Самоходный паром
Номер полезной модели: 1404
Опубликовано: 15.03.2016
Авторы: Гнеломедов Александр Николаевич, Адылин Александр Григорьевич
Формула / Реферат
Самоходный паром относится к области водного транспорта, в частности к средствам транспортировки пассажиров и грузов.
Самоходный паром содержит понтон, выполненный в виде двух корпусов 1, 2, жестко связанных между собой грузовой платформой 3. Корпуса понтона выполнены безнаборными в виде цилиндрических труб, внутренние полости которых разделены переборками 4 на герметичные отсеки. Платформа 3 снабжена рубкой 6 с постом управления, в состав которого входят рулевое колесо с редуктором, пульт управления. В кормовой части платформы 3 между корпусами 1 и 2 установлены два автономных переносных движителя 15, в качестве которых использованы подвесные лодочные моторы. Корпуса лодочных моторов соединены между собой жесткой тягой. Рулевой механизм включает жесткий штуртрос 18, присоединенный одним концом к корпусу одного из лодочных моторов, а другим, к редуктору рулевого колеса с возможностью возвратнопоступательного перемещения. Поворотом рулевого колеса через перемещение штуртроса 18 передают тянущие или толкающие усилия на корпус одного из лодочных моторов, поворачивая его в нужную сторону. Синхронный поворот другого лодочного мотора осуществляется через жесткую тягу.
Текст
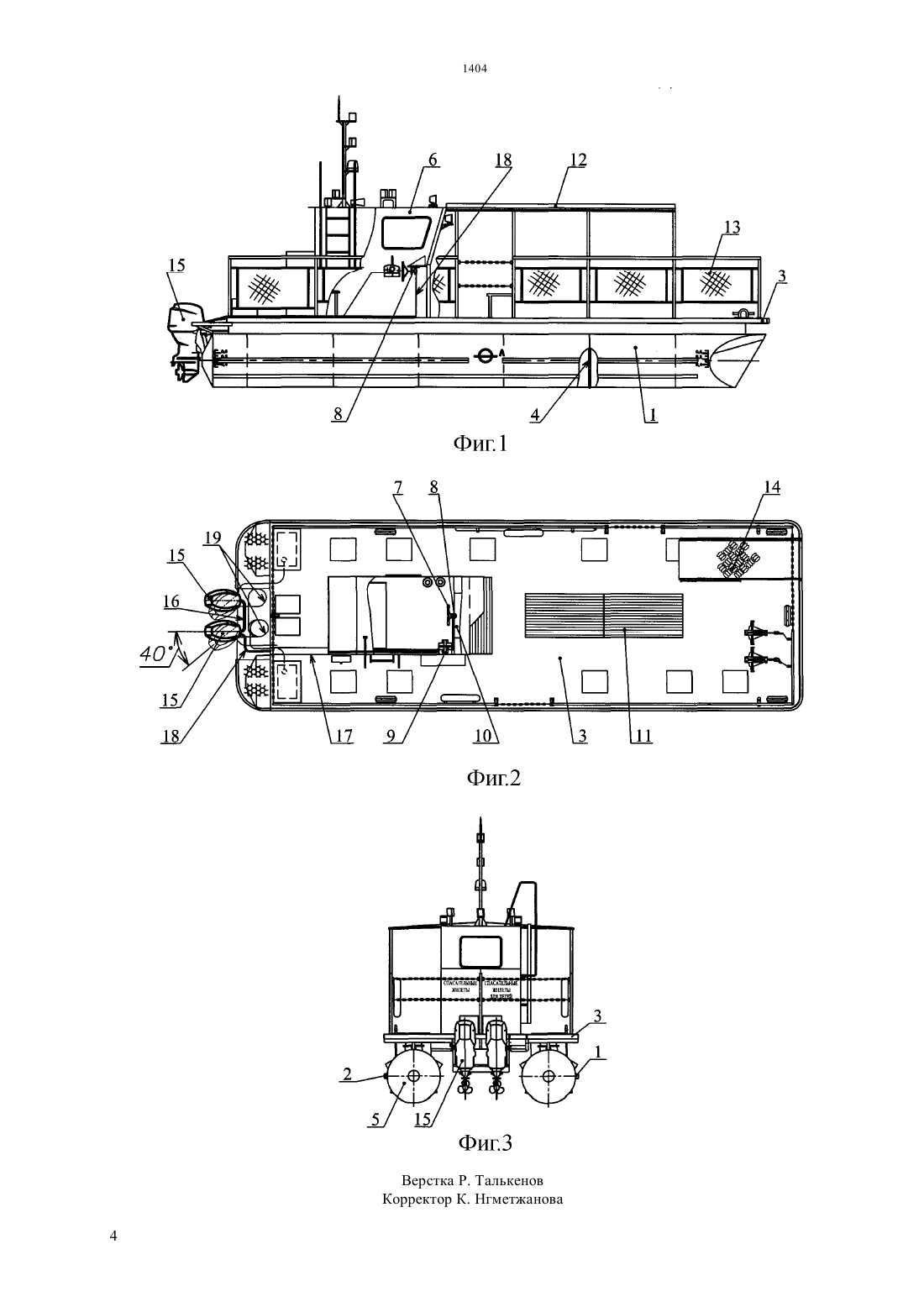
МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ Платформа 3 снабжена рубкой 6 с постом управления, в состав которого входят рулевое колесо с редуктором, пульт управления. В кормовой части платформы 3 между корпусами 1 и 2 установлены два автономных переносных движителя 15, в качестве которых использованы подвесные лодочные моторы. Корпуса лодочных моторов соединены между собой жесткой тягой. Рулевой механизм включает жесткий штуртрос 18,присоединенный одним концом к корпусу одного из лодочных моторов, а другим, к редуктору рулевого колеса с возможностью возвратно-поступательного перемещения. Поворотом рулевого колеса через перемещение штуртроса 18 передают тянущие или толкающие усилия на корпус одного из лодочных моторов, поворачивая его в нужную сторону. Синхронный поворот другого лодочного мотора осуществляется через жесткую тягу.(72) Адылин Александр Григорьевич Гнеломедов Александр Николаевич(73) Акционерное общество Научноисследовательский институт Гидроприбор(57) Самоходный паром относится к области водного транспорта, в частности к средствам транспортировки пассажиров и грузов. Самоходный паром содержит понтон,выполненный в виде двух корпусов 1, 2, жестко связанных между собой грузовой платформой 3. Корпуса понтона выполнены безнаборными в виде цилиндрических труб, внутренние полости которых разделены переборками 4 на герметичные отсеки. Заявляемое устройство относится к области водного транспорта, преимущественно к средствам транспортировки пассажиров и грузов между берегами равнинных рек и озер, в частности к самоходным паромам. Из сведений о существующем уровне техники известен паром, содержащий понтон с грузовой платформой и надстройками для экипажа и пассажиров и трособлочное устройство для его перемещения по канату, натянутому поперек водоема и закрепленному концами на его берегах(см. Патент 2051511 В 63 В 35/54 от 20.03.1994 г). Недостатком этого парома является ограниченная возможность использования, в частности на судоходных реках, где курсируют помимо мелких судов (катера и моторные лодки) суда с возвышающейся над водой палубой. При этом на многих реках удобные места для причаливания не всегда располагаются на противоположных берегах по прямой линии. Таким образом, в этих условиях использования парома,перемещающегося по натянутому канату становится невозможным. Наиболее близким по технической сущности к предлагаемому (прототипом), является паром для сообщения между берегами рек в соответствии с описанием к патенту 2294860, В 63 В 35/54,В 63 Н 20/08 от 2007 г. Этот паром содержит понтон,выполненный в виде двух параллельно расположенных корпусов, жестко связанных между собой грузовой платформой,движительную установку, включающую пару смонтированных по бортам платформы автономных переносных узлов,каждый из которых выполнен в виде трубопровода и двигателя с гребным винтом, размещенным внутри трубопровода, и сочлененного с трубопроводом рулевого патрубка,смонтированного с возможностью поворота в горизонтальной плоскости. Синхронный поворот обоих патрубков обеспечивается рычажным шарнирно-стрежневым узлом с приводным механизмом. Таким образом,паром может курсировать как поперек, так и вдоль реки при высокой маневренности по курсу, огибая отмели и другие препятствия. К недостаткам данного парома следует отнести сложность конструкции, так как для достижения требуемой плавучести корпус понтона выполнен из набора нескольких секций, изготовленных из различных материалов. Кроме того, размещение гребных винтов движительной установки в трубопроводах по бортам платформы и сочлененных с рулевыми патрубками, синхронный поворот которых осуществляется громоздким шарнирно-стержневым узлом с гидравлическим приводным механизмом, дополнительно усложняет конструкцию парома. Тем самым повышается материалоемкость,ухудшаются такие эксплуатационные характеристики как надежность,безопасность и удобство обслуживания. Задачей,решаемой заявляемой полезной моделью является создание самоходного парома с улучшенными эксплуатационными характеристиками. Это достигается тем, что предлагается самоходный паром,содержащий понтон,выполненный в виде двух параллельно расположенных корпусов, жестко связанных между собой в верхней части грузовой платформой, пару разнесенных относительно диаметральной плоскости понтона автономных переносных движителей, каждый из которых включает двигатель, кинематически соединенный с гребным винтом, и рулевой механизм управления паромом. В отличие от прототипа, корпуса понтона выполнены безнаборными в виде цилиндрических труб,внутренние полости которых разделены переборками на герметичные отсеки,что обеспечивает непотопляемость и равнопрочность корпусов по всем направлениям при минимальном весе, а также значительно упрощает конструкцию,исключая шпангоуты, стрингеры, бимсы, ребра жесткости и т.п. При этом наличие двух автономных переносных движителей, установленных на корме платформы и связанных между собой жесткой тягой для синхронного поворота в горизонтальной и вертикальной плоскостях, обеспечивает не только достижение необходимой мощности для перемещения парома и управления направлением его движения, но и возможность их быстрого снятия-установки при ремонте, обслуживании или замене. Разнесение движителей относительно диаметральной плоскости парома и возможность раздельного управления числом оборотов и реверсом движителей позволяет производить подруливание или разворот парома на месте. Кроме того, исполнение рулевого механизма управления паромом в виде проложенного в цилиндрической направляющей штуртроса, закрепленного одним концом на корпусе одного из движителей, а другим концом связанного с редуктором рулевого колеса поста управления с возможностью возвратнопоступательного перемещения,существенно упрощает конструкцию рулевого механизма,обеспечивает не только поворот автономных переносных движителей при маневрировании, но и повышает надежность управления паромом. Дополнительно грузовая платформа снабжена рубкой, в которой размещается пост управления поворотом и режимом работы движителей, что обеспечивает удобство в эксплуатации. Сущность заявляемой полезной модели поясняется чертежами, где на фиг.1 представлен самоходный паром, вид сбоку на фиг.2 - то же, вид сверху на фиг.3 - то же, вид на корму. Предлагаемый самоходный паром содержит понтон, представляющий собой два параллельно расположенных друг относительно друга цилиндрических корпуса 1, 2, жестко соединенных между собой в верхней части платформой 3 с помощью сварки. Корпуса 1, 2 и платформа 3 изготовлены из листового металла. Форма корпусов - 1 и 2 - цилиндрическая труба необходимого диаметра,обеспечивающая расчетную плавучесть и прочность парома. Внутренние полости труб разделены металлическими переборками 4 на герметичные отсеки. У каждого корпуса 1 и 2 носовой отсек выполнен с наклоном для уменьшения сопротивления при движении парома, а кормовые отсеки заглушены крышками 5. Грузовая платформа 3 снабжена рубкой 6 для экипажа и размещения поста управления паромом, в состав которого входят рулевое колесо 7 с редуктором 8, пульт управления 9, блок управления и контроля 10. На платформе 3 размещены скамейки 11 для пассажиров. В целях защиты пассажиров от солнца и осадков и их безопасности на платформе установлен тент 12, а по ее периметру - леерное ограждение 13. Для удобства посадки и высадки пассажиров имеется трап-сходня 14. В кормовой части платформы между корпусами 1 и 2 понтона размещены два автономных переносных движителя 15, в качестве которых использованы широко применяемые подвесные лодочные моторы, в сумме создающие необходимую мощность и упор гребных винтов для перемещения парома с расчетной скоростью. Крепления моторов на транце платформы 3 осуществляется с помощью штатных шарнирно-поворотных узлов (на чертеже не показано), поставляемых в комплекте с моторами,обеспечивающих возможность поворота моторов в горизонтальной плоскости в обе стороны на угол до 40 и подъема их в вертикальной плоскости при одолении мелководных или заросших участков водоема. Для обеспечения синхронного поворота корпуса лодочных моторов соединены между собой жесткой тягой 16 посредством разъемных соединений (например, болтами). Рулевой механизм управления паромом включает проложенный по палубе платформы 3 внутри цилиндрической направляющей 17 штуртрос 18 достаточной жесткости, прикрепленный болтовым соединением к корпусу одного из лодочных моторов. Другой конец штуртроса 18 заведен в рубку 6 на пост управления и связан с редуктором 8 рулевого колеса 7 с возможностью возвратно - поступательного перемещения, например, с помощью широко известной реечно-шестеренчатой передачи (на чертеже не показано). На пост рубки 6, выведены также тросы 19 управления дроссельными заслонками движителей 15 (лодочных моторов). Работа по доставке пассажиров и грузов между причалами водоема осуществляется следующим образом. После посадки пассажиров, погрузки груза и подъема на борт трап-сходней 14 паром готов к отплытию. Дистанционно с поста управления осуществляется запуск двигателей лодочных моторов. Рукоятками управления через тросы 19 устанавливается необходимое для движения парома число оборотов гребных винтов. Управление паромом при его движении осуществляется поворотом рулевого колеса 7, перемещающего штуртрос 18 вперед или назад по ходу движения через редуктор 8 реечно-шестереночную передачу внутри направляющей 17, тем самым воздействуя на корпус одного из движителей 15, который изменяет свое угловое положение в нужную сторону. Синхронный поворот второго движителя 15 осуществляется через жесткую тягу 16. При этом самоходный паром изменяет направление движения. Корректировка курса или подруливание при причаливании может производиться без поворота движителей 15 путем изменения числа оборотов или реверса гребного винта одного из движителей. В случае необходимости технического обслуживания,ремонта или по окончании навигации движители 15 могут быть легко отсоединены друг от друга и от штуртроса 18 рулевого механизма и сняты с транца платформы 3. Проведенные ходовые испытания опытного образца предлагаемого самоходного парома подтверждают его высокие эксплуатационные характеристики, а именно простоту и надежность конструкции и управления паромом, удобство в обслуживании и ремонте. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ Самоходный паром, содержащий понтон,выполненный в виде двух параллельно расположенных корпусов, жестко связанных между собой в верхней части грузовой платформой, пару разнесенных относительно диаметральной плоскости понтона автономных переносных движителей, каждый из которых включает двигатель, кинематически соединенный с гребным винтом, и рулевой механизм управления паромом,отличающийся тем, что корпуса понтона выполнены безнаборными в виде цилиндрических труб, внутренние полости которых разделены переборками на герметичные отсеки, грузовая платформа снабжена рубкой с постом управления,автономные переносные движители размещены на корме платформы в промежутке между корпусами и связаны между собой посредством жесткой тяги,при этом рулевой механизм управления паромом выполнен в виде проложенного внутри цилиндрической направляющей штуртроса, один конец которого закреплен на корпусе одного из автономных движителей, а другой - заведен в рубку и связан с редуктором рулевого колеса поста управления с возможностью возвратнопоступательного перемещения.
МПК / Метки
МПК: B63B 35/54
Метки: самоходный, паром
Код ссылки
<a href="https://kz.patents.su/4-u1404-samohodnyjj-parom.html" rel="bookmark" title="База патентов Казахстана">Самоходный паром</a>
Самоходный миномет “САТ”
Номер полезной модели: 81
Опубликовано: 17.12.2002
Авторы: Алпысбаев Самет Токашевич, Сихимов Манас Камардинович
МПК: F41H 7/02, F41F 1/06, B62D 49/06...
Метки: миномет, самоходный, сат
Формула / Реферат:
Полезная модель относится к военной технике. Технический результат полезной модели - достижение высокой проходимости, скорострельности и упрощения конструкции. Это достигается тем, что самоходный миномет содержит легкобронированный тягач МТ-ЛБ, бронированную башню с орудийным проемом, жестко закрепленную на десантном отделении корпуса тягача МТ-ЛБ, боевую часть автоматического миномета 2Б9, включающую автомат и станок с механизмами, и...
Устройство для подогрева и увлажнения агломерационной шихты паром
Номер патента: 23617
Опубликовано: 15.12.2010
Авторы: Шаньгин Геннадий Яковлевич, Вилков Александр Евгеньевич, Жаппаров Абдигамит Абдисейтович, Татаркин Николай Леонидович, Помазаненко Юрий Георгиевич
МПК: C22B 1/24
Метки: шихты, увлажнения, устройство, паром, подогрева, агломерационной
Формула / Реферат:
Изобретение относится к подготовке сырья для металлургического передела, в частности к агломерационному производству.Техническим результатом изобретения является повышение эффективности использования тепловой энергии и влаги пара при подогреве и увлажнении агломерационной шихты.Технический результат достигается тем, что устройство для подогрева и увлажнения агломерационной шихты паром, содержит узел подачи пара в виде коллектора с системой...
Способ очистки дымовых выбросов ТЭЦ перегретым паром
Номер предварительного патента: 18760
Опубликовано: 17.09.2007
Авторы: Григоренко Владимир Иванович, конырбаев рустем толеутаевич
МПК: A61L 9/00
Метки: перегретым, очистки, выбросов, паром, дымовых, способ, тэц
Формула / Реферат:
Предложена принципиально новая схема очистки дымовых выбросов ТЭЦ и других промышленных предприятии перегретым водяным паром с использованием кислорода воздуха в присутствии гетерогенного катализатора V2O5 (или его аналога). Причем перекрытый водяной пар подается в дымовую трубу дважды, уже после прохождения дыма (газов) через «циклон». Воздух всасывается в дымовую трубу за счет разности давления в трубе и снаружи ее. Воздух играет роль и...
Миномет самоходный
Номер патента: 13710
Опубликовано: 14.08.2009
Авторы: Емельянов Владимир Анатольевич, Криворучко Валерий Николаевич, Сихимов Манас Камардинович, Хусаинов Марат Рахимович, Левин Александр Мейерович
МПК: F41F 1/06, F41A 23/34, F41A 23/54...
Метки: миномет, самоходный
Формула / Реферат:
Изобретение относится к военной технике. Техническим результатом является возможность легко менять огневую позицию, вести огонь с транспортирующего средства, обеспечение высокой защищенности боевого расчета при стрельбе и движении и высокой проходимости. Это достигается тем, что в миномете, содержащем транспортирующее средство, боевую часть миномета, включающую ствол, заряжаемый с дульной стороны, двуногу-лафет, подпятник с чашей под пяту...
Самоходный веерный генератор аэрозолей
Номер полезной модели: 701
Опубликовано: 15.09.2011
Авторы: Тагаев Орынбай Оразбекович, Мырзабеков Жаксылык Бигулович, Барахов Бахыт Бейсенбаевич, Малдыбаева Айгуль Абдрамановна, Сбанов Нурлан Бекбосынович
МПК: A61L 2/22
Метки: самоходный, генератор, аэрозолей, веерный
Формула / Реферат:
Полезная модель относится к средствам для аэрозольной обработки помещений большого объема: животноводческих помещений, птицефабрик, складов, теплиц и т.д. дезинфицирующими веществами.Технический результат достигаемый полезной моделью заключается в обеспечении автоматического реверсивного поворота распылителя генератора в пределах заданного угла поворота и самоходного перемещения генератора по помещению.Самоходный веерный аэрозольный генератор,...
Предыдущий патент: Дисковый нож для резки тросов
Следующий патент: Средство для закрепления анкера ампулами АМК
Случайный патент: Панкреатин, способ его получения и фармацевтическая композиция на его основе