Роторный экскаватор
Номер патента: 14819
Опубликовано: 15.02.2007
Авторы: Ахметов Мажит Фахретдинович, Жұмабек Алембек Гинаятұлы, Тауекелев Ренат Нурекелевич, Омаров Амангельды Джумагалиевич
Формула / Реферат
Изобретение относится к экскавационно-транспортным машинамнепрерывного действия (ЭТМ НД), в частности, к карьерным роторным экскаваторам,предназначенных для земляных, вскрышных и добычных работ в карьерах горнойпромышленности, стройиндустрии, промышленном и ирригационном строительствах.Роторный экскаватор включает типовую ходовую часть, опорно-поворотнуюплатформу, роторное рабочее оборудование, включающее ротор, роторную стрелу сприемным конвейером, перегрузочный конвейер, смонтированный на стойке,отвальное конвейерное оборудование, включающее отвальную стрелу с отвальнымконвейером, гидроцилиндры подъема-опускания стрел, электромеханический привод имеханизм поворота опорно-поворотной платформы.
Текст
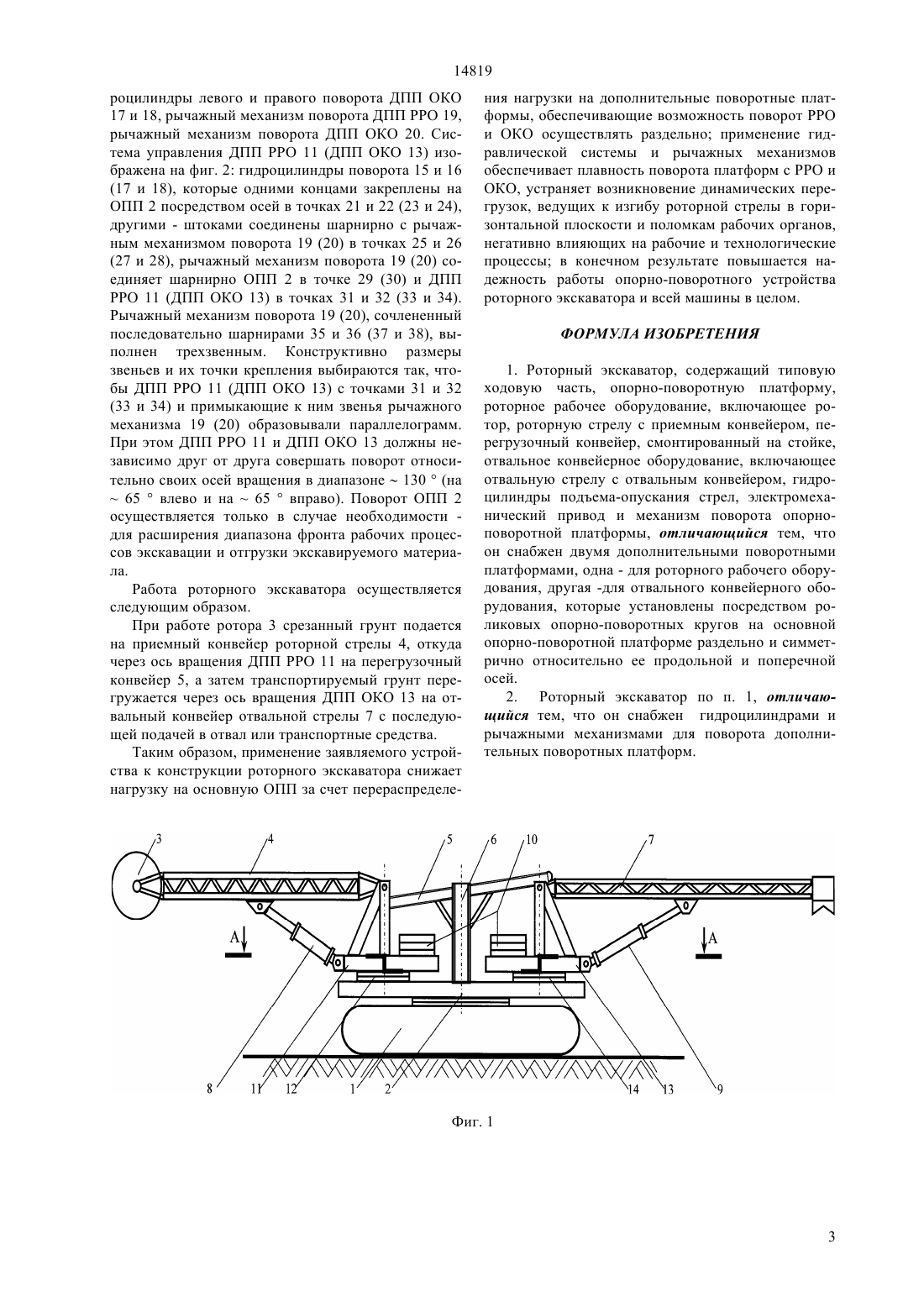
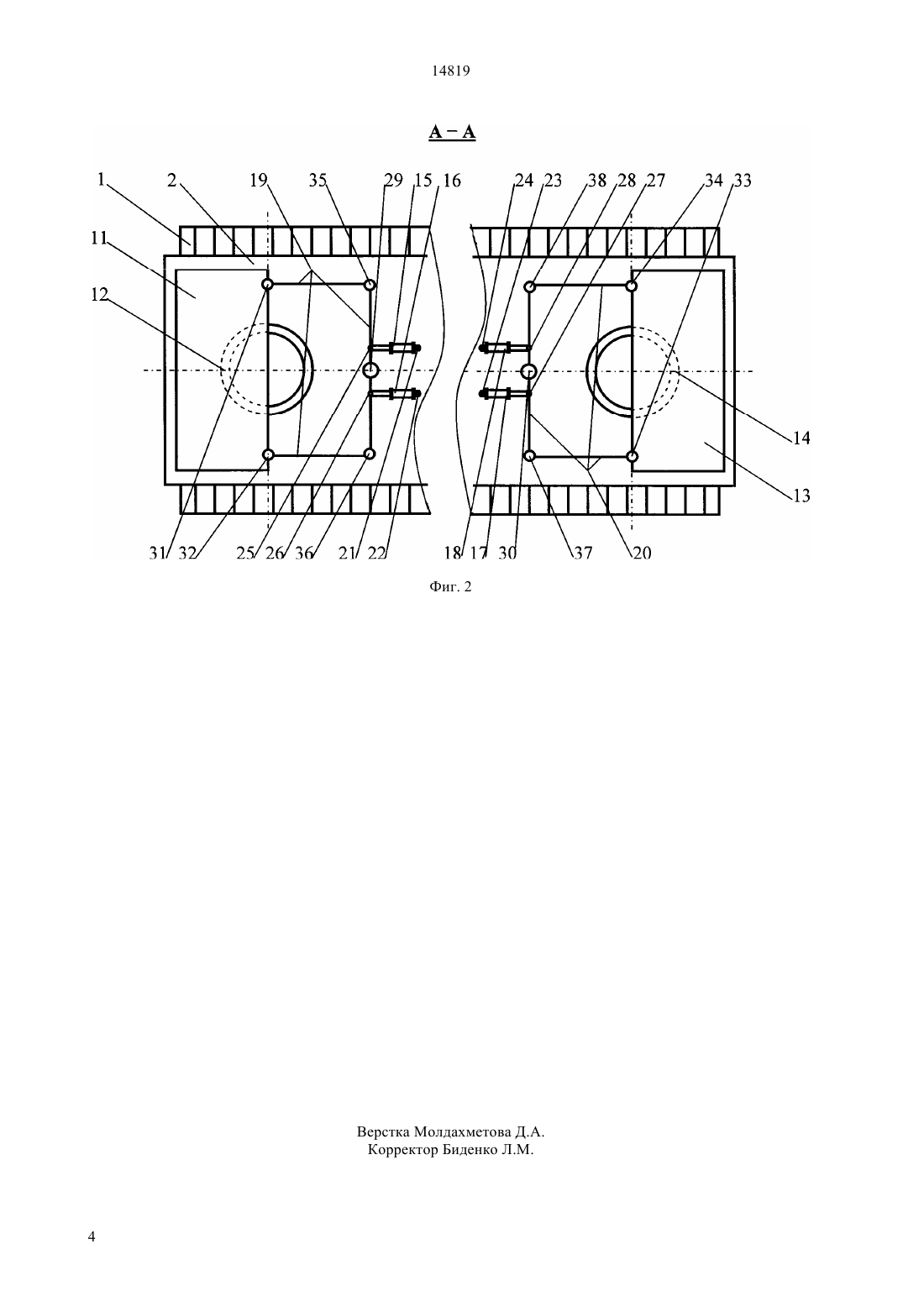
КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ тированный на стойке, отвальное конвейерное оборудование, включающее отвальную стрелу с отвальным конвейером, гидроцилиндры подъемаопускания стрел, электромеханический привод и механизм поворота опорно-поворотной платформы. Новым является то, что он снабжен двумя дополнительными поворотными платформами, одна для роторного рабочего оборудования, другая - для отвального конвейерного оборудования, которые установлены посредством роликовых опорноповоротных кругов на основной опорно-поворотной платформе раздельно и симметрично относительно ее продольной и поперечной осей. Поворот дополнительных поворотных платформ осуществляется гидроцилиндрами через рычажные механизмы. Технический результат - повышение надежности работы, увеличение срока службы механизмов и элементов конструкции опорно-поворотной платформы, предотвращение изгиба роторной стрелы в горизонтальной плоскости и упрощение конструкции системы управления.(72) Омаров Амангельды Джумагалиевич Таукелев Ренат Нурекелевич Ахметов Мажит Фахретдинович Джумабеков Алембек Гинаятович(56) Горовой А.И. Справочник по горнотранспортным машинам непрерывного действия. М., Недра,1982, с. 23, 26-27.(57) Изобретение относится к экскавационнотранспортным машинам непрерывного действия(ЭТМ НД), в частности, к карьерным роторным экскаваторам,предназначенным для земляных,вскрышных и добычных работ в карьерах горной промышленности, стройиндустрии, промышленном и ирригационном строительствах. Роторный экскаватор включает типовую ходовую часть, опорноповоротную платформу, роторное рабочее оборудование, включающее ротор, роторную стрелу с приемным конвейером, перегрузочный конвейер, смон 14819 Изобретение относится к экскавационнотранспортным машинам непрерывного действия(ЭТМ НД), в частности, к карьерным роторным экскаваторам,предназначенным для земляных,вскрышных и добычных работ в карьерах горной промышленности, стройиндустрии, промышленном и ирригационном строительствах. Известны роторные экскаваторы, включающие опорно-поворотную платформу (ОПП), надстройки,расположенные на ОПП, роторное рабочее оборудование (РРО) и отвальное конвейерное оборудование (ОКО), электромеханический привод и механизм управления поворотом платформы (а. с. СССР 1680879, кл. Е 02 3/18, 1991 а. с. СССР 1411382, кл. Е 02 3/18, 1988 а. с. СССР 212833, кл. Е 02 3/22, 1968 а. с. СССР 114140, кл. Е 02 3/22, 1959). Недостатками этих машин являются высокая наг-руженность опорно-поворотной платформы надстройками, конструкция роторной стрелы подвергается деформации изгиба в горизонтальной плоскости, а также сложность системы управления РРО и ОКО, поскольку управление осуществляется электромеханическими приводами посредством канатно-блочных систем, что усложняет конструкцию,увеличивает число узлов, трудоемкость изготовления и технического обслуживания, а при их износе возникают динамические перегрузки во время рабочего и технологического процессов. Наиболее близкими к заявляемому роторному экскаватору по технической и технологической сущности и достигаемому результату являются существующие роторные экскаваторы моделей ЭР 0251, ЭР-1001, СРС-280. Роторный экскаватор модели ЭР-1001, взятый за прототип, включает роторное рабочее и отвальное конвейерное оборудование,расположенное на опорно-поворотной платформе,гидроцилиндр подъема-опускания стрелы, электромеханический привод и механизм управления поворотом платформы (Горовой А.И. Справочник по горнотранспортным машинам непрерывного действия. М., Недра, 1982, с. 191). Недостатками прототипа являются концентрации больших нагрузок на механизмы поворота опорноповоротной платформы от действия сил тяжести РРО, ОКО и динамических перегрузок. Вследствие того, что поворот ОПП вместе с РРО и ОКО требует больших усилий на электромеханический привод поворота, это обуславливает интенсивный износ механизмов поворота и деформацию изгиба конструкции роторной стрелы в горизонтальной плоскости, негативно влияющие на рабочие и технологические процессы. Увеличивается количество технического обслуживания и ремонта по замене элементов механизма поворота. Техническая задача - повышение надежности работы, снижение нагрузок на механизмы и элементы конструкции опорно-поворотной платформы от действия сил тяжести РРО и ОКО, устранение динамических перегрузок, ведущих к деформации изгиба конструкции роторной стрелы в горизонтальной 2 плоскости во время рабочего процесса и упрощение конструкции системы управления. Технический результат - повышение надежности работы, увеличение срока службы механизмов и элементов конструкции опорно-поворотной платформы, предотвращение изгиба роторной стрелы в горизонтальной плоскости и упрощение конструкции системы управления. Технический результат достигается тем, что роторный экскаватор, содержащий типовую ходовую часть, опорно-поворотную платформу, роторное рабочее оборудование, включающее ротор, роторную стрелу с приемным конвейером, перегрузочный конвейер, смонтированный на стойке, отвальное конвейерное оборудование, включающее отвальную стрелу с отвальным конвейером, гидроцилиндры подъема-опускания стрел, электромеханический привод и механизм поворота опорно-поворотной платформы, согласно изобретению, снабжен двумя дополнительными поворотными платформами, одна- для роторного рабочего оборудования, другая - для отвального конвейерного оборудования, которые установлены посредством роликовых опорноповоротных кругов на основной опорно-поворотной платформе раздельно и симметрично относительно ее продольной и поперечной осей. Роторный экскаватор снабжен гидроцилиндрами и рычажными механизмами для поворота дополнительных поворотных платформ. Дополнительные поворотные платформы могут совершать поворот относительно своих осей вращения независимо друг от друга, тем самым снижается нагрузка на ОПП за счет перераспределения нагрузки на дополнительные поворотные платформы, причем поворот дополнительных поворотных платформ осуществляется гидроцилиндрами через рычажные механизмы, что устраняет возникновение динамических перегрузок, изгиб стрелы, упрощает конструкцию системы управления и повышает надежность работы. Устройство поясняется чертежами. На фиг. 1 изображен роторный экскаватор с предлагаемыми дополнительными поворотными платформами(ДПП), общий вид на фиг. 2 изображено устройство поворота ДПП РРО и ДПП ОКО (устройство поворота ДПП ОКО аналогично устройству поворота ДПП РРО), сечение А-А на фиг. 1. Роторный экскаватор включает типовую ходовую часть 1, опорно-поворотную платформу 2, ротор 3, роторную стрелу с приемным конвейером 4,перегрузочный конвейер 5, смонтированный на стойке 6, расположенной в центре ОПП 2, отвальную стрелу с отвальным конвейером 7, гидроцилиндр подъема-опускания роторной стрелы 8, гидроцилиндр подъема-опускания отвальной стрелы 9,противовесы 10, дополнительную поворотную платформу РРО 11, установленную посредством роликового опорно-поворотного круга 12 на ОПП 2,дополнительную поворотную платформу ОКО 13,установленную посредством роликового опорноповоротного круга 14 на ОПП 2, гидроцилиндры левого и правого поворота ДПП РРО 15 и 16, гид 14819 роцилиндры левого и правого поворота ДПП ОКО 17 и 18, рычажный механизм поворота ДПП РРО 19,рычажный механизм поворота ДПП ОКО 20. Система управления ДПП РРО 11 (ДПП ОКО 13) изображена на фиг. 2 гидроцилиндры поворота 15 и 16(17 и 18), которые одними концами закреплены на ОПП 2 посредством осей в точках 21 и 22 (23 и 24),другими - штоками соединены шарнирно с рычажным механизмом поворота 19 (20) в точках 25 и 26(27 и 28), рычажный механизм поворота 19 (20) соединяет шарнирно ОПП 2 в точке 29 (30) и ДПП РРО 11 (ДПП ОКО 13) в точках 31 и 32 (33 и 34). Рычажный механизм поворота 19 (20), сочлененный последовательно шарнирами 35 и 36 (37 и 38), выполнен трехзвенным. Конструктивно размеры звеньев и их точки крепления выбираются так, чтобы ДПП РРО 11 (ДПП ОКО 13) с точками 31 и 32(33 и 34) и примыкающие к ним звенья рычажного механизма 19 (20) образовывали параллелограмм. При этом ДПП РРО 11 и ДПП ОКО 13 должны независимо друг от друга совершать поворот относительно своих осей вращения в диапазоне 130(на 65 влево и на 65 вправо). Поворот ОПП 2 осуществляется только в случае необходимости для расширения диапазона фронта рабочих процессов экскавации и отгрузки экскавируемого материала. Работа роторного экскаватора осуществляется следующим образом. При работе ротора 3 срезанный грунт подается на приемный конвейер роторной стрелы 4, откуда через ось вращения ДПП РРО 11 на перегрузочный конвейер 5, а затем транспортируемый грунт перегружается через ось вращения ДПП ОКО 13 на отвальный конвейер отвальной стрелы 7 с последующей подачей в отвал или транспортные средства. Таким образом, применение заявляемого устройства к конструкции роторного экскаватора снижает нагрузку на основную ОПП за счет перераспределе ния нагрузки на дополнительные поворотные платформы, обеспечивающие возможность поворот РРО и ОКО осуществлять раздельно применение гидравлической системы и рычажных механизмов обеспечивает плавность поворота платформ с РРО и ОКО, устраняет возникновение динамических перегрузок, ведущих к изгибу роторной стрелы в горизонтальной плоскости и поломкам рабочих органов,негативно влияющих на рабочие и технологические процессы в конечном результате повышается надежность работы опорно-поворотного устройства роторного экскаватора и всей машины в целом. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Роторный экскаватор, содержащий типовую ходовую часть, опорно-поворотную платформу,роторное рабочее оборудование, включающее ротор, роторную стрелу с приемным конвейером, перегрузочный конвейер, смонтированный на стойке,отвальное конвейерное оборудование, включающее отвальную стрелу с отвальным конвейером, гидроцилиндры подъема-опускания стрел, электромеханический привод и механизм поворота опорноповоротной платформы, отличающийся тем, что он снабжен двумя дополнительными поворотными платформами, одна - для роторного рабочего оборудования, другая -для отвального конвейерного оборудования, которые установлены посредством роликовых опорно-поворотных кругов на основной опорно-поворотной платформе раздельно и симметрично относительно ее продольной и поперечной осей. 2. Роторный экскаватор по п. 1, отличающийся тем, что он снабжен гидроцилиндрами и рычажными механизмами для поворота дополнительных поворотных платформ.
МПК / Метки
Метки: роторный, экскаватор
Код ссылки
<a href="https://kz.patents.su/4-14819-rotornyjj-ekskavator.html" rel="bookmark" title="База патентов Казахстана">Роторный экскаватор</a>
Роторный экскаватор.
Номер патента: 1923
Опубликовано: 15.03.1995
Авторы: Белик Александр Николаевич, Джиенкулов Сергазы Ахметович, Тукибаев Серик Мелдекулович, Нурпеисов Дулат Досанович, Таукелев Ренат Нурекелович, Раздыков Киса Ашимович
МПК: E02F 3/18
Метки: экскаватор, роторный
Формула / Реферат:
Изобретение относится к экскаваторам и может быть использовано на экскавационных работах в различных отраслях народного хазяйетва. Цель изобретения - повышение эффективности технологического и рабочего процессов отработки забоя за счет установки положения ротора относительно каждого разрабатываемого слоя забоя во всех его точках. Роторный экскаватор включает ходовую часть, платформу с надстройкой, ротор с инерционной нижней разгрузкой,...
Одноковшовый гидравлический экскаватор
Номер предварительного патента: 5048
Опубликовано: 15.08.1997
Автор: Зорин Александр Дмитриевич
МПК: E02F 3/42
Метки: экскаватор, одноковшовый, гидравлический
Формула / Реферат:
Изображение относится к землеройной технике, в частности, к одноковшовым гидравлическим экскаваторам.
Достигаемый изобретением технический результат - уменьшение металлоемкости и энергозатрат.
Экскаватор включает поворотную платформу, силовую установку с приводом, рабочее оборудование - стрелу, рукоять и ковш.
Новым является то, что силовая установка использована в качестве противовеса рабочему оборудованию.
Опорно-поворотное устройство
Номер предварительного патента: 4043
Опубликовано: 16.12.1996
Авторы: Токенов Елеусиз Актокашевич, Ермеков Толеухан Ермекович, Клинов Владимир Евгеньевич, Рисс Владимир Иосифович, Апиев Бакыт Молдабекович
МПК: E21C 35/02
Метки: устройство, опорно-поворотное
Формула / Реферат:
Изобретение относится к оборудованию промышленности и может быть использовано в проходческих комбайнах, выемочных машинах и манипуляторах.Техническим результатом от применения изобретения является объединение устройства поворота поворотной платформы и устройства фиксации положения стрелы с рабочим органом.Технический результат достигается тем, что в устройстве,включающем базовую раму, поворотную платформу и ползун, связанный с поворотным...
Роторный двигатель внутреннего сгорания
Номер предварительного патента: 4319
Опубликовано: 14.03.1997
Автор: Туленов Кали
МПК: F02B 53/00
Метки: внутреннего, сгорания, двигатель, роторный
Формула / Реферат:
Изобретение относится к двигателестроению.Техническим результатом изобретения является упрощение конструкции, снижение металлоемкости и повышение мощности. Роторный двигатель внутреннего сгорания содержит корпус с эксцентрично размещенным в нем на валу ротором и радиальными лопатками, образующими между корпусом и ротором рабочие камеры переменного объема, роторные кольца, при этом один конец каждой лопатки шарнирно закреплен к корпусу, а второй...
Роторный аппарат гидроударного действия

Номер патента: 426
Опубликовано: 15.03.1994
Автор: Сайпеев Геннадий Александрович
МПК: B01F 7/12
Метки: действия, гидроударного, роторный, аппарат
Формула / Реферат:
Изобретение относится к смешиванию материалов и может быть использовано, например, в процессах диспергирования суспензий за счет гидроударов и кавитации и позволяет интенсифицировать процесс диспергирования путем повышения силы гидравлического удара и гидравлической кавитации. Роторный аппарат содержит корпус 1 с концентричным ротором А и статором 5, имеющими щели в боковых стенках. Щели ротора выполнены в виде дозвуковых сопл 5, сужающихся к...
Предыдущий патент: Способ ремонта межпанельных швов крупнопанельных зданий
Следующий патент: Способ ремонта утеплительного слоя наружных панелей зданий и сооружений
Случайный патент: Способ переработки на глинозем низкокачественного боксита