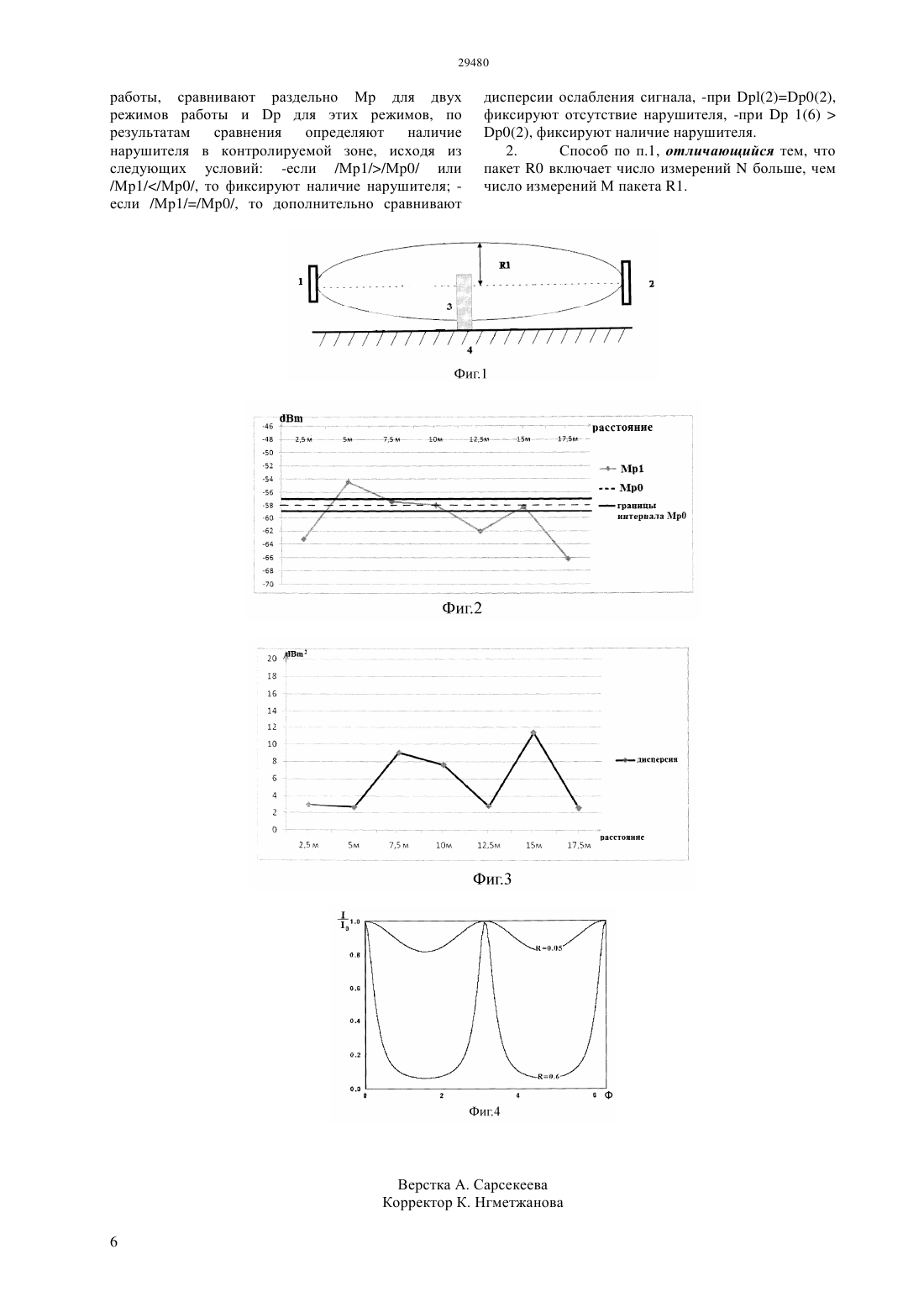
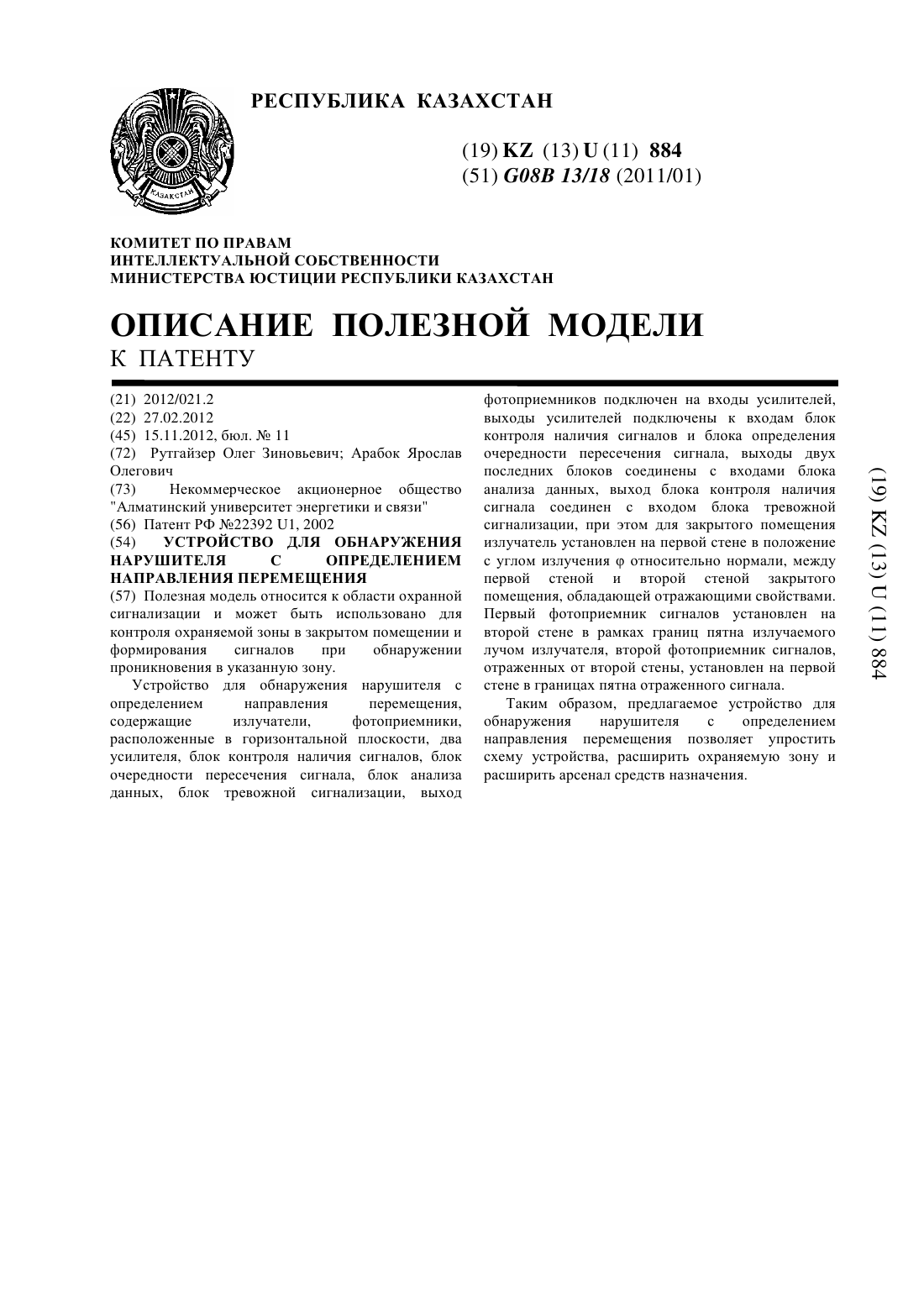
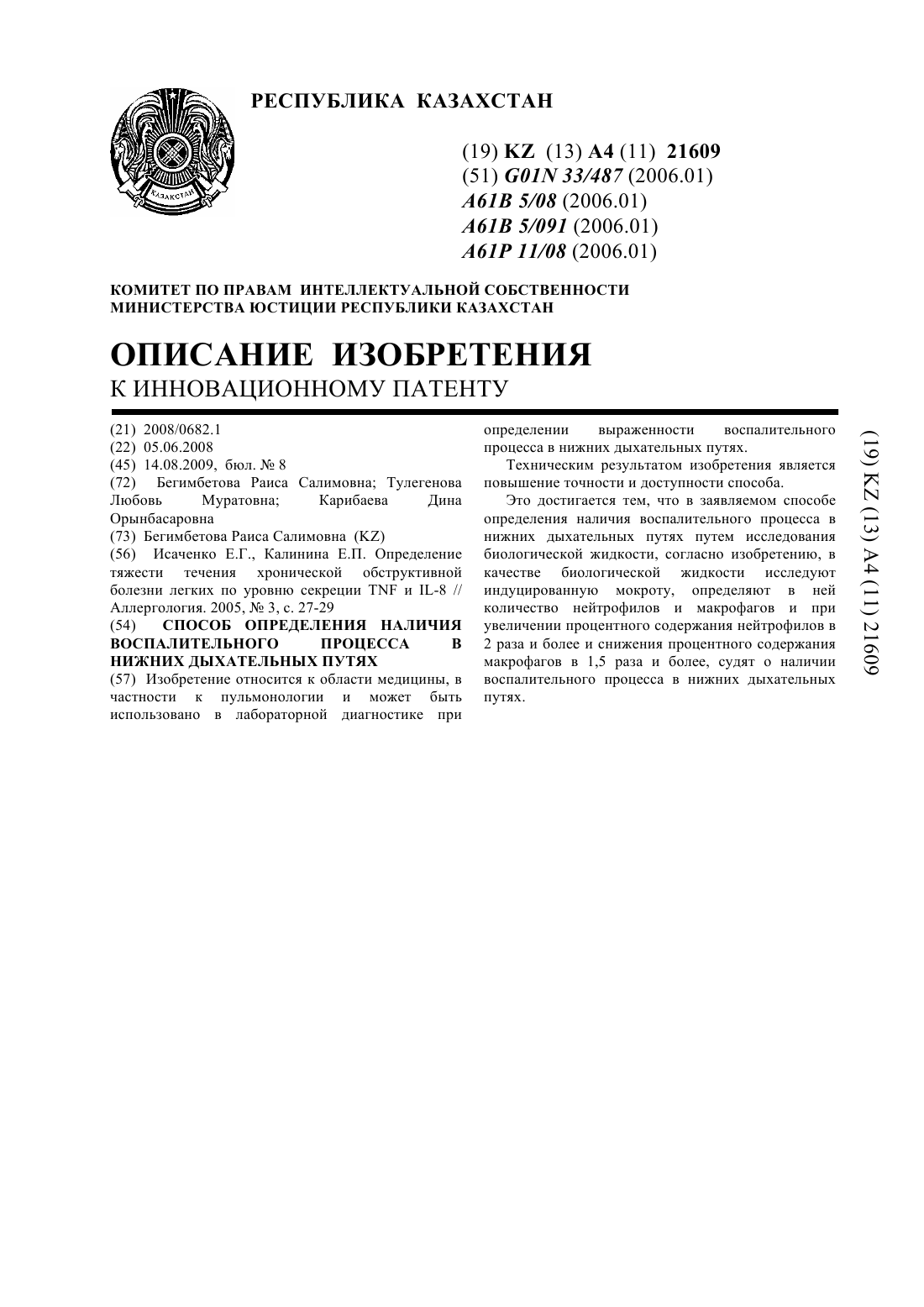
(51) 08 15/00 (2006.01) 08 13/00 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ замираний сигнала, что повышает достоверность определения наличия нарушителя. В предлагаемом способе оценку наличия нарушителя в охраняемой зоне выполняют с использованием двух статистических характеристик мощности сигнала на входе приемника, получаемых на основе фиксированного числа измерений входного сигнала приемника и фиксированного интервала времени между измерениями. Таким образом,предлагаемый способ определения наличия нарушителя в контролируемой зоне предоставляет возможность фиксации нарушителя и увеличение надежности обнаружения при реальных размерах нарушителя и наличии быстрых замираний сигнала, что достигается за счет выполненияизмерений входного сигнала приемника для фиксированных интервалов времени,вычисления оценок математического ожидания и дисперсии временного ряда при отсутствии нарушителя и при наличии нарушителя, и сравнения этих двух статистических характеристик сигнала приемника, определяемых свойствами объекта, со значениями этих характеристик при отсутствии нарушителя.(72) Рутгайзер Олег Зиновьевич Аршидинова Наргиз Туглукжановна(73) Некоммерческое акционерное общество Алматинский университет энергетики и связи(54) СПОСОБ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ НАРУШИТЕЛЯ(57) Изобретение относится к радиолокации, в частности к системам охранной сигнализации, к способам контроля наличия нарушителя в контролируемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра охраняемой зоны. Задачей изобретения является разработка способа определения наличия нарушителя,позволяющего контролировать факт пересечения контролируемой зоны с высокой достоверностью обнаружения нарушителя. Техническим результатом изобретения является возможность фиксации нарушителя и увеличение надежности определения наличия нарушителя при его реальных размерах и наличии быстрых Изобретение относится к радиолокации, в частности к системам охранной сигнализации, к способам контроля наличия нарушителя в контролируемой зоне. Изобретение может быть использовано в системах охранной сигнализации на участках контроля периметра охраняемой зоны. Для контроля периметра широко используются двухпозиционные радиолучевые системы. Данные системы состоят из передатчика и приемника СВЧсигналов, которые размещают в пролете на расстоянии от десятков до нескольких сотен метров друг от друга. Между передатчиком и приемником формируется чувствительная зона с поперечным сечением до нескольких метров. Системы охраны периметра зоны определяют факт пересечение нарушителем чувствительной зоны. Известен способ радиотехнического обнаружения нарушителя в контролируемой зоне Магауенов Р.Г. Системы охранной сигнализации основы теории и принципы построения. Учебное пособие. - М. Горячая линия - Телеком, 2004. - Гл.3,с.134-138. Способ заключаются в том, что контролируемую зону облучают импульсным радиосигналом,при приеме импульсного радиосигнала выделяют изменения его амплитуды,и при превышении этими изменениями порогового значения формируют сигнал тревоги. Недостатком способа является низкая достоверность определения наличия нарушителя при наличии изменения отражающих поверхностей и реальных размерах поверхности нарушителя. Известно большое число видов систем охранной сигнализации (извещатели РЛД-94, Радий 2, Радон,Призма 1/300 Т, Барьер-300 и др.), которые используют принципы способа, представленного выше, но в частотной области. Для охранных систем этого типа используют следующий способ фиксации нарушителя передатчик генерирует гармонический сигнал СВЧ, в приемнике определяют текущий уровень амплитуды сигнала приемными антенными устройствами с использованием электронного блока и отслеживают изменения этого уровня при появлении нарушителя. Сравнивают уровень сигнала с установленными порогами, при отклонении уровня сигнала от порогового значения датчик фиксирует с определенной степенью вероятности появление нарушителя в охраняемой зоне. Система фиксирует нарушителя с большой степенью вероятности при больших его размерах или при наличии группы нарушителей. Недостатком способа, при наличии изменения свойств отражающих поверхностей и реальных размерах поверхности нарушителя, также как и для предыдущего способа,является низкая достоверность определения наличия нарушителя,которая связана, с тем, что результирующий сигнал приемника включает только низкочастотные изменения уровня выходного сигнала (замирания). Известен способ радиотехнического обнаружения нарушителя (. .,Интеллектуальные датчики для охраны периметров,Введенский Б.С., журнал Системы безопасности 3, 2011). Способ предусматривает оценку двух 2 основных параметров настройки чувствительности и времени интегрирования. Настройка времени интегрирования позволяет устранить влияния высокочастотных возмущений и помех. Недостатком способа является необходимость при изменении условий движения нарушителя устанавливать более низкий порог срабатывания или более высокую чувствительность датчика к изменению амплитуды сигнала и увеличивать время интегрирования, т.е. перестраивать пороговые значения, что определяет низкую достоверность определения наличия нарушителя. Наиболее близким к предлагаемому изобретению является способ обнаружения нарушителей (Патент России 2348980 С 2, опубл. 10.03.2009 г) в контролируемой зоне, сформированной вдоль отражающих поверхностей одинаково поляризованными передающим и приемным антенными устройствами, установленными на фиксированном расстоянии от поверхности почвы,включающий обработку сигналов, формируемых объектами, перемещающимися в контролируемой зоне, при этом поляризованные передающие и приемные антенные устройства радиоволнового датчика располагаются в пространстве таким образом, что их векторы поляризации совпадают по направлению и формируются под определенным углом к отражающей поверхности. При этом способ позволяет уменьшить влияния прилегающих поверхностей (почвы, ограды) при изменении их отражающих свойств. Недостатком прототипа является низкая достоверность определения наличия нарушителя в охраняемой зоне, поскольку способ позволяет уменьшить влияние отражающих поверхностей,например, поверхности почвы, но не учитывает появление дополнительных составляющих многолучевого сигнала распространение сигнала за счет дифракции при появлении нарушителя и изменении его характеристик. Задачей изобретения является разработка способа определения наличия нарушителя,позволяющего контролировать факт пересечения контролируемой зоны с высокой достоверностью обнаружения нарушителя. Техническим результатом изобретения является возможность фиксации нарушителя и увеличение надежности определения наличия нарушителя при его реальных размерах и наличии быстрых замираний сигнала, что повышает достоверность определения наличия нарушителя. Для достижения технического результата в предлагаемом способе определения наличия нарушителя в контролируемой зоне,сформированной передающим и приемным устройствами, включающим обработку сигналов,устанавливают генерацию частотысигнала передатчика и для режима отсутствия нарушителя измеряют мощность сигнала Р 0 в приемнике с интервалом временимежду измерениями,формируют пакет 0 дляизмерений, запоминают сигналы Р 0 (1, 2 ) этого пакета, определяют оценки математического ожидания Мр 0 и дисперсии ослабления сигнала в свободном пространстве 0 для пакета 0, выполняют измерения мощности, принимаемой приемником Р 1 в штатном режиме, с интервалом временимежду измерениями, запоминают сигналы Р 1(1, 2,),из сигналов Р 1 формируют пакет 1 для М измерений и вычисляют оценки математического ожидания Мр 1 и дисперсии ослабления сигнала 1, оценивают наличие нарушителя в охраняемой зоне по результатам вычисления Мр и , при этом наличие нарушителя определяют, сравнивая значения оценки математических ожиданий Мр 1 и Мр 0 между собой и дополнительно сравнивая значения дисперсий отклонения ослабления сигнала 1 и 0 между собой- если /Мр 1//Мр 0/ или /Мр 1//Мр 0/, то фиксируют наличие нарушителя- если /Мр 1//Мр 0/, то дополнительно сравнивают дисперсии ослабления сигнала,определяют наличие нарушителя, исходя из следующих условий,- если 10, то фиксируют отсутствие нарушителя,- если 10, то фиксируют наличие нарушителя. Пакет 0 включает число измеренийбольше,чем число измерений М пакета 1, в соответствии с изобретением, в предлагаемом способе оценку наличия нарушителя в охраняемой зоне выполняют с использованием двух статистических характеристик мощности сигнала на входе приемника, получаемых на основе фиксированного числа измерений входного сигнала приемника и фиксированного интервала времени между измерениями. Принцип работы предлагаемого способа поясняется рисунками, представленными на фиг.1,фиг. 2, фиг.3, фиг.4. На фиг.1 представлена схема расположения элементов радиолучевой системы определения наличия нарушителя. На фиг.2 представлены экспериментальные результаты оценки математического ожидания Мр 1 ослабления сигнала мощности на входе приемника для нарушителя, находящегося на различных расстояниях относительно передатчика. На фиг.3 представлена экспериментальная зависимость оценки дисперсии 1 сигнала мощности на входе приемника для нарушителя,находящегося на различных расстояниях относительно передатчика. На фиг.4 представлены характеристики напряженности электромагнитного поля сигнала интерференции при многолучевом сигнале (/////10.). На фиг.1 обозначены 1 2- приемный и передающий пост 3 - нарушитель 1 - радиус первой зоны Френеля для частоты ,4- почва. На фиг.2 обозначены Мр 1 - оценка математического ожидания ослабления радиосигнала при наличии нарушителя для различных расстоянии положения нарушителя,где точки (квадратики) условно соединены прямыми линиями Мр 0 - оценка математического ожидания ослабления сигнала при отсутствии нарушителя(пунктирная линия) границы интервала Мр 0 - значения интервальной оценки математического ожидания ослабления сигнала с вероятностью 95. На фиг.3 обозначены значения дисперсии ослабления сигнала (квадратики) для различных расстоянии положения нарушителя. На фиг.4 обозначены Ф - фазовый сдвиг (радиан), - величина пропорциональная количеству лучей,- относительная мощность сигнала 0 приемника, - мощность сигнала приемника,0 - мощность сигнала передатчика. Способ определения наличия нарушителя можно пояснить следующим образом. Радиолучевая система определения наличия нарушителя состоит из передатчика, излучающего частоту , и приемника, во время работы, которых образуется канал передачи электромагнитной энергии радиолуч. Устройства имеют объемную зону обнаружения - вытянутый эллипсоид вращения,диаметр которого зависит от рабочей частоты излучения передатчикаи расстояния между передатчиком и приемником . Экранирование первой зоны Френеля нарушителем приводит к ослаблению напряженности поля в зависимости от величины перекрытия сигнала. Система работает в двух режимах в режиме определения величины мощности сигнала в приемнике при отсутствии нарушителя и в штатном режиме определения наличия нарушителя. Результирующий сигнал приемника включает несколько составляющих составляющую - уровень сигнала как глобальное среднее значение, которое зависит от расстояния пролетамежду передатчиком и приемником(уменьшается с увеличением расстояния),составляющую - медленные вариации поля вокруг глобального среднего значения за счт затенений(медленные замирания) и составляющую - быстрые вариации во времени (быстрые замирания). Быстрые замирания возникают вследствие того, что длина волны сигнала в радиолучевой системе составляет единицы- десятки сантиметров и наличие множества отраженных сигналов со случайными величинами амплитуды и фазы приводит к значительным изменениям уровня принимаемого сигнала даже при незначительных перемещениях или колебаниях положения нарушителя. Мощность сигнала при интерференции двух сигналов, при разных путях распространения сигналов будет соответствовать следующей А. зависимости(//.//430551/ Голубев, Интерференционные тайны природы // Наука и жизнь 1 - 2008 г. - .26-31). 3 12 инт 122 12122 12 где- результирующая мощность радиосигнала,1, 2 -первая и вторая составляющие мощности интерференции сигналов,инт - интерференционная функция, -разность хода прохождения сигналов, - изменение разности хода сигналов, - длина волны сигнала, - степень когерентности, - разность фаз. В выражении(1) составляющая инт 212(2/,) рассматривается как интерференционная функция, которая характеризует влияние двулучевого распространения сигналов на результирующий сигнал. Две особенности соответствуют уравнению (1) при интерференции двулучевого сигнала и позволяют повысить надежность определения наличия нарушителя. Первая особенность - имеют место ослабляющая или усиливающая интерференция и, соответственно, минимум и максимум выражения (1) а) если разность хода лучей равна целому числу длин волн или взаимодействующие волны имеют равные фазыв рамках одной длины волны, то суммарный сигнал двух лучей максимален, при этом происходит усиление суммарного сигнала(усиливающая интерференция),б) если разность фазсигналов близка к 180, то амплитуда суммарного сигнала может стать минимальной(ослабляющая интерференция). Плавное чередование слабо выраженных максимумов и минимумов мощности сигнала характеризует двулучевое распространение(замирание) сигнала в зависимости от разности хода сигналов. Вторая особенность - существуют области низкой и высокой чувствительности мощности приемника к изменению величин , определяющих быстрые замирания а) область низкой чувствительности, если изменениесоответствует участку максимума или минимума косинусоидальной функции, т. е. (фаза близка к 0, крутизна функции минимальна),б) область высокой чувствительности, если изменение соответствует участку характеристики косинусоидальной функции с высокой крутизной (фаза близка к 90). Изменения величины колебаний быстрых замираний, можно в этом случае, характеризовать значением дисперсии , которую можно использовать в качестве дополнительного параметрам случайного процесса для фиксации наличия нарушителя. При наличии нарушителя с размерами контура тела, превышающими длину волны, имеет место дифракция сигнала, которая существенно изменяет результирующий уровень мощности и глубину быстрых замираний сигнала приемника за счет многолучевого распространения. Для многолучевого распространения сигнала 4 интерференционная картина формируется в виде суммы влияния всех составляющих и существенно отличается от зависимости (1). Напряженность поля включает узкие участки с большой интенсивностью результирующего сигнала, которые разделены широким участком с низкой напряженностью поля(Фиг.4). При этом также как для случая отсутствия нарушителя эти участки являются областями с большой или малой чувствительностью к изменению характеристик . Значение дисперсии, которое для процесса с многолучевым распространением значительно увеличивается по сравнению с двулучевым распространением, можно использовать для оценки наличия нарушителя. Наличие нарушителя в контролируемой зоне приводит к изменению электромагнитного поля за счет затенения приемника и дифракции сигнала на контуре нарушителя и при этом возможна взаимная компенсация влияния изменения этих составляющих. Компенсация составляющих напряженности поля приводит к неопределенности при принятии решения о наличии нарушителя. Пример работы системы. Режим 1 - система находится в режиме запуска при отсутствии нарушителя. 1. Генерируют сигнал частоты , при отсутствии нарушителя измеряют и запоминают сигнал Р 0 на входе в приемник. Устанавливают интервал времени между измерениями , величину которого определяют в зависимости от предполагаемой скорости движения нарушителя и желаемой точности оценки характеристик. 2. Формируют пакет 0 дляизмерений,запоминают сигналы 0(1, 2,.,) этого пакета,определяют оценки математического ожидания Мр 0 и дисперсии 0 ослабления сигнала для режима отсутствия нарушителя, принимаемых в качестве пороговых значений. Режим 2 - система находится в штатном режиме работы. 1. Генерируют сигнал частоты , нарушитель пересекает границу зоны и перемещается на расстоянии 1 от передатчика, измеряют и запоминают сигнал Р 1 на входе в приемник. Устанавливают интервал времени между измерениями , величина которого зависит от предполагаемой скорости движения нарушителя и желаемой точности оценки характеристик. 2 Формируют пакет 1 для М измерений, число которых зависит от предполагаемой скорости движения нарушителя и желаемой точности оценки характеристик, запоминают сигналы 1(1,2,., ) этого пакета, определяют оценки математического ожидание Мр 1 и дисперсии 1 ослабления сигнала. 3 Определяют наличие нарушителя, для этого первоначально сравнивают значения Мр 0, Мр 1 и затем сравнивают значения 0, 1, при этом 1 вариант, когда /Мр 1/ /Мр 0/. Такой результат имеет место в случае, если нарушитель находится в охраняемой зоне и ослабление сигнала происходит за счет экранирования сигнала объектом и дополнительно за счет ослабляющей интерференции многолучевого распространения сигналов. Причем,сигнал ослабляющей интерференции суммируется с сигналом экранирования и увеличивает общее ослабление. Решение о наличии нарушителя принимается системой верно. 2 вариант, когда /Мр 1/ /Мр 0/. Такой результат имеет место в случае, если нарушитель находится в охраняемой зоне и ослабление сигнала происходит за счет экранирования сигнала объектом и дополнительно за счет усиливающей интерференции многолучевого распространения сигналов. Причем, величина сигнала усиливающей интерференции превышает сигнал экранирования и уменьшает, тем самым, общее ослабление. Решение о наличии нарушителя принимается системой верно. 3 вариант, когда /Мр 1/ /Мр 0/. Такой результат имеет место в двух случаях нарушитель отсутствует или нарушитель находится в охраняемой зоне. Для принятия решения в этом случае сравнивают дополнительно значения 1 и 0. Если 0, то принимается решение, что нарушитель отсутствует. Если 0, то принимается решение, что нарушитель находится в охраняемой зоне. В этом варианте величина сигнала усиливающей интерференции равна сигналу экранирования и происходит компенсация изменения этих сигналов, что соответствует равенству /Мр 1//Мр 0/. Решение о наличии или отсутствии нарушителя принимается системой верно. Для проверки алгоритмов работы предлагаемого способа проведен физический эксперимент,моделирующий взаимодействие нарушителя и изменения входной мощности сигнала приемника. Характеристики нарушителя и устройств рост нарушителя равен 1,7 м, ширина грудной клетки нарушителя 0,4 м, высота установки антенн передатчика и приемника 1,25 м, длина пролета 20 м, значение частоты генератора устройствР 2,4 ГГц, приемник с логарифмической амплитудной характеристикой принимает сигналы и представляет результат одного измерения после усреднения по восьми периодам (128 мкс) принятого сигнала. Пакет включал пять измерений для каждого положения нарушителя, которые проводились с интервалом времени 0,5 с. Нарушитель занимал одно из 7 положений с шагом 2,5 м вдоль трассы и находился на этих отметках во время проведения измерений. Интервальная оценка математических ожиданий с доверительным интервалом 0,95 проводилась на основе использования распределения Стьюдента. При отсутствии нарушителя интервальная оценка математического ожидания Мр 0 5759дБм,дисперсия ослабления сигнала 0 1,2 (дБм)2. На фиг.2 представлены результаты вычисления оценок Мр 1. Из фиг.2 видно, что для штатного режима работы системы и положения нарушителя на отметках 7,5 м, 10 м, 15 м оценки математического ожидания 10, т.е. для принятия решения о наличии нарушителя необходима дополнительно сравнить дисперсии 1 ослабления сигнала. Из фиг.3 видно, что для штатного режима работы системы и положения нарушителя на отметках 7,5 м, 10 м, 15 м оценки дисперсии 1 доставляют соответственно 9 (дБм),7,8 (дБм)2, 11,7 (дБм)2. Эти значения больше, чем 01,2, что подтверждает наличие нарушителя. Для положения нарушителя на отметках 2,5 м, 12,5 м, 17,5 м оценки математического ожидания/Мр 1//Мр 0/,а для отметки 5 м оценка математического ожидания /Мр 1//Мр 0/, эти результаты подтверждают наличие нарушителя. Представленные экспериментальные результаты подтверждают эффективность фиксации нарушителя и надежность обнаружения. Реализовать способ определения наличия нарушителя можно при помощи устройств беспроводной передачи данныхстандарта 802.15.4. Устройстваработают в режиме приема/передачи, в диапазоне 2,4 ГГц, в котором предусмотрено 16 частотных каналов с шагом 5 МГц. При использовании такого диапазона частот сигнал длина волны радиосигнала позволяет получить режим дифракции при реальных размерах нарушителя. Таким образом,предлагаемый способ определения наличия нарушителя в контролируемой зоне предоставляет возможность фиксации нарушителя и увеличение надежности обнаружения при реальных размерах нарушителя и наличии быстрых замираний сигнала, что достигается за счет выполненияизмерений входного сигнала приемника для фиксированных интервалов времени,вычисления оценок математического ожидания и дисперсии временного ряда при отсутствии нарушителя и при наличии нарушителя, и сравнения этих двух статистических характеристик сигнала приемника, определяемых свойствами объекта, со значениями этих характеристик при отсутствии нарушителя. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения наличия нарушителя в контролируемой зоне,сформированной передающим и приемным устройствами,включающий обработку сигналов на входе приемника, отличающийся тем, что устанавливают генерацию частотысигнала передатчика и для режима отсутствия нарушителя измеряют мощность сигнала Р 0 в приемнике с интервалом временимежду измерениями, формируют пакет 0 дляизмерений, запоминают сигналы Р 0 (, 2) этого пакета,вычисляют оценки математического ожидание Мр 0 и дисперсии 0 ослабления сигнала, принимаемых в качестве порогового уровня, измеряют мощность сигнала Р 1 с интервалом временимежду измерениями для штатного режима работы, формируют пакет 1 для М измерений, запоминают сигналы(1, 2 ) пакета 1, вычисляют оценки математического ожидания 1 и дисперсии 1 штатного режима 5 работы, сравнивают раздельно Мр для двух режимов работы идля этих режимов, по результатам сравнения определяют наличие нарушителя в контролируемой зоне, исходя из следующих условий -если /Мр 1//Мр 0/ или/Мр 1//Мр 0/, то фиксируют наличие нарушителя если /Мр 1//Мр 0/, то дополнительно сравнивают дисперсии ослабления сигнала, -при (2)0(2),фиксируют отсутствие нарушителя, -при 1(6)0(2), фиксируют наличие нарушителя. 2. Способ по п.1, отличающийся тем, что пакет 0 включает число измеренийбольше, чем число измерений М пакета 1.
МПК / Метки
МПК: G08B 13/00, G08B 15/00
Метки: нарушителя, наличия, определеия, способ
Код ссылки
<a href="https://kz.patents.su/6-ip29480-sposob-opredeleiya-nalichiya-narushitelya.html" rel="bookmark" title="База патентов Казахстана">Способ определеия наличия нарушителя</a>
Устройство для обнаружения нарушителя с определением направления перемещения
Номер полезной модели: 884
Опубликовано: 15.11.2012
Авторы: Арабок Ярослав Олегович, Рутгайзер Олег Зиновьевич
МПК: G08B 13/00, G08B 13/18
Метки: нарушителя, обнаружения, устройство, направления, определением, перемещения
Формула / Реферат:
MnKG08B 13/00 РЕФЕРАТ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОПРЕДЕЛЕНИЕМ НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ ТЭР'ПП БУЗУШЫНЫЦ ОРЫН АУЫСТЫРУ БАГЫТЫН АНЫКТАУГА А РН АЛТАЯ К^РЫЛЕЫ Изобретение относится к области охранной сигнализации и может быть использовано для контроля охраняемой зоны в закрытом помещении и формирования сигналов при обнаружении проникновения в указанную зону. Устройство для обнаружения нарушителя с определением направления перемещения,...
Способ определения наличия помпажа газоперекачивающего агрегата
Номер предварительного патента: 21059
Опубликовано: 15.04.2009
Авторы: Адилов Талгат Адилович, Климов Павел Викторович, Афанасенко Евгений Иванович, Вахненко Владимир Петрович, Сидоровнин Анатолий Филиппович, Бекебаев Ауес Туркенбаевич, Байшуаков Аскар Абжамиевич
МПК: F04D 27/00
Метки: определения, газоперекачивающего, помпажа, наличия, способ, агрегата
Формула / Реферат:
Изобретение относится к области компрессоростроения и может быть использовано в системах антипомпажной защиты газопере-качивающих агрегатов.Техническим результатом изобретения является повышение достоверности распознавания помпажа на ранней стадии его зарождения, повышение надежности работы агрегата и расширение арсенала средств назначения.Это достигается тем, что в предлагаемом способе определения наличия помпажа газопере-качивающего агрегата,...
Устройство для определения наличия помпажа газоперекачивающего агрегата
Номер предварительного патента: 20249
Опубликовано: 17.11.2008
Авторы: Бекебаев Ауес Туркенбаевич, Климов Павел Викторович, Адилов Талгат Адилович, Вахненко Владимир Петрович, Сидоровнин Анатолий Филиппович, Байшуаков Аскар Абжамиевич, Афанасенко Евгений Иванович
МПК: F04D 27/00
Метки: наличия, агрегата, газоперекачивающего, определения, помпажа, устройство
Формула / Реферат:
Изобретение относится к области защиты газоперекачивающих агрегатов от помпажа и может быть использовано в системах защиты и управления газопекачивающих агрегатов: компрессоров или турбин. Техническим результатом изобретения является упрощение конструкции, повышение точности определения помпажа на ранней стадии его зарождения и расширение функциональных возможностей устройства. Это достигается тем, что в предлагаемом устройстве для...
Способ определения наличия воспалительного процесса в нижних дыхательных путях
Номер инновационного патента: 21609
Опубликовано: 14.08.2009
Авторы: Тулегенова Любовь Муратовна, Бегимбетова Раиса Салимовна, Карибаева Дина Орынбасаровна
МПК: A61B 5/08, A61B 5/091, A61P 11/08...
Метки: способ, воспалительного, нижних, процесса, определения, дыхательных, наличия, путях
Формула / Реферат:
Изобретение относится к области медицины, в частности к пульмонологии и может быть использовано в лабораторной диагностике при определении выраженности воспалительного процесса в нижних дыхательных путях.Техническим результатом изобретения является повышение точности и доступности способа.Это достигается тем, что в заявляемом способе определения наличия воспалительного процесса в нижних дыхательных путях путем исследования биологической...
Способ определения наличия трансформированных клеток и их локализации в организме
Номер патента: 21099
Опубликовано: 15.06.2011
Авторы: Францев Александр Павлович, Францева Ирина Александровна
МПК: A64K 39/395
Метки: трансформированных, организме, локализации, определения, клеток, способ, наличия
Формула / Реферат:
Изобретение относится к иммуногисто-химическим способам определения наличия и локализации трансформированных клеток.Возможность использования in vivo методов иммуногистохимии для раннего обнаружения трансформированных клеток и выявления места их локализации в организме человека или животных достигается тем, что в способе определения наличия трансформированных клеток и их локализации в организме, включающем введение детектируемых физическими...
Предыдущий патент: Способ изготовления строительных блоков без цемента
Следующий патент: Импульсивный ускоритель в режиме со сплошным наполнением рабочим газом
Случайный патент: Способ опреснения и очистки от бора высокоминерализованной воды до нормативов питьевого качества