Линейный электропривод
Номер патента: 2573
Опубликовано: 15.09.1995
Авторы: Сагимбаев Джилкибек Тойбакович, Едыгенов Ерик Казтаевич, Едыгенова Зара Васильевна
Формула / Реферат
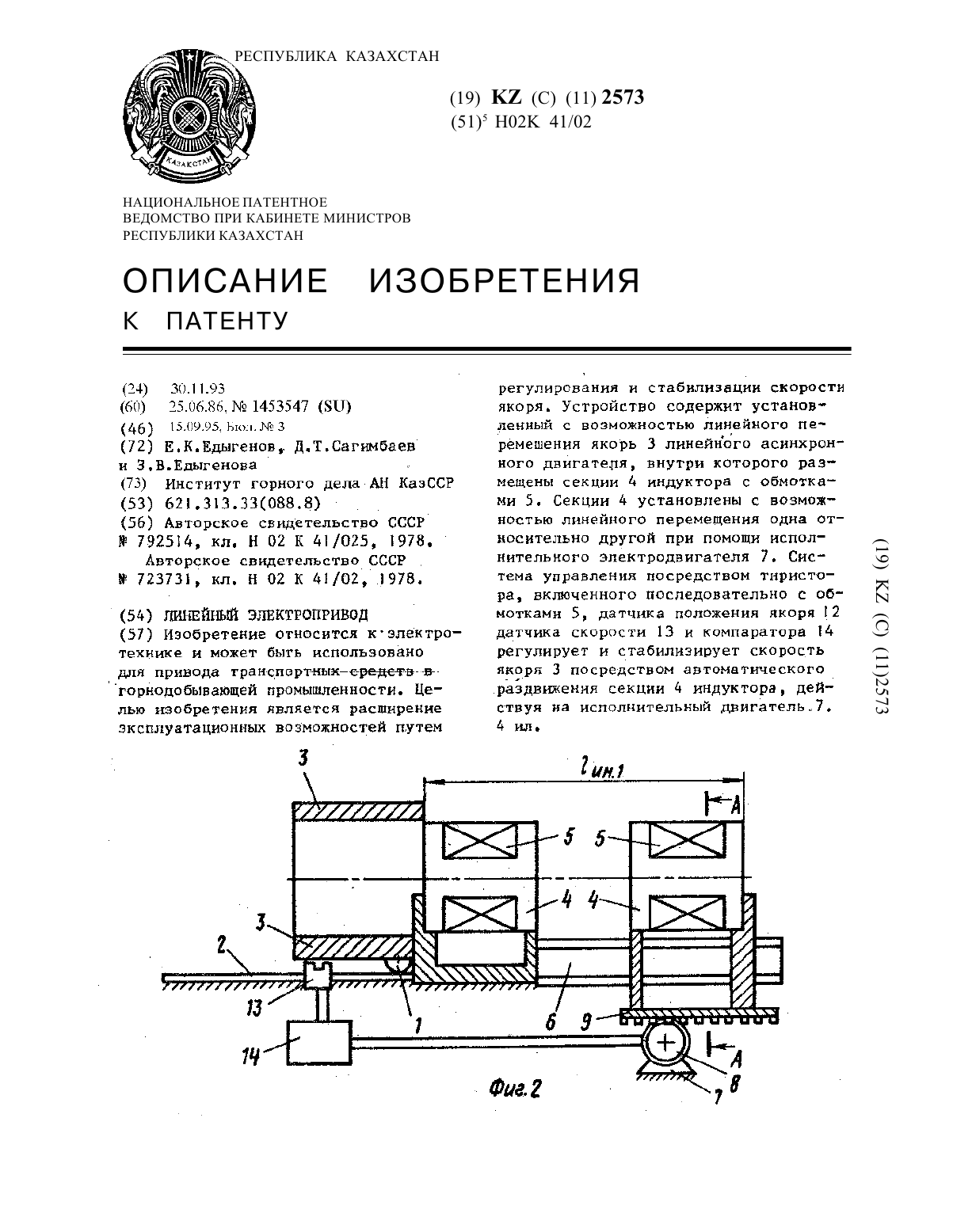
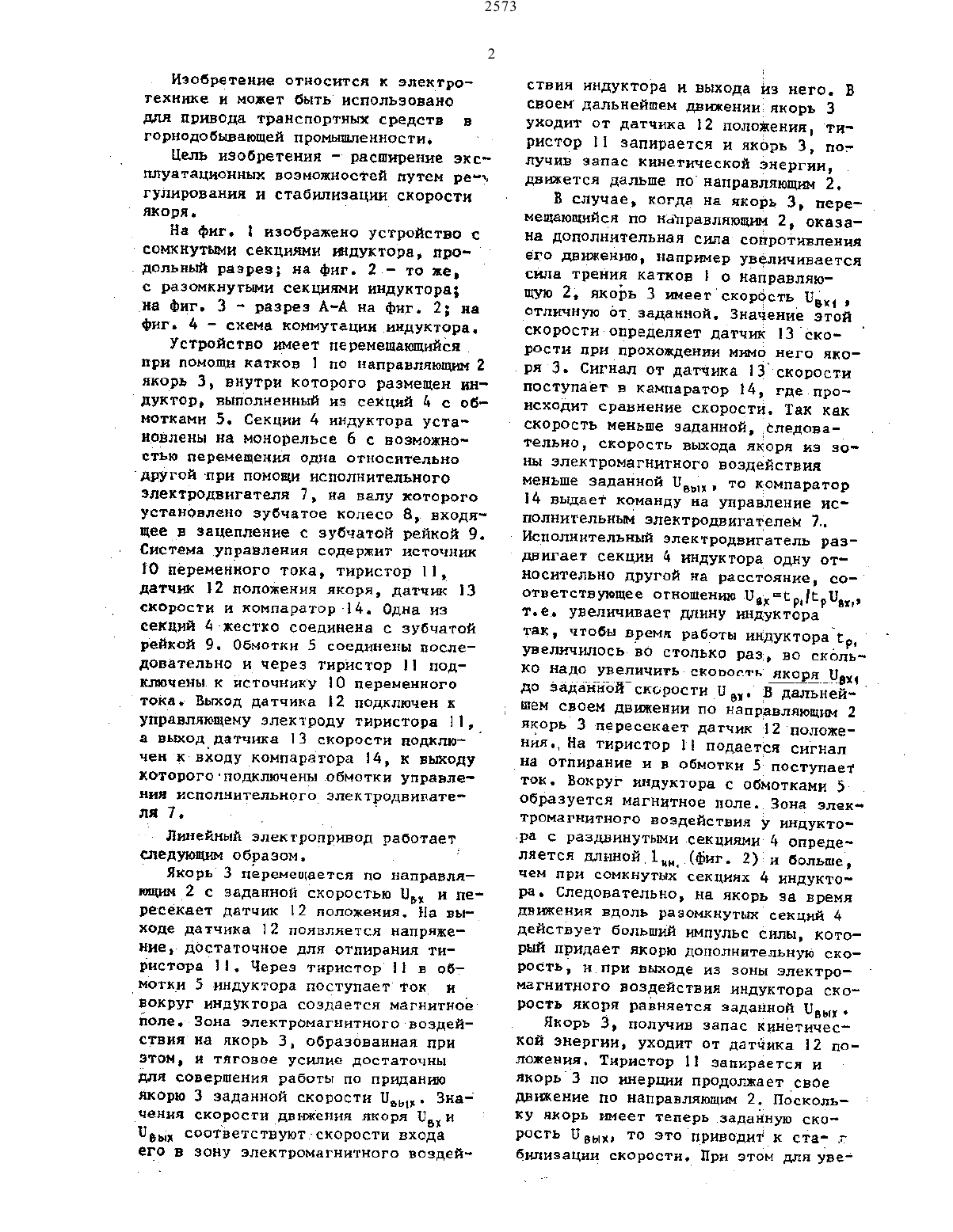
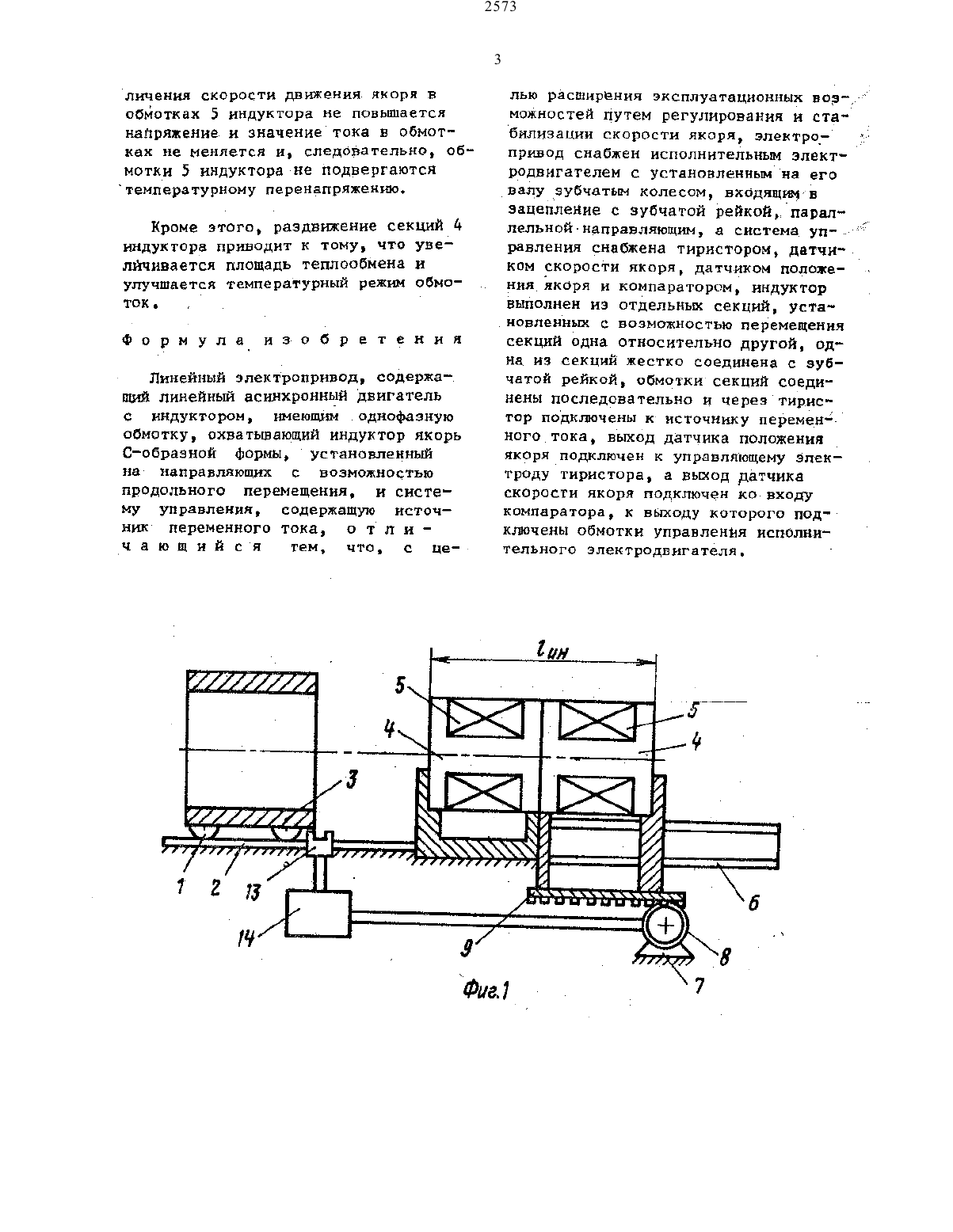
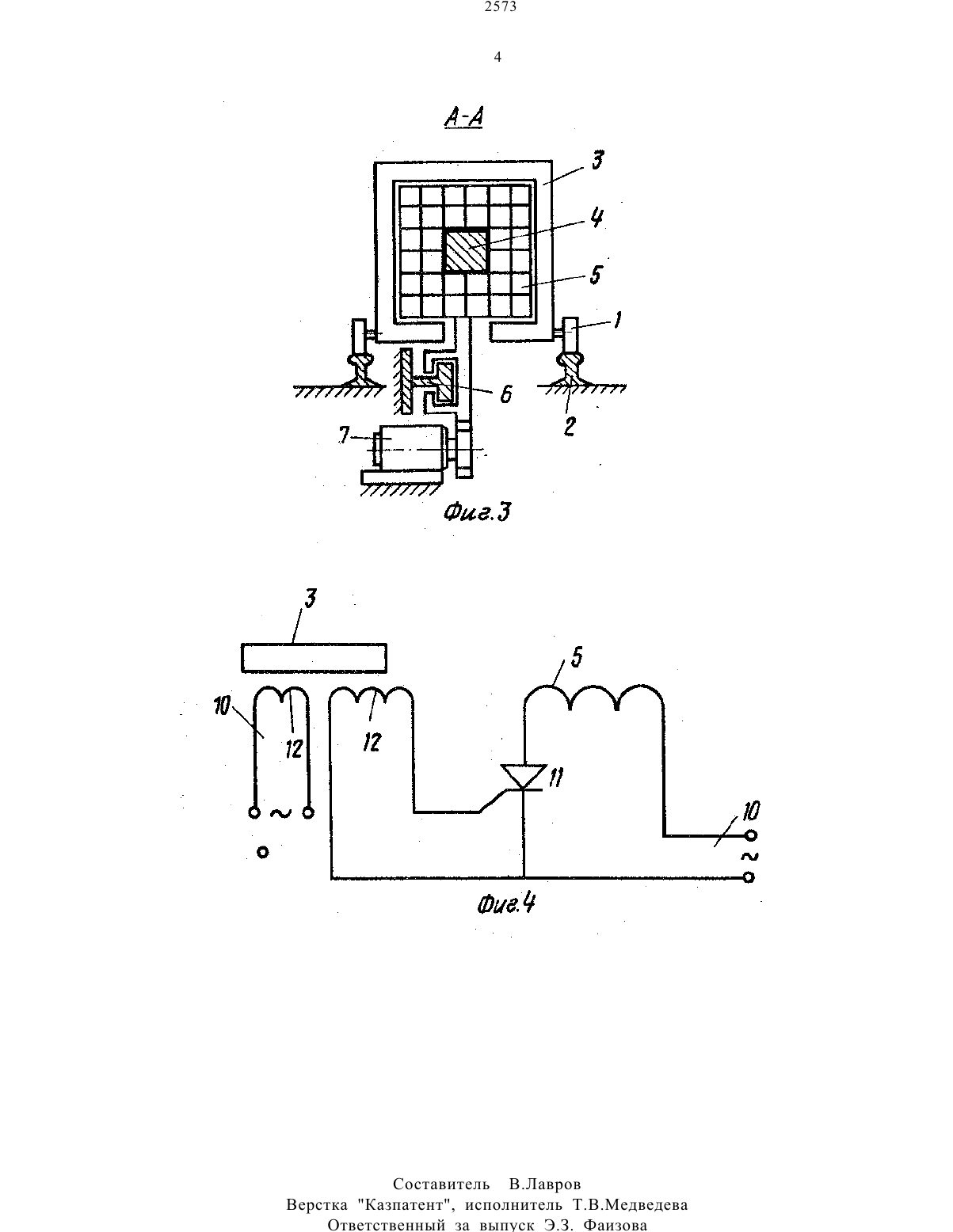
Изобретение относится к электротехнике и может быть использовано для привода-транспортных средств в горнодобывающей промышленности. Целью изобретения является расширение эксплуатационных возможностей путем регулирования и стабилизации скорости якоря. Устройство содержит установленный с возможностью линейного перемещения якорь 3 линейного асинхронного двигателя, внутри которого размещены секции 4 индуктора с обмотками 5. Секции 4 установлены с возможностью линейного перемещения одна относительно другой при помощи исполнительного электродвигателя 7. Система управления посредством тиристора, включенного последовательно с обмотками 5, датчика положения якоря 12 датчика скорости 13 и компаратора 14 регулирует и стабилизирует скорость якоря 3 посредством автоматического раздвижения секции 4 индуктора, действуя на исполнительный двигатель 7.
Текст
ремешення якорь 3 линейного асинхрон ного двигателя, внутри которого размещены секции 4 индуктора с обмотками 5. Секции 4 установлены с возможностью линейного перемещения одна относительно другой при помощи исполнительного электродвигателя 7. Сисо тема управления посредством тиристора, включенного последовательно с оомотками 5, датчика положении якоря 12 датчика скорости 13 и компаратора Ед регулирует и стабилизирует скорость якоря 3 посредством автоматического рвдвиженин секции 4 индуктора, действуя на исполнительный двигетель 7. 4 ил.(56) Авторское свидетельство СССР Ю 792514, кл. Н 02 К 41/025, 1978. Авторское свидетельствоСССР . 723731, кл. Н 02 К 1/О 2.97 Б.(57) Изобретение относится кэлектротехнике и может быть использовано для привода траНспортныисредетвпвПЬЮ ИЗОБРЕТЕНИЯ ЯВЛЯЕТСЯ расширение ЭКСЦЛУЕТЗЦНОНКЫХ ВОЗМОЖНОСТЕЙ ПУТЕМНзобретеиие относится к электротеннне н может быть использовано для привода транспортных средств в горнодобывающей промышлеииостнаЦель изобретения - расширение эксппуатационньо возможностей путем рант. гулнрования и стабилизации скорости якоря.сомкнутыми секциями индуктора, про.дольный разрез на фиг. 2 то же, С разомкнутьши СЗКЦНЯНН нНДУКТ 0 рна фиг. 3 - разрез АА на фиг 2 напри помощи катков 1 по направляющн 2якорь 3, внутри которого размещен ин дуктор выполненный из секций 6 с об мотками 5. Секции 4 индуктора устат новлены на монорельсе 6 с возможно ТЬЮ ПЕРВМЕЩЕНИЯ одна ОТНОСИТЕЛЬНОдругой при помощи исполнительногоэлектродвигателя 7, на валу которого установлено зубчатое колесо В, входящеев зацепление с зубчатой рейкой 9. Снстемауправлення содержит источник 10 переменного тока, тиристор 11,датчик 12 положения якоря, датчик 13 скорости н компаратор 14. Одна из секций д-жестко соединена с зубчатой рейкой 9. Обмотки 5 соединены поспедовательно ичерез тиристор 11 подключены.к источнику 10 переменного тока. Выход датчика 12 подключен к управляющему электроду тиристора 11 а выноддатчиша 13 скорости подключенк-входу компаратора 14, к выходу которого-подключены.обмотки управлеНИЯ НСПОПННТЗЛЬНО ГО ЗЛеК ТРОДВ НПЭТВ ля 7. Линейный электропривод работает следующи образом. .Якорь З перемещается по направляющнм 2 с заданной скоростью Ед, и пересекает датчик 12 положения. На выходе датчика 12 появляется напряжение,-достаточное для отпирания тиристора 11. Через тнрнстор 1 в об мотки 5 индуктора поступает ток ивокруг индуктора создается магнитное ноле.-Зона электромагнитного-воздействня на якорь 3, образованная при этом, н тяговое усилие достаточны для совершения работы по приданию якорю З заданной скорости Пъыд. Значения скорости движения якоря Пдхн Ивы, соответствуют скорости входа его в зону электромагнитного воздей ствия индуктора н выхода из него. В своем дальнейшем двненни якорь З уходит от датчика 12 положения, тиристор 11 запирается н якорь 3, пот пучнв запас кинетической энергии,двнется дальше понаправляющин 2.В случае, когда на якорь 3, перемещающийся по направляющм 2, оказана дополнительная сила сопротивления его движению, например увеличивается сила трения катков 1 о направляющую 2, якорь 3 иеетскоростьВд,отличную отзаданной. Значение этой скорости-определяет датчик 13 скорости при прохождении ммо него яко.ря 3. Сигнал от датчика 13 скоростипоступает в компаратор 14, где.происходит сравнение скоростн. Так как скорость меньше заданной,следовательно, скорость выхода якоря из зоны электромагнитного воздействия меньше заданной Пвд то компаратор 14 вьшает команду на управление исполнительным электродвигателем 7 Исполнительный электродвигатель раз ДВНГЗЕТ СЕКЦИИ д ННДУКТОРБ ОДНУ ОТносительно другой на расстояние, соответствующее отношени.Пд,сРДсРН т.е. увеличивает длину индукторатак, чтобы время работы индуктораувеличилось-во столько раз, во скольКО надо увеличить-скорость якоря цвшем своем движении по направляющим 2 якорь 3-пересекает датчик 12 положения.На тиристор 1 подаетря сигнал на отпирание и в обмотки 5 поступает ток. Вокруг индуктора с обмотками 5 5 Ра 3 УеТсЯ Магнитное поле.Зона электромагнитного воздействия у индукто-Рд С РЗЗДВИНУТЫНН-секциями-4 опреде ляется дЛННой 1(Фнг. 2)и больше,чем при сомкнутьж секциях 4 индуктора. Следовательно, на якорь за время двинсення вдоль разомкнутьххсекцнй д действует больший ипульс силы, который придает якорю дополнительную скорость, И при выходе из зоны электромагнитного воздействия индуктора скорость якоря равняется заданной Цвы,. Якорь 3, получив запас кинетической энергии, уходит от датика 12 положения. Тиристор 1 запирается и якорь 3 по инерции продолжает свое движение по направляющим 2. Поскольку якорь иеет теперьзаданную скорость Пдых, то это прНводнтк стае г бнлизации скорости, При этом для уве лнчення скорости движения-ЯКОРЯ В обмотках 5 индуктора не повышается ндпрядение.и значение тока в обмотках не меняется Н, СЛВДОВЗТВПЬНО 05 мотки 5 индуктора-Не ПОДВЭРГЗЮТСЯКроме этого, Раздвненне Секций 4 нндукторд приводит К ТОМУ, ЧТО УВЕ лнчнвается площадь ТеПЛ 5 а и улучшается температурный РЕЖИ 9 М ТОКлинейный электропривод, содержат щий линейный асинхронный двигатель с индуктором, иеющим .однофазнУю обмотку, охватьшеющнй индуктор якорь Собразной формы, установленный на- направляющих с возможностью продольного перемещения, н систему управления, содержащую источниш переменного тока, о тл н ч а ю Щ н й с я тем, что, с целью расширения эксплуатационных во 3 дможностей путем регулирования н ста бплнзацин скорости якоря, электрогпривод снабжен нслолннтельньм элект родвигателем с установленным на его валу зубчатьш колесом, входящи в зацепление с зубчатой рейкой, парап лельной-направляющим а система управнения снабжена тиристором, датчи ком скорости якоря, датчиком положенняякоря и компаратором, индуктор выполнен из отдельньш секций, устачСЕКЦИЙ Одна относительно другой, оде на из секций жестко соединена с зубчатой рейкой, обмотки секций соединены последовательно н череэтирнс тор подключены к источнику перемен 4 ноготока выход датчика положения якоря подключен к управляющему электроду тиристора, а вьшод датчика скорости якоря подключен ко-входу компаратора, к выходу которого подклчены обмотки управления исполнительного электродвигателя.Составитель В.Лавр 0 в Верстка Казпатент, исполнитель Т.В.Медведева Ответственный за выпуск Э.З. Фаизова
МПК / Метки
МПК: H02K 41/02
Метки: электропривод, линейный
Код ссылки
<a href="https://kz.patents.su/4-2573-linejjnyjj-elektroprivod.html" rel="bookmark" title="База патентов Казахстана">Линейный электропривод</a>
Линейный электропривод
Номер патента: 1981
Опубликовано: 15.03.1995
Автор: Едыгенов Ерик Казтаевич
МПК: H02K 41/04
Метки: электропривод, линейный
Формула / Реферат:
1. Линейный электропривод, содержащий подвижный якорь С-образного сечения и расположенный внутри него индуктор с обмоткой, отличающийся тем. что, с целью улучшения охлаждения обмотки, между индуктором и обмоткой расположены каналы, а индуктор выполнен полым, разделенным гибкой мембраной на две камеры, в одной из которых, выполненной герметичной, армированной диэлектриком и заполненной токопроводящей жидкостью, расположены электроды, соединенные...
Электромагнитное транспортное устройство
Номер патента: 1825
Опубликовано: 15.03.1995
Авторы: Едыгенов Ерик Казтаевич, Калашников Александр Андреевич
МПК: B65G 49/00
Метки: транспортное, устройство, электромагнитное
Формула / Реферат:
1. Электромагнитное транспортное устройство, включающее рабочие электромагниты соленоидного типа с окнами для прохождения контейнера, отличающееся тем, что, с целью обеспечения остановки контейнера в зоне действия рабочего электромагнита, оно снабжено тормозными приспособлениями, выполненными в виде подпружиненного якоря, укрепленного на рабочем электромагните, и рамки, шарнирно соединенной одним концом с рабочим электромагнитом, а другим - с...
Электромагнитная машина ударного действия
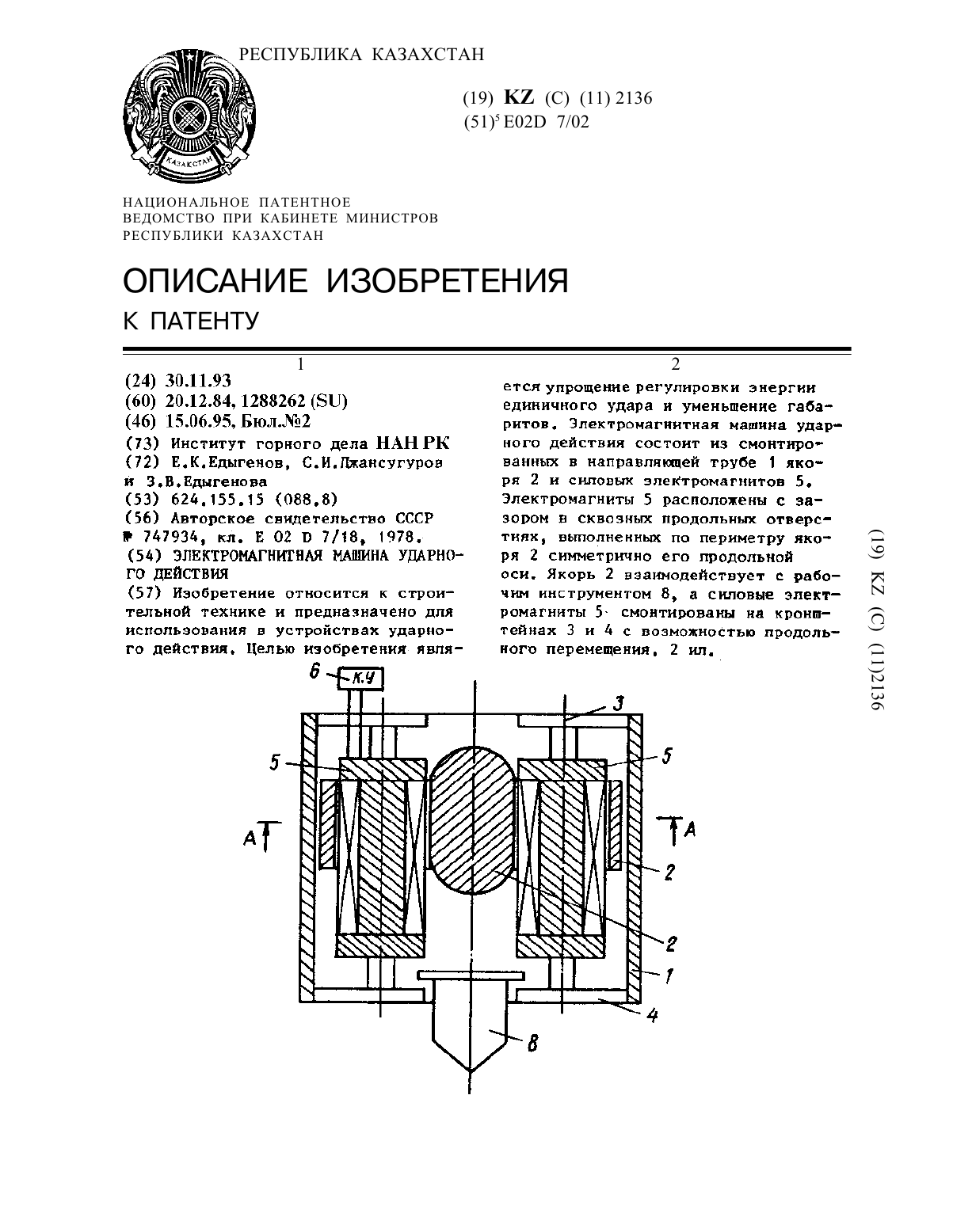
Номер патента: 2136
Опубликовано: 15.06.1995
Авторы: Едыгенов Ерик Казтаевич, Едыгенова Зара Васильевна, Джансугуров Саят Ильясович
МПК: E02D 7/02
Метки: машина, ударного, электромагнитная, действия
Формула / Реферат:
Изобретение относится к строительной технике и предназначено для использования в устройствах ударного действия. Целью изобретения является упрощение регулировки энергии единичного удара и уменьшение габаритов. Электромагнитная машина ударного действия состоит из смонтированных в направляющей трубе 1 якоря 2 и силовых электромагнитов 5. Электромагниты 5 расположены с зазором в сквозных продольных отверстиях, выполненных по периметру якоря 2...
Система управления стояночным тормозом
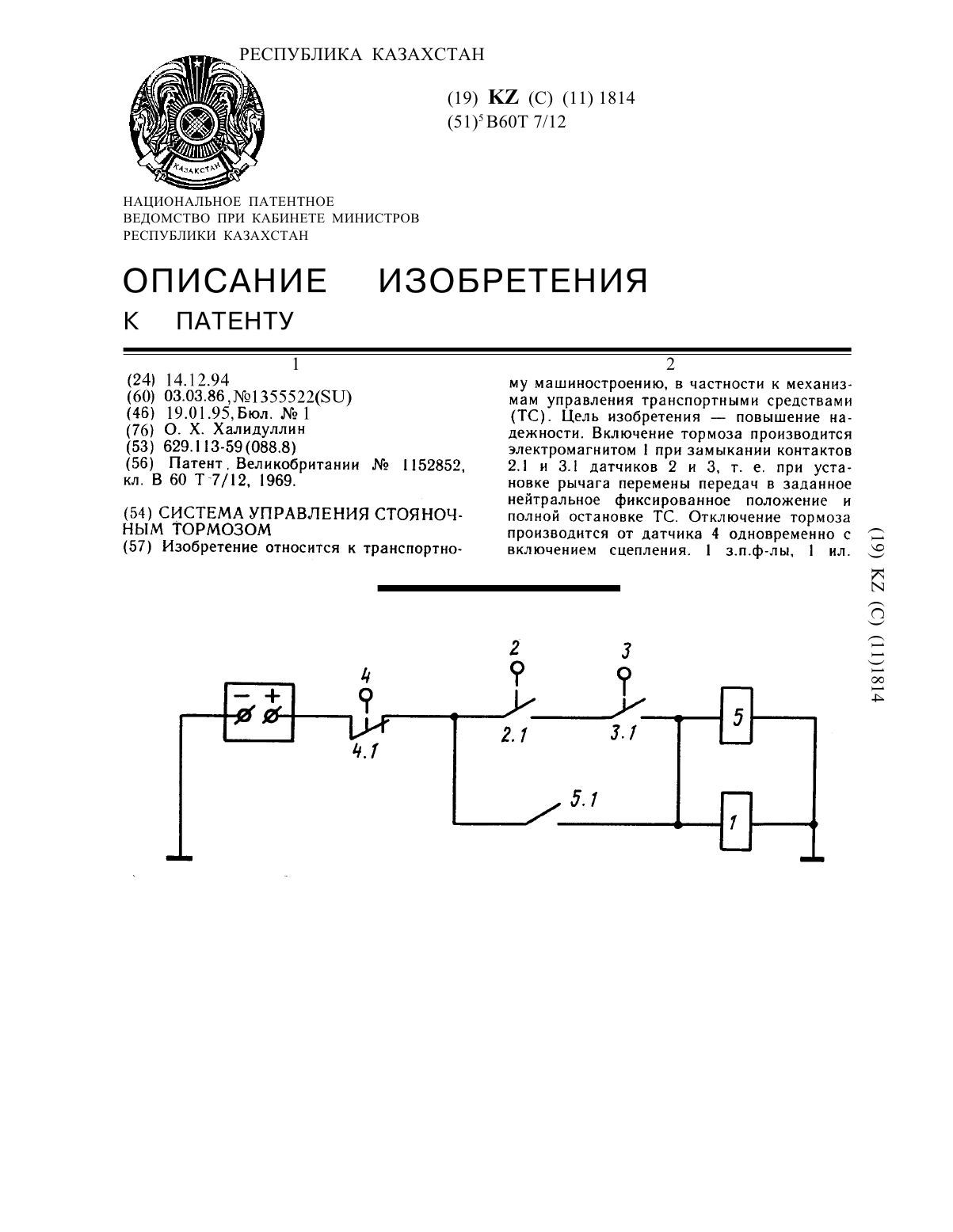
Номер патента: 1814
Опубликовано: 15.03.1995
Автор: Халидуллин Олег Ханышевич
МПК: B60T 7/12
Метки: система, тормозом, стояночным, управления
Формула / Реферат:
Изобретение относится к транспортному машиностроению, в частности к механизмам управления транспортными средствами (ТС). Цель изобретения — повышение надежности. Включение тормоза производится электромагнитом 1 при замыкании контактов 2.1 и 3.1 датчиков 2 и 3, т. е. при установке рычага перемены передач в заданное нейтральное фиксированное положение и полной остановке ТС. Отключение тормоза производится от датчика 4 одновременно с включением...
Секция механизированной безразгрузочной крепи
Номер предварительного патента: 2035
Опубликовано: 15.06.1995
Авторы: Мерцалов Ростислав Владимирович, Дашковский Георгий Абрамович, Баймухаметов Сергазы Кабиевич, Кравец Алексей Григорьевич, Ким Ольгерд Васильевич
МПК: E21D 23/00
Метки: секция, безразгрузочной, механизированной, крепи
Формула / Реферат:
Изобретение относится к устройствам для поддержания и управления кровлей. В предлагаемой секции механизированной безразгрузочной крепи, включающей основание и верхняк на гусеничном ходу, установленные между ними стойки и ограждения, основание и верхняк снабжены системой синхронизации перемещения, гидродомкратами передвижки и приводными звездочками, причем последние соединены посредством рычагов и храповых муфт. При передвижке предлагаемой...
Предыдущий патент: Устройство для токовой защиты кабельной линии от замыкания на землю
Следующий патент: Многоцелевое самоходное транспортное средство
Случайный патент: Способ производства сыра